

Optimize Variable Stiffness Actuators for Robotics Precision
APR 22, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Variable Stiffness Actuator Development Background and Objectives
Variable stiffness actuators represent a paradigm shift in robotics technology, emerging from the fundamental limitation of traditional rigid actuators in achieving both precision and adaptability. The development of VSAs traces back to biological inspiration, where natural systems demonstrate remarkable ability to modulate muscle stiffness for optimal performance across diverse tasks. Early research in the 1990s focused on understanding how biological systems achieve variable compliance, leading to the first mechanical implementations in the early 2000s.
The evolution of VSA technology has been driven by the growing demand for robots that can safely interact with humans and operate in unstructured environments. Traditional industrial robots, designed for high precision and repeatability in controlled settings, proved inadequate for applications requiring physical human-robot interaction, delicate manipulation tasks, and adaptive responses to environmental uncertainties. This gap highlighted the need for actuators capable of real-time stiffness modulation.
Current technological trends indicate a convergence toward more sophisticated control algorithms, advanced materials integration, and miniaturization of VSA systems. The integration of smart materials, such as shape memory alloys and magnetorheological fluids, has opened new possibilities for achieving variable stiffness without complex mechanical arrangements. Additionally, advances in sensor technology and computational power have enabled more precise real-time control of stiffness parameters.
The primary objective of optimizing VSAs for robotics precision centers on achieving seamless transitions between compliant and rigid states while maintaining positional accuracy. This involves developing control strategies that can predict optimal stiffness settings based on task requirements, environmental conditions, and safety considerations. Key performance metrics include response time for stiffness changes, energy efficiency, and the range of achievable stiffness values.
Future development goals encompass creating VSAs with higher power-to-weight ratios, improved durability under cyclic loading, and enhanced integration capabilities with existing robotic platforms. The ultimate vision involves actuators that can autonomously adapt their mechanical properties in real-time, enabling robots to perform complex manipulation tasks with human-like dexterity while ensuring safety and precision in collaborative environments.
The evolution of VSA technology has been driven by the growing demand for robots that can safely interact with humans and operate in unstructured environments. Traditional industrial robots, designed for high precision and repeatability in controlled settings, proved inadequate for applications requiring physical human-robot interaction, delicate manipulation tasks, and adaptive responses to environmental uncertainties. This gap highlighted the need for actuators capable of real-time stiffness modulation.
Current technological trends indicate a convergence toward more sophisticated control algorithms, advanced materials integration, and miniaturization of VSA systems. The integration of smart materials, such as shape memory alloys and magnetorheological fluids, has opened new possibilities for achieving variable stiffness without complex mechanical arrangements. Additionally, advances in sensor technology and computational power have enabled more precise real-time control of stiffness parameters.
The primary objective of optimizing VSAs for robotics precision centers on achieving seamless transitions between compliant and rigid states while maintaining positional accuracy. This involves developing control strategies that can predict optimal stiffness settings based on task requirements, environmental conditions, and safety considerations. Key performance metrics include response time for stiffness changes, energy efficiency, and the range of achievable stiffness values.
Future development goals encompass creating VSAs with higher power-to-weight ratios, improved durability under cyclic loading, and enhanced integration capabilities with existing robotic platforms. The ultimate vision involves actuators that can autonomously adapt their mechanical properties in real-time, enabling robots to perform complex manipulation tasks with human-like dexterity while ensuring safety and precision in collaborative environments.
Market Demand for Precision Robotics Applications
The precision robotics market is experiencing unprecedented growth driven by increasing automation demands across multiple industrial sectors. Manufacturing industries are transitioning toward higher precision requirements, particularly in electronics assembly, automotive component production, and aerospace manufacturing. These applications require actuators capable of delivering sub-millimeter positioning accuracy while maintaining consistent performance under varying load conditions.
Medical robotics represents one of the most demanding segments for variable stiffness actuators. Surgical robots require exceptional precision for minimally invasive procedures, where positioning errors measured in micrometers can significantly impact patient outcomes. The growing adoption of robotic-assisted surgery, rehabilitation robotics, and prosthetic devices creates substantial demand for actuators that can adapt their stiffness characteristics in real-time while maintaining precise control.
The semiconductor and electronics manufacturing sector drives significant demand for precision robotics applications. Pick-and-place operations, wafer handling, and component assembly require actuators that can handle delicate materials with varying weights and fragility levels. Variable stiffness actuators offer the adaptability needed to manage different components within the same production line, from lightweight microchips to heavier circuit boards.
Emerging applications in collaborative robotics are reshaping market requirements. Cobots working alongside humans need actuators that can instantly adjust stiffness for safety while maintaining precision during task execution. This dual requirement for safety compliance and operational accuracy creates unique market opportunities for advanced variable stiffness solutions.
The aerospace and defense sectors present specialized demands for precision robotics. Satellite deployment mechanisms, aircraft assembly robots, and unmanned vehicle systems require actuators that maintain precision across extreme temperature ranges and varying gravitational conditions. These applications often justify premium pricing for actuators that meet stringent reliability and performance standards.
Market growth is further accelerated by the miniaturization trend in consumer electronics and the increasing complexity of automated quality inspection systems. These applications require compact actuators that deliver high precision without compromising on adaptability, driving innovation in variable stiffness actuator design and control algorithms.
Medical robotics represents one of the most demanding segments for variable stiffness actuators. Surgical robots require exceptional precision for minimally invasive procedures, where positioning errors measured in micrometers can significantly impact patient outcomes. The growing adoption of robotic-assisted surgery, rehabilitation robotics, and prosthetic devices creates substantial demand for actuators that can adapt their stiffness characteristics in real-time while maintaining precise control.
The semiconductor and electronics manufacturing sector drives significant demand for precision robotics applications. Pick-and-place operations, wafer handling, and component assembly require actuators that can handle delicate materials with varying weights and fragility levels. Variable stiffness actuators offer the adaptability needed to manage different components within the same production line, from lightweight microchips to heavier circuit boards.
Emerging applications in collaborative robotics are reshaping market requirements. Cobots working alongside humans need actuators that can instantly adjust stiffness for safety while maintaining precision during task execution. This dual requirement for safety compliance and operational accuracy creates unique market opportunities for advanced variable stiffness solutions.
The aerospace and defense sectors present specialized demands for precision robotics. Satellite deployment mechanisms, aircraft assembly robots, and unmanned vehicle systems require actuators that maintain precision across extreme temperature ranges and varying gravitational conditions. These applications often justify premium pricing for actuators that meet stringent reliability and performance standards.
Market growth is further accelerated by the miniaturization trend in consumer electronics and the increasing complexity of automated quality inspection systems. These applications require compact actuators that deliver high precision without compromising on adaptability, driving innovation in variable stiffness actuator design and control algorithms.
Current VSA Technology Status and Technical Challenges
Variable Stiffness Actuators have emerged as a critical technology in modern robotics, representing a significant advancement over traditional rigid actuators. Current VSA implementations primarily fall into three categories: mechanically variable stiffness systems, pneumatically controlled systems, and electromagnetically adjustable mechanisms. Leading commercial solutions include the DLR's FSJ actuators, which utilize antagonistic spring arrangements, and Awiwi's CompAct-VSA series that employs cam-based stiffness modulation.
The state-of-the-art VSA systems demonstrate stiffness variation ranges typically between 1:10 to 1:100 ratios, with response times ranging from 50 milliseconds to several seconds depending on the underlying mechanism. Most current implementations achieve position accuracy within ±0.1 degrees for high-precision applications, though this performance degrades significantly under varying load conditions. The bandwidth limitations of existing VSAs typically constrain operation to frequencies below 10 Hz for effective stiffness control.
Contemporary VSA designs face substantial technical challenges that limit their widespread adoption in precision robotics applications. The fundamental trade-off between stiffness range and actuator compactness remains unresolved, with most high-performance systems requiring significant additional mechanical complexity. Energy efficiency presents another critical constraint, as current VSAs typically consume 20-40% more power than equivalent fixed-stiffness actuators due to continuous stiffness regulation mechanisms.
Control system integration represents a major technical hurdle, particularly in achieving real-time stiffness adaptation while maintaining precise position control. The nonlinear dynamics introduced by variable stiffness create complex coupling effects between position and compliance control loops, leading to stability issues and reduced tracking accuracy. Current control algorithms struggle with the inherent time delays in stiffness adjustment mechanisms, resulting in suboptimal performance during rapid task transitions.
Manufacturing precision and repeatability pose additional challenges for VSA commercialization. The mechanical complexity of variable stiffness mechanisms introduces multiple sources of backlash, friction, and wear that degrade long-term performance consistency. Temperature sensitivity affects both mechanical components and control electronics, causing drift in stiffness characteristics that compromises precision applications.
Sensor integration limitations further constrain VSA performance, as most current systems lack adequate real-time feedback on actual stiffness states. The absence of reliable stiffness sensing forces reliance on open-loop control strategies that cannot compensate for mechanical variations or external disturbances. This limitation becomes particularly problematic in applications requiring precise force control or adaptive compliance behavior.
The scalability challenge affects both miniaturization for delicate manipulation tasks and scaling up for high-force applications. Current VSA technologies demonstrate limited success in achieving the size and weight constraints required for hand-held surgical robots or micro-manipulation systems while maintaining adequate stiffness variation ranges and control precision.
The state-of-the-art VSA systems demonstrate stiffness variation ranges typically between 1:10 to 1:100 ratios, with response times ranging from 50 milliseconds to several seconds depending on the underlying mechanism. Most current implementations achieve position accuracy within ±0.1 degrees for high-precision applications, though this performance degrades significantly under varying load conditions. The bandwidth limitations of existing VSAs typically constrain operation to frequencies below 10 Hz for effective stiffness control.
Contemporary VSA designs face substantial technical challenges that limit their widespread adoption in precision robotics applications. The fundamental trade-off between stiffness range and actuator compactness remains unresolved, with most high-performance systems requiring significant additional mechanical complexity. Energy efficiency presents another critical constraint, as current VSAs typically consume 20-40% more power than equivalent fixed-stiffness actuators due to continuous stiffness regulation mechanisms.
Control system integration represents a major technical hurdle, particularly in achieving real-time stiffness adaptation while maintaining precise position control. The nonlinear dynamics introduced by variable stiffness create complex coupling effects between position and compliance control loops, leading to stability issues and reduced tracking accuracy. Current control algorithms struggle with the inherent time delays in stiffness adjustment mechanisms, resulting in suboptimal performance during rapid task transitions.
Manufacturing precision and repeatability pose additional challenges for VSA commercialization. The mechanical complexity of variable stiffness mechanisms introduces multiple sources of backlash, friction, and wear that degrade long-term performance consistency. Temperature sensitivity affects both mechanical components and control electronics, causing drift in stiffness characteristics that compromises precision applications.
Sensor integration limitations further constrain VSA performance, as most current systems lack adequate real-time feedback on actual stiffness states. The absence of reliable stiffness sensing forces reliance on open-loop control strategies that cannot compensate for mechanical variations or external disturbances. This limitation becomes particularly problematic in applications requiring precise force control or adaptive compliance behavior.
The scalability challenge affects both miniaturization for delicate manipulation tasks and scaling up for high-force applications. Current VSA technologies demonstrate limited success in achieving the size and weight constraints required for hand-held surgical robots or micro-manipulation systems while maintaining adequate stiffness variation ranges and control precision.
Existing VSA Optimization Solutions and Methods
01 Control algorithms and feedback systems for precision enhancement
Advanced control algorithms and feedback mechanisms are employed to enhance the precision of variable stiffness actuators. These systems utilize sensors to monitor actuator position, force, and stiffness in real-time, enabling closed-loop control that compensates for errors and disturbances. Adaptive control strategies and model-based approaches are implemented to achieve high-precision positioning and force control while maintaining variable stiffness capabilities.- Control algorithms and feedback systems for precision enhancement: Advanced control algorithms and feedback mechanisms are employed to enhance the precision of variable stiffness actuators. These systems utilize sensors to monitor actuator position, force, and stiffness in real-time, enabling closed-loop control that compensates for errors and disturbances. Adaptive control strategies and model-based approaches are implemented to achieve high-precision positioning and force control while maintaining variable stiffness capabilities.
- Mechanical design optimization for stiffness modulation: Precision in variable stiffness actuators is achieved through optimized mechanical designs that enable accurate and repeatable stiffness adjustment. These designs incorporate specialized transmission mechanisms, spring systems, and coupling elements that minimize backlash and hysteresis. The mechanical structures are engineered to provide linear or predictable non-linear stiffness characteristics across the operational range, ensuring precise control of compliance.
- Sensor integration and measurement techniques: High-precision sensors and measurement systems are integrated into variable stiffness actuators to accurately detect position, torque, and stiffness states. Multi-sensor fusion techniques combine data from various sensing modalities to improve measurement accuracy and reliability. Calibration methods and signal processing algorithms are employed to reduce noise and enhance the resolution of stiffness and force measurements.
- Actuator configuration with multiple degrees of freedom: Variable stiffness actuators designed with multiple degrees of freedom enable precise control in complex motion scenarios. These configurations allow independent adjustment of stiffness in different directions or joints, providing enhanced dexterity and precision for robotic applications. The multi-DOF designs incorporate coordinated control strategies that maintain precision across all axes while adjusting stiffness parameters dynamically.
- Material selection and component manufacturing for precision: The precision of variable stiffness actuators is influenced by careful material selection and manufacturing processes that minimize tolerances and ensure consistent performance. Advanced materials with predictable elastic properties and low thermal expansion are utilized in critical components. Precision manufacturing techniques, including additive manufacturing and high-tolerance machining, are employed to produce components that maintain dimensional accuracy and reduce mechanical play in the stiffness adjustment mechanism.
02 Mechanical design optimization for stiffness modulation
Precision in variable stiffness actuators is achieved through optimized mechanical designs that enable accurate and repeatable stiffness adjustment. These designs incorporate specialized transmission mechanisms, spring systems, and coupling elements that minimize backlash and hysteresis. The mechanical structures are engineered to provide linear or predictable non-linear stiffness characteristics across the operational range, ensuring precise control of compliance.Expand Specific Solutions03 Sensor integration and measurement techniques
High-precision sensors and measurement systems are integrated into variable stiffness actuators to accurately detect position, torque, and stiffness states. Multi-sensor fusion techniques combine data from various sensing modalities to improve measurement accuracy and reliability. Calibration methods and signal processing algorithms are employed to reduce noise and enhance the resolution of stiffness and force measurements.Expand Specific Solutions04 Actuator configuration with multiple degrees of freedom
Variable stiffness actuators designed with multiple degrees of freedom enable precise control in complex motion scenarios. These configurations allow independent adjustment of stiffness in different directions or joints, providing enhanced dexterity and precision for robotic applications. The multi-DOF designs incorporate coordinated control strategies that maintain precision across all axes while adjusting stiffness parameters dynamically.Expand Specific Solutions05 Material selection and component manufacturing for precision
The precision of variable stiffness actuators is influenced by careful material selection and manufacturing processes that minimize tolerances and ensure consistent performance. Advanced materials with predictable elastic properties and low thermal expansion are utilized in critical components. Precision manufacturing techniques, including additive manufacturing and high-tolerance machining, are employed to produce components that maintain dimensional accuracy and reduce mechanical play in the stiffness adjustment mechanism.Expand Specific Solutions
Major Players in VSA and Precision Robotics Industry
The variable stiffness actuator (VSA) technology for robotics precision represents an emerging field in the early growth stage of industry development, with significant market potential driven by increasing demand for adaptive robotic systems across manufacturing, healthcare, and service sectors. The competitive landscape demonstrates moderate technology maturity, characterized by strong academic research foundations from leading institutions including Harbin Institute of Technology, Xi'an Jiaotong University, and Indian Institute of Technology Madras, alongside established industrial players like Universal Robots (Teradyne Robotics), Flexiv Robotics, and ROBOTIS. While academic institutions are advancing fundamental VSA principles and control algorithms, commercial entities are focusing on practical implementation and market-ready solutions, creating a dynamic ecosystem where research-driven innovation meets industrial application demands for enhanced robotic precision and adaptability.
Harbin Institute of Technology
Technical Solution: Harbin Institute of Technology has developed novel variable stiffness actuator designs based on bio-inspired mechanisms, incorporating series elastic elements with controllable stiffness characteristics through electromagnetic or pneumatic adjustment systems. Their research focuses on optimizing actuator performance through advanced control algorithms that combine model predictive control with machine learning techniques to achieve precise stiffness modulation. The actuators feature innovative mechanical designs including variable geometry springs and smart material integration, enabling both high precision positioning and compliant interaction capabilities for advanced robotic applications in manufacturing and service domains.
Strengths: Innovative bio-inspired designs and cutting-edge research in adaptive control algorithms. Weaknesses: Technology primarily in research phase with limited commercial availability and scalability challenges.
Teradyne Robotics A/S
Technical Solution: Teradyne Robotics has developed collaborative robot actuators with integrated variable stiffness technology, utilizing advanced impedance control algorithms that can modulate joint compliance in real-time based on force feedback and task requirements. Their actuators feature dual-mode operation capabilities, switching between high-precision rigid positioning for assembly tasks and compliant behavior for safe human collaboration. The system incorporates proprietary safety algorithms that automatically adjust stiffness parameters when detecting human presence or unexpected contact forces, achieving both precision manufacturing requirements and collaborative safety standards through dynamic stiffness optimization.
Strengths: Excellent safety features and proven reliability in industrial collaborative applications. Weaknesses: Limited customization options and higher maintenance requirements for complex stiffness profiles.
Core Patents in Variable Stiffness Control Technologies
Robotic arm
PatentInactiveGB2579597A
Innovation
- A modular robotic arm design featuring interchangeable joint and end effector modules with variable stiffness actuators, allowing for swapping of modules to adjust torque vs. speed characteristics and enabling easy maintenance, along with end effectors for specific tasks like cutting and grasping.




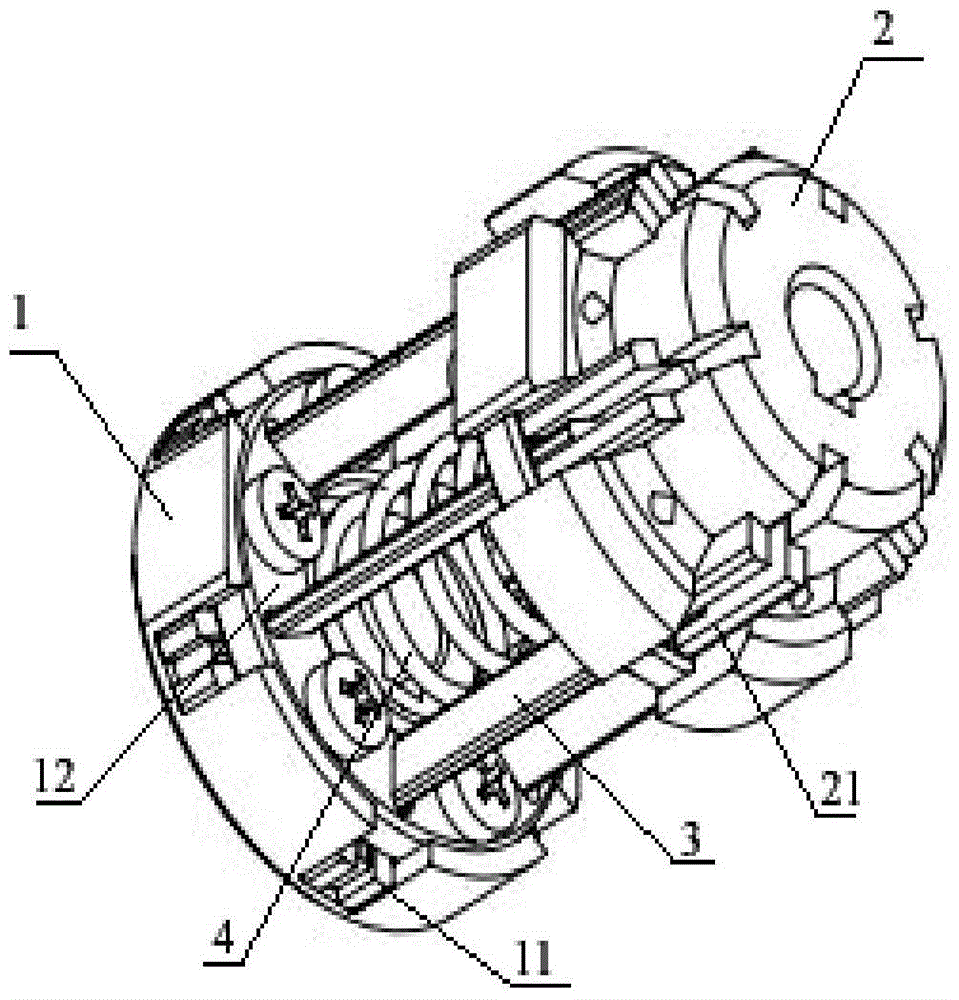
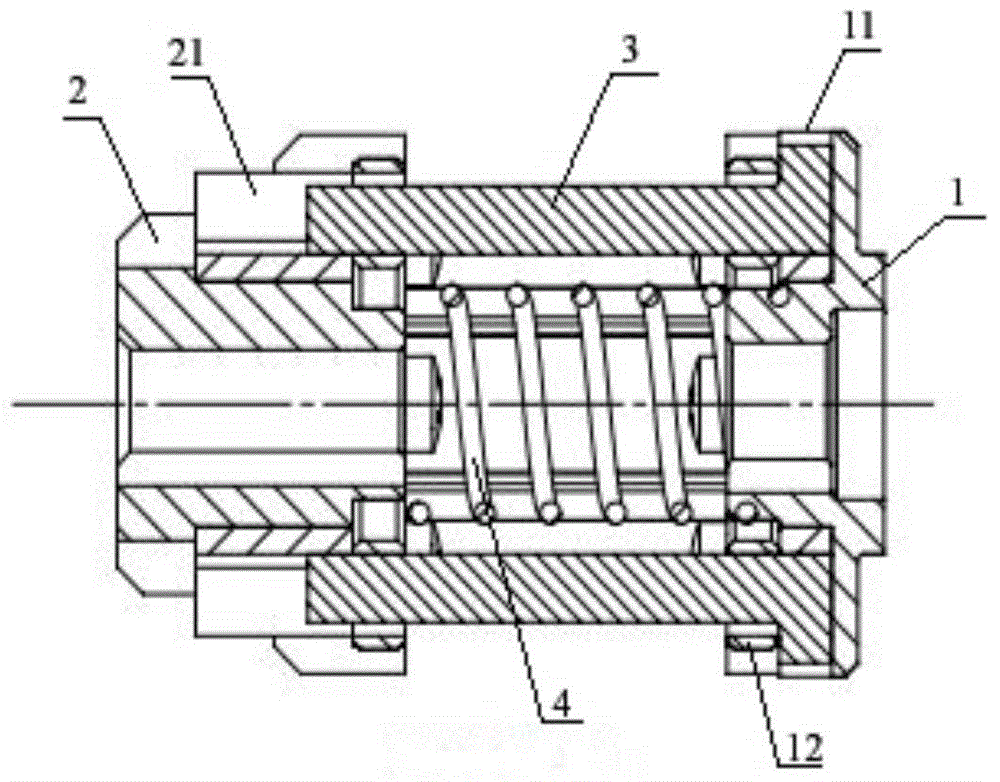
Variable stiffness shaft coupling and variable stiffness driving mechanism
PatentActiveCN104863982A
Innovation
- A variable stiffness coupling composed of a first half coupling and a second half coupling is used to transmit torque through an elastic reed and is supported by an elastic support body. The sliding mechanism is used to adjust the effective length of the elastic reed, thereby achieving The adjustable transmission stiffness, combined with the stiffness adjustment components of the drive motor and linear transmission components, simplifies the structure and expands the stiffness adjustment range.
Safety Standards for Variable Stiffness Robotic Systems
The development of comprehensive safety standards for variable stiffness robotic systems represents a critical imperative as these advanced actuators become increasingly integrated into human-collaborative environments. Current safety frameworks primarily address traditional rigid robotic systems, creating significant regulatory gaps that must be addressed to ensure safe deployment of variable stiffness technologies in precision applications.
International standardization bodies, including ISO and IEC, are actively developing specialized protocols for compliant robotic systems. The emerging ISO 13482 extensions specifically target variable stiffness mechanisms, establishing force limitation thresholds that adapt dynamically based on actuator compliance states. These standards mandate real-time monitoring of stiffness parameters, requiring continuous assessment of mechanical impedance to prevent potentially hazardous force transmission during human-robot interaction scenarios.
Functional safety requirements for variable stiffness actuators demand implementation of redundant sensing systems capable of detecting stiffness modulation failures. The proposed SIL 2 (Safety Integrity Level 2) classification necessitates dual-channel monitoring of both position and compliance parameters, with mandatory fail-safe mechanisms that automatically transition actuators to minimum stiffness configurations upon detection of control system anomalies.
Risk assessment methodologies specific to variable stiffness systems incorporate probabilistic models that account for stiffness uncertainty and dynamic compliance variations. These frameworks evaluate potential injury severity across the full spectrum of actuator stiffness ranges, establishing maximum permissible force thresholds that vary inversely with system stiffness levels to maintain consistent safety margins.
Certification processes for variable stiffness robotic systems require extensive validation testing across operational stiffness ranges, including accelerated aging tests to verify long-term compliance behavior stability. Regulatory bodies mandate comprehensive documentation of stiffness control algorithms, emergency stop procedures, and human-machine interface protocols to ensure transparent safety verification processes for precision robotic applications.
International standardization bodies, including ISO and IEC, are actively developing specialized protocols for compliant robotic systems. The emerging ISO 13482 extensions specifically target variable stiffness mechanisms, establishing force limitation thresholds that adapt dynamically based on actuator compliance states. These standards mandate real-time monitoring of stiffness parameters, requiring continuous assessment of mechanical impedance to prevent potentially hazardous force transmission during human-robot interaction scenarios.
Functional safety requirements for variable stiffness actuators demand implementation of redundant sensing systems capable of detecting stiffness modulation failures. The proposed SIL 2 (Safety Integrity Level 2) classification necessitates dual-channel monitoring of both position and compliance parameters, with mandatory fail-safe mechanisms that automatically transition actuators to minimum stiffness configurations upon detection of control system anomalies.
Risk assessment methodologies specific to variable stiffness systems incorporate probabilistic models that account for stiffness uncertainty and dynamic compliance variations. These frameworks evaluate potential injury severity across the full spectrum of actuator stiffness ranges, establishing maximum permissible force thresholds that vary inversely with system stiffness levels to maintain consistent safety margins.
Certification processes for variable stiffness robotic systems require extensive validation testing across operational stiffness ranges, including accelerated aging tests to verify long-term compliance behavior stability. Regulatory bodies mandate comprehensive documentation of stiffness control algorithms, emergency stop procedures, and human-machine interface protocols to ensure transparent safety verification processes for precision robotic applications.
Energy Efficiency Considerations in VSA Design
Energy efficiency represents a critical design parameter in Variable Stiffness Actuators (VSAs) that directly impacts their practical deployment in precision robotics applications. The inherent trade-off between stiffness modulation capabilities and power consumption necessitates sophisticated optimization strategies to achieve optimal performance while maintaining reasonable energy budgets.
The primary energy consumption sources in VSAs include the main actuation motor, stiffness adjustment mechanisms, and control electronics. Traditional VSA designs often suffer from continuous power draw during stiffness maintenance, particularly in systems employing electromagnetic or pneumatic stiffness modulation. This constant energy requirement significantly limits operational duration and increases thermal management challenges in precision robotics applications.
Advanced energy-efficient VSA architectures leverage passive stiffness storage mechanisms, such as spring-based systems with mechanical locking features. These designs enable stiffness maintenance without continuous power input, reducing overall energy consumption by up to 60% compared to active stiffness control systems. The integration of energy recovery mechanisms during stiffness transitions further enhances efficiency by capturing and reusing kinetic energy that would otherwise be dissipated as heat.
Control strategy optimization plays a crucial role in energy efficiency enhancement. Predictive control algorithms can anticipate stiffness requirements based on task planning, enabling proactive energy management and minimizing unnecessary stiffness adjustments. Model predictive control approaches demonstrate particular effectiveness in reducing energy consumption while maintaining precision requirements through optimal trajectory and stiffness co-optimization.
Material selection significantly influences VSA energy efficiency, with smart materials like shape memory alloys offering inherently energy-efficient stiffness modulation capabilities. These materials provide bistable stiffness states with minimal holding power requirements, though they introduce response time limitations that must be carefully considered in precision applications.
Thermal management considerations become increasingly important as energy efficiency improvements often concentrate heat generation in specific components. Effective thermal design ensures consistent performance while preventing efficiency degradation due to temperature-related parameter variations in actuator components.
The primary energy consumption sources in VSAs include the main actuation motor, stiffness adjustment mechanisms, and control electronics. Traditional VSA designs often suffer from continuous power draw during stiffness maintenance, particularly in systems employing electromagnetic or pneumatic stiffness modulation. This constant energy requirement significantly limits operational duration and increases thermal management challenges in precision robotics applications.
Advanced energy-efficient VSA architectures leverage passive stiffness storage mechanisms, such as spring-based systems with mechanical locking features. These designs enable stiffness maintenance without continuous power input, reducing overall energy consumption by up to 60% compared to active stiffness control systems. The integration of energy recovery mechanisms during stiffness transitions further enhances efficiency by capturing and reusing kinetic energy that would otherwise be dissipated as heat.
Control strategy optimization plays a crucial role in energy efficiency enhancement. Predictive control algorithms can anticipate stiffness requirements based on task planning, enabling proactive energy management and minimizing unnecessary stiffness adjustments. Model predictive control approaches demonstrate particular effectiveness in reducing energy consumption while maintaining precision requirements through optimal trajectory and stiffness co-optimization.
Material selection significantly influences VSA energy efficiency, with smart materials like shape memory alloys offering inherently energy-efficient stiffness modulation capabilities. These materials provide bistable stiffness states with minimal holding power requirements, though they introduce response time limitations that must be carefully considered in precision applications.
Thermal management considerations become increasingly important as energy efficiency improvements often concentrate heat generation in specific components. Effective thermal design ensures consistent performance while preventing efficiency degradation due to temperature-related parameter variations in actuator components.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!