

How to Attain Load-Sharing in Multi-robot Systems
APR 2, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Multi-Robot Load-Sharing Background and Objectives
Multi-robot systems have emerged as a transformative paradigm in robotics, evolving from single-agent autonomous systems to sophisticated collaborative networks capable of executing complex tasks beyond the capabilities of individual robots. The concept of load-sharing in multi-robot systems represents a fundamental shift from traditional centralized control architectures to distributed computational and operational frameworks.
The historical development of multi-robot systems can be traced back to the early 1990s when researchers began exploring swarm intelligence and distributed robotics. Initial implementations focused primarily on simple coordination tasks such as formation control and basic task allocation. However, as computational capabilities advanced and communication technologies improved, the scope expanded to encompass sophisticated load-sharing mechanisms that enable dynamic distribution of computational burdens, sensing responsibilities, and actuarial tasks across robot networks.
Load-sharing in multi-robot systems encompasses multiple dimensions including computational load distribution, task allocation optimization, resource sharing, and collaborative decision-making processes. This approach addresses inherent limitations of individual robots such as processing constraints, energy limitations, sensor coverage restrictions, and single points of failure that can compromise mission success.
The technological evolution has been driven by advances in wireless communication protocols, distributed computing algorithms, and real-time coordination mechanisms. Modern multi-robot systems leverage sophisticated networking architectures that enable seamless information exchange and coordinated action execution while maintaining system robustness and fault tolerance.
The primary objective of achieving effective load-sharing in multi-robot systems centers on optimizing collective performance through intelligent distribution of responsibilities and resources. This involves developing algorithms that can dynamically assess individual robot capabilities, current system states, and task requirements to make optimal allocation decisions in real-time environments.
Key technical goals include minimizing communication overhead while maintaining coordination effectiveness, ensuring equitable load distribution to prevent individual robot overloading, implementing fault-tolerant mechanisms that maintain system functionality despite individual robot failures, and achieving scalable architectures that can accommodate varying numbers of participating robots without performance degradation.
Furthermore, the objectives extend to developing adaptive load-balancing strategies that can respond to changing environmental conditions, varying task complexities, and dynamic robot availability. This requires sophisticated prediction algorithms, real-time monitoring systems, and intelligent decision-making frameworks that can optimize system-wide performance metrics while maintaining individual robot operational constraints.
The historical development of multi-robot systems can be traced back to the early 1990s when researchers began exploring swarm intelligence and distributed robotics. Initial implementations focused primarily on simple coordination tasks such as formation control and basic task allocation. However, as computational capabilities advanced and communication technologies improved, the scope expanded to encompass sophisticated load-sharing mechanisms that enable dynamic distribution of computational burdens, sensing responsibilities, and actuarial tasks across robot networks.
Load-sharing in multi-robot systems encompasses multiple dimensions including computational load distribution, task allocation optimization, resource sharing, and collaborative decision-making processes. This approach addresses inherent limitations of individual robots such as processing constraints, energy limitations, sensor coverage restrictions, and single points of failure that can compromise mission success.
The technological evolution has been driven by advances in wireless communication protocols, distributed computing algorithms, and real-time coordination mechanisms. Modern multi-robot systems leverage sophisticated networking architectures that enable seamless information exchange and coordinated action execution while maintaining system robustness and fault tolerance.
The primary objective of achieving effective load-sharing in multi-robot systems centers on optimizing collective performance through intelligent distribution of responsibilities and resources. This involves developing algorithms that can dynamically assess individual robot capabilities, current system states, and task requirements to make optimal allocation decisions in real-time environments.
Key technical goals include minimizing communication overhead while maintaining coordination effectiveness, ensuring equitable load distribution to prevent individual robot overloading, implementing fault-tolerant mechanisms that maintain system functionality despite individual robot failures, and achieving scalable architectures that can accommodate varying numbers of participating robots without performance degradation.
Furthermore, the objectives extend to developing adaptive load-balancing strategies that can respond to changing environmental conditions, varying task complexities, and dynamic robot availability. This requires sophisticated prediction algorithms, real-time monitoring systems, and intelligent decision-making frameworks that can optimize system-wide performance metrics while maintaining individual robot operational constraints.
Market Demand for Collaborative Multi-Robot Systems
The global market for collaborative multi-robot systems is experiencing unprecedented growth driven by increasing automation demands across diverse industries. Manufacturing sectors are leading this transformation, with automotive assembly lines, electronics production facilities, and pharmaceutical manufacturing plants increasingly adopting multi-robot configurations to enhance productivity and maintain competitive advantages. These systems enable synchronized operations where multiple robots share computational and physical workloads, resulting in improved throughput and operational efficiency.
Warehouse automation and logistics represent another significant market driver, particularly accelerated by e-commerce expansion and supply chain optimization requirements. Distribution centers are implementing collaborative robot fleets for inventory management, order fulfillment, and material handling operations. The ability to dynamically distribute tasks among multiple robots based on real-time conditions and system capacity has become essential for meeting fluctuating demand patterns and maintaining service level agreements.
Healthcare and medical device industries are emerging as high-growth segments for collaborative multi-robot applications. Surgical robotics, laboratory automation, and pharmaceutical research facilities require precise coordination between multiple robotic units to perform complex procedures and analytical tasks. Load-sharing capabilities in these environments ensure redundancy, improve safety margins, and enable more sophisticated medical interventions that would be impossible with single-robot configurations.
Construction and infrastructure development sectors are increasingly recognizing the potential of collaborative robot systems for large-scale projects. Multi-robot teams can coordinate complex construction tasks, share heavy lifting operations, and adapt to dynamic work environments while maintaining safety standards. The construction industry's growing emphasis on automation and precision manufacturing is creating substantial market opportunities for load-sharing multi-robot solutions.
Agricultural automation represents an expanding market segment where collaborative multi-robot systems address labor shortages and precision farming requirements. Autonomous farming equipment, crop monitoring systems, and harvesting operations benefit significantly from coordinated robot teams that can cover large areas efficiently while sharing computational resources and task responsibilities. The agricultural sector's adoption of smart farming technologies continues to drive demand for sophisticated multi-robot coordination capabilities.
Defense and security applications constitute a specialized but significant market segment requiring robust multi-robot collaboration for surveillance, reconnaissance, and tactical operations. These applications demand highly reliable load-sharing mechanisms to ensure mission continuity and operational effectiveness in challenging environments.
Warehouse automation and logistics represent another significant market driver, particularly accelerated by e-commerce expansion and supply chain optimization requirements. Distribution centers are implementing collaborative robot fleets for inventory management, order fulfillment, and material handling operations. The ability to dynamically distribute tasks among multiple robots based on real-time conditions and system capacity has become essential for meeting fluctuating demand patterns and maintaining service level agreements.
Healthcare and medical device industries are emerging as high-growth segments for collaborative multi-robot applications. Surgical robotics, laboratory automation, and pharmaceutical research facilities require precise coordination between multiple robotic units to perform complex procedures and analytical tasks. Load-sharing capabilities in these environments ensure redundancy, improve safety margins, and enable more sophisticated medical interventions that would be impossible with single-robot configurations.
Construction and infrastructure development sectors are increasingly recognizing the potential of collaborative robot systems for large-scale projects. Multi-robot teams can coordinate complex construction tasks, share heavy lifting operations, and adapt to dynamic work environments while maintaining safety standards. The construction industry's growing emphasis on automation and precision manufacturing is creating substantial market opportunities for load-sharing multi-robot solutions.
Agricultural automation represents an expanding market segment where collaborative multi-robot systems address labor shortages and precision farming requirements. Autonomous farming equipment, crop monitoring systems, and harvesting operations benefit significantly from coordinated robot teams that can cover large areas efficiently while sharing computational resources and task responsibilities. The agricultural sector's adoption of smart farming technologies continues to drive demand for sophisticated multi-robot coordination capabilities.
Defense and security applications constitute a specialized but significant market segment requiring robust multi-robot collaboration for surveillance, reconnaissance, and tactical operations. These applications demand highly reliable load-sharing mechanisms to ensure mission continuity and operational effectiveness in challenging environments.
Current State and Challenges in Multi-Robot Load Distribution
Multi-robot load distribution has emerged as a critical research domain driven by the increasing deployment of robotic systems in industrial automation, logistics, and service applications. Current implementations predominantly rely on centralized coordination architectures, where a master controller allocates tasks and monitors system performance. However, these centralized approaches face significant scalability limitations as the number of robots increases, creating communication bottlenecks and single points of failure that compromise system reliability.
The state-of-the-art load-sharing mechanisms primarily utilize auction-based algorithms, consensus protocols, and market-based approaches. Auction-based systems allow robots to bid for tasks based on their current capacity and proximity to work locations, while consensus protocols ensure distributed agreement on task allocation decisions. Market-based mechanisms introduce economic principles where robots compete for tasks through virtual currency systems, theoretically optimizing global system efficiency.
Despite these advances, several fundamental challenges persist in achieving effective load distribution. Communication latency and bandwidth constraints significantly impact real-time coordination, particularly in large-scale deployments where robots must continuously exchange status information and task updates. Network partitioning scenarios, where subgroups of robots lose connectivity with the main system, create additional complexity requiring robust fault-tolerance mechanisms.
Dynamic load balancing presents another major challenge, as traditional static allocation methods fail to adapt to changing operational conditions. Robots may experience varying performance degradation, unexpected failures, or encounter obstacles that alter their task completion capabilities. Current systems struggle to redistribute workloads efficiently in response to these dynamic changes, often resulting in suboptimal resource utilization.
Heterogeneous robot capabilities further complicate load distribution strategies. Multi-robot systems frequently comprise robots with different physical attributes, sensor configurations, and processing capabilities. Existing algorithms often oversimplify these differences, leading to inefficient task assignments that fail to leverage each robot's unique strengths while compensating for their limitations.
The computational overhead associated with distributed decision-making algorithms represents a significant technical barrier. Complex optimization problems required for optimal load distribution often exceed the processing capabilities of individual robots, forcing systems to rely on simplified heuristics that may not achieve globally optimal solutions. This computational constraint becomes more pronounced as system complexity and the number of variables increase.
The state-of-the-art load-sharing mechanisms primarily utilize auction-based algorithms, consensus protocols, and market-based approaches. Auction-based systems allow robots to bid for tasks based on their current capacity and proximity to work locations, while consensus protocols ensure distributed agreement on task allocation decisions. Market-based mechanisms introduce economic principles where robots compete for tasks through virtual currency systems, theoretically optimizing global system efficiency.
Despite these advances, several fundamental challenges persist in achieving effective load distribution. Communication latency and bandwidth constraints significantly impact real-time coordination, particularly in large-scale deployments where robots must continuously exchange status information and task updates. Network partitioning scenarios, where subgroups of robots lose connectivity with the main system, create additional complexity requiring robust fault-tolerance mechanisms.
Dynamic load balancing presents another major challenge, as traditional static allocation methods fail to adapt to changing operational conditions. Robots may experience varying performance degradation, unexpected failures, or encounter obstacles that alter their task completion capabilities. Current systems struggle to redistribute workloads efficiently in response to these dynamic changes, often resulting in suboptimal resource utilization.
Heterogeneous robot capabilities further complicate load distribution strategies. Multi-robot systems frequently comprise robots with different physical attributes, sensor configurations, and processing capabilities. Existing algorithms often oversimplify these differences, leading to inefficient task assignments that fail to leverage each robot's unique strengths while compensating for their limitations.
The computational overhead associated with distributed decision-making algorithms represents a significant technical barrier. Complex optimization problems required for optimal load distribution often exceed the processing capabilities of individual robots, forcing systems to rely on simplified heuristics that may not achieve globally optimal solutions. This computational constraint becomes more pronounced as system complexity and the number of variables increase.
Existing Load-Sharing Algorithms and Protocols
01 Distributed task allocation and coordination mechanisms
Multi-robot systems can implement distributed algorithms for task allocation where robots autonomously negotiate and distribute workload among themselves. This approach uses coordination mechanisms that allow robots to communicate their capabilities, current load status, and availability to efficiently distribute tasks without centralized control. The system enables dynamic reallocation of tasks based on real-time conditions and robot performance.- Distributed task allocation and coordination mechanisms: Multi-robot systems can implement distributed algorithms for task allocation where robots autonomously negotiate and distribute workload among themselves. This approach uses coordination mechanisms that allow robots to communicate their capabilities, current load status, and availability to achieve balanced load distribution. The systems employ consensus protocols and distributed decision-making frameworks to ensure efficient task sharing without centralized control.
- Dynamic load balancing through real-time monitoring: Load-sharing systems incorporate real-time monitoring capabilities to track the operational status and workload of each robot in the system. Dynamic load balancing algorithms continuously assess robot performance metrics and redistribute tasks based on current capacity, battery levels, and processing capabilities. This adaptive approach ensures optimal resource utilization and prevents individual robots from becoming overloaded while others remain underutilized.
- Hierarchical control architecture for workload distribution: Multi-robot systems employ hierarchical control structures where higher-level controllers manage overall task distribution while lower-level controllers handle individual robot operations. This architecture enables efficient decomposition of complex tasks into subtasks that can be distributed among multiple robots. The hierarchical approach facilitates scalability and allows for both centralized planning and decentralized execution of load-sharing strategies.
- Communication protocols for collaborative load management: Effective load-sharing requires robust communication protocols that enable robots to exchange information about task status, resource availability, and system constraints. These protocols support both direct robot-to-robot communication and network-based coordination, allowing robots to share workload information and coordinate their actions. The communication infrastructure ensures reliable data transmission and synchronization among distributed robotic agents.
- Optimization algorithms for equitable task distribution: Multi-robot load-sharing systems utilize optimization algorithms to achieve equitable distribution of tasks based on various criteria such as completion time, energy consumption, and robot capabilities. These algorithms consider multiple constraints and objectives to generate optimal or near-optimal task assignments. The optimization approaches include mathematical programming, heuristic methods, and machine learning techniques that adapt to changing system conditions and requirements.
02 Centralized load balancing and task scheduling
A centralized control system monitors the status and workload of all robots in the system and distributes tasks based on optimization algorithms. The central controller evaluates factors such as robot capabilities, current assignments, energy levels, and proximity to task locations to achieve optimal load distribution. This approach ensures balanced workload distribution and prevents individual robots from being overloaded while others remain idle.Expand Specific Solutions03 Dynamic load redistribution based on robot capabilities and status
The system continuously monitors individual robot performance metrics including battery levels, processing capacity, and mechanical condition to dynamically adjust task assignments. When a robot experiences reduced capability or approaches capacity limits, the system automatically redistributes portions of its workload to other available robots. This adaptive approach maintains system efficiency and prevents failures due to overloading individual units.Expand Specific Solutions04 Communication protocols for workload information sharing
Specialized communication protocols enable robots to share real-time information about their current workload, task progress, and available capacity with other robots in the system. These protocols facilitate efficient data exchange regarding task requirements, completion status, and resource availability. The communication framework supports both peer-to-peer and broadcast modes to ensure all robots maintain updated information for effective load sharing decisions.Expand Specific Solutions05 Optimization algorithms for balanced workload distribution
Advanced optimization algorithms calculate optimal task distribution patterns considering multiple constraints such as task priorities, robot capabilities, energy consumption, and completion deadlines. These algorithms employ mathematical models and heuristic approaches to minimize overall system load variance and maximize throughput. The optimization process accounts for both current system state and predicted future demands to achieve sustained load balance across the robot fleet.Expand Specific Solutions
Key Players in Multi-Robot Systems Industry
The multi-robot load-sharing technology landscape is in a rapidly evolving growth phase, driven by increasing industrial automation demands and expanding market opportunities across manufacturing, logistics, and autonomous systems. The market demonstrates significant scale potential, particularly in Asia-Pacific regions where major research institutions like Tsinghua University, Harbin Engineering University, and Huazhong University of Science & Technology are advancing foundational algorithms. Technology maturity varies considerably across players: established industrial giants like ABB Ltd., Siemens AG, FANUC Corp., and Kawasaki Heavy Industries have mature hardware platforms but are integrating advanced coordination algorithms, while specialized robotics companies such as Realtime Robotics, Rapyuta Robotics, and Intrinsic Innovation LLC are developing cutting-edge software solutions for real-time multi-robot coordination. Cloud-based approaches from companies like X Development LLC and Naver Labs Corp. represent emerging technological paradigms, indicating the field is transitioning from traditional centralized control to distributed, AI-driven load-sharing architectures.
Realtime Robotics, Inc.
Technical Solution: Realtime Robotics specializes in real-time motion planning solutions that enable effective load-sharing in multi-robot systems through their proprietary hardware-accelerated path planning technology. Their approach utilizes specialized processors to compute collision-free trajectories for multiple robots simultaneously, enabling coordinated load handling and task execution. The system provides microsecond-level response times for dynamic replanning, allowing robot teams to adapt quickly to changing load requirements and environmental conditions while maintaining safe and efficient operations.
Strengths: Ultra-low latency motion planning capabilities and specialized hardware optimization for real-time performance. Weaknesses: Relatively new company with limited market presence and narrow focus on motion planning aspects of load-sharing.
FANUC Corp.
Technical Solution: FANUC's multi-robot load-sharing solution leverages their proprietary robot control systems with advanced motion planning algorithms. The technology enables seamless coordination between multiple industrial robots through centralized task scheduling and distributed execution mechanisms. Their approach incorporates real-time load monitoring and adaptive control strategies that automatically balance workloads across robot teams, particularly effective in manufacturing assembly lines and material handling applications where precise coordination is critical.
Strengths: Market-leading position in industrial robotics with robust and reliable control systems. Weaknesses: Limited flexibility for non-industrial applications and dependency on proprietary hardware platforms.
Core Innovations in Distributed Load Balancing
Multi-humanoid robot distributed collaborative carrying method based on model predictive control
PatentPendingCN119847023A
Innovation
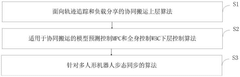
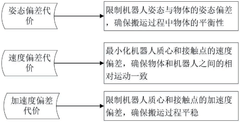
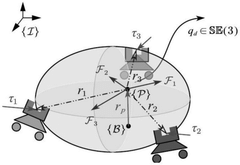
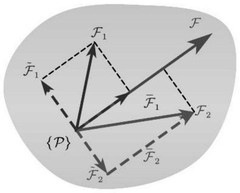
- A multi-human robot distributed load sharing collaborative handling control method is adopted based on model predictive control (MPC), including upper-level collaborative handling algorithm, lower-level MPC and full-body control (WBC) algorithm, and multi-human robot gait synchronization algorithm. Active load sharing and gait synchronization are achieved through distributed communication networks and distributed consistency terms.
System and Method for Load Balancing of Robots
PatentActiveUS20170252926A1
Innovation
- A system and method for load balancing of robots, where task servers manage spatial regions, receive tasks, and assign them to robots within their region or transfer tasks to other servers if the task cannot be efficiently performed locally, using spatial data structures and minimum bounding boxes to optimize task assignment and balance loads across servers.




Safety Standards for Multi-Robot Operations
Safety standards for multi-robot operations represent a critical framework that directly impacts the effectiveness of load-sharing implementations in multi-robot systems. These standards establish the foundational requirements for safe coordination, communication protocols, and operational boundaries that enable multiple robots to work collaboratively while distributing computational and physical workloads efficiently.
The International Organization for Standardization (ISO) has developed several relevant standards, including ISO 10218 for industrial robot safety and ISO 13482 for personal care robots. These standards emphasize risk assessment methodologies, safety-rated monitoring systems, and fail-safe mechanisms that are essential when robots share processing loads and coordinate tasks. Additionally, the ANSI/RIA R15.06 standard provides comprehensive guidelines for industrial robot systems, addressing collaborative workspace requirements and safety control architectures.
Functional safety standards such as IEC 61508 and ISO 26262 establish Safety Integrity Levels (SIL) that define reliability requirements for safety-critical systems. In load-sharing scenarios, these standards mandate redundant communication channels, distributed fault detection mechanisms, and graceful degradation protocols. The standards require that when one robot in a multi-robot system fails, the remaining units can safely redistribute the workload without compromising overall system safety.
Communication safety protocols form another crucial aspect, with standards like IEEE 802.11 and industrial Ethernet protocols defining secure, real-time data exchange requirements. These protocols ensure that load distribution commands, status updates, and emergency signals are transmitted reliably between robots, preventing coordination failures that could lead to safety hazards.
Emerging standards specifically address multi-robot coordination safety, including draft ISO standards for autonomous systems and swarm robotics. These developing frameworks focus on collective behavior safety, distributed decision-making protocols, and dynamic load balancing under safety constraints. They establish requirements for real-time monitoring of system-wide performance metrics and automatic load redistribution when safety thresholds are approached.
Compliance with these safety standards is increasingly becoming mandatory for commercial multi-robot deployments, particularly in manufacturing, logistics, and service industries. Organizations must demonstrate adherence to relevant safety standards through rigorous testing, documentation, and certification processes before implementing load-sharing multi-robot systems in operational environments.
The International Organization for Standardization (ISO) has developed several relevant standards, including ISO 10218 for industrial robot safety and ISO 13482 for personal care robots. These standards emphasize risk assessment methodologies, safety-rated monitoring systems, and fail-safe mechanisms that are essential when robots share processing loads and coordinate tasks. Additionally, the ANSI/RIA R15.06 standard provides comprehensive guidelines for industrial robot systems, addressing collaborative workspace requirements and safety control architectures.
Functional safety standards such as IEC 61508 and ISO 26262 establish Safety Integrity Levels (SIL) that define reliability requirements for safety-critical systems. In load-sharing scenarios, these standards mandate redundant communication channels, distributed fault detection mechanisms, and graceful degradation protocols. The standards require that when one robot in a multi-robot system fails, the remaining units can safely redistribute the workload without compromising overall system safety.
Communication safety protocols form another crucial aspect, with standards like IEEE 802.11 and industrial Ethernet protocols defining secure, real-time data exchange requirements. These protocols ensure that load distribution commands, status updates, and emergency signals are transmitted reliably between robots, preventing coordination failures that could lead to safety hazards.
Emerging standards specifically address multi-robot coordination safety, including draft ISO standards for autonomous systems and swarm robotics. These developing frameworks focus on collective behavior safety, distributed decision-making protocols, and dynamic load balancing under safety constraints. They establish requirements for real-time monitoring of system-wide performance metrics and automatic load redistribution when safety thresholds are approached.
Compliance with these safety standards is increasingly becoming mandatory for commercial multi-robot deployments, particularly in manufacturing, logistics, and service industries. Organizations must demonstrate adherence to relevant safety standards through rigorous testing, documentation, and certification processes before implementing load-sharing multi-robot systems in operational environments.
Communication Infrastructure Requirements
The communication infrastructure serves as the backbone for effective load-sharing in multi-robot systems, enabling real-time coordination and dynamic task allocation among distributed robotic agents. A robust communication framework must support both centralized and decentralized architectures, allowing systems to adapt based on operational requirements and environmental constraints.
Network topology considerations are fundamental to infrastructure design. Mesh networks provide redundancy and fault tolerance, ensuring continued operation even when individual communication links fail. Star topologies offer centralized control benefits but create single points of failure. Hybrid approaches combining both topologies can optimize performance while maintaining system resilience. The choice of topology directly impacts load distribution efficiency and system scalability.
Bandwidth requirements vary significantly based on the type and frequency of data exchange. Basic coordination tasks may require minimal bandwidth for position updates and status messages, typically ranging from 1-10 kbps per robot. However, systems involving real-time sensor data sharing, video streams, or complex environmental mapping may demand bandwidth exceeding 1 Mbps per agent. Dynamic bandwidth allocation mechanisms become crucial when communication resources are limited.
Latency constraints are critical for time-sensitive load-sharing operations. Hard real-time systems require deterministic communication delays, typically under 10 milliseconds for safety-critical applications. Soft real-time systems can tolerate higher latencies but must maintain consistent performance to prevent load imbalances. Network protocols must prioritize critical messages while ensuring fair access to communication resources.
Protocol selection significantly influences system performance and reliability. IEEE 802.11 variants provide high bandwidth but may suffer from interference and range limitations. Cellular networks offer wide coverage but introduce variable latencies and potential service interruptions. Dedicated radio frequencies ensure reliable communication but require spectrum licensing and specialized hardware. Multi-protocol approaches can leverage the strengths of different communication technologies.
Quality of Service mechanisms ensure reliable message delivery and prevent communication bottlenecks that could disrupt load distribution. Priority queuing systems can differentiate between critical coordination messages and routine status updates. Error correction and retransmission protocols maintain data integrity while adaptive transmission power management optimizes energy consumption and reduces interference between robots operating in close proximity.
Network topology considerations are fundamental to infrastructure design. Mesh networks provide redundancy and fault tolerance, ensuring continued operation even when individual communication links fail. Star topologies offer centralized control benefits but create single points of failure. Hybrid approaches combining both topologies can optimize performance while maintaining system resilience. The choice of topology directly impacts load distribution efficiency and system scalability.
Bandwidth requirements vary significantly based on the type and frequency of data exchange. Basic coordination tasks may require minimal bandwidth for position updates and status messages, typically ranging from 1-10 kbps per robot. However, systems involving real-time sensor data sharing, video streams, or complex environmental mapping may demand bandwidth exceeding 1 Mbps per agent. Dynamic bandwidth allocation mechanisms become crucial when communication resources are limited.
Latency constraints are critical for time-sensitive load-sharing operations. Hard real-time systems require deterministic communication delays, typically under 10 milliseconds for safety-critical applications. Soft real-time systems can tolerate higher latencies but must maintain consistent performance to prevent load imbalances. Network protocols must prioritize critical messages while ensuring fair access to communication resources.
Protocol selection significantly influences system performance and reliability. IEEE 802.11 variants provide high bandwidth but may suffer from interference and range limitations. Cellular networks offer wide coverage but introduce variable latencies and potential service interruptions. Dedicated radio frequencies ensure reliable communication but require spectrum licensing and specialized hardware. Multi-protocol approaches can leverage the strengths of different communication technologies.
Quality of Service mechanisms ensure reliable message delivery and prevent communication bottlenecks that could disrupt load distribution. Priority queuing systems can differentiate between critical coordination messages and routine status updates. Error correction and retransmission protocols maintain data integrity while adaptive transmission power management optimizes energy consumption and reduces interference between robots operating in close proximity.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!