

Humanoid Locomotion for Security Applications: Benefits
APR 22, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Humanoid Security Robotics Background and Objectives
The evolution of humanoid robotics has undergone significant transformation since its inception in the mid-20th century. Early developments focused primarily on basic bipedal locomotion and simple manipulation tasks within controlled laboratory environments. However, the convergence of advanced artificial intelligence, sophisticated sensor technologies, and robust mechanical engineering has propelled humanoid robotics into practical application domains, particularly in security and surveillance sectors.
The security industry has historically relied on static surveillance systems, human personnel, and wheeled robotic platforms for monitoring and threat detection. Traditional security solutions face inherent limitations including restricted mobility in complex terrains, vulnerability to environmental conditions, and constraints in accessing multi-level structures. The integration of humanoid locomotion capabilities addresses these fundamental challenges by providing unprecedented mobility and operational flexibility in diverse security environments.
Current technological trends indicate a paradigm shift toward autonomous security systems capable of navigating human-designed spaces without infrastructure modifications. Advanced locomotion algorithms, combined with real-time environmental perception and adaptive control systems, enable humanoid security robots to traverse stairs, navigate narrow corridors, and operate in crowded public spaces where conventional wheeled systems would prove inadequate.
The primary objective of implementing humanoid locomotion in security applications centers on achieving comprehensive spatial coverage and enhanced operational effectiveness. These systems aim to provide continuous surveillance capabilities across varied terrains while maintaining human-like presence that can serve both deterrent and interactive functions. The technology seeks to bridge the gap between static monitoring systems and human security personnel by offering persistent, tireless operation with consistent performance standards.
Strategic goals encompass the development of autonomous patrol capabilities that can adapt to dynamic security scenarios, respond to emerging threats, and integrate seamlessly with existing security infrastructure. The ultimate vision involves creating intelligent security ecosystems where humanoid robots complement human operators, extending surveillance reach into previously inaccessible areas while providing real-time threat assessment and response coordination.
The security industry has historically relied on static surveillance systems, human personnel, and wheeled robotic platforms for monitoring and threat detection. Traditional security solutions face inherent limitations including restricted mobility in complex terrains, vulnerability to environmental conditions, and constraints in accessing multi-level structures. The integration of humanoid locomotion capabilities addresses these fundamental challenges by providing unprecedented mobility and operational flexibility in diverse security environments.
Current technological trends indicate a paradigm shift toward autonomous security systems capable of navigating human-designed spaces without infrastructure modifications. Advanced locomotion algorithms, combined with real-time environmental perception and adaptive control systems, enable humanoid security robots to traverse stairs, navigate narrow corridors, and operate in crowded public spaces where conventional wheeled systems would prove inadequate.
The primary objective of implementing humanoid locomotion in security applications centers on achieving comprehensive spatial coverage and enhanced operational effectiveness. These systems aim to provide continuous surveillance capabilities across varied terrains while maintaining human-like presence that can serve both deterrent and interactive functions. The technology seeks to bridge the gap between static monitoring systems and human security personnel by offering persistent, tireless operation with consistent performance standards.
Strategic goals encompass the development of autonomous patrol capabilities that can adapt to dynamic security scenarios, respond to emerging threats, and integrate seamlessly with existing security infrastructure. The ultimate vision involves creating intelligent security ecosystems where humanoid robots complement human operators, extending surveillance reach into previously inaccessible areas while providing real-time threat assessment and response coordination.
Security Market Demand for Humanoid Locomotion Systems
The global security market is experiencing unprecedented demand for advanced autonomous systems, with humanoid locomotion technologies emerging as a critical component of next-generation security infrastructure. Traditional security solutions face significant limitations in complex environments, creating substantial market opportunities for humanoid robots capable of navigating diverse terrains and architectural challenges.
Physical security services represent one of the largest addressable markets, where humanoid systems can supplement or replace human guards in high-risk scenarios. Critical infrastructure protection, including power plants, airports, and government facilities, demonstrates strong demand for autonomous patrol systems that can operate continuously without fatigue or safety concerns for human personnel.
Border security and perimeter monitoring applications show particularly robust market interest, driven by the need for persistent surveillance in challenging geographical conditions. Humanoid locomotion systems offer unique advantages in traversing uneven terrain, stairs, and confined spaces that wheeled or tracked robots cannot effectively navigate.
The commercial security sector exhibits growing demand for humanoid systems in retail environments, corporate campuses, and residential complexes. These applications require sophisticated mobility capabilities to interact naturally with human environments while maintaining security protocols and emergency response readiness.
Emergency response and disaster management markets present significant opportunities for humanoid locomotion technologies. First responders increasingly require robotic assistance in hazardous environments where human access is limited or dangerous, including structural collapses, chemical incidents, and natural disasters.
Law enforcement agencies demonstrate increasing interest in humanoid systems for specialized operations, including bomb disposal, hostage situations, and crowd control scenarios. The ability to navigate complex indoor environments while maintaining human-like mobility patterns represents a key market differentiator.
Market demand is further accelerated by labor shortages in security services, rising personnel costs, and increasing emphasis on worker safety. Organizations seek technological solutions that can provide consistent security coverage while reducing liability and operational expenses associated with human security personnel in high-risk environments.
Physical security services represent one of the largest addressable markets, where humanoid systems can supplement or replace human guards in high-risk scenarios. Critical infrastructure protection, including power plants, airports, and government facilities, demonstrates strong demand for autonomous patrol systems that can operate continuously without fatigue or safety concerns for human personnel.
Border security and perimeter monitoring applications show particularly robust market interest, driven by the need for persistent surveillance in challenging geographical conditions. Humanoid locomotion systems offer unique advantages in traversing uneven terrain, stairs, and confined spaces that wheeled or tracked robots cannot effectively navigate.
The commercial security sector exhibits growing demand for humanoid systems in retail environments, corporate campuses, and residential complexes. These applications require sophisticated mobility capabilities to interact naturally with human environments while maintaining security protocols and emergency response readiness.
Emergency response and disaster management markets present significant opportunities for humanoid locomotion technologies. First responders increasingly require robotic assistance in hazardous environments where human access is limited or dangerous, including structural collapses, chemical incidents, and natural disasters.
Law enforcement agencies demonstrate increasing interest in humanoid systems for specialized operations, including bomb disposal, hostage situations, and crowd control scenarios. The ability to navigate complex indoor environments while maintaining human-like mobility patterns represents a key market differentiator.
Market demand is further accelerated by labor shortages in security services, rising personnel costs, and increasing emphasis on worker safety. Organizations seek technological solutions that can provide consistent security coverage while reducing liability and operational expenses associated with human security personnel in high-risk environments.
Current Humanoid Locomotion Challenges in Security Contexts
Humanoid robots deployed in security applications face significant locomotion challenges that limit their operational effectiveness in real-world scenarios. The complex and unpredictable nature of security environments demands sophisticated mobility capabilities that current humanoid systems struggle to achieve consistently.
Dynamic terrain navigation represents one of the most pressing challenges. Security environments often feature irregular surfaces, stairs, debris, and obstacles that require adaptive gait patterns and real-time balance adjustments. Current humanoid locomotion systems frequently fail when transitioning between different surface types or encountering unexpected terrain variations, leading to instability and potential mission failures.
Speed and agility limitations severely constrain operational deployment. Most existing humanoid robots operate at walking speeds significantly slower than human counterparts, making them unsuitable for pursuit scenarios or rapid response situations. The trade-off between stability and speed remains a critical bottleneck, as increasing locomotion velocity often compromises balance control systems.
Environmental robustness poses another substantial challenge. Security applications demand operation in diverse weather conditions, including rain, snow, and extreme temperatures. Current locomotion systems often lack adequate weatherproofing and environmental adaptation capabilities, with sensor degradation and mechanical component failures occurring under adverse conditions.
Power consumption and endurance constraints limit operational duration. Advanced locomotion control algorithms require substantial computational resources, while actuator systems consume significant battery power. This results in limited operational windows that may not align with security mission requirements, particularly for extended surveillance or patrol duties.
Real-time obstacle detection and avoidance capabilities remain insufficient for dynamic security environments. Current systems struggle with moving obstacles, crowd navigation, and rapid environmental changes. The integration of perception systems with locomotion control often introduces latency issues that compromise response times in critical situations.
Balance recovery mechanisms represent a critical weakness in current implementations. When humanoid robots encounter unexpected disturbances or impacts, their ability to maintain stability and continue operation is often inadequate. This vulnerability is particularly concerning in security contexts where physical interference or hostile actions may be encountered.
Stair climbing and vertical mobility capabilities are inconsistent across different humanoid platforms. Many systems require specialized programming for specific staircase configurations and struggle with non-standard step dimensions or handrail integration, limiting their deployment flexibility in multi-level security environments.
Human-robot interaction during locomotion presents additional challenges. Security applications often require humanoid robots to operate alongside human personnel, necessitating predictable movement patterns and safe interaction protocols that current systems have not fully mastered.
Dynamic terrain navigation represents one of the most pressing challenges. Security environments often feature irregular surfaces, stairs, debris, and obstacles that require adaptive gait patterns and real-time balance adjustments. Current humanoid locomotion systems frequently fail when transitioning between different surface types or encountering unexpected terrain variations, leading to instability and potential mission failures.
Speed and agility limitations severely constrain operational deployment. Most existing humanoid robots operate at walking speeds significantly slower than human counterparts, making them unsuitable for pursuit scenarios or rapid response situations. The trade-off between stability and speed remains a critical bottleneck, as increasing locomotion velocity often compromises balance control systems.
Environmental robustness poses another substantial challenge. Security applications demand operation in diverse weather conditions, including rain, snow, and extreme temperatures. Current locomotion systems often lack adequate weatherproofing and environmental adaptation capabilities, with sensor degradation and mechanical component failures occurring under adverse conditions.
Power consumption and endurance constraints limit operational duration. Advanced locomotion control algorithms require substantial computational resources, while actuator systems consume significant battery power. This results in limited operational windows that may not align with security mission requirements, particularly for extended surveillance or patrol duties.
Real-time obstacle detection and avoidance capabilities remain insufficient for dynamic security environments. Current systems struggle with moving obstacles, crowd navigation, and rapid environmental changes. The integration of perception systems with locomotion control often introduces latency issues that compromise response times in critical situations.
Balance recovery mechanisms represent a critical weakness in current implementations. When humanoid robots encounter unexpected disturbances or impacts, their ability to maintain stability and continue operation is often inadequate. This vulnerability is particularly concerning in security contexts where physical interference or hostile actions may be encountered.
Stair climbing and vertical mobility capabilities are inconsistent across different humanoid platforms. Many systems require specialized programming for specific staircase configurations and struggle with non-standard step dimensions or handrail integration, limiting their deployment flexibility in multi-level security environments.
Human-robot interaction during locomotion presents additional challenges. Security applications often require humanoid robots to operate alongside human personnel, necessitating predictable movement patterns and safe interaction protocols that current systems have not fully mastered.
Existing Humanoid Locomotion Solutions for Security
01 Bipedal walking control systems for humanoid robots
Control systems and methods for achieving stable bipedal walking in humanoid robots through gait planning, balance control, and dynamic motion generation. These systems utilize sensors and feedback mechanisms to maintain stability during locomotion, enabling robots to walk on various terrains while adapting to environmental changes and disturbances.- Bipedal walking control systems and gait generation: Technologies for controlling bipedal humanoid robots during walking involve gait generation algorithms, balance control mechanisms, and trajectory planning systems. These systems enable stable locomotion by coordinating joint movements, managing center of mass positioning, and adapting to different terrains. Advanced control methods include zero moment point calculations, inverted pendulum models, and dynamic stability algorithms that ensure smooth and natural walking patterns.
- Joint actuation and mechanical design for humanoid legs: Mechanical structures and actuation systems for humanoid robot legs focus on joint configurations, actuator placement, and linkage mechanisms. These designs incorporate multiple degrees of freedom at hip, knee, and ankle joints to replicate human-like movement. The mechanical systems include torque transmission mechanisms, compliance elements, and structural components that balance strength with weight considerations for efficient locomotion.
- Sensor integration and feedback systems for locomotion: Sensor technologies for humanoid locomotion include force sensors, inertial measurement units, joint encoders, and vision systems that provide real-time feedback for motion control. These sensing systems enable robots to detect ground contact, measure joint positions, monitor body orientation, and perceive environmental obstacles. The integrated sensor data is processed to adjust gait parameters dynamically and maintain stable walking under varying conditions.
- Machine learning and adaptive control for humanoid movement: Artificial intelligence and machine learning approaches are applied to humanoid locomotion for adaptive gait control, motion optimization, and learning-based behavior generation. These methods enable robots to learn walking patterns from demonstrations, optimize energy efficiency, and adapt to new environments through reinforcement learning or neural network-based controllers. The systems can improve performance over time and handle unexpected disturbances during locomotion.
- Energy efficiency and power management in humanoid locomotion: Power optimization techniques for humanoid robots focus on reducing energy consumption during walking through efficient actuator control, regenerative braking, and optimized gait patterns. These approaches include passive dynamic walking principles, elastic energy storage mechanisms, and intelligent power distribution systems. Energy-efficient locomotion extends operational time and enables practical deployment of humanoid robots in real-world applications.
02 Joint actuation and mechanical design for humanoid movement
Mechanical structures and actuation systems designed specifically for humanoid robots to enable natural human-like movement. This includes joint configurations, actuator arrangements, and linkage mechanisms that replicate human skeletal and muscular systems, allowing for efficient energy transfer and smooth motion execution across multiple degrees of freedom.Expand Specific Solutions03 Motion planning and trajectory optimization algorithms
Advanced algorithms for planning and optimizing movement trajectories in humanoid robots, including path planning, obstacle avoidance, and motion sequencing. These computational methods enable robots to generate efficient and natural-looking movements while considering kinematic constraints, energy efficiency, and task requirements.Expand Specific Solutions04 Balance and posture control mechanisms
Systems and methods for maintaining balance and controlling posture in humanoid robots during locomotion and stationary positions. These mechanisms incorporate real-time sensor data processing, center of mass calculations, and corrective actions to prevent falls and ensure stable operation under various conditions and external forces.Expand Specific Solutions05 Learning and adaptive locomotion systems
Machine learning and adaptive control approaches that enable humanoid robots to improve their locomotion capabilities through experience and environmental interaction. These systems allow robots to learn from demonstrations, adapt to new terrains, and optimize their movement patterns based on performance feedback and changing conditions.Expand Specific Solutions
Leading Companies in Security Humanoid Development
The humanoid locomotion for security applications market represents an emerging sector within the broader robotics industry, currently in its early development stage with significant growth potential. The market remains relatively small but is expanding rapidly as security demands increase globally and technological capabilities advance. From a technology maturity perspective, the field demonstrates varied levels of sophistication across different players. Established technology giants like Sony Group Corp. and NEC Corp. bring advanced hardware and AI integration capabilities, while specialized robotics companies such as UBTECH Robotics Corp. Ltd. and Shanghai Yogo Robot Co., Ltd. focus on practical deployment solutions. Academic institutions including Harbin Institute of Technology, Zhejiang University, and South China University of Technology contribute fundamental research in locomotion algorithms and control systems. The competitive landscape shows a hybrid ecosystem where traditional tech companies, specialized robotics firms, and research institutions collaborate to advance humanoid mobility technologies for security applications, though widespread commercial deployment remains limited by current technological constraints and cost considerations.
UBTECH Robotics Corp. Ltd.
Technical Solution: UBTECH has developed advanced humanoid robots like Walker X and AIMBOT for security applications, featuring dynamic locomotion capabilities with real-time gait adaptation and obstacle avoidance. Their humanoid security robots integrate multi-modal sensors including LiDAR, cameras, and IMU systems for autonomous patrol missions. The locomotion system utilizes advanced control algorithms for stable bipedal walking on various terrains, enabling 24/7 security monitoring, perimeter patrol, and threat detection in complex environments. The robots can navigate stairs, uneven surfaces, and crowded areas while maintaining balance and operational efficiency.
Strengths: Proven commercial deployment experience, robust locomotion algorithms, comprehensive sensor integration. Weaknesses: Higher power consumption compared to wheeled alternatives, complex maintenance requirements for bipedal systems.
NEC Corp.
Technical Solution: NEC has developed humanoid locomotion systems integrated with their facial recognition and AI security platforms, creating comprehensive security solutions. Their humanoid robots feature adaptive locomotion control with real-time terrain analysis and dynamic gait adjustment capabilities. The system combines bipedal walking technology with advanced computer vision for autonomous security patrol missions, enabling navigation through complex indoor and outdoor environments. The locomotion algorithms support continuous operation for extended security monitoring while maintaining stable movement patterns for optimal sensor data collection and threat assessment.
Strengths: Strong integration with existing security infrastructure, proven AI and recognition technologies, enterprise-grade reliability. Weaknesses: Limited agility compared to specialized robotics companies, higher integration complexity.
Core Locomotion Technologies for Security Robots
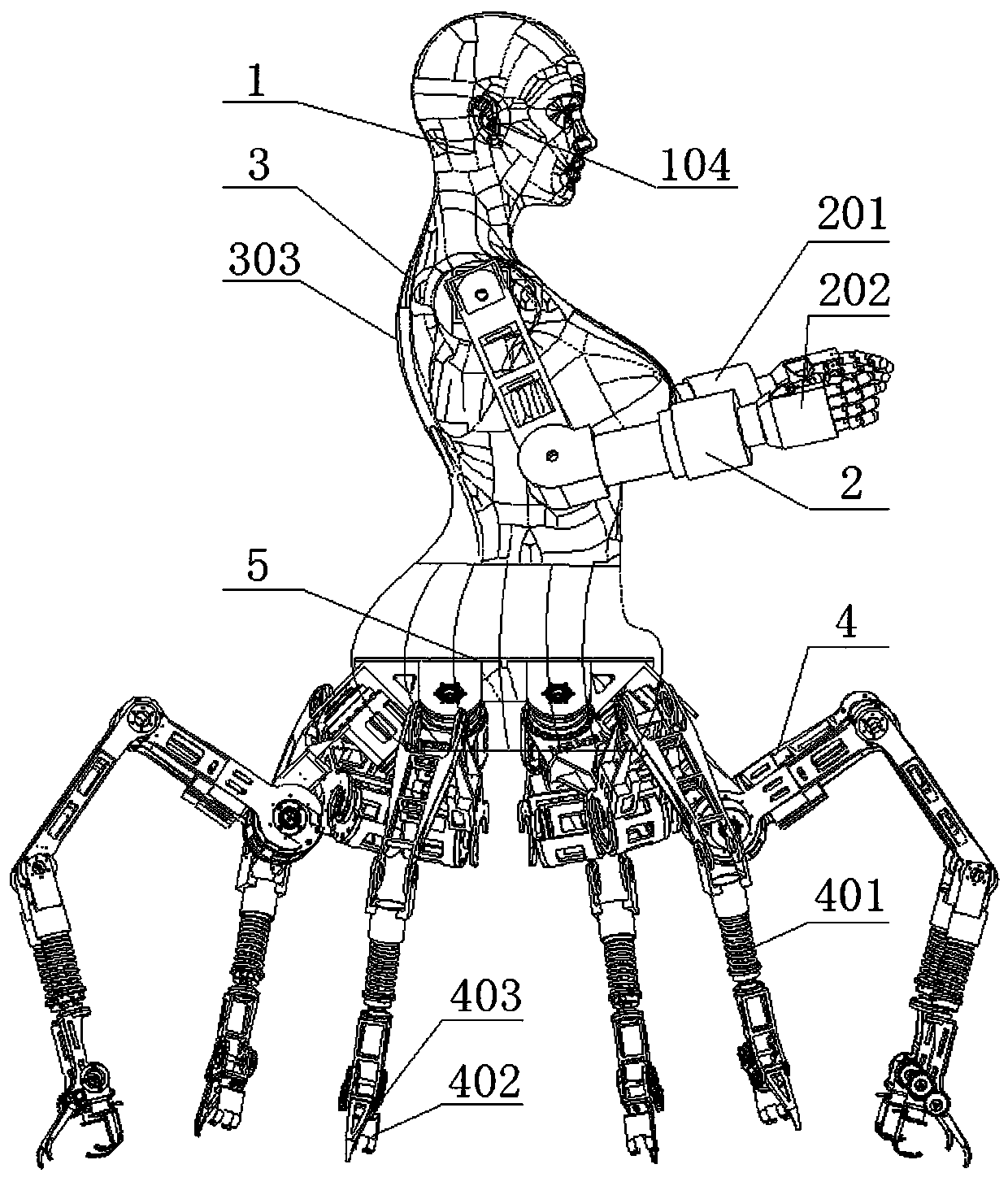
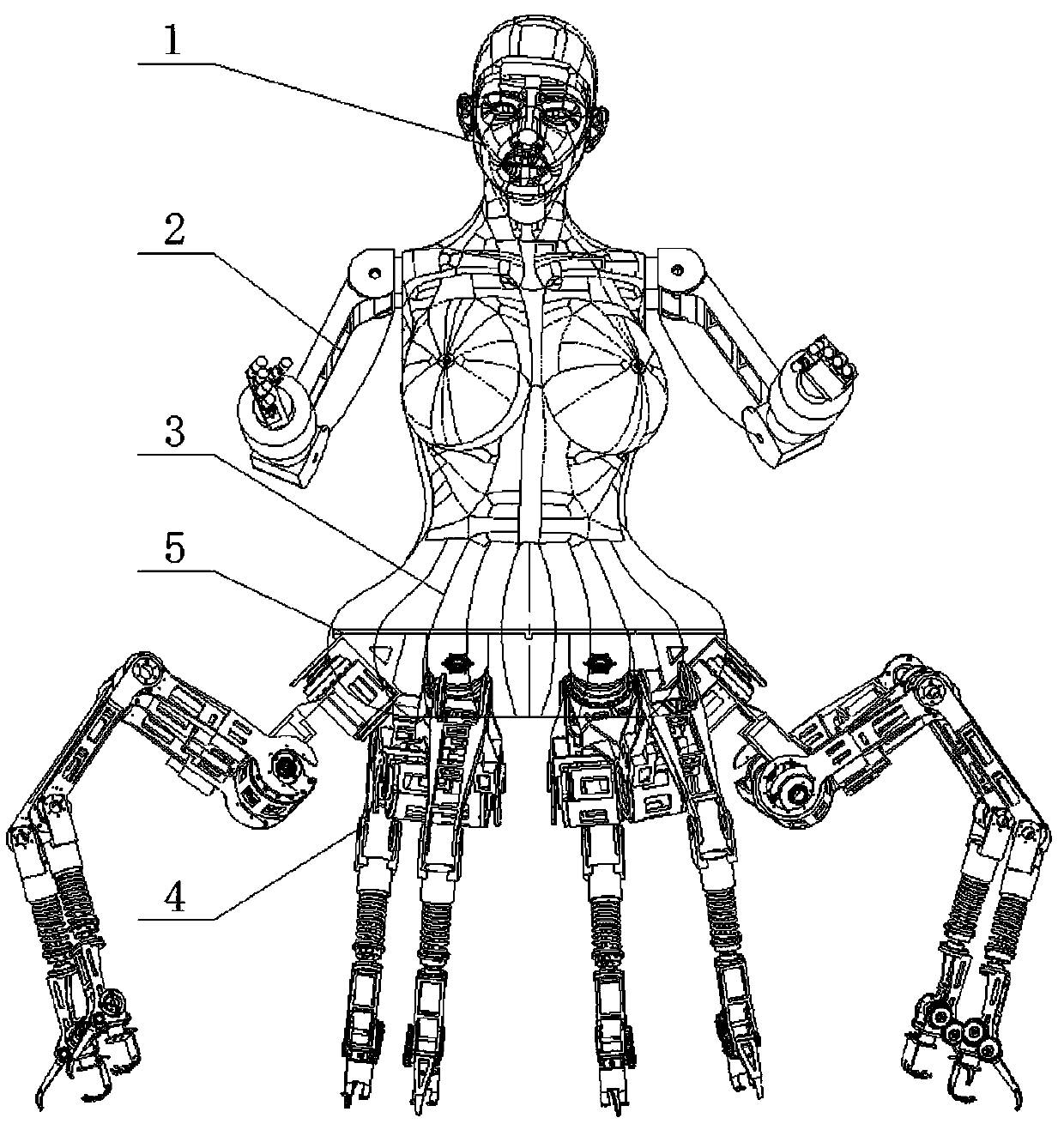
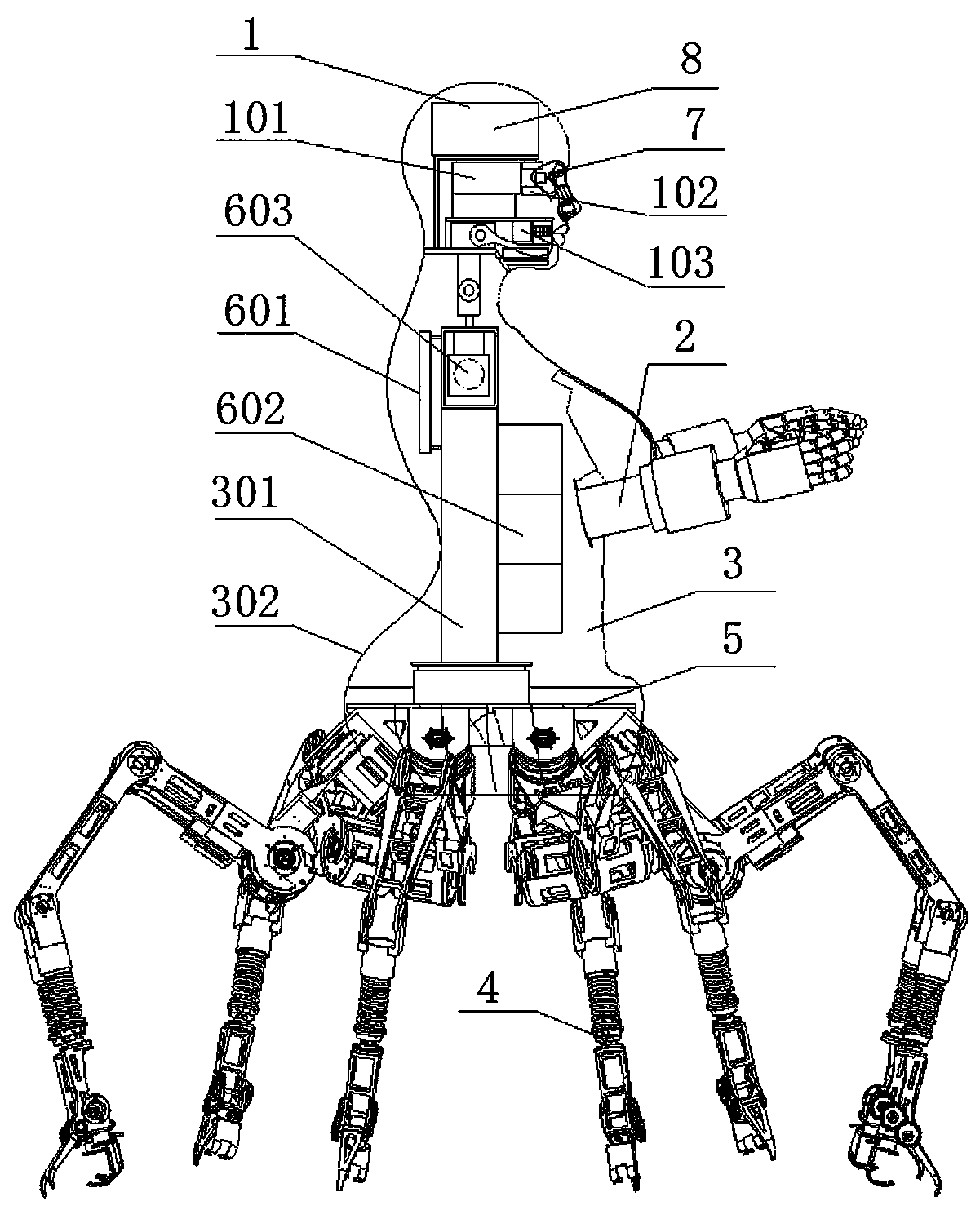
Multifunctional humanoid multi-legged robot
PatentActiveCN110524561A
Innovation
- A multi-functional humanoid multi-legged robot is designed, which uses multi-joint or multi-degree-of-freedom bionic mechanical legs, combined with a humanoid mechanical head and neck, arms and torso, equipped with elastic shock-absorbing components and an autonomous power control mechanism, which can operate on complex terrains. Walk, run and climb, and have attack and defense functions.

Security Robot Deployment Regulations and Standards
The deployment of humanoid security robots operates within a complex regulatory landscape that varies significantly across jurisdictions. Currently, most countries lack specific legislation addressing humanoid robots in security applications, instead relying on existing frameworks governing autonomous systems, surveillance equipment, and security services. The European Union has taken the lead with its proposed AI Act, which establishes risk-based categories for AI systems, potentially classifying security robots as high-risk applications requiring stringent compliance measures.
In the United States, the regulatory approach remains fragmented, with the Federal Aviation Administration overseeing aerial security drones while ground-based humanoid robots fall under various state and local jurisdictions. The National Institute of Standards and Technology has begun developing cybersecurity frameworks specifically for robotic systems, recognizing the unique vulnerabilities these platforms present in security contexts.
International standards organizations have established foundational guidelines that directly impact humanoid security robot deployment. ISO 13482 provides safety requirements for personal care robots, while ISO 10218 addresses industrial robot safety standards. These frameworks are being adapted to accommodate the unique operational requirements of security applications, particularly regarding human-robot interaction protocols and fail-safe mechanisms.
Privacy regulations present another critical compliance layer, as humanoid security robots typically incorporate advanced surveillance capabilities. The General Data Protection Regulation in Europe and various state privacy laws in the US impose strict requirements on data collection, processing, and storage. Security robot operators must implement privacy-by-design principles, ensuring biometric data and surveillance footage are handled according to applicable data protection standards.
Liability frameworks remain one of the most challenging regulatory aspects, as traditional security service regulations struggle to address scenarios involving autonomous decision-making by humanoid robots. Insurance requirements, operator licensing, and incident reporting protocols are still evolving, with many jurisdictions requiring case-by-case evaluation of deployment proposals.
Professional certification standards are emerging through industry associations and standards bodies, establishing minimum competency requirements for operators and maintenance personnel. These standards typically cover system operation, emergency response procedures, and ethical considerations in autonomous security operations.
In the United States, the regulatory approach remains fragmented, with the Federal Aviation Administration overseeing aerial security drones while ground-based humanoid robots fall under various state and local jurisdictions. The National Institute of Standards and Technology has begun developing cybersecurity frameworks specifically for robotic systems, recognizing the unique vulnerabilities these platforms present in security contexts.
International standards organizations have established foundational guidelines that directly impact humanoid security robot deployment. ISO 13482 provides safety requirements for personal care robots, while ISO 10218 addresses industrial robot safety standards. These frameworks are being adapted to accommodate the unique operational requirements of security applications, particularly regarding human-robot interaction protocols and fail-safe mechanisms.
Privacy regulations present another critical compliance layer, as humanoid security robots typically incorporate advanced surveillance capabilities. The General Data Protection Regulation in Europe and various state privacy laws in the US impose strict requirements on data collection, processing, and storage. Security robot operators must implement privacy-by-design principles, ensuring biometric data and surveillance footage are handled according to applicable data protection standards.
Liability frameworks remain one of the most challenging regulatory aspects, as traditional security service regulations struggle to address scenarios involving autonomous decision-making by humanoid robots. Insurance requirements, operator licensing, and incident reporting protocols are still evolving, with many jurisdictions requiring case-by-case evaluation of deployment proposals.
Professional certification standards are emerging through industry associations and standards bodies, establishing minimum competency requirements for operators and maintenance personnel. These standards typically cover system operation, emergency response procedures, and ethical considerations in autonomous security operations.
Privacy and Ethical Implications of Security Humanoids
The deployment of humanoid robots in security applications raises significant privacy concerns that must be carefully addressed. These autonomous systems are typically equipped with advanced surveillance capabilities including high-resolution cameras, facial recognition technology, biometric scanners, and audio recording devices. The continuous collection of personal data in public and private spaces creates unprecedented opportunities for privacy invasion, as these robots can potentially track individuals' movements, record conversations, and build comprehensive behavioral profiles without explicit consent.
Data protection becomes particularly complex when humanoid security robots operate across multiple jurisdictions with varying privacy regulations. The storage, processing, and sharing of collected information must comply with frameworks such as GDPR in Europe, CCPA in California, and other regional privacy laws. Organizations deploying these systems face challenges in ensuring data minimization, purpose limitation, and providing transparent disclosure about data collection practices to individuals who may encounter these robots in their daily activities.
Ethical implications extend beyond privacy to encompass broader societal concerns about surveillance normalization and civil liberties. The anthropomorphic nature of humanoid robots may create psychological impacts on individuals, potentially leading to increased anxiety or behavioral modification in public spaces. There are legitimate concerns about the potential for mission creep, where security robots initially deployed for specific purposes gradually expand their surveillance capabilities or operational scope without proper oversight.
The question of accountability presents another critical ethical dimension. When humanoid security robots make decisions that affect individuals' rights or safety, determining responsibility becomes complex. Clear protocols must be established for human oversight, intervention capabilities, and appeal processes when automated security decisions impact citizens. Additionally, the potential for bias in AI algorithms used for threat detection or behavioral analysis raises concerns about discriminatory enforcement and equal treatment under security protocols.
Regulatory frameworks are still evolving to address these challenges, requiring ongoing dialogue between technology developers, security professionals, privacy advocates, and policymakers to establish appropriate safeguards while enabling beneficial security applications.
Data protection becomes particularly complex when humanoid security robots operate across multiple jurisdictions with varying privacy regulations. The storage, processing, and sharing of collected information must comply with frameworks such as GDPR in Europe, CCPA in California, and other regional privacy laws. Organizations deploying these systems face challenges in ensuring data minimization, purpose limitation, and providing transparent disclosure about data collection practices to individuals who may encounter these robots in their daily activities.
Ethical implications extend beyond privacy to encompass broader societal concerns about surveillance normalization and civil liberties. The anthropomorphic nature of humanoid robots may create psychological impacts on individuals, potentially leading to increased anxiety or behavioral modification in public spaces. There are legitimate concerns about the potential for mission creep, where security robots initially deployed for specific purposes gradually expand their surveillance capabilities or operational scope without proper oversight.
The question of accountability presents another critical ethical dimension. When humanoid security robots make decisions that affect individuals' rights or safety, determining responsibility becomes complex. Clear protocols must be established for human oversight, intervention capabilities, and appeal processes when automated security decisions impact citizens. Additionally, the potential for bias in AI algorithms used for threat detection or behavioral analysis raises concerns about discriminatory enforcement and equal treatment under security protocols.
Regulatory frameworks are still evolving to address these challenges, requiring ongoing dialogue between technology developers, security professionals, privacy advocates, and policymakers to establish appropriate safeguards while enabling beneficial security applications.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!