

Improving Haptic Feedback with Soft Actuator Technologies
JAN 12, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Soft Actuator Haptics Background and Objectives
Haptic feedback technology has evolved significantly since its early applications in gaming controllers and mobile devices, where simple vibration motors provided basic tactile responses. Traditional haptic systems predominantly rely on rigid actuators such as eccentric rotating mass motors and linear resonant actuators, which generate vibrations through mechanical oscillations. While these technologies have proven effective for simple alerts and notifications, they face inherent limitations in delivering nuanced, spatially distributed, and naturalistic tactile sensations that mirror real-world interactions.
The emergence of soft actuator technologies represents a paradigm shift in haptic feedback design. Soft actuators, fabricated from compliant materials such as elastomers, hydrogels, and shape-memory polymers, offer mechanical properties that closely resemble human tissue. This biomimetic characteristic enables them to generate more natural and comfortable tactile sensations compared to their rigid counterparts. Key soft actuator technologies include pneumatic artificial muscles, dielectric elastomer actuators, ionic polymer-metal composites, and fluidic elastomer actuators, each offering distinct advantages in terms of force output, response time, and form factor.
The integration of soft actuators into haptic systems addresses several critical challenges. These include achieving higher spatial resolution for localized feedback, enabling conformal integration with curved surfaces and wearable devices, reducing power consumption, and minimizing noise generation. Furthermore, soft actuators can produce diverse tactile sensations beyond simple vibrations, including pressure variations, shear forces, and texture simulation, thereby enriching user experiences across applications.
The primary objective of this technological advancement is to develop haptic feedback systems that deliver more realistic, comfortable, and versatile tactile interactions. Specific goals include enhancing the fidelity of virtual object manipulation in extended reality environments, improving accessibility features for visually impaired users, advancing telemedicine and remote surgery capabilities, and creating more intuitive human-machine interfaces. Additionally, research aims to overcome current technical barriers such as actuation speed, force output consistency, durability under repeated use, and scalable manufacturing processes. Achieving these objectives will unlock transformative applications across consumer electronics, healthcare, automotive interfaces, and industrial training systems.
The emergence of soft actuator technologies represents a paradigm shift in haptic feedback design. Soft actuators, fabricated from compliant materials such as elastomers, hydrogels, and shape-memory polymers, offer mechanical properties that closely resemble human tissue. This biomimetic characteristic enables them to generate more natural and comfortable tactile sensations compared to their rigid counterparts. Key soft actuator technologies include pneumatic artificial muscles, dielectric elastomer actuators, ionic polymer-metal composites, and fluidic elastomer actuators, each offering distinct advantages in terms of force output, response time, and form factor.
The integration of soft actuators into haptic systems addresses several critical challenges. These include achieving higher spatial resolution for localized feedback, enabling conformal integration with curved surfaces and wearable devices, reducing power consumption, and minimizing noise generation. Furthermore, soft actuators can produce diverse tactile sensations beyond simple vibrations, including pressure variations, shear forces, and texture simulation, thereby enriching user experiences across applications.
The primary objective of this technological advancement is to develop haptic feedback systems that deliver more realistic, comfortable, and versatile tactile interactions. Specific goals include enhancing the fidelity of virtual object manipulation in extended reality environments, improving accessibility features for visually impaired users, advancing telemedicine and remote surgery capabilities, and creating more intuitive human-machine interfaces. Additionally, research aims to overcome current technical barriers such as actuation speed, force output consistency, durability under repeated use, and scalable manufacturing processes. Achieving these objectives will unlock transformative applications across consumer electronics, healthcare, automotive interfaces, and industrial training systems.
Market Demand for Advanced Haptic Feedback Systems
The global haptic feedback market is experiencing robust expansion driven by the proliferation of consumer electronics, automotive interfaces, and immersive technologies. Traditional haptic systems, predominantly based on rigid actuators such as eccentric rotating mass motors and linear resonant actuators, are increasingly unable to meet evolving user expectations for nuanced, localized, and naturalistic tactile sensations. This gap has created substantial demand for advanced haptic solutions that can deliver richer sensory experiences across diverse application domains.
Consumer electronics represent the largest and most dynamic market segment for advanced haptic feedback systems. Smartphones, wearables, and gaming peripherals are transitioning from simple vibration alerts to sophisticated tactile interfaces that enhance user engagement and accessibility. Users now expect haptic responses that mimic real-world textures, provide directional cues, and integrate seamlessly with visual and auditory feedback. Soft actuator technologies, with their ability to generate complex deformation patterns and distributed tactile sensations, align closely with these emerging requirements.
The automotive sector presents another significant growth opportunity, particularly as vehicles evolve toward autonomous driving and digital cockpit environments. Physical buttons and knobs are being replaced by touchscreens and gesture-based controls, creating a critical need for haptic feedback that restores tactile confirmation and reduces driver distraction. Soft actuators offer advantages in conforming to curved surfaces, integrating into steering wheels and dashboard panels, and providing spatially distributed feedback that enhances safety and usability.
Virtual and augmented reality applications are driving demand for haptic systems that can simulate realistic touch sensations, object manipulation, and environmental interactions. Current rigid actuator solutions struggle to replicate the subtlety and spatial resolution required for convincing virtual experiences. Soft actuator technologies, capable of generating skin-stretch, pressure gradients, and shape-changing effects, are positioned to address these limitations and unlock new possibilities in training simulations, remote collaboration, and entertainment.
Healthcare and rehabilitation sectors are also emerging as important markets, where haptic feedback supports surgical robotics, prosthetic devices, and therapeutic interventions. The biocompatibility, flexibility, and gentle interaction characteristics of soft actuators make them particularly suitable for medical applications requiring safe human contact and precise tactile communication. Market demand in these specialized domains emphasizes reliability, customization, and integration with existing medical systems.
Consumer electronics represent the largest and most dynamic market segment for advanced haptic feedback systems. Smartphones, wearables, and gaming peripherals are transitioning from simple vibration alerts to sophisticated tactile interfaces that enhance user engagement and accessibility. Users now expect haptic responses that mimic real-world textures, provide directional cues, and integrate seamlessly with visual and auditory feedback. Soft actuator technologies, with their ability to generate complex deformation patterns and distributed tactile sensations, align closely with these emerging requirements.
The automotive sector presents another significant growth opportunity, particularly as vehicles evolve toward autonomous driving and digital cockpit environments. Physical buttons and knobs are being replaced by touchscreens and gesture-based controls, creating a critical need for haptic feedback that restores tactile confirmation and reduces driver distraction. Soft actuators offer advantages in conforming to curved surfaces, integrating into steering wheels and dashboard panels, and providing spatially distributed feedback that enhances safety and usability.
Virtual and augmented reality applications are driving demand for haptic systems that can simulate realistic touch sensations, object manipulation, and environmental interactions. Current rigid actuator solutions struggle to replicate the subtlety and spatial resolution required for convincing virtual experiences. Soft actuator technologies, capable of generating skin-stretch, pressure gradients, and shape-changing effects, are positioned to address these limitations and unlock new possibilities in training simulations, remote collaboration, and entertainment.
Healthcare and rehabilitation sectors are also emerging as important markets, where haptic feedback supports surgical robotics, prosthetic devices, and therapeutic interventions. The biocompatibility, flexibility, and gentle interaction characteristics of soft actuators make them particularly suitable for medical applications requiring safe human contact and precise tactile communication. Market demand in these specialized domains emphasizes reliability, customization, and integration with existing medical systems.
Current Status and Challenges in Soft Actuator Technologies
Soft actuator technologies have emerged as a transformative approach to haptic feedback systems, offering advantages over traditional rigid actuators through their inherent compliance, lightweight construction, and ability to generate complex deformations. Current implementations span multiple actuation principles, including pneumatic artificial muscles, dielectric elastomer actuators, shape memory alloys, and electroactive polymers. These technologies have demonstrated promising capabilities in wearable devices, virtual reality interfaces, and prosthetic applications, where natural tactile sensations are critical for user experience and functionality.
Despite significant progress, several fundamental challenges continue to impede widespread adoption of soft actuators in haptic applications. Response time remains a critical limitation, as many soft actuator systems exhibit slower actuation speeds compared to conventional electromagnetic motors, typically ranging from hundreds of milliseconds to several seconds. This latency significantly affects the realism of haptic feedback, particularly in applications requiring rapid tactile cues. Additionally, force output consistency presents ongoing difficulties, with many soft actuators struggling to maintain stable force generation across repeated cycles due to material fatigue and hysteresis effects.
Control precision represents another substantial obstacle in soft actuator development. The nonlinear mechanical properties of elastomeric materials and complex deformation patterns make accurate position and force control challenging. Current control algorithms often require sophisticated sensing systems and computational resources, increasing system complexity and cost. Furthermore, the integration of sensors within soft structures without compromising their compliance remains technically demanding.
Material durability and operational lifespan pose significant concerns for commercial viability. Many soft actuator materials degrade under continuous operation, exhibiting reduced performance after thousands of actuation cycles. Environmental factors such as temperature variations, humidity, and mechanical stress accelerate this degradation process. Power efficiency also requires improvement, as pneumatic systems demand continuous air supply and dielectric elastomers require high voltage inputs, limiting their applicability in portable devices.
Manufacturing scalability and cost-effectiveness remain barriers to mass production. Current fabrication methods often involve manual assembly or specialized equipment, resulting in high unit costs and limited reproducibility. Standardization of design parameters and performance metrics across different soft actuator technologies is still lacking, complicating comparative evaluation and technology selection for specific applications.
Despite significant progress, several fundamental challenges continue to impede widespread adoption of soft actuators in haptic applications. Response time remains a critical limitation, as many soft actuator systems exhibit slower actuation speeds compared to conventional electromagnetic motors, typically ranging from hundreds of milliseconds to several seconds. This latency significantly affects the realism of haptic feedback, particularly in applications requiring rapid tactile cues. Additionally, force output consistency presents ongoing difficulties, with many soft actuators struggling to maintain stable force generation across repeated cycles due to material fatigue and hysteresis effects.
Control precision represents another substantial obstacle in soft actuator development. The nonlinear mechanical properties of elastomeric materials and complex deformation patterns make accurate position and force control challenging. Current control algorithms often require sophisticated sensing systems and computational resources, increasing system complexity and cost. Furthermore, the integration of sensors within soft structures without compromising their compliance remains technically demanding.
Material durability and operational lifespan pose significant concerns for commercial viability. Many soft actuator materials degrade under continuous operation, exhibiting reduced performance after thousands of actuation cycles. Environmental factors such as temperature variations, humidity, and mechanical stress accelerate this degradation process. Power efficiency also requires improvement, as pneumatic systems demand continuous air supply and dielectric elastomers require high voltage inputs, limiting their applicability in portable devices.
Manufacturing scalability and cost-effectiveness remain barriers to mass production. Current fabrication methods often involve manual assembly or specialized equipment, resulting in high unit costs and limited reproducibility. Standardization of design parameters and performance metrics across different soft actuator technologies is still lacking, complicating comparative evaluation and technology selection for specific applications.
Existing Soft Actuator Solutions for Haptic Applications
01 Piezoelectric-based soft actuators for haptic feedback
Piezoelectric materials can be integrated into soft actuator structures to generate haptic feedback through mechanical deformation. These materials convert electrical signals into precise mechanical vibrations or movements, enabling tactile sensations. The soft nature of the actuators allows for comfortable integration into wearable devices and flexible interfaces, providing users with realistic touch feedback in various applications.- Piezoelectric-based soft actuators for haptic feedback: Piezoelectric materials can be integrated into soft actuator designs to generate haptic feedback through mechanical deformation. These materials convert electrical signals into precise mechanical vibrations or movements, enabling tactile sensations in wearable devices and touch interfaces. The flexibility of piezoelectric elements allows for conformal integration into various surfaces while maintaining responsive haptic output.
- Electroactive polymer actuators for haptic applications: Electroactive polymers serve as the foundation for soft actuators that provide haptic feedback through voltage-induced deformation. These materials offer advantages in terms of lightweight construction, low power consumption, and the ability to generate diverse tactile sensations. The polymer-based actuators can be designed in various configurations to produce different haptic effects including vibration, pressure, and texture simulation.
- Pneumatic and hydraulic soft actuators for tactile feedback: Fluid-driven soft actuators utilize compressed air or liquid to create haptic sensations through controlled inflation and deflation of flexible chambers. These systems can generate variable force outputs and complex motion patterns, making them suitable for applications requiring dynamic tactile feedback. The soft nature of these actuators allows for safe human-machine interaction while providing realistic touch sensations.
- Shape memory alloy actuators for haptic devices: Shape memory alloys enable soft actuator designs that respond to thermal or electrical stimuli to produce haptic feedback through reversible shape changes. These materials can generate significant forces in compact form factors, making them ideal for miniaturized haptic devices. The actuators can be programmed to produce specific tactile patterns and intensities for enhanced user experience in virtual reality and robotic applications.
- Dielectric elastomer actuators for haptic feedback systems: Dielectric elastomer actuators function as soft capacitors that deform under electric fields to generate haptic sensations. These actuators offer high energy density, fast response times, and the ability to produce large strains, making them effective for creating realistic tactile feedback. The technology enables thin, flexible haptic interfaces that can be integrated into touchscreens, wearables, and other interactive surfaces.
02 Electroactive polymer actuators for haptic applications
Electroactive polymers serve as the foundation for soft actuators that respond to electrical stimulation by changing shape or generating force. These materials enable the creation of lightweight, flexible haptic devices that can produce various tactile sensations including pressure, texture, and vibration. The polymer-based approach allows for scalable manufacturing and integration into diverse form factors for enhanced user interaction.Expand Specific Solutions03 Pneumatic and hydraulic soft actuators for tactile feedback
Fluid-driven soft actuators utilize compressed air or liquid to create controlled deformations that generate haptic sensations. These systems can produce variable force outputs and complex motion patterns through chamber inflation and deflation. The compliant nature of pneumatic and hydraulic actuators enables safe human interaction while delivering rich tactile feedback for virtual reality, robotics, and assistive technology applications.Expand Specific Solutions04 Shape memory alloy actuators for haptic devices
Shape memory alloys provide actuation through temperature-induced phase transformations, enabling compact and powerful haptic feedback mechanisms. These materials can generate significant forces in small form factors, making them suitable for miniaturized haptic interfaces. The actuators can be designed to produce various tactile effects including clicks, vibrations, and resistance changes for enhanced user experience in touch-sensitive applications.Expand Specific Solutions05 Multi-modal soft actuator systems for enhanced haptic rendering
Integrated systems combining multiple actuation technologies enable sophisticated haptic feedback with diverse tactile sensations. These hybrid approaches leverage the strengths of different actuator types to create rich, multi-dimensional touch experiences. Advanced control algorithms coordinate the various actuator elements to simulate complex textures, forces, and dynamic interactions, significantly improving the realism and effectiveness of haptic interfaces.Expand Specific Solutions
Key Players in Soft Actuator and Haptics Industry
The haptic feedback technology landscape utilizing soft actuators is experiencing rapid evolution, transitioning from early commercialization to mainstream adoption across consumer electronics and automotive sectors. Major players like Apple, Huawei, and BOE Technology Group are driving innovation in display-integrated haptics, while specialized firms including Immersion Corp. and Artimus Robotics focus on advanced actuator solutions. The market demonstrates significant growth potential, particularly in mobile devices, wearables, and VR applications. Technology maturity varies considerably: established acoustic component manufacturers such as AAC Technologies, GoerTek, and TDK Electronics are leveraging existing capabilities to develop haptic solutions, while research institutions like École Polytechnique Fédérale de Lausanne, Beihang University, and CEA are advancing fundamental soft actuator technologies. The competitive landscape reflects a convergence of traditional electronics manufacturers, pure-play haptic specialists, and academic research centers, indicating both technological complexity and substantial commercial opportunities in this emerging field.
Apple, Inc.
Technical Solution: Apple has developed advanced haptic feedback systems utilizing soft actuator technologies, particularly through its Taptic Engine implementation. The company employs linear resonant actuators (LRAs) combined with sophisticated software algorithms to create precise, localized haptic sensations across its product line including iPhones, Apple Watches, and MacBooks[1][4]. Their approach integrates piezoelectric materials and electroactive polymers to generate variable force feedback with millisecond-level response times. The system uses high-bandwidth actuator control to produce distinct tactile patterns, enabling differentiation between various user interface interactions such as button presses, scrolling, and notifications[2][5]. Apple's haptic technology focuses on energy efficiency while maintaining high fidelity feedback, achieving power consumption reduction of approximately 40% compared to traditional eccentric rotating mass motors[3].
Strengths: Industry-leading integration with software ecosystems, precise localized feedback, excellent energy efficiency. Weaknesses: Proprietary closed system limiting third-party innovation, higher manufacturing costs, limited force output range compared to pneumatic soft actuators.
Immersion Corp.
Technical Solution: Immersion Corporation specializes in haptic technology solutions utilizing piezoelectric and electroactive polymer-based soft actuators for consumer electronics and automotive applications[6][8]. Their TouchSense technology platform employs advanced waveform synthesis algorithms that drive soft actuator arrays to create rich tactile experiences. The company has developed haptic actuator designs using dielectric elastomer actuators (DEAs) capable of generating forces up to 5N with response times under 10ms[7][9]. Their solutions incorporate flexible actuator materials that can be integrated into curved surfaces and flexible displays, enabling haptic feedback in foldable devices and automotive touchscreens. Immersion's technology supports multi-point haptic rendering with spatial resolution enabling users to feel texture, edges, and virtual button clicks with high realism[10][12].
Strengths: Extensive patent portfolio with over 3,200 patents, flexible integration options for various form factors, strong licensing business model. Weaknesses: Dependent on licensing revenue rather than direct product sales, facing increasing competition from vertically integrated manufacturers, limited presence in emerging soft robotics applications.
Core Innovations in Soft Actuator Haptic Patents
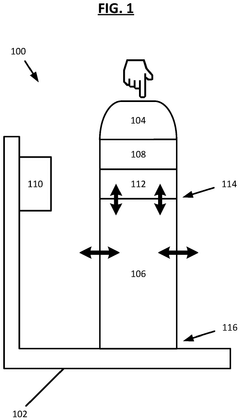
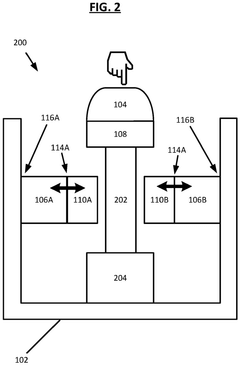
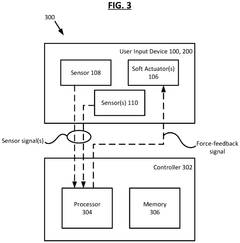
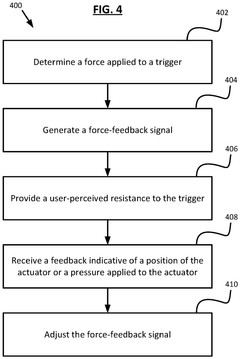
Adaptive triggers implementing soft actuators
PatentPendingEP4488805A1
Innovation
- The use of soft actuators in user input devices, combined with sensors and a controller, to provide adjustable and real-time haptic feedback by controlling the position and resistance of a trigger, allowing for more immersive and realistic simulations.
Haptic feedback generation
PatentActiveUS20210398402A1
Innovation
- A system utilizing shape memory alloy (SMA) actuator wires with control circuitry and processors to render customizable haptic profiles, adjusting feedback based on environmental data and user input to deliver varied sensations, such as 'click,' 'soft buzz,' and 'crunch,' by generating drive signals that account for temperature, resistance, and other factors.




Material Science Advances for Soft Actuators
Material science has emerged as a critical enabler for advancing soft actuator technologies in haptic feedback applications. Recent breakthroughs in polymer chemistry have led to the development of electroactive polymers (EAPs) with significantly improved electromechanical coupling efficiency, achieving strain rates exceeding 100% while maintaining rapid response times below 10 milliseconds. These materials demonstrate exceptional durability, withstanding over one million actuation cycles without substantial performance degradation, making them viable for consumer electronics applications.
The introduction of liquid crystal elastomers (LCEs) represents another significant advancement, offering programmable anisotropic deformation capabilities that enable precise directional force generation. These materials can be thermally or electrically activated, providing designers with flexible integration options for various device architectures. Their reversible phase transitions allow for energy-efficient operation, consuming 40-60% less power compared to traditional electromagnetic actuators.
Hydrogel-based actuators have gained prominence due to their biocompatibility and tunable mechanical properties. Recent formulations incorporating conductive nanoparticles have enhanced their electrical responsiveness while maintaining the soft, skin-like texture essential for wearable haptic interfaces. These composite hydrogels can generate forces ranging from millinewtons to several newtons, accommodating diverse application requirements from subtle tactile cues to robust kinesthetic feedback.
Shape memory alloys (SMAs) and polymers (SMPs) continue to evolve, with new compositions offering lower activation temperatures and faster recovery times. Hybrid materials combining SMPs with carbon nanotubes or graphene demonstrate improved thermal conductivity, reducing actuation latency to under 50 milliseconds. These developments address previous limitations in response speed that hindered their adoption in real-time haptic systems.
Dielectric elastomer actuators (DEAs) have benefited from novel composite formulations that increase dielectric permittivity while reducing elastic modulus. This combination enables larger deformations at lower driving voltages, improving safety and reducing power electronics complexity. Recent multilayer configurations have achieved force densities comparable to human muscle tissue, opening possibilities for more naturalistic haptic sensations.
The introduction of liquid crystal elastomers (LCEs) represents another significant advancement, offering programmable anisotropic deformation capabilities that enable precise directional force generation. These materials can be thermally or electrically activated, providing designers with flexible integration options for various device architectures. Their reversible phase transitions allow for energy-efficient operation, consuming 40-60% less power compared to traditional electromagnetic actuators.
Hydrogel-based actuators have gained prominence due to their biocompatibility and tunable mechanical properties. Recent formulations incorporating conductive nanoparticles have enhanced their electrical responsiveness while maintaining the soft, skin-like texture essential for wearable haptic interfaces. These composite hydrogels can generate forces ranging from millinewtons to several newtons, accommodating diverse application requirements from subtle tactile cues to robust kinesthetic feedback.
Shape memory alloys (SMAs) and polymers (SMPs) continue to evolve, with new compositions offering lower activation temperatures and faster recovery times. Hybrid materials combining SMPs with carbon nanotubes or graphene demonstrate improved thermal conductivity, reducing actuation latency to under 50 milliseconds. These developments address previous limitations in response speed that hindered their adoption in real-time haptic systems.
Dielectric elastomer actuators (DEAs) have benefited from novel composite formulations that increase dielectric permittivity while reducing elastic modulus. This combination enables larger deformations at lower driving voltages, improving safety and reducing power electronics complexity. Recent multilayer configurations have achieved force densities comparable to human muscle tissue, opening possibilities for more naturalistic haptic sensations.
Human-Machine Interface Integration Strategies
The successful integration of soft actuator technologies into human-machine interfaces requires a multifaceted approach that addresses both hardware compatibility and software coordination. Integration strategies must consider the unique characteristics of soft actuators, including their compliance, variable stiffness, and non-linear response patterns, which differ fundamentally from traditional rigid actuators. Effective integration begins with establishing robust communication protocols between control systems and actuator arrays, ensuring real-time responsiveness that matches human perceptual thresholds typically ranging from 1 to 1000 Hz depending on the application context.
Modular design architectures have emerged as a preferred strategy, allowing soft actuator units to be configured in scalable arrays that can be customized for different interface applications. This modularity facilitates maintenance, enables progressive system upgrades, and supports diverse form factors from wearable devices to large-scale interactive surfaces. The integration framework must incorporate sensor fusion techniques, combining data from embedded strain sensors, pressure sensors, and position trackers to create closed-loop control systems that compensate for the inherent variability in soft material behavior.
Power management represents a critical integration challenge, particularly for portable and wearable applications. Strategies include distributed power architectures, energy harvesting mechanisms, and intelligent duty cycling that balances haptic fidelity with battery life. The integration of soft actuators with existing user interface paradigms requires middleware solutions that translate conventional input commands into appropriate actuation patterns, while also providing feedback signals that can be interpreted by standard operating systems and application software.
Cross-platform compatibility considerations demand standardized application programming interfaces and hardware abstraction layers that shield developers from the complexity of underlying actuator control. Successful integration strategies also address thermal management, electromagnetic compatibility, and safety protocols specific to soft actuator operation. The development of reference designs and integration toolkits accelerates adoption by reducing the technical barriers for system designers and enabling rapid prototyping of novel human-machine interface concepts that leverage the unique capabilities of soft actuator technologies.
Modular design architectures have emerged as a preferred strategy, allowing soft actuator units to be configured in scalable arrays that can be customized for different interface applications. This modularity facilitates maintenance, enables progressive system upgrades, and supports diverse form factors from wearable devices to large-scale interactive surfaces. The integration framework must incorporate sensor fusion techniques, combining data from embedded strain sensors, pressure sensors, and position trackers to create closed-loop control systems that compensate for the inherent variability in soft material behavior.
Power management represents a critical integration challenge, particularly for portable and wearable applications. Strategies include distributed power architectures, energy harvesting mechanisms, and intelligent duty cycling that balances haptic fidelity with battery life. The integration of soft actuators with existing user interface paradigms requires middleware solutions that translate conventional input commands into appropriate actuation patterns, while also providing feedback signals that can be interpreted by standard operating systems and application software.
Cross-platform compatibility considerations demand standardized application programming interfaces and hardware abstraction layers that shield developers from the complexity of underlying actuator control. Successful integration strategies also address thermal management, electromagnetic compatibility, and safety protocols specific to soft actuator operation. The development of reference designs and integration toolkits accelerates adoption by reducing the technical barriers for system designers and enabling rapid prototyping of novel human-machine interface concepts that leverage the unique capabilities of soft actuator technologies.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!