Comparing Humanoid Locomotion and Drone Mobility
APR 22, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Humanoid and Drone Mobility Evolution and Objectives
The evolution of humanoid locomotion and drone mobility represents two distinct yet increasingly convergent technological paradigms that have fundamentally transformed our understanding of autonomous movement systems. Humanoid robotics emerged from early biomechanical studies in the 1960s, with pioneers like Waseda University's WABOT series establishing foundational principles for bipedal locomotion. The field progressed through decades of incremental advances in actuator technology, control algorithms, and sensor integration, culminating in modern platforms like Boston Dynamics' Atlas and Honda's ASIMO series.
Drone mobility technology followed a parallel but accelerated trajectory, building upon decades of aviation research and benefiting from rapid miniaturization of electronic components. The transition from military applications to civilian markets occurred remarkably quickly, with quadcopter configurations becoming dominant due to their inherent stability and control simplicity. Modern drone systems have achieved unprecedented levels of autonomy through advanced flight control systems and environmental perception capabilities.
The convergence of these technologies has created new possibilities for multi-modal mobility systems. Contemporary research focuses on hybrid platforms that combine terrestrial and aerial capabilities, leveraging the complementary strengths of each locomotion method. Humanoid systems excel in complex terrain navigation and human-environment interaction, while drone platforms offer superior speed, energy efficiency over distance, and three-dimensional maneuverability.
Current technological objectives center on achieving seamless integration between these mobility paradigms. Key development goals include creating unified control architectures that can dynamically switch between locomotion modes based on environmental conditions and mission requirements. Energy management systems represent another critical objective, as both humanoid and drone platforms face significant power consumption challenges that limit operational duration and payload capacity.
The ultimate vision encompasses autonomous systems capable of intelligent mobility decision-making, selecting optimal locomotion strategies based on real-time environmental assessment, mission parameters, and resource constraints. This evolution toward adaptive, multi-modal mobility systems promises to revolutionize applications ranging from search and rescue operations to logistics and human assistance, establishing new benchmarks for autonomous system versatility and effectiveness.
Drone mobility technology followed a parallel but accelerated trajectory, building upon decades of aviation research and benefiting from rapid miniaturization of electronic components. The transition from military applications to civilian markets occurred remarkably quickly, with quadcopter configurations becoming dominant due to their inherent stability and control simplicity. Modern drone systems have achieved unprecedented levels of autonomy through advanced flight control systems and environmental perception capabilities.
The convergence of these technologies has created new possibilities for multi-modal mobility systems. Contemporary research focuses on hybrid platforms that combine terrestrial and aerial capabilities, leveraging the complementary strengths of each locomotion method. Humanoid systems excel in complex terrain navigation and human-environment interaction, while drone platforms offer superior speed, energy efficiency over distance, and three-dimensional maneuverability.
Current technological objectives center on achieving seamless integration between these mobility paradigms. Key development goals include creating unified control architectures that can dynamically switch between locomotion modes based on environmental conditions and mission requirements. Energy management systems represent another critical objective, as both humanoid and drone platforms face significant power consumption challenges that limit operational duration and payload capacity.
The ultimate vision encompasses autonomous systems capable of intelligent mobility decision-making, selecting optimal locomotion strategies based on real-time environmental assessment, mission parameters, and resource constraints. This evolution toward adaptive, multi-modal mobility systems promises to revolutionize applications ranging from search and rescue operations to logistics and human assistance, establishing new benchmarks for autonomous system versatility and effectiveness.
Market Demand for Advanced Locomotion Systems
The global market for advanced locomotion systems is experiencing unprecedented growth driven by the convergence of artificial intelligence, robotics, and autonomous systems. This expansion encompasses both terrestrial humanoid robots and aerial drone platforms, each addressing distinct market segments with unique value propositions. The demand surge reflects increasing automation needs across industries ranging from manufacturing and logistics to healthcare and defense applications.
Humanoid locomotion systems are gaining significant traction in service-oriented markets where human-robot interaction is paramount. The healthcare sector demonstrates substantial demand for bipedal robots capable of navigating complex indoor environments, assisting elderly populations, and performing rehabilitation tasks. Manufacturing facilities increasingly seek humanoid systems that can operate alongside human workers in confined spaces where traditional wheeled robots face limitations. The entertainment and hospitality industries also drive demand for anthropomorphic robots that can engage naturally with customers in retail environments and public spaces.
Drone mobility solutions dominate markets requiring rapid deployment, aerial surveillance, and access to challenging terrains. The logistics sector shows robust demand for autonomous aerial delivery systems, particularly for last-mile delivery in urban environments and remote area access. Infrastructure inspection markets increasingly rely on drone mobility for power line monitoring, bridge assessments, and building maintenance tasks that would be dangerous or costly for human operators. Emergency response and disaster management sectors demonstrate growing adoption of drone systems for search and rescue operations, environmental monitoring, and rapid situation assessment.
The comparative market dynamics reveal complementary rather than competing demand patterns. Humanoid locomotion excels in applications requiring ground-based manipulation, social interaction, and operation within human-designed spaces. Drone mobility dominates scenarios demanding speed, aerial perspective, and access to hazardous or inaccessible locations. This differentiation creates parallel market growth trajectories rather than direct competition.
Emerging market segments demonstrate hybrid demand patterns where both locomotion approaches offer strategic advantages. Smart city initiatives increasingly integrate both humanoid service robots for citizen interaction and drone systems for traffic monitoring and emergency response. Industrial automation projects often combine ground-based humanoid systems for precision assembly tasks with aerial drones for facility monitoring and inventory management.
The market demand trajectory indicates sustained growth across both locomotion paradigms, driven by technological maturation, cost reduction, and expanding application awareness. Regulatory frameworks are evolving to accommodate both terrestrial and aerial autonomous systems, further enabling market expansion and commercial deployment across diverse industry verticals.
Humanoid locomotion systems are gaining significant traction in service-oriented markets where human-robot interaction is paramount. The healthcare sector demonstrates substantial demand for bipedal robots capable of navigating complex indoor environments, assisting elderly populations, and performing rehabilitation tasks. Manufacturing facilities increasingly seek humanoid systems that can operate alongside human workers in confined spaces where traditional wheeled robots face limitations. The entertainment and hospitality industries also drive demand for anthropomorphic robots that can engage naturally with customers in retail environments and public spaces.
Drone mobility solutions dominate markets requiring rapid deployment, aerial surveillance, and access to challenging terrains. The logistics sector shows robust demand for autonomous aerial delivery systems, particularly for last-mile delivery in urban environments and remote area access. Infrastructure inspection markets increasingly rely on drone mobility for power line monitoring, bridge assessments, and building maintenance tasks that would be dangerous or costly for human operators. Emergency response and disaster management sectors demonstrate growing adoption of drone systems for search and rescue operations, environmental monitoring, and rapid situation assessment.
The comparative market dynamics reveal complementary rather than competing demand patterns. Humanoid locomotion excels in applications requiring ground-based manipulation, social interaction, and operation within human-designed spaces. Drone mobility dominates scenarios demanding speed, aerial perspective, and access to hazardous or inaccessible locations. This differentiation creates parallel market growth trajectories rather than direct competition.
Emerging market segments demonstrate hybrid demand patterns where both locomotion approaches offer strategic advantages. Smart city initiatives increasingly integrate both humanoid service robots for citizen interaction and drone systems for traffic monitoring and emergency response. Industrial automation projects often combine ground-based humanoid systems for precision assembly tasks with aerial drones for facility monitoring and inventory management.
The market demand trajectory indicates sustained growth across both locomotion paradigms, driven by technological maturation, cost reduction, and expanding application awareness. Regulatory frameworks are evolving to accommodate both terrestrial and aerial autonomous systems, further enabling market expansion and commercial deployment across diverse industry verticals.
Current State of Humanoid vs Drone Mobility Technologies
Humanoid locomotion technology has achieved significant milestones in recent years, with leading platforms demonstrating increasingly sophisticated bipedal movement capabilities. Boston Dynamics' Atlas robot showcases advanced dynamic balance and agility, capable of performing complex maneuvers including running, jumping, and navigating challenging terrain. Honda's ASIMO series, while discontinued, established foundational principles for stable walking gaits and human-robot interaction. Current humanoid systems typically employ sophisticated sensor fusion combining IMUs, force sensors, and vision systems to maintain stability and adapt to environmental variations.
The locomotion control systems in modern humanoids utilize advanced algorithms including model predictive control, zero moment point calculations, and machine learning approaches for gait optimization. Tesla's Optimus robot represents the latest commercial attempt at scalable humanoid locomotion, focusing on practical applications in manufacturing and service environments. However, current humanoid systems still face significant limitations in energy efficiency, with most requiring tethered power or frequent battery replacements for extended operation.
Drone mobility technology has matured rapidly across multiple form factors, from small consumer quadcopters to large industrial platforms. Multi-rotor systems dominate the current landscape due to their mechanical simplicity and robust flight control algorithms. DJI leads the consumer and commercial markets with sophisticated obstacle avoidance, GPS navigation, and autonomous flight capabilities. Professional platforms like the DJI Matrice series and Freefly Alta demonstrate payload capacities and flight endurance suitable for industrial applications.
Fixed-wing drone technology offers superior energy efficiency for long-range missions, with platforms like the senseFly eBee achieving flight times exceeding 45 minutes. Hybrid VTOL designs attempt to combine the hovering capabilities of multi-rotors with the efficiency of fixed-wing aircraft, though mechanical complexity remains a challenge. Advanced flight control systems now incorporate computer vision, LiDAR, and AI-powered navigation for autonomous operation in complex environments.
The fundamental technological approaches differ significantly between these mobility paradigms. Humanoid locomotion relies on complex mechanical systems with numerous degrees of freedom, requiring sophisticated real-time control algorithms to maintain stability while interacting with ground surfaces. Energy consumption remains a critical limitation, with current systems achieving only 1-2 hours of continuous operation.
Drone mobility leverages aerodynamic principles with relatively simpler mechanical systems but faces regulatory constraints and weather dependencies. Current commercial drones achieve 20-45 minutes of flight time depending on payload and environmental conditions. Both technologies continue advancing through improved battery technology, more efficient actuators, and enhanced autonomous navigation capabilities.
The locomotion control systems in modern humanoids utilize advanced algorithms including model predictive control, zero moment point calculations, and machine learning approaches for gait optimization. Tesla's Optimus robot represents the latest commercial attempt at scalable humanoid locomotion, focusing on practical applications in manufacturing and service environments. However, current humanoid systems still face significant limitations in energy efficiency, with most requiring tethered power or frequent battery replacements for extended operation.
Drone mobility technology has matured rapidly across multiple form factors, from small consumer quadcopters to large industrial platforms. Multi-rotor systems dominate the current landscape due to their mechanical simplicity and robust flight control algorithms. DJI leads the consumer and commercial markets with sophisticated obstacle avoidance, GPS navigation, and autonomous flight capabilities. Professional platforms like the DJI Matrice series and Freefly Alta demonstrate payload capacities and flight endurance suitable for industrial applications.
Fixed-wing drone technology offers superior energy efficiency for long-range missions, with platforms like the senseFly eBee achieving flight times exceeding 45 minutes. Hybrid VTOL designs attempt to combine the hovering capabilities of multi-rotors with the efficiency of fixed-wing aircraft, though mechanical complexity remains a challenge. Advanced flight control systems now incorporate computer vision, LiDAR, and AI-powered navigation for autonomous operation in complex environments.
The fundamental technological approaches differ significantly between these mobility paradigms. Humanoid locomotion relies on complex mechanical systems with numerous degrees of freedom, requiring sophisticated real-time control algorithms to maintain stability while interacting with ground surfaces. Energy consumption remains a critical limitation, with current systems achieving only 1-2 hours of continuous operation.
Drone mobility leverages aerodynamic principles with relatively simpler mechanical systems but faces regulatory constraints and weather dependencies. Current commercial drones achieve 20-45 minutes of flight time depending on payload and environmental conditions. Both technologies continue advancing through improved battery technology, more efficient actuators, and enhanced autonomous navigation capabilities.
Existing Mobility Solutions and Control Algorithms
01 Bipedal locomotion control systems for humanoid robots
Advanced control systems enable humanoid robots to achieve stable bipedal walking through dynamic balance algorithms, gait pattern generation, and real-time adjustment mechanisms. These systems incorporate sensors for terrain detection and adaptive foot placement to maintain stability during locomotion across various surfaces.- Bipedal locomotion control systems for humanoid robots: Advanced control systems enable humanoid robots to achieve stable bipedal walking through dynamic balance algorithms, gait pattern generation, and real-time adjustment mechanisms. These systems incorporate sensors for terrain detection and adaptive foot placement to maintain stability during locomotion across various surfaces.
- Autonomous navigation and path planning for drones: Drone mobility systems utilize autonomous navigation technologies including GPS positioning, obstacle avoidance sensors, and intelligent path planning algorithms. These systems enable drones to navigate complex environments, optimize flight routes, and perform autonomous missions with minimal human intervention.
- Hybrid mobility platforms combining aerial and ground locomotion: Integrated mobility solutions combine drone flight capabilities with ground-based locomotion mechanisms, allowing platforms to transition between aerial and terrestrial movement modes. These hybrid systems provide enhanced operational flexibility for applications requiring multi-modal transportation and access to diverse environments.
- Energy-efficient propulsion and actuation systems: Optimized propulsion mechanisms for both humanoid robots and drones focus on energy efficiency through advanced motor control, lightweight actuator designs, and power management systems. These technologies extend operational duration and improve payload capacity while maintaining precise motion control.
- Coordinated multi-agent mobility systems: Coordination frameworks enable multiple humanoid robots and drones to operate collaboratively, sharing spatial awareness and task allocation through communication networks. These systems facilitate swarm behaviors, formation control, and cooperative mission execution for complex operational scenarios.
02 Autonomous navigation and path planning for drones
Drone mobility systems utilize autonomous navigation technologies including obstacle detection, collision avoidance, and optimized path planning algorithms. These systems enable drones to navigate complex environments independently while maintaining efficient flight trajectories and adapting to dynamic conditions.Expand Specific Solutions03 Hybrid mobility platforms combining aerial and ground locomotion
Integrated mobility solutions combine characteristics of both humanoid locomotion and drone flight capabilities, allowing platforms to transition between ground-based movement and aerial navigation. These hybrid systems provide versatility for operations in diverse environments requiring multiple modes of transportation.Expand Specific Solutions04 Motion stabilization and balance control mechanisms
Stabilization technologies employ gyroscopic systems, inertial measurement units, and feedback control loops to maintain balance and smooth motion during locomotion. These mechanisms are essential for both humanoid robots maintaining upright posture and drones achieving stable flight in varying conditions.Expand Specific Solutions05 Energy-efficient propulsion and actuation systems
Optimized propulsion systems focus on energy efficiency through advanced motor control, power management, and lightweight actuator designs. These systems extend operational duration and improve performance for both legged locomotion in humanoids and rotary or fixed-wing propulsion in drones.Expand Specific Solutions
Leading Companies in Humanoid Robotics and Drone Industry
The humanoid locomotion and drone mobility comparison represents a rapidly evolving technological landscape characterized by significant market growth and diverse maturity levels across different segments. The industry is transitioning from early research phases to commercial deployment, with the global robotics market expanding substantially while drone technology has achieved greater commercial maturity. Key players demonstrate varying technological readiness levels: established corporations like Toyota, Honda, and Sony leverage decades of engineering expertise in humanoid robotics development, while UBTECH Robotics specializes in commercial humanoid platforms. Academic institutions including Carnegie Mellon University, Beijing Institute of Technology, and Zhejiang University drive fundamental research in locomotion algorithms and control systems. Meanwhile, technology giants such as Apple, Samsung Electronics, and Canon contribute advanced sensing and processing capabilities essential for both domains, creating a competitive ecosystem spanning from foundational research to market-ready solutions.
UBTECH Robotics Corp. Ltd.
Technical Solution: UBTECH specializes in humanoid robots with advanced locomotion capabilities, including the Walker series robots that demonstrate dynamic walking, obstacle navigation, and adaptive gait control. Their technology incorporates servo motor systems, IMU sensors, and AI-powered motion planning algorithms. UBTECH's approach focuses on commercializing humanoid robots for service applications, integrating voice recognition, computer vision, and autonomous navigation systems. The company has developed proprietary control algorithms for stable bipedal locomotion and human-robot interaction in domestic and commercial environments.
Strengths: Commercial focus on humanoid robotics, cost-effective manufacturing approach, strong market presence in consumer robotics. Weaknesses: Limited research depth compared to established tech giants, dependency on external component suppliers, smaller R&D budget for advanced locomotion research.
Toyota Motor Corp.
Technical Solution: Toyota has developed humanoid robots including the T-HR3 and T-TR1, focusing on remote operation capabilities and human-robot interaction. Their approach emphasizes master-slave control systems where human operators can control robot movements in real-time. Toyota's humanoid locomotion technology incorporates advanced servo systems and torque control mechanisms for precise movement replication. The company also explores applications in manufacturing and elderly care, integrating their automotive engineering expertise into robotic mobility solutions.
Strengths: Strong engineering background from automotive industry, robust manufacturing capabilities, focus on practical applications. Weaknesses: Less emphasis on autonomous locomotion compared to teleoperation, limited public deployment of humanoid systems.
Key Patents in Bipedal Walking and Autonomous Flight
Control method for floating-base robots including generating feasible motions using time warping
PatentActiveUS20160236349A1
Innovation
- The method employs 'time warping' to adapt human motions by modifying the timeline of poses, making infeasible motions feasible by adjusting the timing of movements rather than changing the poses themselves, using a generalized motion feasibility index that considers friction constraints and center-of-pressure constraints.




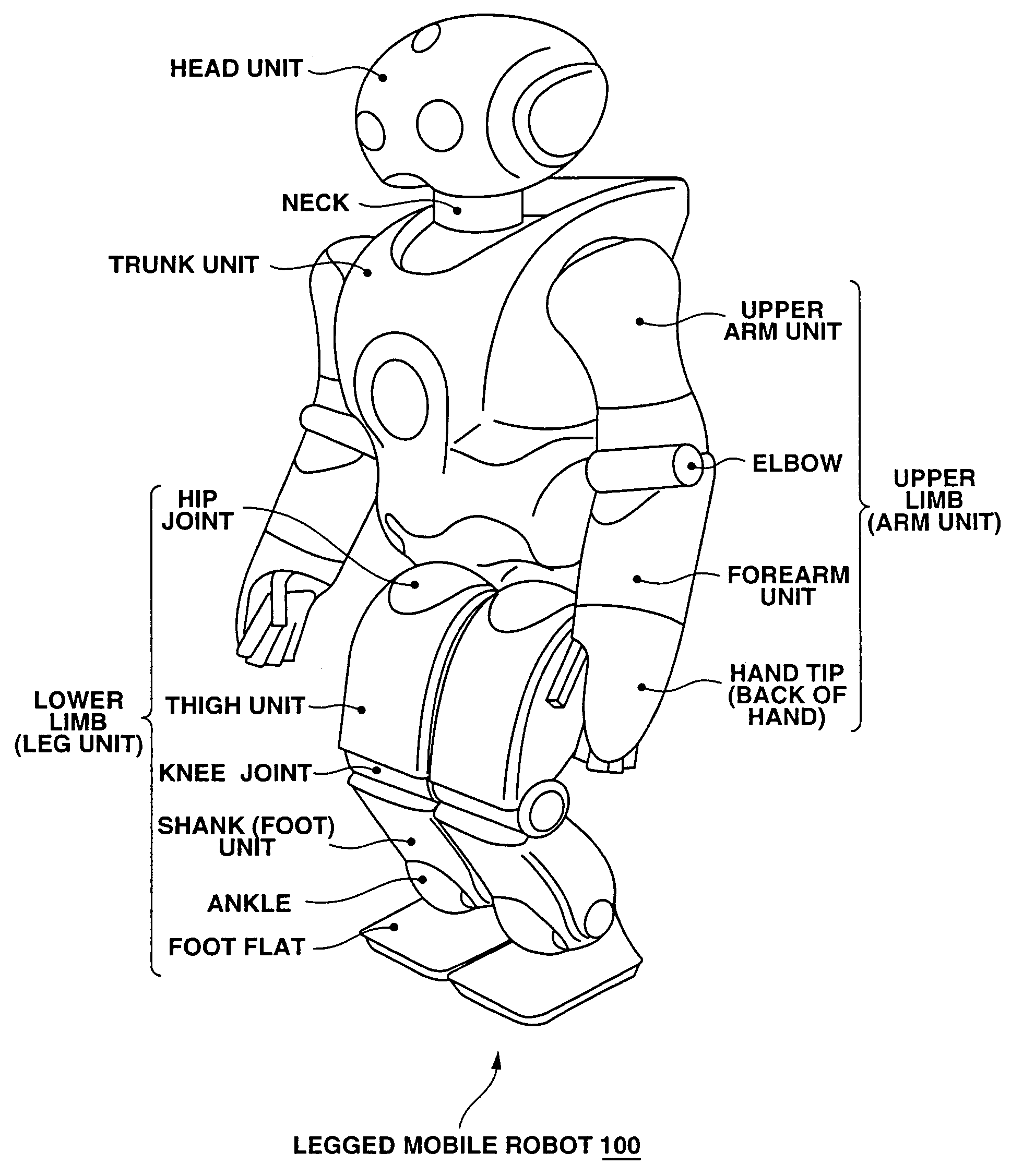
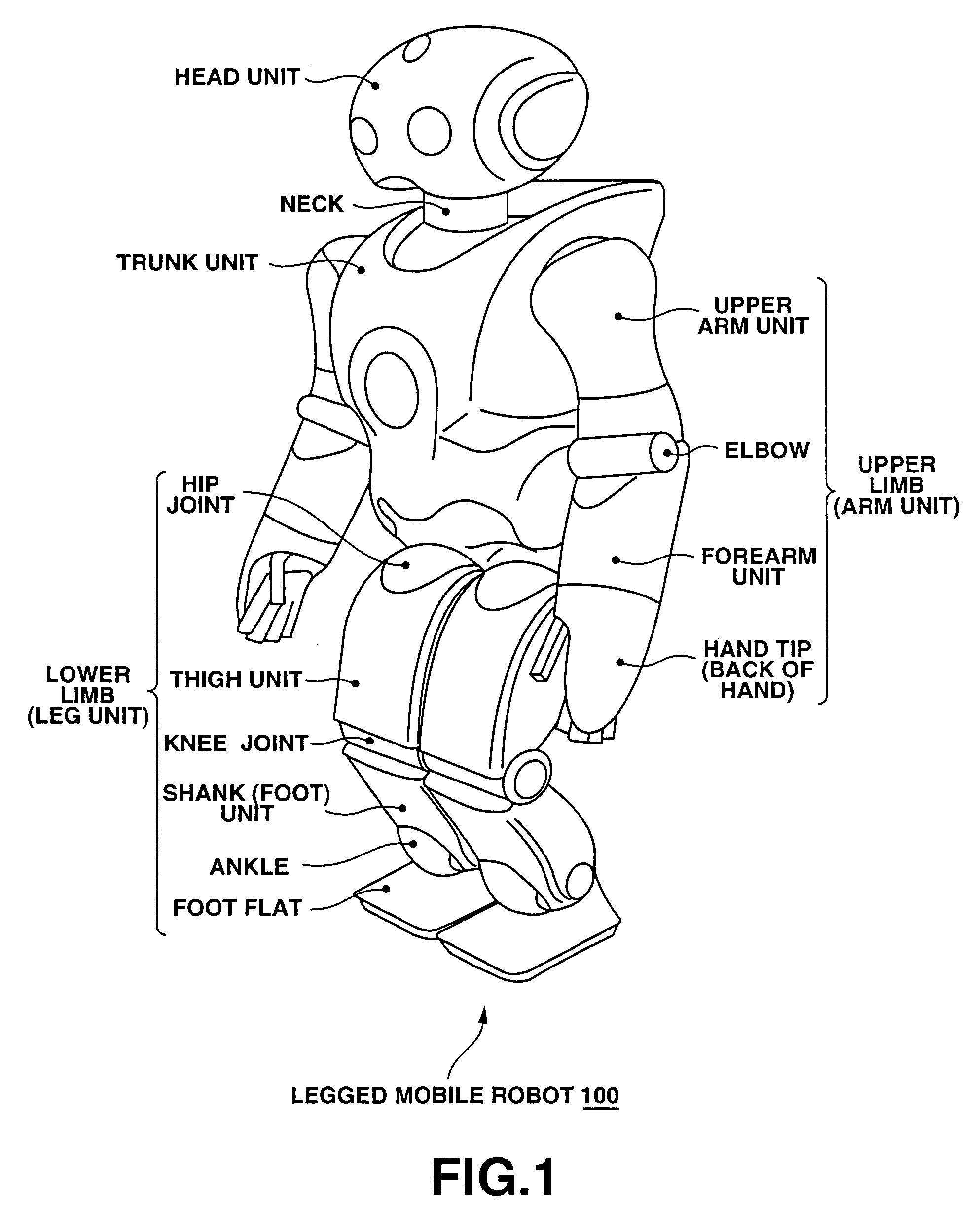
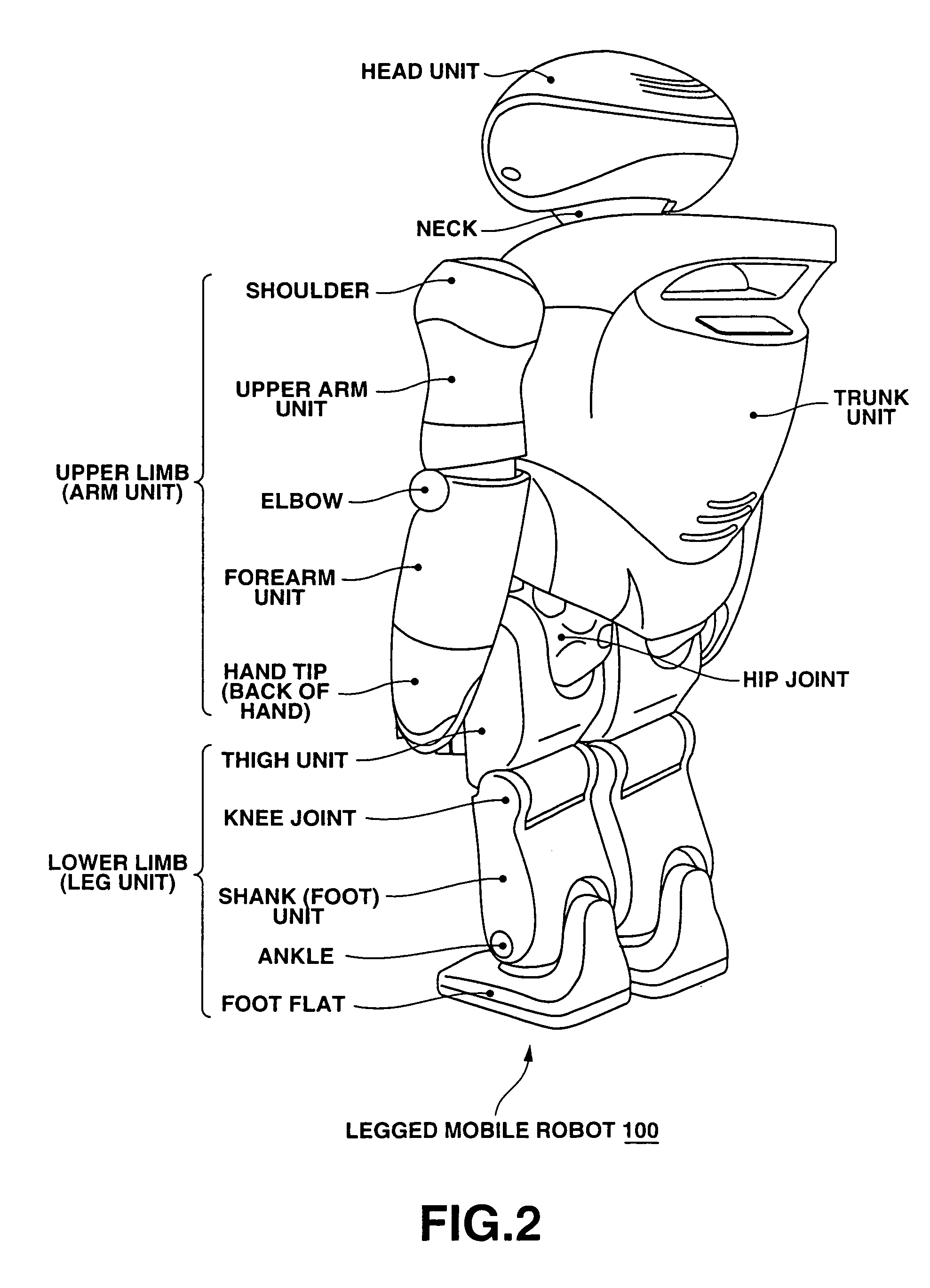
Motion editing apparatus and method for legged mobile robot and computer program
PatentInactiveUS7054718B2
Innovation
- A motion editing apparatus and method that includes data input, reproduction, sensor information acquisition, motion evaluation, and correction units, allowing for the formulation and refinement of motion data based on actual robot responses, incorporating sensor information to ensure stability and adaptability to different environments.

Safety Standards for Mobile Robotics Applications
Safety standards for mobile robotics applications represent a critical framework governing the deployment and operation of autonomous systems, particularly when comparing humanoid locomotion and drone mobility platforms. The regulatory landscape encompasses multiple international standards including ISO 13482 for personal care robots, ISO 10218 for industrial robots, and emerging guidelines for unmanned aerial systems under ASTM and RTCA frameworks.
Humanoid robots operating in human environments must comply with stringent safety protocols addressing physical interaction risks, fall prevention mechanisms, and emergency shutdown procedures. These standards mandate comprehensive hazard assessment protocols, including collision detection systems, force limitation controls, and predictive safety algorithms that monitor joint torques and movement trajectories. The complexity increases significantly when humanoids navigate dynamic environments alongside humans, requiring real-time risk assessment capabilities.
Drone mobility systems face distinct regulatory challenges under aviation authorities such as FAA Part 107 and EASA regulations. Safety standards for aerial platforms emphasize geofencing compliance, altitude restrictions, visual line-of-sight requirements, and fail-safe landing protocols. Advanced drone applications require beyond visual line-of-sight certifications, incorporating redundant communication systems, automated traffic management integration, and robust obstacle avoidance capabilities.
Cross-platform safety considerations emerge when comparing these mobility paradigms. Both systems require standardized testing methodologies for autonomous navigation, sensor fusion reliability, and human-machine interface safety. Environmental hazard assessment protocols must address weather conditions, electromagnetic interference, and operational boundary definitions specific to each platform's operational domain.
Certification processes differ substantially between terrestrial humanoid systems and aerial drone platforms. Humanoid robots undergo extensive biomechanical safety testing, including stability analysis under various loading conditions and human interaction scenarios. Drone certification emphasizes airworthiness standards, propulsion system reliability, and emergency recovery procedures. Both domains increasingly require cybersecurity compliance frameworks addressing communication protocols, data encryption, and system integrity verification.
Future safety standard evolution anticipates convergent requirements for autonomous decision-making systems, incorporating artificial intelligence governance frameworks and ethical operational guidelines. Standardization bodies are developing unified approaches for multi-modal robotic systems that may combine terrestrial and aerial capabilities, necessitating comprehensive safety protocols spanning both operational domains while maintaining platform-specific regulatory compliance requirements.
Humanoid robots operating in human environments must comply with stringent safety protocols addressing physical interaction risks, fall prevention mechanisms, and emergency shutdown procedures. These standards mandate comprehensive hazard assessment protocols, including collision detection systems, force limitation controls, and predictive safety algorithms that monitor joint torques and movement trajectories. The complexity increases significantly when humanoids navigate dynamic environments alongside humans, requiring real-time risk assessment capabilities.
Drone mobility systems face distinct regulatory challenges under aviation authorities such as FAA Part 107 and EASA regulations. Safety standards for aerial platforms emphasize geofencing compliance, altitude restrictions, visual line-of-sight requirements, and fail-safe landing protocols. Advanced drone applications require beyond visual line-of-sight certifications, incorporating redundant communication systems, automated traffic management integration, and robust obstacle avoidance capabilities.
Cross-platform safety considerations emerge when comparing these mobility paradigms. Both systems require standardized testing methodologies for autonomous navigation, sensor fusion reliability, and human-machine interface safety. Environmental hazard assessment protocols must address weather conditions, electromagnetic interference, and operational boundary definitions specific to each platform's operational domain.
Certification processes differ substantially between terrestrial humanoid systems and aerial drone platforms. Humanoid robots undergo extensive biomechanical safety testing, including stability analysis under various loading conditions and human interaction scenarios. Drone certification emphasizes airworthiness standards, propulsion system reliability, and emergency recovery procedures. Both domains increasingly require cybersecurity compliance frameworks addressing communication protocols, data encryption, and system integrity verification.
Future safety standard evolution anticipates convergent requirements for autonomous decision-making systems, incorporating artificial intelligence governance frameworks and ethical operational guidelines. Standardization bodies are developing unified approaches for multi-modal robotic systems that may combine terrestrial and aerial capabilities, necessitating comprehensive safety protocols spanning both operational domains while maintaining platform-specific regulatory compliance requirements.
Energy Efficiency Optimization in Mobile Platforms
Energy efficiency represents a critical performance metric that fundamentally differentiates humanoid locomotion from drone mobility platforms. The optimization approaches for these two mobile systems diverge significantly due to their distinct operational principles and environmental constraints. Humanoid robots typically consume 200-400 watts during walking operations, while comparable-sized drones require 150-300 watts for hovering and forward flight, creating different optimization priorities for each platform.
Humanoid locomotion energy optimization focuses primarily on gait pattern refinement and dynamic balance control. Advanced algorithms such as zero moment point optimization and passive dynamic walking principles have demonstrated energy consumption reductions of up to 35% compared to traditional control methods. The integration of compliant actuators and energy recovery systems during heel strike and toe-off phases enables significant efficiency improvements through biomimetic approaches.
Drone mobility platforms achieve energy optimization through aerodynamic efficiency enhancements and intelligent flight path planning. Variable pitch propeller systems and distributed electric propulsion architectures have shown 20-25% energy savings over conventional fixed-pitch configurations. Advanced battery management systems with real-time load balancing further extend operational duration by optimizing power distribution across multiple motor units.
Comparative analysis reveals that humanoid systems benefit more from mechanical energy recovery mechanisms, while drones achieve greater efficiency gains through aerodynamic optimization and flight control algorithms. Humanoid platforms demonstrate superior energy efficiency during low-speed operations and stationary tasks, whereas drones excel in medium to high-speed locomotion scenarios.
Emerging optimization strategies include hybrid energy storage systems combining batteries with supercapacitors for both platforms. Machine learning-based predictive control algorithms are increasingly deployed to anticipate terrain changes for humanoids and wind conditions for drones, enabling proactive energy management. These adaptive systems demonstrate 15-20% additional energy savings through real-time optimization of locomotion parameters based on environmental feedback and mission requirements.
Humanoid locomotion energy optimization focuses primarily on gait pattern refinement and dynamic balance control. Advanced algorithms such as zero moment point optimization and passive dynamic walking principles have demonstrated energy consumption reductions of up to 35% compared to traditional control methods. The integration of compliant actuators and energy recovery systems during heel strike and toe-off phases enables significant efficiency improvements through biomimetic approaches.
Drone mobility platforms achieve energy optimization through aerodynamic efficiency enhancements and intelligent flight path planning. Variable pitch propeller systems and distributed electric propulsion architectures have shown 20-25% energy savings over conventional fixed-pitch configurations. Advanced battery management systems with real-time load balancing further extend operational duration by optimizing power distribution across multiple motor units.
Comparative analysis reveals that humanoid systems benefit more from mechanical energy recovery mechanisms, while drones achieve greater efficiency gains through aerodynamic optimization and flight control algorithms. Humanoid platforms demonstrate superior energy efficiency during low-speed operations and stationary tasks, whereas drones excel in medium to high-speed locomotion scenarios.
Emerging optimization strategies include hybrid energy storage systems combining batteries with supercapacitors for both platforms. Machine learning-based predictive control algorithms are increasingly deployed to anticipate terrain changes for humanoids and wind conditions for drones, enabling proactive energy management. These adaptive systems demonstrate 15-20% additional energy savings through real-time optimization of locomotion parameters based on environmental feedback and mission requirements.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!