

How to Compensate Force Control Friction Using LuGre Parameters
MAY 8, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Force Control Friction Compensation Background and Objectives
Force control systems have emerged as critical components in modern robotics and automation applications, where precise interaction between mechanical systems and their environments is paramount. The fundamental challenge in achieving accurate force control lies in the inherent presence of friction within mechanical joints and actuators, which introduces nonlinear disturbances that significantly degrade control performance. Traditional linear friction models have proven inadequate for capturing the complex dynamics of real-world friction phenomena, leading to persistent tracking errors, limit cycles, and reduced system stability.
The LuGre friction model represents a significant advancement in friction modeling, offering a comprehensive mathematical framework that captures both static and dynamic friction characteristics. Unlike simplified Coulomb or viscous friction models, the LuGre model incorporates the Stribeck effect, pre-sliding displacement, and varying breakaway forces through a bristle-based conceptual approach. This model utilizes several key parameters including static friction coefficient, Coulomb friction coefficient, viscous friction coefficient, Stribeck velocity, and bristle stiffness, which collectively enable accurate representation of friction behavior across different operating conditions.
The evolution of force control friction compensation has progressed through several distinct phases, beginning with basic feedforward compensation techniques in the 1980s and advancing toward sophisticated adaptive and learning-based approaches. Early implementations relied on lookup tables and simple mathematical models, while contemporary systems leverage real-time parameter identification and machine learning algorithms. The integration of LuGre parameters into force control systems represents the current state-of-the-art, enabling more precise compensation strategies that adapt to changing operating conditions and component wear.
The primary objective of implementing LuGre parameter-based friction compensation is to achieve superior force tracking accuracy while maintaining system stability across diverse operating scenarios. This involves developing robust parameter identification algorithms that can estimate LuGre model parameters in real-time, designing compensation controllers that effectively utilize these parameters, and ensuring seamless integration with existing force control architectures. Additionally, the approach aims to reduce steady-state errors, eliminate stick-slip phenomena, and improve overall system responsiveness in applications ranging from robotic manipulation to precision manufacturing processes.
The LuGre friction model represents a significant advancement in friction modeling, offering a comprehensive mathematical framework that captures both static and dynamic friction characteristics. Unlike simplified Coulomb or viscous friction models, the LuGre model incorporates the Stribeck effect, pre-sliding displacement, and varying breakaway forces through a bristle-based conceptual approach. This model utilizes several key parameters including static friction coefficient, Coulomb friction coefficient, viscous friction coefficient, Stribeck velocity, and bristle stiffness, which collectively enable accurate representation of friction behavior across different operating conditions.
The evolution of force control friction compensation has progressed through several distinct phases, beginning with basic feedforward compensation techniques in the 1980s and advancing toward sophisticated adaptive and learning-based approaches. Early implementations relied on lookup tables and simple mathematical models, while contemporary systems leverage real-time parameter identification and machine learning algorithms. The integration of LuGre parameters into force control systems represents the current state-of-the-art, enabling more precise compensation strategies that adapt to changing operating conditions and component wear.
The primary objective of implementing LuGre parameter-based friction compensation is to achieve superior force tracking accuracy while maintaining system stability across diverse operating scenarios. This involves developing robust parameter identification algorithms that can estimate LuGre model parameters in real-time, designing compensation controllers that effectively utilize these parameters, and ensuring seamless integration with existing force control architectures. Additionally, the approach aims to reduce steady-state errors, eliminate stick-slip phenomena, and improve overall system responsiveness in applications ranging from robotic manipulation to precision manufacturing processes.
Market Demand for Precise Force Control Systems
The global market for precise force control systems has experienced substantial growth driven by increasing automation demands across multiple industrial sectors. Manufacturing industries, particularly automotive, aerospace, and electronics assembly, require sophisticated force control mechanisms to ensure product quality and operational efficiency. These applications demand friction compensation capabilities that can maintain consistent performance across varying operational conditions.
Robotic applications represent a significant market segment where precise force control systems are essential. Industrial robots performing assembly tasks, material handling, and precision machining operations require advanced friction compensation algorithms to achieve repeatable positioning accuracy. The integration of LuGre parameter-based friction compensation has become increasingly valuable in applications where traditional control methods fail to address complex friction behaviors.
Medical device manufacturing and surgical robotics constitute rapidly expanding market segments demanding exceptional force control precision. These applications require systems capable of handling delicate materials and performing intricate procedures where friction variations can significantly impact outcomes. The ability to compensate for friction using advanced mathematical models like LuGre parameters provides competitive advantages in these high-stakes environments.
Aerospace and defense industries drive demand for force control systems capable of operating under extreme conditions. Aircraft control surfaces, satellite positioning mechanisms, and precision instrumentation require friction compensation solutions that maintain accuracy despite temperature variations, mechanical wear, and environmental factors. LuGre parameter-based compensation offers superior performance in these challenging applications compared to conventional approaches.
The semiconductor manufacturing sector presents unique requirements for ultra-precise force control systems. Wafer handling, chip placement, and testing equipment demand nanometer-level positioning accuracy where even minimal friction variations can cause defects. Advanced friction compensation using LuGre parameters enables manufacturers to achieve the precision necessary for next-generation semiconductor production processes.
Emerging applications in renewable energy systems, particularly wind turbine control and solar tracking mechanisms, create additional market opportunities. These systems require force control solutions that can adapt to changing environmental conditions while maintaining optimal performance over extended operational periods. The predictive capabilities of LuGre parameter-based friction compensation align well with these long-term reliability requirements.
Robotic applications represent a significant market segment where precise force control systems are essential. Industrial robots performing assembly tasks, material handling, and precision machining operations require advanced friction compensation algorithms to achieve repeatable positioning accuracy. The integration of LuGre parameter-based friction compensation has become increasingly valuable in applications where traditional control methods fail to address complex friction behaviors.
Medical device manufacturing and surgical robotics constitute rapidly expanding market segments demanding exceptional force control precision. These applications require systems capable of handling delicate materials and performing intricate procedures where friction variations can significantly impact outcomes. The ability to compensate for friction using advanced mathematical models like LuGre parameters provides competitive advantages in these high-stakes environments.
Aerospace and defense industries drive demand for force control systems capable of operating under extreme conditions. Aircraft control surfaces, satellite positioning mechanisms, and precision instrumentation require friction compensation solutions that maintain accuracy despite temperature variations, mechanical wear, and environmental factors. LuGre parameter-based compensation offers superior performance in these challenging applications compared to conventional approaches.
The semiconductor manufacturing sector presents unique requirements for ultra-precise force control systems. Wafer handling, chip placement, and testing equipment demand nanometer-level positioning accuracy where even minimal friction variations can cause defects. Advanced friction compensation using LuGre parameters enables manufacturers to achieve the precision necessary for next-generation semiconductor production processes.
Emerging applications in renewable energy systems, particularly wind turbine control and solar tracking mechanisms, create additional market opportunities. These systems require force control solutions that can adapt to changing environmental conditions while maintaining optimal performance over extended operational periods. The predictive capabilities of LuGre parameter-based friction compensation align well with these long-term reliability requirements.
Current State and Challenges in Friction Compensation
Friction compensation in force control systems remains a significant challenge in modern robotics and automation applications. Current approaches predominantly rely on classical friction models such as Coulomb, viscous, and Stribeck models, which often fail to capture the complex dynamic behaviors observed in real-world scenarios. These traditional models inadequately represent phenomena like pre-sliding displacement, stick-slip transitions, and varying breakaway forces that occur during different operational conditions.
The LuGre friction model has emerged as a more sophisticated approach, incorporating bristle-based dynamics to better represent friction characteristics. However, implementing LuGre parameters for effective friction compensation presents substantial technical hurdles. Parameter identification remains one of the most critical challenges, as the model requires accurate estimation of seven distinct parameters including bristle stiffness, damping coefficients, and Stribeck velocity. These parameters are highly sensitive to environmental conditions, surface properties, and mechanical wear, making robust identification extremely difficult.
Current parameter estimation techniques face significant limitations in practical applications. Online identification methods struggle with computational complexity and convergence issues, particularly during transient operations where friction behavior is most critical. Offline identification approaches, while more accurate, cannot adapt to changing system conditions and require extensive experimental procedures that may not be feasible in industrial settings.
Real-time implementation challenges further complicate friction compensation efforts. The LuGre model's computational requirements often exceed the processing capabilities of embedded control systems, forcing engineers to use simplified approximations that compromise accuracy. Additionally, sensor noise and measurement uncertainties significantly impact parameter estimation quality, leading to suboptimal compensation performance.
Stability concerns represent another major obstacle in LuGre-based friction compensation. The nonlinear nature of the model can introduce instabilities in closed-loop force control systems, particularly when combined with other nonlinearities present in robotic manipulators. Ensuring robust stability margins while maintaining high compensation accuracy requires sophisticated control design approaches that are not yet fully matured.
Geographic distribution of research efforts shows concentrated development in advanced manufacturing regions, with significant contributions from European research institutions focusing on precision machining applications, while Asian research centers emphasize semiconductor and electronics manufacturing requirements. North American efforts primarily target aerospace and defense applications where high-precision force control is critical.
The LuGre friction model has emerged as a more sophisticated approach, incorporating bristle-based dynamics to better represent friction characteristics. However, implementing LuGre parameters for effective friction compensation presents substantial technical hurdles. Parameter identification remains one of the most critical challenges, as the model requires accurate estimation of seven distinct parameters including bristle stiffness, damping coefficients, and Stribeck velocity. These parameters are highly sensitive to environmental conditions, surface properties, and mechanical wear, making robust identification extremely difficult.
Current parameter estimation techniques face significant limitations in practical applications. Online identification methods struggle with computational complexity and convergence issues, particularly during transient operations where friction behavior is most critical. Offline identification approaches, while more accurate, cannot adapt to changing system conditions and require extensive experimental procedures that may not be feasible in industrial settings.
Real-time implementation challenges further complicate friction compensation efforts. The LuGre model's computational requirements often exceed the processing capabilities of embedded control systems, forcing engineers to use simplified approximations that compromise accuracy. Additionally, sensor noise and measurement uncertainties significantly impact parameter estimation quality, leading to suboptimal compensation performance.
Stability concerns represent another major obstacle in LuGre-based friction compensation. The nonlinear nature of the model can introduce instabilities in closed-loop force control systems, particularly when combined with other nonlinearities present in robotic manipulators. Ensuring robust stability margins while maintaining high compensation accuracy requires sophisticated control design approaches that are not yet fully matured.
Geographic distribution of research efforts shows concentrated development in advanced manufacturing regions, with significant contributions from European research institutions focusing on precision machining applications, while Asian research centers emphasize semiconductor and electronics manufacturing requirements. North American efforts primarily target aerospace and defense applications where high-precision force control is critical.
Existing LuGre-Based Friction Compensation Solutions
01 LuGre friction model parameter identification methods
Various techniques and algorithms are developed for identifying and estimating the parameters of the LuGre friction model. These methods include adaptive identification algorithms, recursive estimation techniques, and optimization-based approaches that can accurately determine the friction model parameters from experimental data or system responses.- LuGre friction model parameter identification methods: Various techniques and algorithms are developed for identifying and estimating the parameters of the LuGre friction model. These methods involve mathematical approaches, optimization algorithms, and experimental procedures to determine the static friction coefficient, Coulomb friction coefficient, Stribeck velocity, and other key parameters that characterize the friction behavior in mechanical systems.
- Adaptive control systems using LuGre friction compensation: Control systems that incorporate adaptive mechanisms to compensate for friction effects using the LuGre model. These systems can automatically adjust control parameters based on real-time friction estimation, improving system performance and reducing the impact of friction-induced disturbances in servo systems, robotic applications, and precision positioning devices.
- Observer-based friction state estimation: Implementation of state observers and estimation techniques to monitor and predict friction states in dynamic systems. These approaches use mathematical observers to estimate unmeasurable friction states and parameters, enabling better control performance and system monitoring in applications where direct friction measurement is not feasible.
- Friction modeling for servo motor and actuator systems: Application of LuGre friction models specifically in servo motor drives, actuators, and motion control systems. These implementations focus on improving positioning accuracy, reducing stick-slip phenomena, and enhancing overall system performance by incorporating detailed friction characteristics into the control algorithms and system design.
- Nonlinear friction compensation and control strategies: Advanced control methodologies that address nonlinear friction effects using LuGre model parameters. These strategies include robust control techniques, sliding mode control, and other nonlinear control approaches designed to handle the complex dynamics introduced by friction in mechanical systems, particularly in high-precision applications.
02 Control systems incorporating LuGre friction compensation
Advanced control strategies that integrate LuGre friction model parameters for improved system performance. These control systems utilize the identified friction parameters to implement compensation mechanisms, reducing the negative effects of friction in mechanical systems and enhancing positioning accuracy and tracking performance.Expand Specific Solutions03 Dynamic friction modeling and simulation techniques
Computational methods and simulation frameworks for modeling dynamic friction behavior using LuGre parameters. These techniques enable accurate prediction of friction forces under various operating conditions and facilitate the design and optimization of mechanical systems with complex friction characteristics.Expand Specific Solutions04 Mechanical system applications with LuGre friction models
Implementation of LuGre friction parameter models in specific mechanical systems and industrial applications. These applications demonstrate the practical use of friction modeling in real-world scenarios, including robotics, manufacturing equipment, and precision positioning systems where accurate friction characterization is critical.Expand Specific Solutions05 Adaptive and real-time friction parameter estimation
Real-time estimation and adaptive adjustment techniques for LuGre friction model parameters during system operation. These methods enable continuous monitoring and updating of friction parameters to account for changing operating conditions, wear, and environmental factors that affect friction behavior in dynamic systems.Expand Specific Solutions
Key Players in Force Control and Friction Compensation
The force control friction compensation using LuGre parameters represents a mature research domain within the broader robotics and automation industry, which is experiencing rapid growth driven by increasing demand for precision manufacturing and autonomous systems. The market demonstrates significant expansion potential, particularly in automotive, aerospace, and industrial automation sectors, with global robotics market valuations reaching hundreds of billions annually. Technology maturity varies considerably across market participants, with established industrial leaders like JTEKT Europe SAS and Safran Electronics & Defense SAS possessing advanced friction modeling capabilities, while automation specialists such as Estun Automation Co., Ltd. and HIWIN Technologies Corp. focus on practical implementation in servo systems. Academic institutions including Beijing Institute of Technology, Harbin Institute of Technology, and Zhejiang University contribute fundamental research in LuGre parameter identification and adaptive control algorithms, bridging theoretical advances with industrial applications through collaborations with companies like China FAW Co., Ltd. and various robotics manufacturers.
JTEKT Europe SAS
Technical Solution: JTEKT develops advanced friction compensation systems for electric power steering (EPS) applications using LuGre model parameters. Their approach integrates real-time parameter identification algorithms that continuously estimate static friction coefficient, Coulomb friction, and viscous damping parameters during vehicle operation. The system employs adaptive control strategies that adjust compensation gains based on driving conditions, steering velocity, and temperature variations. Their implementation includes pre-compensation feedforward control combined with feedback correction to minimize stick-slip phenomena and improve steering feel consistency across different operating scenarios.
Strengths: Extensive automotive industry experience and proven EPS systems integration capabilities. Weaknesses: Limited to automotive applications with less flexibility for general industrial robotics applications.
Safran Electronics & Defense SAS
Technical Solution: Safran implements LuGre-based friction compensation in aerospace actuator systems, particularly for flight control surfaces and landing gear mechanisms. Their solution utilizes high-precision parameter estimation techniques that account for temperature-dependent friction characteristics and wear effects over extended operational periods. The system incorporates robust adaptive algorithms that maintain compensation accuracy despite parameter drift and environmental variations. Their approach includes comprehensive validation protocols for safety-critical applications, ensuring reliable performance under extreme operating conditions including high altitude, temperature variations, and vibration environments.
Strengths: Expertise in safety-critical aerospace applications with rigorous validation standards and environmental robustness. Weaknesses: High complexity and cost structure may limit applicability to commercial industrial systems.
Core LuGre Parameter Identification and Implementation
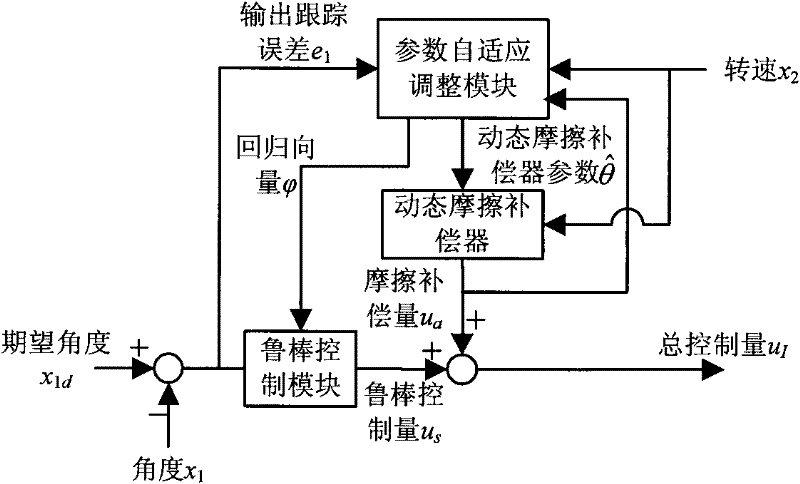
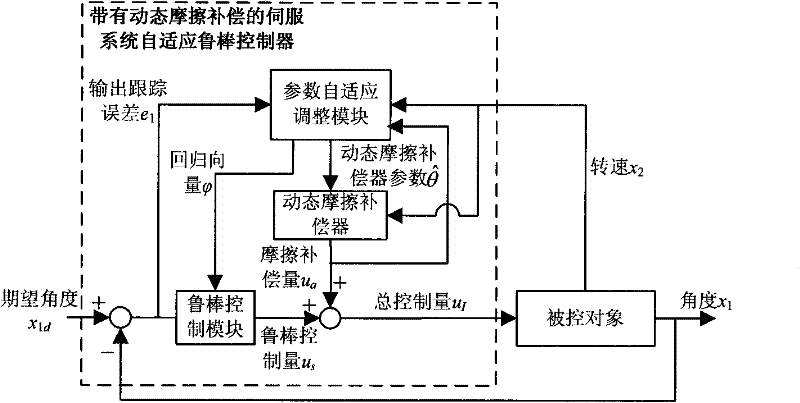
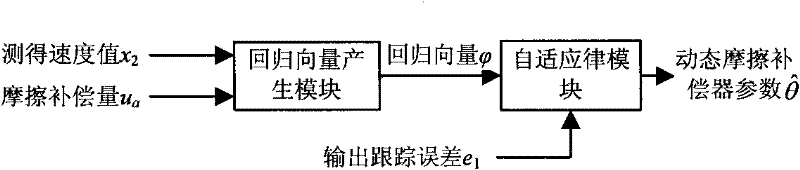
Servo system self-adaptive robust controller with dynamic frictional compensation
PatentActiveCN101846975B
Innovation
- An adaptive robust controller based on the LuGre dynamic friction model is adopted. Through the parameter adaptive adjustment module and dynamic friction compensator, combined with the robust control module, it achieves precise compensation of friction and disturbance suppression, ensuring the closed-loop stability and response of the system. performance.

Servo manipulator friction compensation control system based on LuGre friction model and method
PatentActiveCN105045103A
Innovation
- The servo manipulator friction compensation control system based on the LuGre friction model is used to approximate the friction uncertainty through the RBF neural network operator, and combined with the computational torque controller, the friction is learned and approximated through the neural network to perform dynamic compensation and improve Control accuracy.




Safety Standards for Force Control Applications
Safety standards for force control applications utilizing LuGre friction compensation represent a critical framework ensuring operational reliability and personnel protection. These standards encompass multiple regulatory domains, including ISO 10218 for industrial robots, IEC 61508 for functional safety, and ANSI/RIA R15.06 for robotic system safety requirements. The integration of LuGre friction models into force control systems necessitates adherence to stringent safety protocols due to the inherent complexity of dynamic friction compensation algorithms.
Force control systems implementing LuGre parameter-based friction compensation must comply with Safety Integrity Level (SIL) requirements, typically ranging from SIL 2 to SIL 4 depending on application criticality. The probabilistic failure rate calculations must account for parameter estimation uncertainties and model accuracy limitations. Safety-critical applications require redundant sensing mechanisms and fail-safe operational modes when friction compensation algorithms encounter parameter drift or estimation errors.
Certification processes mandate comprehensive validation testing protocols that verify system behavior under various friction conditions and parameter variations. These tests must demonstrate stable force control performance across the entire operational envelope, including scenarios where LuGre parameters deviate from nominal values due to wear, contamination, or environmental changes. Documentation requirements include detailed hazard analysis, risk assessment matrices, and validation test reports demonstrating compliance with applicable safety standards.
Emergency stop functionality and force limiting mechanisms represent mandatory safety features that must remain operational independent of friction compensation algorithms. The safety architecture requires hardware-based force monitoring systems capable of detecting excessive forces within specified response times, typically under 500 milliseconds for collaborative applications. These systems must function reliably even when LuGre parameter estimation algorithms experience computational delays or convergence issues.
Regular safety audits and parameter validation procedures ensure continued compliance throughout the system lifecycle. Maintenance protocols must include periodic verification of friction model accuracy and safety system functionality, with documented procedures for parameter recalibration and safety system testing to maintain certification validity.
Force control systems implementing LuGre parameter-based friction compensation must comply with Safety Integrity Level (SIL) requirements, typically ranging from SIL 2 to SIL 4 depending on application criticality. The probabilistic failure rate calculations must account for parameter estimation uncertainties and model accuracy limitations. Safety-critical applications require redundant sensing mechanisms and fail-safe operational modes when friction compensation algorithms encounter parameter drift or estimation errors.
Certification processes mandate comprehensive validation testing protocols that verify system behavior under various friction conditions and parameter variations. These tests must demonstrate stable force control performance across the entire operational envelope, including scenarios where LuGre parameters deviate from nominal values due to wear, contamination, or environmental changes. Documentation requirements include detailed hazard analysis, risk assessment matrices, and validation test reports demonstrating compliance with applicable safety standards.
Emergency stop functionality and force limiting mechanisms represent mandatory safety features that must remain operational independent of friction compensation algorithms. The safety architecture requires hardware-based force monitoring systems capable of detecting excessive forces within specified response times, typically under 500 milliseconds for collaborative applications. These systems must function reliably even when LuGre parameter estimation algorithms experience computational delays or convergence issues.
Regular safety audits and parameter validation procedures ensure continued compliance throughout the system lifecycle. Maintenance protocols must include periodic verification of friction model accuracy and safety system functionality, with documented procedures for parameter recalibration and safety system testing to maintain certification validity.
Real-Time Implementation Challenges in Industrial Systems
Real-time implementation of LuGre friction compensation in industrial force control systems presents significant computational and practical challenges that must be addressed for successful deployment. The primary obstacle lies in the computational complexity of the LuGre model, which requires continuous calculation of internal friction states and nonlinear dynamics at high sampling frequencies typically demanded by industrial applications.
Processing power limitations become critical when implementing LuGre-based compensation algorithms on standard industrial controllers. The model's differential equations must be solved numerically in real-time, often requiring sampling rates exceeding 1 kHz for precise force control applications. This computational burden can overwhelm conventional programmable logic controllers (PLCs) and necessitates specialized hardware or optimized algorithmic approaches to maintain system responsiveness.
Parameter identification and adaptation present another substantial challenge in real-time environments. LuGre parameters such as static friction coefficients, Stribeck velocity, and bristle stiffness can vary significantly due to temperature changes, wear, lubrication conditions, and load variations during operation. Implementing online parameter estimation algorithms while maintaining stable control performance requires sophisticated adaptive mechanisms that can distinguish between parameter drift and external disturbances.
Sensor noise and measurement uncertainties significantly impact the effectiveness of LuGre friction compensation in industrial settings. The model's sensitivity to velocity measurements, particularly at low speeds where friction effects are most pronounced, can lead to chattering or instability when sensor signals contain noise. Filtering techniques must balance noise reduction with maintaining the bandwidth necessary for effective friction compensation.
Integration with existing industrial control architectures poses additional implementation challenges. Most industrial systems employ cascaded control structures with position, velocity, and current loops operating at different time scales. Incorporating LuGre friction compensation requires careful consideration of where to inject the compensation signal and how to maintain stability across all control loops while preserving the system's original performance characteristics.
Robustness and fail-safe operation requirements in industrial environments demand that LuGre compensation algorithms include comprehensive error handling and degradation strategies. The system must gracefully handle parameter estimation failures, sensor malfunctions, or computational overloads without compromising overall system safety or causing unexpected behavior that could damage equipment or endanger personnel.
Processing power limitations become critical when implementing LuGre-based compensation algorithms on standard industrial controllers. The model's differential equations must be solved numerically in real-time, often requiring sampling rates exceeding 1 kHz for precise force control applications. This computational burden can overwhelm conventional programmable logic controllers (PLCs) and necessitates specialized hardware or optimized algorithmic approaches to maintain system responsiveness.
Parameter identification and adaptation present another substantial challenge in real-time environments. LuGre parameters such as static friction coefficients, Stribeck velocity, and bristle stiffness can vary significantly due to temperature changes, wear, lubrication conditions, and load variations during operation. Implementing online parameter estimation algorithms while maintaining stable control performance requires sophisticated adaptive mechanisms that can distinguish between parameter drift and external disturbances.
Sensor noise and measurement uncertainties significantly impact the effectiveness of LuGre friction compensation in industrial settings. The model's sensitivity to velocity measurements, particularly at low speeds where friction effects are most pronounced, can lead to chattering or instability when sensor signals contain noise. Filtering techniques must balance noise reduction with maintaining the bandwidth necessary for effective friction compensation.
Integration with existing industrial control architectures poses additional implementation challenges. Most industrial systems employ cascaded control structures with position, velocity, and current loops operating at different time scales. Incorporating LuGre friction compensation requires careful consideration of where to inject the compensation signal and how to maintain stability across all control loops while preserving the system's original performance characteristics.
Robustness and fail-safe operation requirements in industrial environments demand that LuGre compensation algorithms include comprehensive error handling and degradation strategies. The system must gracefully handle parameter estimation failures, sensor malfunctions, or computational overloads without compromising overall system safety or causing unexpected behavior that could damage equipment or endanger personnel.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!