Improving Soft Robotics Mobility in Wind-Affected Zones
APR 14, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Soft Robotics Wind Resistance Background and Objectives
Soft robotics has emerged as a transformative field within robotics engineering, characterized by the use of compliant materials and bio-inspired designs that enable robots to interact safely with complex environments. Unlike traditional rigid robots, soft robots utilize flexible materials such as silicones, hydrogels, and elastomers to achieve adaptive locomotion and manipulation capabilities. This paradigm shift has opened new possibilities for applications in unstructured environments where conventional robots face significant limitations.
The integration of soft robotics into outdoor and dynamic environments presents unique challenges, particularly in wind-affected zones where atmospheric disturbances can severely impact robot performance. Wind forces create unpredictable external loads that can destabilize soft robot locomotion, reduce positioning accuracy, and compromise mission effectiveness. These challenges are amplified by the inherent compliance of soft materials, which, while beneficial for adaptability, can make robots more susceptible to environmental perturbations.
Current soft robotics applications span diverse sectors including search and rescue operations, environmental monitoring, agricultural automation, and infrastructure inspection. However, deployment in wind-prone environments such as coastal areas, mountainous regions, and urban corridors with wind tunneling effects remains limited due to mobility constraints. The growing demand for autonomous systems capable of operating in these challenging conditions has highlighted the critical need for enhanced wind resistance capabilities.
The primary objective of improving soft robotics mobility in wind-affected zones centers on developing robust locomotion strategies that maintain operational effectiveness under varying wind conditions. This encompasses creating adaptive control algorithms that can compensate for wind-induced disturbances in real-time, optimizing morphological designs to minimize wind susceptibility, and implementing predictive systems that anticipate and counteract environmental forces.
Secondary objectives include establishing standardized testing protocols for wind resistance evaluation, developing materials with enhanced stiffness-compliance balance, and creating modular design frameworks that allow rapid adaptation to different wind environments. The ultimate goal is to enable soft robots to maintain precise navigation, stable locomotion, and reliable task execution in wind speeds ranging from light breezes to moderate gales, thereby expanding their operational envelope and practical utility in real-world applications.
The integration of soft robotics into outdoor and dynamic environments presents unique challenges, particularly in wind-affected zones where atmospheric disturbances can severely impact robot performance. Wind forces create unpredictable external loads that can destabilize soft robot locomotion, reduce positioning accuracy, and compromise mission effectiveness. These challenges are amplified by the inherent compliance of soft materials, which, while beneficial for adaptability, can make robots more susceptible to environmental perturbations.
Current soft robotics applications span diverse sectors including search and rescue operations, environmental monitoring, agricultural automation, and infrastructure inspection. However, deployment in wind-prone environments such as coastal areas, mountainous regions, and urban corridors with wind tunneling effects remains limited due to mobility constraints. The growing demand for autonomous systems capable of operating in these challenging conditions has highlighted the critical need for enhanced wind resistance capabilities.
The primary objective of improving soft robotics mobility in wind-affected zones centers on developing robust locomotion strategies that maintain operational effectiveness under varying wind conditions. This encompasses creating adaptive control algorithms that can compensate for wind-induced disturbances in real-time, optimizing morphological designs to minimize wind susceptibility, and implementing predictive systems that anticipate and counteract environmental forces.
Secondary objectives include establishing standardized testing protocols for wind resistance evaluation, developing materials with enhanced stiffness-compliance balance, and creating modular design frameworks that allow rapid adaptation to different wind environments. The ultimate goal is to enable soft robots to maintain precise navigation, stable locomotion, and reliable task execution in wind speeds ranging from light breezes to moderate gales, thereby expanding their operational envelope and practical utility in real-world applications.
Market Demand for Wind-Resistant Soft Robotics Applications
The global market for wind-resistant soft robotics applications is experiencing unprecedented growth driven by increasing deployment requirements in challenging environmental conditions. Traditional rigid robotic systems face significant limitations in wind-affected zones, creating substantial demand for adaptive soft robotic solutions that can maintain operational effectiveness under variable wind conditions.
Agricultural automation represents the largest market segment, where soft robots must operate in open fields exposed to natural wind patterns. Precision agriculture applications, including crop monitoring, selective harvesting, and pesticide application, require robotic systems capable of maintaining stability and accuracy despite wind interference. The growing emphasis on sustainable farming practices and labor shortage concerns are accelerating adoption of wind-resistant agricultural robotics.
Search and rescue operations constitute another critical market driver, particularly for disaster response scenarios where conventional robots struggle with unpredictable wind conditions. Emergency response teams increasingly require soft robotic platforms capable of navigating through debris-filled environments while withstanding strong wind gusts common in disaster zones. The ability to maintain communication and sensor functionality under adverse weather conditions has become a key procurement criterion.
Offshore and marine applications present significant market opportunities, where soft robots must withstand constant wind exposure while performing inspection, maintenance, and monitoring tasks. Oil and gas platforms, offshore wind farms, and marine research facilities require robotic solutions that can operate reliably in high-wind maritime environments. The expanding offshore renewable energy sector particularly drives demand for maintenance robots capable of functioning in persistent wind conditions.
Infrastructure inspection markets are increasingly seeking soft robotic solutions for bridge monitoring, power line maintenance, and building facade inspection in urban wind corridors. These applications require robots that can adapt to wind-induced vibrations while maintaining precise positioning for accurate data collection and task execution.
The defense and security sector represents an emerging market segment, where soft robots must perform surveillance and reconnaissance missions in exposed terrain subject to natural and artificial wind disturbances. Military applications demand robust performance under extreme environmental conditions, including desert winds, coastal gusts, and urban wind patterns created by building configurations.
Market growth is further accelerated by regulatory requirements for automated systems in hazardous environments where human operators face safety risks from both primary hazards and wind-related secondary dangers. Industries are increasingly mandated to deploy robotic solutions that can maintain operational safety standards regardless of environmental wind conditions.
Agricultural automation represents the largest market segment, where soft robots must operate in open fields exposed to natural wind patterns. Precision agriculture applications, including crop monitoring, selective harvesting, and pesticide application, require robotic systems capable of maintaining stability and accuracy despite wind interference. The growing emphasis on sustainable farming practices and labor shortage concerns are accelerating adoption of wind-resistant agricultural robotics.
Search and rescue operations constitute another critical market driver, particularly for disaster response scenarios where conventional robots struggle with unpredictable wind conditions. Emergency response teams increasingly require soft robotic platforms capable of navigating through debris-filled environments while withstanding strong wind gusts common in disaster zones. The ability to maintain communication and sensor functionality under adverse weather conditions has become a key procurement criterion.
Offshore and marine applications present significant market opportunities, where soft robots must withstand constant wind exposure while performing inspection, maintenance, and monitoring tasks. Oil and gas platforms, offshore wind farms, and marine research facilities require robotic solutions that can operate reliably in high-wind maritime environments. The expanding offshore renewable energy sector particularly drives demand for maintenance robots capable of functioning in persistent wind conditions.
Infrastructure inspection markets are increasingly seeking soft robotic solutions for bridge monitoring, power line maintenance, and building facade inspection in urban wind corridors. These applications require robots that can adapt to wind-induced vibrations while maintaining precise positioning for accurate data collection and task execution.
The defense and security sector represents an emerging market segment, where soft robots must perform surveillance and reconnaissance missions in exposed terrain subject to natural and artificial wind disturbances. Military applications demand robust performance under extreme environmental conditions, including desert winds, coastal gusts, and urban wind patterns created by building configurations.
Market growth is further accelerated by regulatory requirements for automated systems in hazardous environments where human operators face safety risks from both primary hazards and wind-related secondary dangers. Industries are increasingly mandated to deploy robotic solutions that can maintain operational safety standards regardless of environmental wind conditions.
Current Limitations of Soft Robots in Windy Environments
Soft robots operating in wind-affected environments face significant structural vulnerabilities due to their inherently compliant materials and flexible architectures. Unlike rigid robotic systems that can withstand substantial external forces through mechanical strength, soft robots rely on pneumatic, hydraulic, or cable-driven actuation systems that are particularly susceptible to wind-induced disturbances. The lightweight nature of elastomeric materials commonly used in soft robotics, such as silicone rubbers and thermoplastic polyurethanes, makes these systems prone to unwanted deformation and displacement when exposed to even moderate wind speeds.
Actuation precision represents another critical limitation in windy conditions. Soft robots typically employ pressure-based control systems that struggle to maintain accurate positioning when external aerodynamic forces interfere with intended movements. Wind gusts can cause unpredictable pressure variations within pneumatic chambers, leading to erratic locomotion patterns and compromised task execution. This challenge is particularly pronounced in applications requiring fine motor control or precise trajectory following.
The sensing and feedback control systems in current soft robotic platforms exhibit inadequate responsiveness to rapid environmental changes characteristic of windy conditions. Traditional soft robot sensors, including embedded strain gauges and pressure sensors, often lack the temporal resolution and sensitivity required to detect and compensate for wind-induced perturbations in real-time. This limitation results in delayed corrective responses that may be insufficient to maintain stable operation.
Energy efficiency becomes severely compromised in wind-affected zones as soft robots must continuously expend additional energy to counteract external forces. The constant need for corrective actuation to maintain desired postures or trajectories leads to accelerated power consumption, significantly reducing operational duration and limiting practical deployment scenarios.
Current soft robotic designs also lack effective aerodynamic considerations in their morphological structures. Most existing platforms prioritize flexibility and bio-inspired locomotion without incorporating wind-resistant features, resulting in high drag coefficients and poor aerodynamic stability. This oversight becomes particularly problematic for applications in outdoor environments where wind exposure is unavoidable.
Furthermore, the control algorithms employed in contemporary soft robotics are predominantly designed for controlled indoor environments and lack the sophistication required to handle the stochastic nature of wind disturbances. The absence of predictive control strategies and adaptive compensation mechanisms limits the ability of soft robots to proactively respond to changing wind conditions, relegating them to reactive operational modes that are inherently less effective.
Actuation precision represents another critical limitation in windy conditions. Soft robots typically employ pressure-based control systems that struggle to maintain accurate positioning when external aerodynamic forces interfere with intended movements. Wind gusts can cause unpredictable pressure variations within pneumatic chambers, leading to erratic locomotion patterns and compromised task execution. This challenge is particularly pronounced in applications requiring fine motor control or precise trajectory following.
The sensing and feedback control systems in current soft robotic platforms exhibit inadequate responsiveness to rapid environmental changes characteristic of windy conditions. Traditional soft robot sensors, including embedded strain gauges and pressure sensors, often lack the temporal resolution and sensitivity required to detect and compensate for wind-induced perturbations in real-time. This limitation results in delayed corrective responses that may be insufficient to maintain stable operation.
Energy efficiency becomes severely compromised in wind-affected zones as soft robots must continuously expend additional energy to counteract external forces. The constant need for corrective actuation to maintain desired postures or trajectories leads to accelerated power consumption, significantly reducing operational duration and limiting practical deployment scenarios.
Current soft robotic designs also lack effective aerodynamic considerations in their morphological structures. Most existing platforms prioritize flexibility and bio-inspired locomotion without incorporating wind-resistant features, resulting in high drag coefficients and poor aerodynamic stability. This oversight becomes particularly problematic for applications in outdoor environments where wind exposure is unavoidable.
Furthermore, the control algorithms employed in contemporary soft robotics are predominantly designed for controlled indoor environments and lack the sophistication required to handle the stochastic nature of wind disturbances. The absence of predictive control strategies and adaptive compensation mechanisms limits the ability of soft robots to proactively respond to changing wind conditions, relegating them to reactive operational modes that are inherently less effective.
Existing Wind Adaptation Solutions for Soft Robots
01 Pneumatic actuation systems for soft robots
Soft robotic systems utilize pneumatic actuation mechanisms to achieve controlled movement and mobility. These systems employ pressurized air or fluid to inflate and deflate flexible chambers or bladders, enabling the robot to bend, extend, or contract in desired directions. The pneumatic approach allows for compliant motion that can adapt to irregular surfaces and obstacles, making it suitable for applications requiring safe human interaction and navigation in unstructured environments.- Pneumatic actuation systems for soft robotic movement: Soft robotic systems utilize pneumatic actuation mechanisms to achieve flexible and adaptive movement. These systems employ pressurized air or fluid to inflate and deflate soft chambers or bladders, enabling controlled deformation and locomotion. The pneumatic approach allows for compliant interaction with environments and objects, making it suitable for applications requiring safe human-robot interaction and navigation in constrained spaces.
- Flexible material structures and composite designs: The mobility of soft robots is enhanced through the use of specialized flexible materials and composite structures. These designs incorporate elastomeric materials, fiber reinforcements, and multi-layer constructions that provide both flexibility and structural integrity. The material selection and geometric configuration enable controlled bending, twisting, and extension movements while maintaining durability during repeated actuation cycles.
- Biomimetic locomotion mechanisms: Soft robotic mobility systems draw inspiration from biological organisms to achieve efficient movement patterns. These mechanisms replicate natural locomotion strategies such as crawling, swimming, or undulating motions through the integration of multiple actuated segments. The biomimetic approach enables robots to traverse diverse terrains and adapt to environmental challenges through compliant body structures.
- Modular and reconfigurable soft robotic platforms: Modular design approaches enable soft robots to adapt their mobility capabilities through reconfigurable components. These platforms consist of interchangeable soft modules that can be assembled in various configurations to achieve different locomotion modes. The modular architecture facilitates customization for specific tasks and allows for repair or upgrade of individual components without replacing the entire system.
- Control systems and sensing integration for mobility: Advanced control algorithms and integrated sensing technologies enable precise management of soft robotic movement. These systems incorporate feedback mechanisms, proprioceptive sensors, and adaptive control strategies to regulate actuation timing, force distribution, and trajectory planning. The integration of sensing and control allows soft robots to respond dynamically to environmental conditions and achieve stable, coordinated locomotion across various surfaces.
02 Flexible material structures and fabrication methods
The construction of soft robots relies on specialized flexible materials and manufacturing techniques that enable deformable structures. These materials include elastomers, silicones, and composite materials that can withstand repeated deformation cycles while maintaining structural integrity. Advanced fabrication methods such as molding, 3D printing, and layered assembly are employed to create complex geometries that facilitate specific motion patterns and mobility characteristics in soft robotic systems.Expand Specific Solutions03 Control systems and sensing mechanisms
Soft robotic mobility systems incorporate sophisticated control algorithms and sensing technologies to achieve precise movement and environmental awareness. These systems integrate sensors that monitor position, pressure, strain, and external forces to provide feedback for adaptive control. The control mechanisms process sensory data to adjust actuation parameters in real-time, enabling the soft robot to navigate complex terrains, avoid obstacles, and perform coordinated movements with multiple degrees of freedom.Expand Specific Solutions04 Bio-inspired locomotion mechanisms
Soft robotic designs draw inspiration from biological organisms to achieve efficient mobility through various locomotion strategies. These bio-inspired approaches mimic the movement patterns of animals such as worms, octopi, or caterpillars, utilizing peristaltic motion, crawling, or undulating movements. The biomimetic designs leverage the inherent compliance of soft materials to replicate natural motion dynamics, resulting in energy-efficient locomotion that can traverse diverse terrains and confined spaces.Expand Specific Solutions05 Modular and reconfigurable soft robotic platforms
Advanced soft robotic systems feature modular architectures that allow for reconfiguration and adaptation to different mobility requirements. These platforms consist of interchangeable soft modules that can be assembled in various configurations to achieve different locomotion modes or functional capabilities. The modular approach enables scalability, easy maintenance, and customization for specific applications, while maintaining the compliant and adaptive characteristics essential for soft robotic mobility in dynamic environments.Expand Specific Solutions
Key Players in Soft Robotics and Wind-Resistant Systems
The soft robotics mobility sector in wind-affected environments represents an emerging technological frontier currently in its early development stage. The market remains nascent with significant growth potential as applications span from industrial automation to defense and medical robotics. Leading academic institutions including Harvard College, MIT-affiliated research centers, and prominent Chinese universities like Harbin Institute of Technology and Beihang University are driving fundamental research breakthroughs. Technology maturity varies considerably across players, with established companies like Hitachi Ltd. and Toyota Motor Corp. leveraging decades of engineering expertise, while specialized firms such as Ghost Robotics Corp. and Oxipital AI focus on cutting-edge robotic solutions. The competitive landscape shows strong collaboration between academia and industry, particularly evident in partnerships involving major research universities and technology corporations, indicating the field's transition from pure research toward commercial viability.
President & Fellows of Harvard College
Technical Solution: Harvard has developed advanced soft robotic systems with integrated wind-sensing capabilities using distributed pressure sensors and adaptive control algorithms. Their soft robots employ bio-inspired designs with flexible actuators that can dynamically adjust stiffness and shape in response to wind conditions. The university's research focuses on pneumatic soft actuators with real-time feedback control systems that enable robots to maintain stability and locomotion efficiency in turbulent wind environments. Their approach includes machine learning algorithms for predictive wind pattern analysis and adaptive gait modification strategies.
Strengths: Leading research institution with strong theoretical foundation and innovative bio-inspired designs. Weaknesses: Limited commercial applications and scalability challenges for mass production.
Harbin Institute of Technology
Technical Solution: Harbin Institute of Technology has conducted extensive research on soft robotics with focus on environmental adaptability and wind resistance. Their research includes development of bio-inspired soft robots with adaptive morphology that can change shape and stiffness to minimize wind impact during locomotion. The institute has developed novel soft actuator designs using smart materials and pneumatic systems that enable robots to maintain mobility in turbulent wind conditions. Their work includes computational fluid dynamics modeling to optimize soft robot designs for wind-affected environments and development of control strategies for wind disturbance rejection.
Strengths: Strong research foundation in robotics and advanced computational modeling capabilities. Weaknesses: Limited commercial partnerships and technology transfer opportunities compared to industry leaders.
Core Innovations in Wind-Resistant Soft Robot Design
Soft pneumatic hexapedal robot, and uses thereof
PatentActiveUS20220193891A1
Innovation
- A pneumatically actuated soft hexapedal robot with 2-DoF soft pneumatic actuators that can both bend and extend, employing an alternating tripod gait for effective locomotion on various terrains, allowing it to navigate obstacles and uneven surfaces.




Climbing soft robotics
PatentActiveUS20200156237A1
Innovation
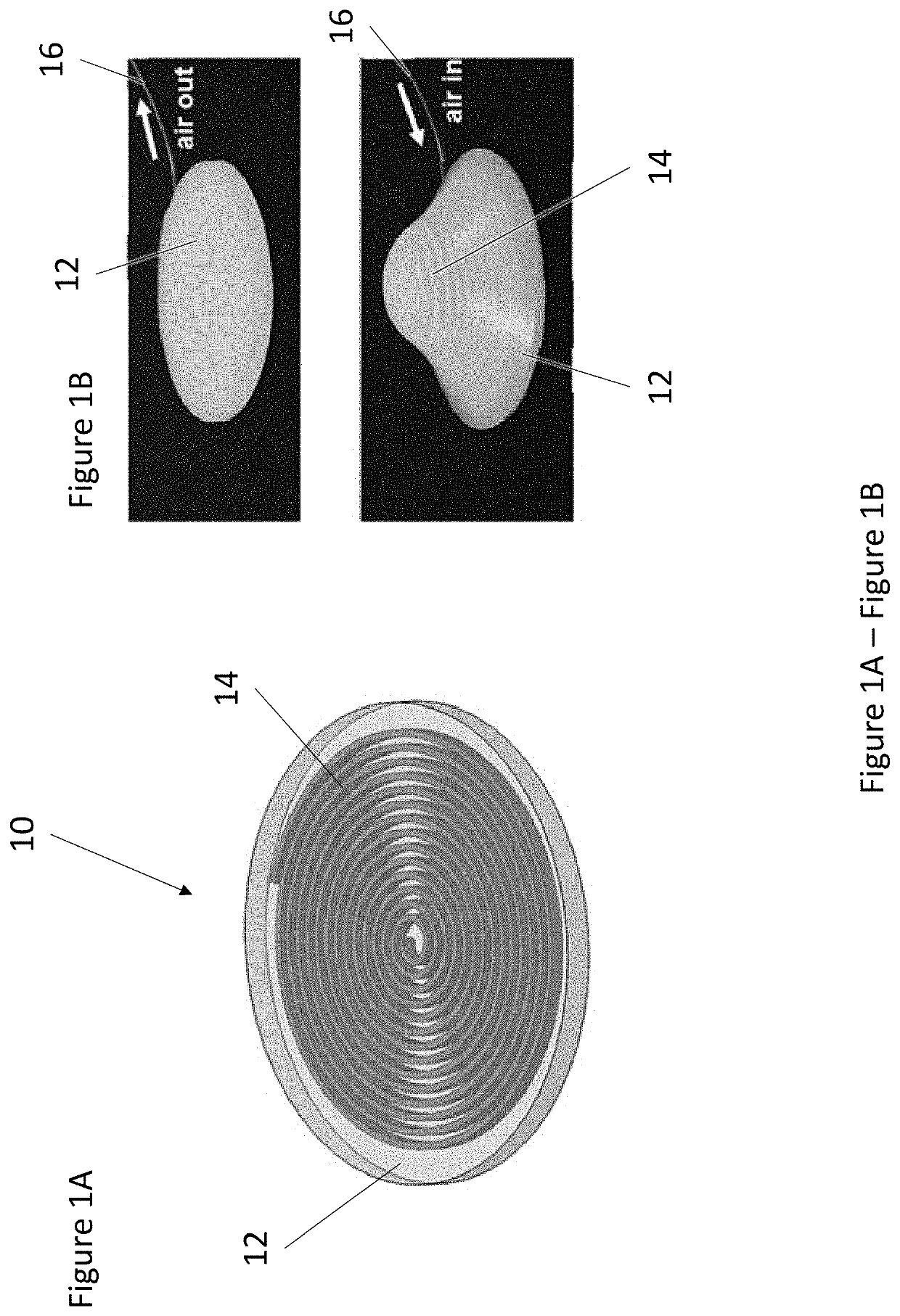
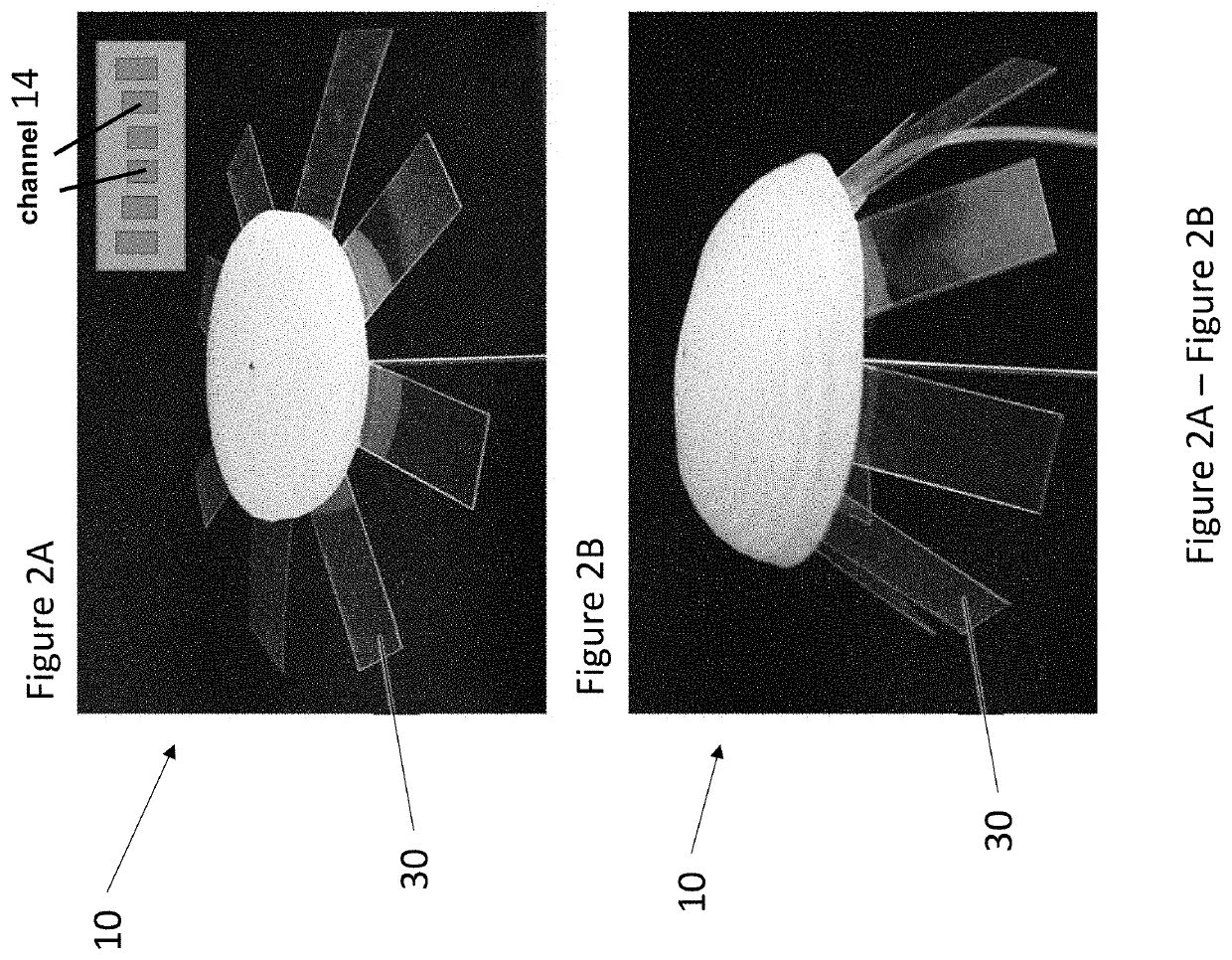
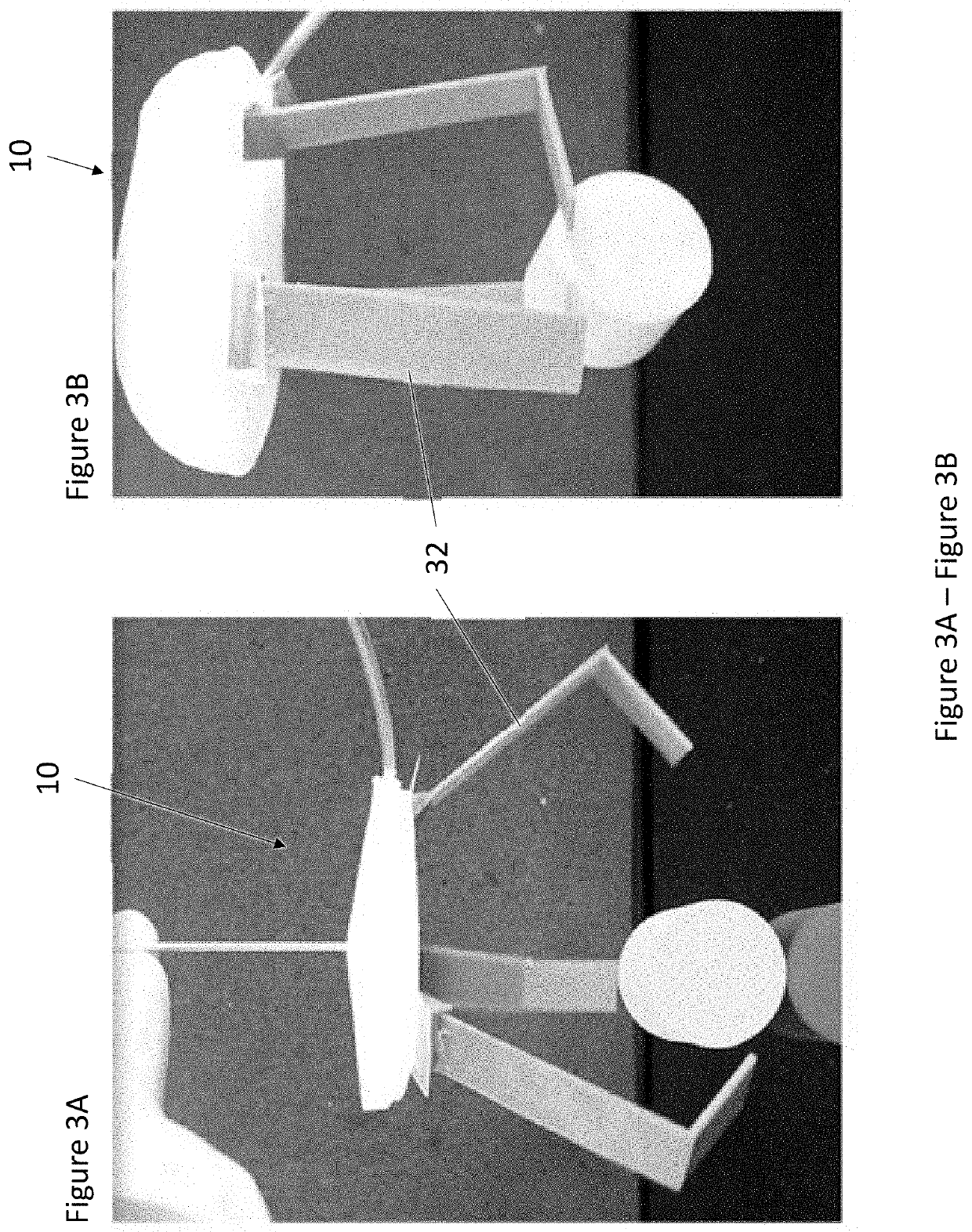
- A doming actuator device comprising a cylindrical enclosure with a spiral elongate tube, constructed from flexible elastomer, which allows for pneumatic actuation to achieve switchable and strong adhesion by generating a pressure difference, enabling soft robots to climb vertical surfaces and carry loads.

Environmental Impact Assessment for Outdoor Soft Robots
The deployment of soft robots in outdoor environments presents unique environmental considerations that require comprehensive assessment to ensure sustainable and responsible technological advancement. Unlike traditional rigid robots, soft robots interact with natural ecosystems through their compliant materials and adaptive behaviors, creating both opportunities and challenges for environmental integration.
Material composition represents a primary environmental concern for outdoor soft robotics applications. Most soft robots utilize elastomeric polymers, silicones, and synthetic rubbers that may persist in natural environments if not properly managed. The degradation pathways of these materials under various weather conditions, UV exposure, and temperature fluctuations must be thoroughly evaluated to prevent long-term environmental contamination. Additionally, the manufacturing processes for these specialized materials often involve energy-intensive procedures and chemical solvents that contribute to the overall environmental footprint.
Energy consumption patterns of outdoor soft robots differ significantly from conventional robotic systems due to their unique actuation mechanisms. Pneumatic and hydraulic systems commonly used in soft robotics may require continuous energy input to maintain structural integrity against wind forces, potentially increasing overall power demands. However, the lightweight nature of soft robots and their ability to harness environmental energy through bio-inspired designs may offset these requirements in certain applications.
Ecosystem interaction assessment reveals both positive and negative potential impacts. Soft robots' compliant nature reduces the risk of physical harm to wildlife compared to rigid alternatives, and their biomimetic designs may integrate more naturally into existing habitats. However, concerns arise regarding behavioral disruption of local fauna, particularly for robots operating in sensitive ecological zones or migration corridors.
Waste management and end-of-life considerations present significant challenges due to the specialized materials used in soft robot construction. Current recycling infrastructure is inadequately equipped to handle complex elastomeric composites, necessitating the development of dedicated disposal protocols or biodegradable material alternatives. The modular design approaches emerging in soft robotics offer promising solutions for component reuse and material recovery.
Regulatory compliance frameworks for outdoor soft robots remain underdeveloped, requiring proactive environmental impact assessment to establish appropriate guidelines. This includes evaluation of noise pollution from pneumatic systems, electromagnetic interference from control systems, and potential chemical leaching from materials exposed to environmental stressors over extended operational periods.
Material composition represents a primary environmental concern for outdoor soft robotics applications. Most soft robots utilize elastomeric polymers, silicones, and synthetic rubbers that may persist in natural environments if not properly managed. The degradation pathways of these materials under various weather conditions, UV exposure, and temperature fluctuations must be thoroughly evaluated to prevent long-term environmental contamination. Additionally, the manufacturing processes for these specialized materials often involve energy-intensive procedures and chemical solvents that contribute to the overall environmental footprint.
Energy consumption patterns of outdoor soft robots differ significantly from conventional robotic systems due to their unique actuation mechanisms. Pneumatic and hydraulic systems commonly used in soft robotics may require continuous energy input to maintain structural integrity against wind forces, potentially increasing overall power demands. However, the lightweight nature of soft robots and their ability to harness environmental energy through bio-inspired designs may offset these requirements in certain applications.
Ecosystem interaction assessment reveals both positive and negative potential impacts. Soft robots' compliant nature reduces the risk of physical harm to wildlife compared to rigid alternatives, and their biomimetic designs may integrate more naturally into existing habitats. However, concerns arise regarding behavioral disruption of local fauna, particularly for robots operating in sensitive ecological zones or migration corridors.
Waste management and end-of-life considerations present significant challenges due to the specialized materials used in soft robot construction. Current recycling infrastructure is inadequately equipped to handle complex elastomeric composites, necessitating the development of dedicated disposal protocols or biodegradable material alternatives. The modular design approaches emerging in soft robotics offer promising solutions for component reuse and material recovery.
Regulatory compliance frameworks for outdoor soft robots remain underdeveloped, requiring proactive environmental impact assessment to establish appropriate guidelines. This includes evaluation of noise pollution from pneumatic systems, electromagnetic interference from control systems, and potential chemical leaching from materials exposed to environmental stressors over extended operational periods.
Safety Standards for Wind-Exposed Robotic Operations
The development of comprehensive safety standards for wind-exposed robotic operations has become increasingly critical as soft robotics systems are deployed in challenging outdoor environments. Current regulatory frameworks primarily address traditional rigid robotics applications, leaving significant gaps in addressing the unique vulnerabilities and operational characteristics of soft robotic systems operating under wind influence.
International standards organizations, including ISO and IEC, have begun recognizing the need for specialized safety protocols that account for the deformable nature of soft robotics and their unpredictable behavior under aerodynamic forces. The IEEE Robotics and Automation Society has initiated working groups to establish baseline safety requirements, focusing on risk assessment methodologies specific to wind-affected operations.
Existing safety frameworks emphasize three primary categories: structural integrity standards, operational safety protocols, and environmental monitoring requirements. Structural integrity standards mandate minimum material strength-to-weight ratios and define acceptable deformation limits under specified wind conditions. These standards require soft robotic systems to maintain functional capability at wind speeds up to 15 m/s and implement fail-safe mechanisms when conditions exceed operational thresholds.
Operational safety protocols establish mandatory pre-deployment wind assessment procedures, requiring real-time meteorological monitoring and automated system shutdown capabilities. These protocols mandate the integration of distributed wind sensors and predictive algorithms that can anticipate dangerous wind patterns before they impact robotic operations.
Environmental monitoring requirements specify continuous assessment of wind conditions, including turbulence intensity measurements and gust factor calculations. Safety standards require redundant sensor systems and mandate data logging capabilities for post-incident analysis. Emergency response protocols must include rapid system recovery procedures and clear communication channels with human operators.
Recent developments in safety certification processes have introduced dynamic testing methodologies that simulate various wind scenarios, including sudden gusts, sustained winds, and turbulent conditions. These testing protocols evaluate system response times, stability maintenance, and graceful degradation capabilities under adverse conditions.
The integration of machine learning-based risk assessment tools into safety standards represents an emerging trend, enabling adaptive safety thresholds based on real-time environmental conditions and system performance data. These intelligent safety systems can dynamically adjust operational parameters to maintain safe operation while maximizing mission effectiveness in challenging wind environments.
International standards organizations, including ISO and IEC, have begun recognizing the need for specialized safety protocols that account for the deformable nature of soft robotics and their unpredictable behavior under aerodynamic forces. The IEEE Robotics and Automation Society has initiated working groups to establish baseline safety requirements, focusing on risk assessment methodologies specific to wind-affected operations.
Existing safety frameworks emphasize three primary categories: structural integrity standards, operational safety protocols, and environmental monitoring requirements. Structural integrity standards mandate minimum material strength-to-weight ratios and define acceptable deformation limits under specified wind conditions. These standards require soft robotic systems to maintain functional capability at wind speeds up to 15 m/s and implement fail-safe mechanisms when conditions exceed operational thresholds.
Operational safety protocols establish mandatory pre-deployment wind assessment procedures, requiring real-time meteorological monitoring and automated system shutdown capabilities. These protocols mandate the integration of distributed wind sensors and predictive algorithms that can anticipate dangerous wind patterns before they impact robotic operations.
Environmental monitoring requirements specify continuous assessment of wind conditions, including turbulence intensity measurements and gust factor calculations. Safety standards require redundant sensor systems and mandate data logging capabilities for post-incident analysis. Emergency response protocols must include rapid system recovery procedures and clear communication channels with human operators.
Recent developments in safety certification processes have introduced dynamic testing methodologies that simulate various wind scenarios, including sudden gusts, sustained winds, and turbulent conditions. These testing protocols evaluate system response times, stability maintenance, and graceful degradation capabilities under adverse conditions.
The integration of machine learning-based risk assessment tools into safety standards represents an emerging trend, enabling adaptive safety thresholds based on real-time environmental conditions and system performance data. These intelligent safety systems can dynamically adjust operational parameters to maintain safe operation while maximizing mission effectiveness in challenging wind environments.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!