How to Utilize Soft Robotics for Hypersensitive Contact Applications
APR 14, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Soft Robotics Background and Hypersensitive Contact Goals
Soft robotics represents a paradigm shift from traditional rigid robotic systems, drawing inspiration from biological organisms that achieve remarkable functionality through compliant materials and structures. This interdisciplinary field emerged in the early 2000s, combining principles from materials science, mechanical engineering, and biology to create robots with inherent flexibility and adaptability. Unlike conventional robots built with rigid links and joints, soft robots utilize elastomeric materials, pneumatic actuators, and bio-inspired designs that enable safe interaction with delicate environments and objects.
The evolution of soft robotics has been driven by the limitations of traditional robotic systems in applications requiring gentle manipulation, adaptive grasping, and safe human-robot interaction. Early developments focused on pneumatic actuators and silicone-based materials, gradually expanding to include shape memory alloys, electroactive polymers, and advanced composite materials. The field has witnessed exponential growth over the past two decades, with significant contributions from research institutions worldwide and increasing commercial interest from industries ranging from healthcare to manufacturing.
Hypersensitive contact applications represent a critical frontier where soft robotics demonstrates exceptional potential. These applications encompass scenarios requiring extremely delicate touch sensitivity, precise force control, and adaptive contact mechanics. Medical procedures involving fragile tissues, handling of sensitive electronic components, archaeological artifact preservation, and interaction with vulnerable biological specimens exemplify the demanding requirements of hypersensitive contact scenarios.
The primary technical objectives for utilizing soft robotics in hypersensitive contact applications center on achieving unprecedented levels of tactile sensitivity while maintaining precise control and safety. Key goals include developing materials and actuators capable of detecting micro-scale forces and deformations, implementing real-time feedback systems that can process tactile information with minimal latency, and creating adaptive control algorithms that automatically adjust contact parameters based on environmental feedback.
Advanced sensing integration represents another crucial objective, requiring the seamless incorporation of distributed tactile sensors throughout soft robotic structures. These sensors must provide high-resolution spatial and temporal information about contact forces, surface textures, and material properties. The challenge lies in maintaining sensor functionality while preserving the inherent compliance and flexibility that defines soft robotic systems.
Furthermore, the development of bio-compatible and environmentally safe materials remains paramount for applications involving direct contact with sensitive biological systems or sterile environments. The materials must exhibit consistent performance across varying environmental conditions while maintaining their soft mechanical properties and sensing capabilities over extended operational periods.
The evolution of soft robotics has been driven by the limitations of traditional robotic systems in applications requiring gentle manipulation, adaptive grasping, and safe human-robot interaction. Early developments focused on pneumatic actuators and silicone-based materials, gradually expanding to include shape memory alloys, electroactive polymers, and advanced composite materials. The field has witnessed exponential growth over the past two decades, with significant contributions from research institutions worldwide and increasing commercial interest from industries ranging from healthcare to manufacturing.
Hypersensitive contact applications represent a critical frontier where soft robotics demonstrates exceptional potential. These applications encompass scenarios requiring extremely delicate touch sensitivity, precise force control, and adaptive contact mechanics. Medical procedures involving fragile tissues, handling of sensitive electronic components, archaeological artifact preservation, and interaction with vulnerable biological specimens exemplify the demanding requirements of hypersensitive contact scenarios.
The primary technical objectives for utilizing soft robotics in hypersensitive contact applications center on achieving unprecedented levels of tactile sensitivity while maintaining precise control and safety. Key goals include developing materials and actuators capable of detecting micro-scale forces and deformations, implementing real-time feedback systems that can process tactile information with minimal latency, and creating adaptive control algorithms that automatically adjust contact parameters based on environmental feedback.
Advanced sensing integration represents another crucial objective, requiring the seamless incorporation of distributed tactile sensors throughout soft robotic structures. These sensors must provide high-resolution spatial and temporal information about contact forces, surface textures, and material properties. The challenge lies in maintaining sensor functionality while preserving the inherent compliance and flexibility that defines soft robotic systems.
Furthermore, the development of bio-compatible and environmentally safe materials remains paramount for applications involving direct contact with sensitive biological systems or sterile environments. The materials must exhibit consistent performance across varying environmental conditions while maintaining their soft mechanical properties and sensing capabilities over extended operational periods.
Market Demand for Hypersensitive Soft Robotic Applications
The global market for hypersensitive soft robotic applications is experiencing unprecedented growth driven by increasing demands across multiple high-precision sectors. Healthcare represents the largest market segment, where surgical robotics, prosthetics, and rehabilitation devices require exceptional tactile sensitivity to interact safely with human tissue. The aging population worldwide has intensified the need for assistive technologies that can provide gentle, adaptive care while maintaining precise control.
Manufacturing industries are increasingly adopting hypersensitive soft robotics for handling delicate components in electronics, pharmaceuticals, and food processing. Traditional rigid automation systems often damage fragile materials, creating substantial market opportunities for soft robotic solutions that can manipulate objects with human-like dexterity and sensitivity. The semiconductor industry particularly values these capabilities for handling sensitive wafers and components.
Consumer electronics and wearable technology markets are driving demand for soft robotic interfaces that can provide haptic feedback and responsive touch interactions. Virtual reality, augmented reality, and gaming applications require sophisticated tactile systems that can simulate realistic touch sensations, creating new market segments for hypersensitive soft robotic technologies.
The automotive sector presents emerging opportunities as vehicles become more autonomous and require advanced sensing capabilities for passenger interaction and safety systems. Soft robotic components with hypersensitive contact abilities can enhance human-machine interfaces and provide adaptive seating and control systems that respond to individual user needs.
Research institutions and academic markets continue to expand as universities and laboratories invest in advanced robotic platforms for scientific research. These applications often require custom solutions with exceptional sensitivity for materials testing, biological research, and experimental procedures.
Market growth is further accelerated by increasing investment in robotics research and development, government initiatives supporting advanced manufacturing, and growing awareness of soft robotics advantages over traditional rigid systems. The convergence of artificial intelligence, advanced materials science, and sensor technologies is creating new application possibilities that were previously technically unfeasible.
Regional demand varies significantly, with North America and Europe leading in healthcare and research applications, while Asia-Pacific markets show strong growth in manufacturing and consumer electronics applications. This geographic distribution reflects different industrial priorities and technological adoption patterns across global markets.
Manufacturing industries are increasingly adopting hypersensitive soft robotics for handling delicate components in electronics, pharmaceuticals, and food processing. Traditional rigid automation systems often damage fragile materials, creating substantial market opportunities for soft robotic solutions that can manipulate objects with human-like dexterity and sensitivity. The semiconductor industry particularly values these capabilities for handling sensitive wafers and components.
Consumer electronics and wearable technology markets are driving demand for soft robotic interfaces that can provide haptic feedback and responsive touch interactions. Virtual reality, augmented reality, and gaming applications require sophisticated tactile systems that can simulate realistic touch sensations, creating new market segments for hypersensitive soft robotic technologies.
The automotive sector presents emerging opportunities as vehicles become more autonomous and require advanced sensing capabilities for passenger interaction and safety systems. Soft robotic components with hypersensitive contact abilities can enhance human-machine interfaces and provide adaptive seating and control systems that respond to individual user needs.
Research institutions and academic markets continue to expand as universities and laboratories invest in advanced robotic platforms for scientific research. These applications often require custom solutions with exceptional sensitivity for materials testing, biological research, and experimental procedures.
Market growth is further accelerated by increasing investment in robotics research and development, government initiatives supporting advanced manufacturing, and growing awareness of soft robotics advantages over traditional rigid systems. The convergence of artificial intelligence, advanced materials science, and sensor technologies is creating new application possibilities that were previously technically unfeasible.
Regional demand varies significantly, with North America and Europe leading in healthcare and research applications, while Asia-Pacific markets show strong growth in manufacturing and consumer electronics applications. This geographic distribution reflects different industrial priorities and technological adoption patterns across global markets.
Current State and Challenges in Soft Robotics Contact Sensing
Soft robotics contact sensing technology has achieved significant progress in recent years, with researchers developing various sensing mechanisms including capacitive, resistive, and optical approaches. Current soft sensors can detect forces ranging from micro-Newtons to several Newtons, with spatial resolutions reaching sub-millimeter scales. Leading institutions such as MIT, Harvard, and Stanford have demonstrated soft tactile sensors capable of detecting texture, pressure distribution, and even temperature variations. Commercial applications have emerged in prosthetics, human-robot interaction, and delicate manipulation tasks.
The integration of advanced materials has enabled remarkable sensing capabilities. Conductive elastomers, liquid metals, and nanocomposite materials have been successfully incorporated into soft robotic systems. These materials allow for distributed sensing across large surface areas while maintaining the inherent compliance of soft robots. Recent developments include self-healing sensors that can recover functionality after damage and multi-modal sensors that simultaneously detect multiple stimuli types.
Despite these advances, several critical challenges persist in achieving truly hypersensitive contact applications. Signal-to-noise ratio remains a fundamental limitation, particularly when detecting extremely small forces or subtle surface variations. Environmental factors such as temperature fluctuations, humidity changes, and electromagnetic interference significantly impact sensor performance and reliability. The trade-off between sensitivity and dynamic range continues to constrain sensor design, as highly sensitive sensors often suffer from limited measurement ranges.
Manufacturing consistency presents another major obstacle. Current fabrication methods for soft sensors often result in device-to-device variations that affect calibration and performance predictability. The lack of standardized manufacturing processes makes it difficult to achieve the precision required for hypersensitive applications. Additionally, the integration of sensing elements with soft actuators while maintaining mechanical properties remains technically challenging.
Durability and long-term stability issues significantly limit practical deployment. Soft sensors are susceptible to mechanical fatigue, material degradation, and drift in sensing characteristics over time. The harsh operating conditions often encountered in real-world applications accelerate these degradation processes. Furthermore, the complexity of signal processing and interpretation for distributed soft sensors requires sophisticated algorithms and computational resources, creating barriers for real-time hypersensitive applications.
The integration of advanced materials has enabled remarkable sensing capabilities. Conductive elastomers, liquid metals, and nanocomposite materials have been successfully incorporated into soft robotic systems. These materials allow for distributed sensing across large surface areas while maintaining the inherent compliance of soft robots. Recent developments include self-healing sensors that can recover functionality after damage and multi-modal sensors that simultaneously detect multiple stimuli types.
Despite these advances, several critical challenges persist in achieving truly hypersensitive contact applications. Signal-to-noise ratio remains a fundamental limitation, particularly when detecting extremely small forces or subtle surface variations. Environmental factors such as temperature fluctuations, humidity changes, and electromagnetic interference significantly impact sensor performance and reliability. The trade-off between sensitivity and dynamic range continues to constrain sensor design, as highly sensitive sensors often suffer from limited measurement ranges.
Manufacturing consistency presents another major obstacle. Current fabrication methods for soft sensors often result in device-to-device variations that affect calibration and performance predictability. The lack of standardized manufacturing processes makes it difficult to achieve the precision required for hypersensitive applications. Additionally, the integration of sensing elements with soft actuators while maintaining mechanical properties remains technically challenging.
Durability and long-term stability issues significantly limit practical deployment. Soft sensors are susceptible to mechanical fatigue, material degradation, and drift in sensing characteristics over time. The harsh operating conditions often encountered in real-world applications accelerate these degradation processes. Furthermore, the complexity of signal processing and interpretation for distributed soft sensors requires sophisticated algorithms and computational resources, creating barriers for real-time hypersensitive applications.
Current Solutions for Hypersensitive Contact in Soft Robotics
01 Soft tactile sensors with enhanced sensitivity
Advanced tactile sensing technologies utilize soft materials and specialized structures to achieve hypersensitive contact detection in robotic applications. These sensors incorporate flexible substrates with embedded sensing elements that can detect minute pressure changes and contact forces. The design focuses on mimicking biological touch receptors to provide high-resolution tactile feedback for delicate manipulation tasks.- Soft tactile sensors with enhanced sensitivity: Development of soft tactile sensors that utilize flexible materials and advanced sensing mechanisms to achieve hypersensitive contact detection. These sensors can detect minute pressure changes and contact forces through capacitive, resistive, or piezoelectric sensing principles. The soft nature of these sensors allows them to conform to irregular surfaces while maintaining high sensitivity for robotic applications.
- Flexible electronic skin for robotic touch sensing: Integration of flexible electronic components into skin-like structures that provide distributed sensing capabilities across robotic surfaces. These electronic skins incorporate arrays of sensors that can simultaneously detect multiple contact points, pressure distribution, and tactile information. The flexible substrate allows the sensing layer to stretch and bend while maintaining functionality.
- Soft actuators with integrated contact feedback: Soft robotic actuators that combine actuation mechanisms with embedded contact sensing capabilities. These systems enable real-time feedback during manipulation tasks by detecting contact forces and adjusting actuation accordingly. The integration of sensing and actuation in compliant materials allows for safer and more adaptive human-robot interaction.
- Conductive polymer-based touch sensors: Utilization of conductive polymers and elastomers to create highly sensitive contact sensors for soft robotics. These materials exhibit changes in electrical properties upon mechanical deformation, enabling precise detection of touch and pressure. The inherent flexibility and stretchability of polymer-based sensors make them ideal for integration into soft robotic systems.
- Multi-modal sensing for enhanced contact detection: Implementation of multiple sensing modalities within soft robotic systems to achieve comprehensive contact information. These systems combine different sensing principles such as pressure, temperature, and proximity detection to provide rich tactile feedback. The fusion of multi-modal sensory data enables more accurate interpretation of contact events and improved robotic manipulation capabilities.
02 Flexible electronic skin for robotic contact sensing
Electronic skin technologies integrate arrays of pressure-sensitive elements within flexible polymer matrices to create distributed sensing surfaces. These systems enable robots to detect contact location, force magnitude, and contact dynamics across large surface areas. The flexible nature allows conformability to curved surfaces while maintaining high sensitivity for precise interaction control.Expand Specific Solutions03 Capacitive and resistive sensing mechanisms
Hypersensitive contact detection employs capacitive or resistive sensing principles where mechanical deformation causes measurable changes in electrical properties. These mechanisms can be implemented using conductive elastomers, microstructured dielectrics, or ionic gels that respond to applied forces. The sensing approach provides rapid response times and high signal-to-noise ratios for detecting light touches.Expand Specific Solutions04 Multi-modal sensing integration
Advanced soft robotic systems combine multiple sensing modalities including pressure, temperature, and proximity detection to achieve comprehensive contact awareness. This integration enables discrimination between different contact types and environmental conditions. The multi-modal approach enhances robotic manipulation capabilities by providing rich sensory information for control algorithms.Expand Specific Solutions05 Signal processing and sensitivity enhancement
Specialized signal conditioning circuits and algorithms amplify weak contact signals while filtering noise to achieve hypersensitive detection thresholds. These systems employ differential measurements, adaptive filtering, and machine learning techniques to extract meaningful contact information from sensor outputs. The processing methods enable detection of forces in the millinewton range or below.Expand Specific Solutions
Key Players in Soft Robotics and Tactile Sensor Industry
The soft robotics field for hypersensitive contact applications is experiencing rapid growth, transitioning from early research phases to commercial viability. The market demonstrates significant expansion potential, driven by applications spanning healthcare, manufacturing, and consumer robotics. Technology maturity varies considerably across the competitive landscape, with leading research institutions like MIT, Harvard College, and Harbin Institute of Technology advancing fundamental research in compliant materials and tactile sensing systems. Commercial players including FRANKA EMIKA, Oxipital AI, and Aescape represent the translation of academic breakthroughs into market-ready solutions, while established corporations like Honda Motor and Disney Enterprises explore integration opportunities. Chinese institutions such as Zhejiang University and Beihang University contribute substantial research output, particularly in bio-inspired soft actuators. The competitive dynamics reveal a hybrid ecosystem where academic research drives innovation while emerging companies like Inspire-Robots and Shandong Weigao focus on specialized applications in medical and industrial automation sectors.
President & Fellows of Harvard College
Technical Solution: Harvard has developed advanced soft robotic systems utilizing pneumatic actuation and flexible materials for hypersensitive contact applications. Their approach focuses on bio-inspired designs that incorporate soft sensors and actuators made from elastomeric materials, enabling gentle manipulation of delicate objects. The technology employs distributed sensing networks integrated within the soft structure, allowing for real-time feedback and adaptive control during contact operations. Their soft grippers can detect forces as low as 0.1N and adjust grip strength accordingly, making them suitable for handling fragile items like biological tissues, electronic components, and food products.
Strengths: Pioneering research in bio-inspired soft robotics with excellent force sensitivity and adaptive capabilities. Weaknesses: Limited commercial scalability and higher manufacturing costs compared to rigid alternatives.
Massachusetts Institute of Technology
Technical Solution: MIT has developed sophisticated soft robotic systems that combine liquid metal sensors with pneumatic actuators for hypersensitive contact applications. Their technology utilizes embedded strain sensors and pressure-sensitive materials that can detect minute changes in contact forces and surface textures. The soft robots employ machine learning algorithms to interpret sensory data and adjust their behavior in real-time. Their systems can distinguish between different materials and apply appropriate contact forces ranging from micro-Newtons to several Newtons, making them ideal for medical procedures, precision assembly, and delicate material handling tasks.
Strengths: Advanced sensor integration and AI-driven control systems with high precision and adaptability. Weaknesses: Complex manufacturing processes and dependency on sophisticated control algorithms that require significant computational resources.
Core Innovations in Soft Material Contact Sensing Patents
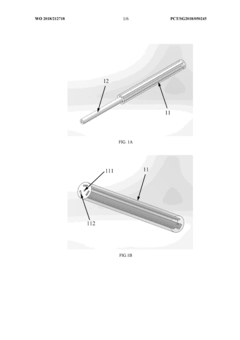
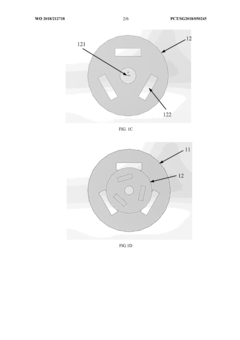
Method for making soft robot with stretchable coating
PatentWO2018212718A1
Innovation
- A method for creating a double-network hydrogel-based soft robot with a stretchable coating using a 'one-pot' process involving agarose, acrylamide, and N, N'-methylene-bisacrylamide, combined with MMT nanocoatings for enhanced mechanical stability and flame retardancy, allowing for customization and biocompatibility.
Safety Standards for Soft Robotics in Sensitive Applications
The development of safety standards for soft robotics in sensitive applications represents a critical frontier in ensuring the reliable deployment of these technologies in hypersensitive contact scenarios. Current regulatory frameworks primarily address traditional rigid robotics, creating a significant gap in addressing the unique characteristics and risks associated with soft robotic systems. The inherent compliance and adaptability of soft robots, while advantageous for sensitive interactions, introduce novel safety considerations that existing standards fail to adequately address.
International standardization bodies, including ISO and IEC, are actively working to establish comprehensive safety protocols specifically tailored to soft robotics applications. These emerging standards focus on material biocompatibility, force limitation mechanisms, and fail-safe operational modes that are particularly relevant for hypersensitive contact applications. The standards emphasize the need for continuous monitoring of contact forces, surface temperature regulation, and real-time assessment of material integrity during operation.
Key safety requirements being developed include mandatory force feedback systems that can detect and respond to unexpected resistance or pressure variations within milliseconds. These standards mandate the implementation of redundant safety mechanisms, including emergency stop protocols that can rapidly transition soft robots from active to passive states. Material certification requirements are being established to ensure that all contact surfaces meet stringent biocompatibility and hypoallergenic standards, particularly crucial for medical and personal care applications.
Compliance testing protocols are being standardized to evaluate soft robot performance under various failure scenarios, including material degradation, actuator malfunction, and sensor failure. These protocols require extensive validation testing across different environmental conditions and operational parameters. The standards also address cybersecurity considerations, recognizing that soft robots in sensitive applications may handle confidential data or operate in secure environments.
The implementation timeline for these safety standards varies by application domain, with medical applications requiring the most stringent compliance measures. Industry adoption is expected to accelerate as certification processes become more streamlined and cost-effective, ultimately enabling broader deployment of soft robotics in hypersensitive contact applications while maintaining the highest safety standards.
International standardization bodies, including ISO and IEC, are actively working to establish comprehensive safety protocols specifically tailored to soft robotics applications. These emerging standards focus on material biocompatibility, force limitation mechanisms, and fail-safe operational modes that are particularly relevant for hypersensitive contact applications. The standards emphasize the need for continuous monitoring of contact forces, surface temperature regulation, and real-time assessment of material integrity during operation.
Key safety requirements being developed include mandatory force feedback systems that can detect and respond to unexpected resistance or pressure variations within milliseconds. These standards mandate the implementation of redundant safety mechanisms, including emergency stop protocols that can rapidly transition soft robots from active to passive states. Material certification requirements are being established to ensure that all contact surfaces meet stringent biocompatibility and hypoallergenic standards, particularly crucial for medical and personal care applications.
Compliance testing protocols are being standardized to evaluate soft robot performance under various failure scenarios, including material degradation, actuator malfunction, and sensor failure. These protocols require extensive validation testing across different environmental conditions and operational parameters. The standards also address cybersecurity considerations, recognizing that soft robots in sensitive applications may handle confidential data or operate in secure environments.
The implementation timeline for these safety standards varies by application domain, with medical applications requiring the most stringent compliance measures. Industry adoption is expected to accelerate as certification processes become more streamlined and cost-effective, ultimately enabling broader deployment of soft robotics in hypersensitive contact applications while maintaining the highest safety standards.
Bio-compatibility Requirements for Soft Robotic Materials
Bio-compatibility represents a fundamental prerequisite for soft robotic systems intended for hypersensitive contact applications, particularly those involving direct interaction with biological tissues or prolonged human contact. The selection and development of appropriate materials must prioritize non-toxicity, biocompatibility, and minimal inflammatory response to ensure safe deployment in medical, prosthetic, and intimate human-machine interface scenarios.
Material composition requirements for bio-compatible soft robotics extend beyond traditional engineering considerations to encompass cytotoxicity testing, sensitization potential, and long-term biocompatibility assessments. Silicone-based elastomers, particularly medical-grade polydimethylsiloxane (PDMS) and platinum-catalyzed silicones, have emerged as preferred substrates due to their established biocompatibility profiles and regulatory approval for medical device applications. These materials demonstrate excellent chemical stability, low leachable content, and minimal tissue reactivity under physiological conditions.
Surface modification strategies play a crucial role in enhancing bio-compatibility while maintaining the mechanical properties essential for soft robotic functionality. Hydrophilic surface treatments, bioactive coatings, and antimicrobial functionalization can significantly improve tissue integration and reduce infection risks. Advanced surface engineering techniques, including plasma treatment and chemical grafting, enable precise control over surface properties without compromising bulk material characteristics.
Regulatory compliance frameworks, particularly ISO 10993 standards for biological evaluation of medical devices, provide essential guidelines for bio-compatibility assessment. These standards encompass cytotoxicity, sensitization, irritation, and systemic toxicity testing protocols that must be rigorously followed for soft robotic materials intended for biological contact applications. Additionally, FDA biocompatibility requirements and European Medical Device Regulation (MDR) compliance represent critical milestones for commercial deployment.
Sterilization compatibility emerges as another critical consideration, as soft robotic materials must withstand standard sterilization procedures without degradation of mechanical or bio-compatible properties. Gamma radiation, ethylene oxide, and steam sterilization methods each present unique challenges for elastomeric materials, requiring careful material selection and validation protocols to ensure maintained performance post-sterilization.
Long-term stability and degradation behavior under physiological conditions require comprehensive evaluation through accelerated aging studies and in-vivo testing protocols. Material degradation products must be thoroughly characterized to ensure they do not compromise bio-compatibility over extended deployment periods, particularly for implantable or chronic-contact applications where material integrity directly impacts patient safety and device efficacy.
Material composition requirements for bio-compatible soft robotics extend beyond traditional engineering considerations to encompass cytotoxicity testing, sensitization potential, and long-term biocompatibility assessments. Silicone-based elastomers, particularly medical-grade polydimethylsiloxane (PDMS) and platinum-catalyzed silicones, have emerged as preferred substrates due to their established biocompatibility profiles and regulatory approval for medical device applications. These materials demonstrate excellent chemical stability, low leachable content, and minimal tissue reactivity under physiological conditions.
Surface modification strategies play a crucial role in enhancing bio-compatibility while maintaining the mechanical properties essential for soft robotic functionality. Hydrophilic surface treatments, bioactive coatings, and antimicrobial functionalization can significantly improve tissue integration and reduce infection risks. Advanced surface engineering techniques, including plasma treatment and chemical grafting, enable precise control over surface properties without compromising bulk material characteristics.
Regulatory compliance frameworks, particularly ISO 10993 standards for biological evaluation of medical devices, provide essential guidelines for bio-compatibility assessment. These standards encompass cytotoxicity, sensitization, irritation, and systemic toxicity testing protocols that must be rigorously followed for soft robotic materials intended for biological contact applications. Additionally, FDA biocompatibility requirements and European Medical Device Regulation (MDR) compliance represent critical milestones for commercial deployment.
Sterilization compatibility emerges as another critical consideration, as soft robotic materials must withstand standard sterilization procedures without degradation of mechanical or bio-compatible properties. Gamma radiation, ethylene oxide, and steam sterilization methods each present unique challenges for elastomeric materials, requiring careful material selection and validation protocols to ensure maintained performance post-sterilization.
Long-term stability and degradation behavior under physiological conditions require comprehensive evaluation through accelerated aging studies and in-vivo testing protocols. Material degradation products must be thoroughly characterized to ensure they do not compromise bio-compatibility over extended deployment periods, particularly for implantable or chronic-contact applications where material integrity directly impacts patient safety and device efficacy.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!