Humanoid Locomotion: Noise Reduction Techniques
APR 22, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Humanoid Locomotion Noise Background and Objectives
Humanoid robotics has emerged as one of the most challenging and promising fields in modern robotics, with applications spanning from industrial automation to personal assistance and entertainment. The development of humanoid robots capable of natural, human-like locomotion represents a convergence of advanced mechanical engineering, control systems, and artificial intelligence. However, one of the most persistent and technically challenging aspects of humanoid locomotion is the generation of mechanical noise during movement operations.
The noise generated by humanoid robots during locomotion stems from multiple sources including actuator operations, gear transmissions, joint mechanisms, and ground contact impacts. These noise sources not only affect the robot's operational stealth and social acceptance but also indicate energy inefficiencies and potential mechanical wear that could compromise long-term reliability. In residential, healthcare, and service environments, excessive noise levels can significantly limit the practical deployment of humanoid robots.
Historical development in this field began with early bipedal robots in the 1970s, where noise reduction was secondary to achieving basic walking stability. As humanoid robots evolved through the 1990s and 2000s, with notable developments from Honda's ASIMO and Boston Dynamics' Atlas series, the focus gradually shifted toward more sophisticated locomotion control. However, noise reduction remained largely unaddressed until recent years when commercial applications demanded quieter operation.
The technical evolution has progressed from purely mechanical solutions to integrated approaches combining advanced materials, smart actuator design, and sophisticated control algorithms. Early attempts focused on mechanical dampening and improved gear designs, while contemporary approaches leverage real-time adaptive control systems that can predict and minimize noise-generating movements before they occur.
Current technological objectives center on achieving sub-40 decibel operation during normal walking conditions, which approaches the noise level of quiet human footsteps. This target represents a significant reduction from typical humanoid robot noise levels that often exceed 60-70 decibels. Additionally, the field aims to develop noise reduction techniques that do not compromise locomotion stability, speed, or energy efficiency.
The ultimate goal extends beyond mere noise suppression to encompass the development of inherently quiet locomotion systems that integrate seamlessly into human environments. This includes advancing silent actuator technologies, developing predictive noise cancellation algorithms, and creating adaptive gait patterns that automatically adjust to minimize acoustic signatures while maintaining optimal performance characteristics across diverse terrains and operational scenarios.
The noise generated by humanoid robots during locomotion stems from multiple sources including actuator operations, gear transmissions, joint mechanisms, and ground contact impacts. These noise sources not only affect the robot's operational stealth and social acceptance but also indicate energy inefficiencies and potential mechanical wear that could compromise long-term reliability. In residential, healthcare, and service environments, excessive noise levels can significantly limit the practical deployment of humanoid robots.
Historical development in this field began with early bipedal robots in the 1970s, where noise reduction was secondary to achieving basic walking stability. As humanoid robots evolved through the 1990s and 2000s, with notable developments from Honda's ASIMO and Boston Dynamics' Atlas series, the focus gradually shifted toward more sophisticated locomotion control. However, noise reduction remained largely unaddressed until recent years when commercial applications demanded quieter operation.
The technical evolution has progressed from purely mechanical solutions to integrated approaches combining advanced materials, smart actuator design, and sophisticated control algorithms. Early attempts focused on mechanical dampening and improved gear designs, while contemporary approaches leverage real-time adaptive control systems that can predict and minimize noise-generating movements before they occur.
Current technological objectives center on achieving sub-40 decibel operation during normal walking conditions, which approaches the noise level of quiet human footsteps. This target represents a significant reduction from typical humanoid robot noise levels that often exceed 60-70 decibels. Additionally, the field aims to develop noise reduction techniques that do not compromise locomotion stability, speed, or energy efficiency.
The ultimate goal extends beyond mere noise suppression to encompass the development of inherently quiet locomotion systems that integrate seamlessly into human environments. This includes advancing silent actuator technologies, developing predictive noise cancellation algorithms, and creating adaptive gait patterns that automatically adjust to minimize acoustic signatures while maintaining optimal performance characteristics across diverse terrains and operational scenarios.
Market Demand for Quiet Humanoid Robots
The market demand for quiet humanoid robots is experiencing unprecedented growth across multiple sectors, driven by the increasing integration of robotic systems into human-centric environments. Traditional industrial robots operated in isolated factory settings where noise levels were less critical, but humanoid robots are designed to work alongside humans in offices, homes, healthcare facilities, and public spaces where acoustic comfort is paramount.
Healthcare represents one of the most significant market segments demanding quiet humanoid locomotion. Hospitals and elderly care facilities require robots that can navigate corridors, deliver medications, and assist patients without disturbing the healing environment. The aging global population has intensified this demand, as healthcare institutions seek automated solutions that maintain the tranquil atmosphere essential for patient recovery and staff concentration.
The domestic service robot market is rapidly expanding as consumers increasingly accept robotic assistance in their homes. Quiet operation has become a decisive purchasing factor, particularly for robots performing tasks during nighttime hours or in multi-generational households. Market research indicates that noise levels significantly influence consumer acceptance rates, with quieter robots achieving higher satisfaction scores and repeat purchase intentions.
Commercial and office environments present another substantial market opportunity. Humanoid robots deployed for cleaning, security, and customer service must operate during business hours without disrupting workplace productivity or professional meetings. The corporate sector's emphasis on employee well-being and productivity has made acoustic performance a critical specification in procurement decisions.
Educational institutions are emerging as a growing market segment, where humanoid robots serve as teaching assistants and interactive learning tools. The classroom environment demands minimal acoustic disruption to maintain student focus and enable clear communication between teachers and students.
The hospitality industry has begun adopting humanoid robots for guest services, room cleaning, and concierge functions. Hotels and restaurants prioritize quiet operation to preserve the premium experience expected by guests, making noise reduction a competitive differentiator in this market segment.
Market drivers include stringent noise regulations in urban environments, increasing awareness of noise pollution's health impacts, and the premium pricing that manufacturers can command for acoustically optimized robots. These factors collectively create a compelling business case for investing in advanced noise reduction technologies for humanoid locomotion systems.
Healthcare represents one of the most significant market segments demanding quiet humanoid locomotion. Hospitals and elderly care facilities require robots that can navigate corridors, deliver medications, and assist patients without disturbing the healing environment. The aging global population has intensified this demand, as healthcare institutions seek automated solutions that maintain the tranquil atmosphere essential for patient recovery and staff concentration.
The domestic service robot market is rapidly expanding as consumers increasingly accept robotic assistance in their homes. Quiet operation has become a decisive purchasing factor, particularly for robots performing tasks during nighttime hours or in multi-generational households. Market research indicates that noise levels significantly influence consumer acceptance rates, with quieter robots achieving higher satisfaction scores and repeat purchase intentions.
Commercial and office environments present another substantial market opportunity. Humanoid robots deployed for cleaning, security, and customer service must operate during business hours without disrupting workplace productivity or professional meetings. The corporate sector's emphasis on employee well-being and productivity has made acoustic performance a critical specification in procurement decisions.
Educational institutions are emerging as a growing market segment, where humanoid robots serve as teaching assistants and interactive learning tools. The classroom environment demands minimal acoustic disruption to maintain student focus and enable clear communication between teachers and students.
The hospitality industry has begun adopting humanoid robots for guest services, room cleaning, and concierge functions. Hotels and restaurants prioritize quiet operation to preserve the premium experience expected by guests, making noise reduction a competitive differentiator in this market segment.
Market drivers include stringent noise regulations in urban environments, increasing awareness of noise pollution's health impacts, and the premium pricing that manufacturers can command for acoustically optimized robots. These factors collectively create a compelling business case for investing in advanced noise reduction technologies for humanoid locomotion systems.
Current Noise Issues in Humanoid Walking Systems
Humanoid robots face significant noise challenges during locomotion that stem from multiple mechanical and control system sources. The primary noise contributors include actuator systems, particularly servo motors and gear reducers, which generate high-frequency mechanical vibrations during joint movements. These components produce both electromagnetic noise from motor windings and mechanical grinding sounds from gear mesh interactions, creating acoustic signatures that can exceed 60-70 decibels during normal walking operations.
Foot-ground impact represents another critical noise source in humanoid walking systems. The repetitive contact between robotic feet and various surface materials generates substantial impact noise, particularly during heel strike and toe-off phases of the gait cycle. This impact noise varies significantly based on surface hardness, foot design materials, and walking speed parameters. Hard surfaces like concrete or metal flooring amplify these impact sounds, while the lack of natural damping mechanisms found in biological feet exacerbates the problem.
Structural vibrations throughout the robot's frame contribute to noise propagation and amplification. The rigid mechanical linkages and joints transmit vibrations from individual actuators across the entire robotic structure, creating resonance effects that can amplify certain frequency ranges. These structural vibrations often manifest as rattling or buzzing sounds, particularly when multiple joints operate simultaneously during complex walking maneuvers.
Control system noise emerges from high-frequency switching in motor drivers and power electronics. Pulse-width modulation signals used in motor control create electromagnetic interference and audible switching noise, especially in systems operating at lower switching frequencies. Additionally, feedback control systems attempting to maintain balance and trajectory tracking can introduce oscillatory behaviors that generate repetitive mechanical noise patterns.
Cooling systems and auxiliary components add another layer of noise complexity. Fans required for thermal management of high-power actuators and control electronics contribute continuous background noise. Hydraulic or pneumatic systems, when present, introduce pump noise, valve switching sounds, and fluid flow turbulence that compound the overall acoustic signature of the walking system.
The cumulative effect of these noise sources creates significant challenges for humanoid robots operating in human environments, where noise levels must remain acceptable for social interaction and workplace integration. Current noise levels often exceed comfortable thresholds for prolonged human-robot coexistence, necessitating comprehensive noise reduction strategies across all system components.
Foot-ground impact represents another critical noise source in humanoid walking systems. The repetitive contact between robotic feet and various surface materials generates substantial impact noise, particularly during heel strike and toe-off phases of the gait cycle. This impact noise varies significantly based on surface hardness, foot design materials, and walking speed parameters. Hard surfaces like concrete or metal flooring amplify these impact sounds, while the lack of natural damping mechanisms found in biological feet exacerbates the problem.
Structural vibrations throughout the robot's frame contribute to noise propagation and amplification. The rigid mechanical linkages and joints transmit vibrations from individual actuators across the entire robotic structure, creating resonance effects that can amplify certain frequency ranges. These structural vibrations often manifest as rattling or buzzing sounds, particularly when multiple joints operate simultaneously during complex walking maneuvers.
Control system noise emerges from high-frequency switching in motor drivers and power electronics. Pulse-width modulation signals used in motor control create electromagnetic interference and audible switching noise, especially in systems operating at lower switching frequencies. Additionally, feedback control systems attempting to maintain balance and trajectory tracking can introduce oscillatory behaviors that generate repetitive mechanical noise patterns.
Cooling systems and auxiliary components add another layer of noise complexity. Fans required for thermal management of high-power actuators and control electronics contribute continuous background noise. Hydraulic or pneumatic systems, when present, introduce pump noise, valve switching sounds, and fluid flow turbulence that compound the overall acoustic signature of the walking system.
The cumulative effect of these noise sources creates significant challenges for humanoid robots operating in human environments, where noise levels must remain acceptable for social interaction and workplace integration. Current noise levels often exceed comfortable thresholds for prolonged human-robot coexistence, necessitating comprehensive noise reduction strategies across all system components.
Existing Noise Reduction Solutions for Humanoids
01 Noise reduction in humanoid robot joint mechanisms
Technologies focused on reducing mechanical noise generated by joint actuators and transmission systems in humanoid robots. This includes the use of specialized gear designs, damping materials, and optimized motor control strategies to minimize vibration and acoustic emissions during locomotion. Advanced bearing systems and lubrication techniques are employed to reduce friction-induced noise in articulated joints.- Noise reduction in humanoid robot joint mechanisms: Technologies focused on reducing mechanical noise generated by joint actuators and transmission systems in humanoid robots. This includes the use of specialized gear designs, damping materials, and optimized motor control strategies to minimize vibration and acoustic emissions during locomotion. Advanced bearing systems and lubrication techniques are employed to reduce friction-induced noise in articulated joints.
- Gait control algorithms for quiet locomotion: Control methods that optimize walking patterns and foot placement strategies to minimize impact noise during humanoid robot locomotion. These algorithms adjust stride length, foot trajectory, and landing velocity to reduce ground contact forces. Adaptive control systems monitor and adjust gait parameters in real-time based on surface conditions and noise feedback to achieve quieter operation.
- Acoustic dampening in foot and leg structures: Structural designs incorporating sound-absorbing materials and compliant elements in the feet and lower limbs of humanoid robots. These designs feature multi-layer sole constructions with elastomeric compounds and foam materials that absorb impact energy. Specialized foot pad geometries and materials are used to distribute contact forces and reduce noise generation during walking and running motions.
- Active noise cancellation systems for robotic locomotion: Electronic systems that detect and counteract noise produced during humanoid robot movement through active cancellation techniques. These systems use microphones to monitor operational sounds and generate inverse sound waves to reduce overall noise levels. Integration with motion control systems allows predictive noise cancellation based on planned movements and known noise signatures of mechanical components.
- Sensor-based noise monitoring and feedback control: Monitoring systems that use acoustic sensors and vibration detectors to measure noise levels during humanoid locomotion and provide feedback for control optimization. These systems identify noise sources in real-time and adjust operational parameters to maintain noise below specified thresholds. Machine learning algorithms analyze noise patterns to predict and prevent excessive noise generation through proactive control adjustments.
02 Gait control algorithms for quiet locomotion
Control methods that optimize walking patterns and foot placement strategies to minimize impact noise during humanoid robot locomotion. These algorithms adjust stride length, foot trajectory, and landing velocity to reduce ground contact forces. Adaptive control systems monitor and adjust gait parameters in real-time based on surface conditions and noise feedback to achieve quieter operation.Expand Specific Solutions03 Acoustic dampening foot and leg structures
Structural designs incorporating sound-absorbing materials and compliant elements in the feet and lower limbs of humanoid robots. These designs feature multi-layer sole constructions with elastomeric materials that absorb impact energy and reduce noise transmission. Specialized foot pad geometries and materials are used to distribute contact forces and minimize acoustic signatures during walking and running.Expand Specific Solutions04 Active noise cancellation systems for robotic locomotion
Electronic systems that generate anti-phase sound waves to cancel out locomotion noise in humanoid robots. These systems use microphones to detect operational noise and speakers to produce counteracting sound waves. Signal processing algorithms analyze noise patterns and generate appropriate cancellation signals in real-time, effectively reducing the perceived noise level during robot movement.Expand Specific Solutions05 Sensor-based noise monitoring and feedback control
Integrated sensor systems that continuously monitor noise levels during humanoid robot operation and provide feedback for adaptive control. These systems employ acoustic sensors, accelerometers, and force sensors to detect and characterize noise sources. The collected data is processed to identify problematic motion patterns and trigger corrective actions through modified control parameters or maintenance alerts.Expand Specific Solutions
Key Players in Quiet Humanoid Robot Development
The humanoid locomotion noise reduction technology sector represents an emerging market at the intersection of robotics and advanced motion control systems. The industry is currently in its early development stage, with significant growth potential driven by increasing demand for sophisticated humanoid robots across service, entertainment, and industrial applications. Market size remains relatively modest but is expanding rapidly as technological barriers are progressively overcome.
Technology maturity varies considerably among market participants. Established technology giants like Samsung Electronics, Sony Group, and Intel Corp. leverage their extensive R&D capabilities and semiconductor expertise to develop advanced noise reduction algorithms and hardware solutions. Specialized robotics companies such as UBTECH Robotics Corp. focus specifically on humanoid robot development, while automotive leaders like Honda Motor and BMW contribute motion control innovations from their robotics divisions. Chinese companies including Ping An Technology and various semiconductor firms like Amicro Semiconductor are emerging as significant contributors, particularly in AI-driven noise reduction techniques. The competitive landscape shows a mix of mature multinational corporations and innovative startups, indicating a technology sector transitioning from research-focused to commercially viable applications.
Technology maturity varies considerably among market participants. Established technology giants like Samsung Electronics, Sony Group, and Intel Corp. leverage their extensive R&D capabilities and semiconductor expertise to develop advanced noise reduction algorithms and hardware solutions. Specialized robotics companies such as UBTECH Robotics Corp. focus specifically on humanoid robot development, while automotive leaders like Honda Motor and BMW contribute motion control innovations from their robotics divisions. Chinese companies including Ping An Technology and various semiconductor firms like Amicro Semiconductor are emerging as significant contributors, particularly in AI-driven noise reduction techniques. The competitive landscape shows a mix of mature multinational corporations and innovative startups, indicating a technology sector transitioning from research-focused to commercially viable applications.
Sony Group Corp.
Technical Solution: Sony has developed noise reduction technologies for humanoid locomotion through their robotics research division, focusing on advanced sensor technologies and signal processing algorithms. Their approach integrates high-precision MEMS sensors with sophisticated filtering algorithms to reduce noise in motion detection and balance control systems. Sony's technology utilizes adaptive filtering techniques that can distinguish between intentional movement signals and noise interference, employing frequency domain analysis and spectral filtering methods to clean locomotion control signals. The company's expertise in audio and video signal processing has been adapted for robotics applications, creating multi-modal sensor fusion systems that combine visual, auditory, and inertial sensor data to achieve more robust noise reduction in humanoid walking algorithms and improve overall locomotion stability.
Strengths: Advanced sensor technology expertise, strong signal processing capabilities, multi-modal sensor integration. Weaknesses: Limited focus on humanoid robotics compared to other business segments, less specialized robotics experience.
UBTECH Robotics Corp. Ltd.
Technical Solution: UBTECH has developed comprehensive noise reduction solutions for humanoid locomotion through their Walker series robots, implementing multi-layered filtering systems and advanced servo control technologies. Their approach combines hardware-level noise suppression using high-precision servo motors with software-based filtering algorithms that process motion control signals in real-time. The company utilizes machine learning algorithms to adaptively reduce noise patterns in locomotion data, employing neural network-based filtering techniques that learn from walking patterns to minimize disturbances. UBTECH's proprietary motion control system incorporates vibration dampening mechanisms and intelligent gait planning algorithms that optimize step sequences to reduce mechanical noise and improve walking stability in various environmental conditions.
Strengths: Strong focus on consumer humanoid robots, cost-effective solutions, integrated hardware-software approach. Weaknesses: Limited research depth compared to established robotics companies, smaller scale of operations.
Core Technologies in Locomotion Noise Suppression
Control device, mobile body, and control method
PatentWO2021060166A1
Innovation
- A control device and method that acquires external world information to adjust the characteristics of the contact portion of the legs, allowing the contact sound between the leg and the environment to be modified, thereby reducing the landing sound based on environmental conditions and human presence.




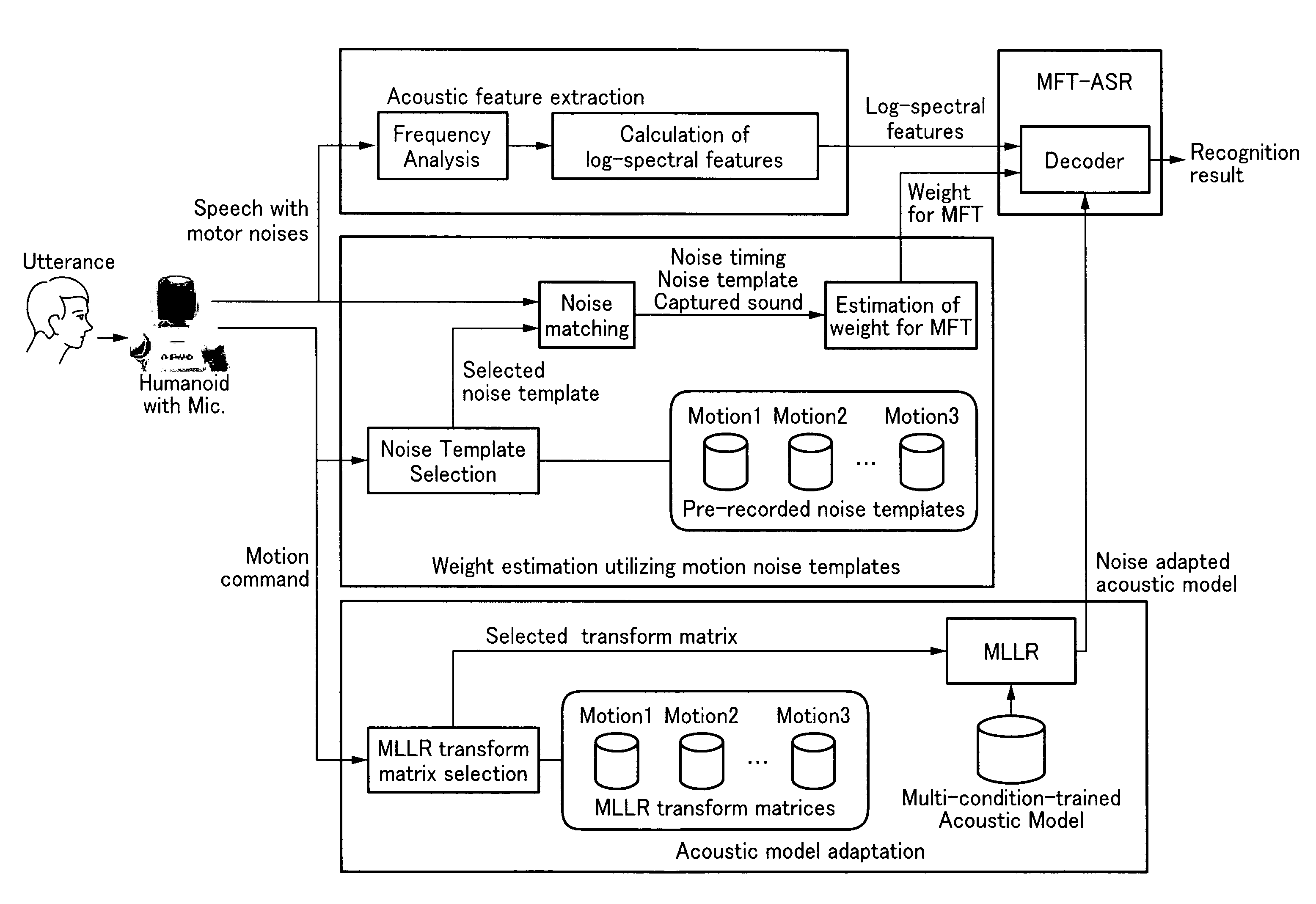
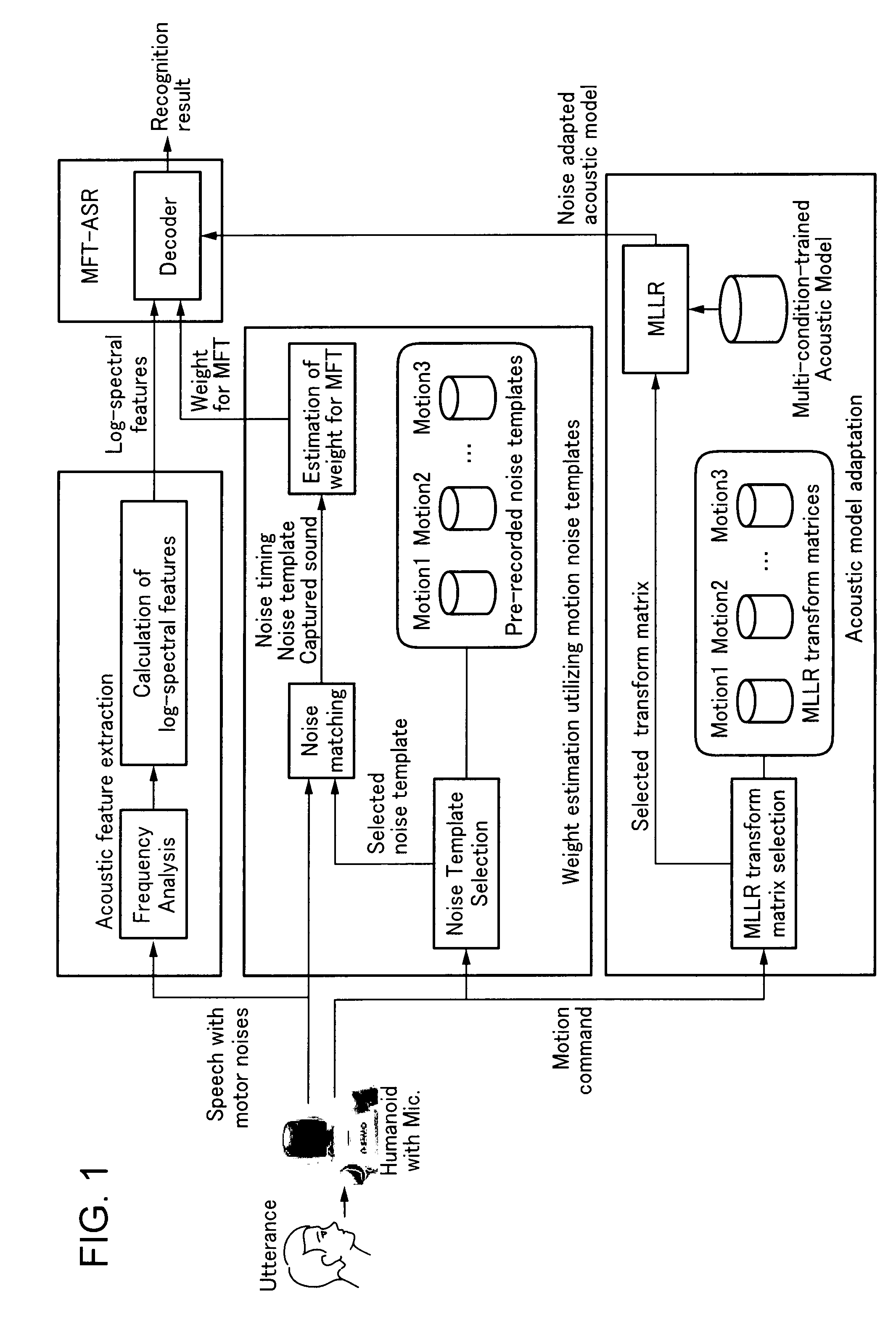
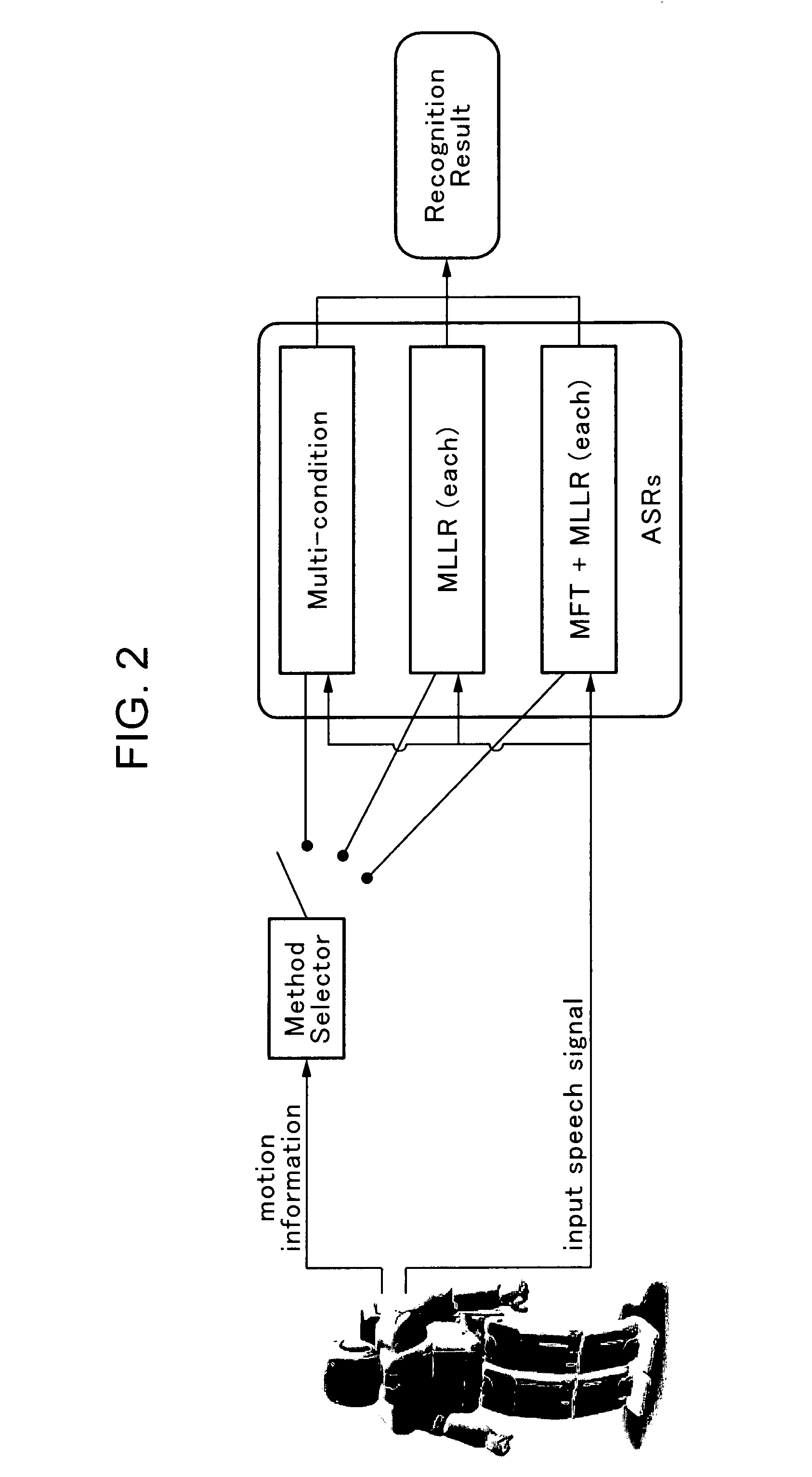
Speech recognition method for robot under motor noise thereof
PatentInactiveUS20080071540A1
Innovation
- A method combining multi-condition training, maximum-likelihood linear regression (MLLR), and missing feature theory (MFT) is proposed, where the robot selectively applies these techniques based on the type of motion or gesture to estimate and suppress motor noise, using pre-recorded noise templates to improve speech recognition accuracy.

Safety Standards for Humanoid Robot Noise Levels
The establishment of comprehensive safety standards for humanoid robot noise levels represents a critical regulatory framework essential for the widespread deployment of these advanced systems in human-centric environments. Current international standards primarily draw from existing industrial robotics guidelines, yet humanoid robots operating in close proximity to humans require significantly more stringent acoustic regulations.
The International Organization for Standardization (ISO) has initiated preliminary frameworks under ISO 10218 extensions, proposing maximum permissible noise levels of 55 dB(A) for continuous operation in residential environments and 65 dB(A) for commercial applications. These thresholds align with World Health Organization recommendations for preventing hearing damage and psychological stress in prolonged exposure scenarios.
Regulatory bodies across major markets have begun implementing region-specific requirements. The European Union's Machinery Directive 2006/42/EC now includes provisions for humanoid systems, mandating noise emission declarations and establishing liability frameworks for manufacturers. Similarly, the U.S. Occupational Safety and Health Administration (OSHA) has proposed amendments to existing workplace noise standards, specifically addressing human-robot collaborative environments where traditional 85 dB(A) thresholds prove inadequate.
Measurement protocols for humanoid robot noise assessment have evolved beyond conventional industrial standards. The emerging IEC 61672 adaptations require multi-point acoustic measurements during various locomotion modes, including walking, running, and transitional movements. These protocols mandate testing under standardized surface conditions and environmental parameters to ensure reproducible results across different operational contexts.
Compliance verification mechanisms increasingly incorporate real-time monitoring capabilities, requiring embedded acoustic sensors within humanoid systems. This approach enables continuous noise level assessment and automatic operational adjustments to maintain regulatory compliance. Certification processes now demand comprehensive acoustic mapping throughout the robot's operational envelope, establishing clear performance boundaries for different environmental conditions and ensuring consistent adherence to established safety thresholds.
The International Organization for Standardization (ISO) has initiated preliminary frameworks under ISO 10218 extensions, proposing maximum permissible noise levels of 55 dB(A) for continuous operation in residential environments and 65 dB(A) for commercial applications. These thresholds align with World Health Organization recommendations for preventing hearing damage and psychological stress in prolonged exposure scenarios.
Regulatory bodies across major markets have begun implementing region-specific requirements. The European Union's Machinery Directive 2006/42/EC now includes provisions for humanoid systems, mandating noise emission declarations and establishing liability frameworks for manufacturers. Similarly, the U.S. Occupational Safety and Health Administration (OSHA) has proposed amendments to existing workplace noise standards, specifically addressing human-robot collaborative environments where traditional 85 dB(A) thresholds prove inadequate.
Measurement protocols for humanoid robot noise assessment have evolved beyond conventional industrial standards. The emerging IEC 61672 adaptations require multi-point acoustic measurements during various locomotion modes, including walking, running, and transitional movements. These protocols mandate testing under standardized surface conditions and environmental parameters to ensure reproducible results across different operational contexts.
Compliance verification mechanisms increasingly incorporate real-time monitoring capabilities, requiring embedded acoustic sensors within humanoid systems. This approach enables continuous noise level assessment and automatic operational adjustments to maintain regulatory compliance. Certification processes now demand comprehensive acoustic mapping throughout the robot's operational envelope, establishing clear performance boundaries for different environmental conditions and ensuring consistent adherence to established safety thresholds.
Environmental Impact of Humanoid Robot Deployment
The deployment of humanoid robots equipped with advanced locomotion systems presents multifaceted environmental implications that extend beyond immediate operational considerations. As these sophisticated machines integrate noise reduction technologies, their environmental footprint encompasses both direct and indirect impacts across manufacturing, operational, and end-of-life phases.
Energy consumption represents a primary environmental concern in humanoid robot deployment. Advanced noise reduction techniques, including active damping systems, sophisticated control algorithms, and precision actuators, typically require substantial computational power and energy resources. The continuous operation of sensor arrays, real-time processing units, and adaptive control mechanisms contributes to increased electricity demand, potentially straining power grids and increasing carbon emissions depending on regional energy sources.
Manufacturing processes for noise-reduced humanoid robots involve complex materials and components that carry significant environmental implications. High-precision actuators, advanced composite materials for vibration dampening, and specialized sensors require energy-intensive production methods. The extraction and processing of rare earth elements for sophisticated control systems and the manufacturing of precision mechanical components contribute to resource depletion and industrial pollution.
Operational deployment scenarios significantly influence environmental impact patterns. Indoor applications in controlled environments typically generate lower environmental stress compared to outdoor deployments where robots must adapt to varying terrain conditions. The frequency and intensity of locomotion activities directly correlate with energy consumption and component wear, affecting both immediate power requirements and long-term maintenance needs.
Waste generation and disposal challenges emerge as critical considerations for large-scale humanoid robot deployment. The complex integration of electronic components, mechanical systems, and specialized materials creates unique recycling challenges. Advanced noise reduction components often contain non-biodegradable materials and electronic waste that require specialized disposal methods to prevent environmental contamination.
The cumulative environmental impact of widespread humanoid robot deployment necessitates comprehensive lifecycle assessment approaches. While individual units may demonstrate relatively modest environmental footprints, large-scale deployment scenarios could generate significant aggregate impacts requiring careful environmental management strategies and sustainable design considerations throughout the development and deployment process.
Energy consumption represents a primary environmental concern in humanoid robot deployment. Advanced noise reduction techniques, including active damping systems, sophisticated control algorithms, and precision actuators, typically require substantial computational power and energy resources. The continuous operation of sensor arrays, real-time processing units, and adaptive control mechanisms contributes to increased electricity demand, potentially straining power grids and increasing carbon emissions depending on regional energy sources.
Manufacturing processes for noise-reduced humanoid robots involve complex materials and components that carry significant environmental implications. High-precision actuators, advanced composite materials for vibration dampening, and specialized sensors require energy-intensive production methods. The extraction and processing of rare earth elements for sophisticated control systems and the manufacturing of precision mechanical components contribute to resource depletion and industrial pollution.
Operational deployment scenarios significantly influence environmental impact patterns. Indoor applications in controlled environments typically generate lower environmental stress compared to outdoor deployments where robots must adapt to varying terrain conditions. The frequency and intensity of locomotion activities directly correlate with energy consumption and component wear, affecting both immediate power requirements and long-term maintenance needs.
Waste generation and disposal challenges emerge as critical considerations for large-scale humanoid robot deployment. The complex integration of electronic components, mechanical systems, and specialized materials creates unique recycling challenges. Advanced noise reduction components often contain non-biodegradable materials and electronic waste that require specialized disposal methods to prevent environmental contamination.
The cumulative environmental impact of widespread humanoid robot deployment necessitates comprehensive lifecycle assessment approaches. While individual units may demonstrate relatively modest environmental footprints, large-scale deployment scenarios could generate significant aggregate impacts requiring careful environmental management strategies and sustainable design considerations throughout the development and deployment process.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!