

Comparing Navigation Algorithms in Precision Agro Robots
MAR 2, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Precision Agro Robot Navigation Background and Objectives
Precision agriculture has emerged as a transformative approach to farming, leveraging advanced technologies to optimize crop production while minimizing resource consumption and environmental impact. The integration of robotics into agricultural practices represents a significant evolution from traditional farming methods, driven by the need for increased efficiency, reduced labor costs, and enhanced sustainability. Agricultural robots, particularly those designed for precision applications, have become essential tools for modern farming operations, enabling farmers to perform tasks with unprecedented accuracy and consistency.
The development of precision agricultural robotics has been accelerated by advances in sensor technology, artificial intelligence, and autonomous systems. These robots are designed to operate in complex and dynamic outdoor environments, where they must navigate through crop fields, avoid obstacles, and perform specific agricultural tasks such as planting, weeding, harvesting, and monitoring. The success of these operations heavily depends on the robot's ability to navigate accurately and efficiently through agricultural terrain, making navigation algorithms a critical component of precision agro-robot systems.
Navigation in agricultural environments presents unique challenges that distinguish it from other robotic applications. Agricultural fields are characterized by irregular terrain, varying crop heights, seasonal changes in field conditions, and the presence of both static and dynamic obstacles. Traditional navigation approaches developed for indoor or urban environments often prove inadequate for these complex agricultural settings, necessitating specialized algorithms that can handle the inherent uncertainties and variabilities of farm environments.
The primary objective of developing advanced navigation algorithms for precision agro-robots is to achieve reliable, accurate, and efficient autonomous movement through agricultural fields while maintaining optimal performance across diverse operational conditions. These algorithms must enable robots to follow predetermined paths with high precision, adapt to changing field conditions, and make real-time decisions to avoid obstacles or navigate around crop rows. The ultimate goal is to enhance agricultural productivity by ensuring that robotic systems can operate autonomously for extended periods with minimal human intervention.
Furthermore, the evolution of navigation technologies aims to support the broader objectives of sustainable agriculture by enabling precise application of inputs, reducing soil compaction through optimized path planning, and minimizing crop damage during field operations. As agricultural robotics continues to advance, the development and comparison of navigation algorithms becomes increasingly important for determining the most effective approaches for different agricultural applications and environmental conditions.
The development of precision agricultural robotics has been accelerated by advances in sensor technology, artificial intelligence, and autonomous systems. These robots are designed to operate in complex and dynamic outdoor environments, where they must navigate through crop fields, avoid obstacles, and perform specific agricultural tasks such as planting, weeding, harvesting, and monitoring. The success of these operations heavily depends on the robot's ability to navigate accurately and efficiently through agricultural terrain, making navigation algorithms a critical component of precision agro-robot systems.
Navigation in agricultural environments presents unique challenges that distinguish it from other robotic applications. Agricultural fields are characterized by irregular terrain, varying crop heights, seasonal changes in field conditions, and the presence of both static and dynamic obstacles. Traditional navigation approaches developed for indoor or urban environments often prove inadequate for these complex agricultural settings, necessitating specialized algorithms that can handle the inherent uncertainties and variabilities of farm environments.
The primary objective of developing advanced navigation algorithms for precision agro-robots is to achieve reliable, accurate, and efficient autonomous movement through agricultural fields while maintaining optimal performance across diverse operational conditions. These algorithms must enable robots to follow predetermined paths with high precision, adapt to changing field conditions, and make real-time decisions to avoid obstacles or navigate around crop rows. The ultimate goal is to enhance agricultural productivity by ensuring that robotic systems can operate autonomously for extended periods with minimal human intervention.
Furthermore, the evolution of navigation technologies aims to support the broader objectives of sustainable agriculture by enabling precise application of inputs, reducing soil compaction through optimized path planning, and minimizing crop damage during field operations. As agricultural robotics continues to advance, the development and comparison of navigation algorithms becomes increasingly important for determining the most effective approaches for different agricultural applications and environmental conditions.
Market Demand for Autonomous Agricultural Navigation Systems
The global agricultural sector is experiencing unprecedented pressure to increase productivity while reducing environmental impact, creating substantial demand for autonomous agricultural navigation systems. Traditional farming methods face significant challenges including labor shortages, rising operational costs, and the need for precision application of inputs such as fertilizers and pesticides. These factors are driving widespread adoption of precision agriculture technologies, with autonomous navigation systems serving as a critical enabler for unmanned field operations.
Market drivers for autonomous agricultural navigation extend beyond labor economics to encompass sustainability imperatives. Modern farming operations require precise positioning accuracy to minimize overlap in field operations, reduce chemical usage, and optimize resource allocation. The increasing emphasis on sustainable farming practices has created demand for navigation systems capable of supporting variable rate application technologies, where inputs are applied based on specific field conditions rather than uniform distribution across entire fields.
The commercial viability of autonomous navigation systems is particularly strong in high-value crop production, where precision requirements justify the technology investment. Specialty crops including fruits, vegetables, and nuts represent significant market opportunities due to their labor-intensive cultivation requirements and high per-acre values. Row crop operations for corn, soybeans, and cotton also demonstrate strong demand, especially for large-scale operations where efficiency gains translate directly to profitability improvements.
Geographic market distribution reflects varying agricultural practices and economic conditions. North American and European markets show strong adoption rates driven by labor costs and regulatory pressures for environmental compliance. Emerging markets in Asia and South America present growing opportunities as agricultural mechanization accelerates and farm sizes increase through consolidation.
Technology adoption patterns indicate preference for systems offering multi-platform compatibility and scalability across different implement types. End users prioritize navigation solutions that integrate seamlessly with existing farm management systems while providing reliable performance across diverse field conditions. The market increasingly demands systems capable of operating in challenging environments including dusty conditions, varying terrain, and limited GPS signal availability, particularly for orchard and vineyard applications where canopy coverage affects satellite reception.
Market drivers for autonomous agricultural navigation extend beyond labor economics to encompass sustainability imperatives. Modern farming operations require precise positioning accuracy to minimize overlap in field operations, reduce chemical usage, and optimize resource allocation. The increasing emphasis on sustainable farming practices has created demand for navigation systems capable of supporting variable rate application technologies, where inputs are applied based on specific field conditions rather than uniform distribution across entire fields.
The commercial viability of autonomous navigation systems is particularly strong in high-value crop production, where precision requirements justify the technology investment. Specialty crops including fruits, vegetables, and nuts represent significant market opportunities due to their labor-intensive cultivation requirements and high per-acre values. Row crop operations for corn, soybeans, and cotton also demonstrate strong demand, especially for large-scale operations where efficiency gains translate directly to profitability improvements.
Geographic market distribution reflects varying agricultural practices and economic conditions. North American and European markets show strong adoption rates driven by labor costs and regulatory pressures for environmental compliance. Emerging markets in Asia and South America present growing opportunities as agricultural mechanization accelerates and farm sizes increase through consolidation.
Technology adoption patterns indicate preference for systems offering multi-platform compatibility and scalability across different implement types. End users prioritize navigation solutions that integrate seamlessly with existing farm management systems while providing reliable performance across diverse field conditions. The market increasingly demands systems capable of operating in challenging environments including dusty conditions, varying terrain, and limited GPS signal availability, particularly for orchard and vineyard applications where canopy coverage affects satellite reception.
Current Navigation Algorithm Challenges in Agricultural Robotics
Agricultural robotics navigation systems face significant computational complexity challenges when operating in dynamic field environments. Real-time path planning algorithms must process vast amounts of sensor data while maintaining operational efficiency, creating substantial processing bottlenecks. The integration of multiple sensor inputs including GPS, LiDAR, cameras, and IMU systems generates data volumes that exceed the computational capacity of many embedded systems commonly used in agricultural machinery.
Sensor fusion represents another critical challenge in precision agriculture navigation. Different sensor technologies exhibit varying accuracy levels and environmental sensitivities, making it difficult to achieve consistent localization performance across diverse field conditions. GPS signals suffer from multipath interference near farm buildings and under tree canopies, while visual sensors struggle with dust, varying lighting conditions, and weather-related visibility issues.
Environmental variability poses substantial obstacles for navigation algorithm reliability. Agricultural fields present constantly changing terrain conditions, including varying soil moisture levels, crop growth stages, and seasonal vegetation changes. Traditional navigation algorithms often fail to adapt adequately to these dynamic conditions, resulting in reduced accuracy and potential crop damage during autonomous operations.
Real-time obstacle detection and avoidance capabilities remain technically challenging in agricultural settings. Moving obstacles such as farm workers, livestock, and other machinery require immediate response mechanisms that current algorithms struggle to implement effectively. The distinction between permanent obstacles and temporary obstructions like fallen branches or equipment requires sophisticated decision-making capabilities.
Power consumption optimization presents ongoing technical constraints for autonomous agricultural systems. Navigation algorithms must balance computational accuracy with energy efficiency to ensure extended operational periods without frequent recharging or refueling. This limitation particularly affects the implementation of computationally intensive machine learning algorithms in field robotics applications.
Scalability issues emerge when deploying navigation systems across large agricultural operations with varying field sizes, crop types, and terrain characteristics. Current algorithms often require extensive calibration and customization for different operational environments, limiting their practical deployment efficiency and increasing implementation costs for agricultural enterprises.
Sensor fusion represents another critical challenge in precision agriculture navigation. Different sensor technologies exhibit varying accuracy levels and environmental sensitivities, making it difficult to achieve consistent localization performance across diverse field conditions. GPS signals suffer from multipath interference near farm buildings and under tree canopies, while visual sensors struggle with dust, varying lighting conditions, and weather-related visibility issues.
Environmental variability poses substantial obstacles for navigation algorithm reliability. Agricultural fields present constantly changing terrain conditions, including varying soil moisture levels, crop growth stages, and seasonal vegetation changes. Traditional navigation algorithms often fail to adapt adequately to these dynamic conditions, resulting in reduced accuracy and potential crop damage during autonomous operations.
Real-time obstacle detection and avoidance capabilities remain technically challenging in agricultural settings. Moving obstacles such as farm workers, livestock, and other machinery require immediate response mechanisms that current algorithms struggle to implement effectively. The distinction between permanent obstacles and temporary obstructions like fallen branches or equipment requires sophisticated decision-making capabilities.
Power consumption optimization presents ongoing technical constraints for autonomous agricultural systems. Navigation algorithms must balance computational accuracy with energy efficiency to ensure extended operational periods without frequent recharging or refueling. This limitation particularly affects the implementation of computationally intensive machine learning algorithms in field robotics applications.
Scalability issues emerge when deploying navigation systems across large agricultural operations with varying field sizes, crop types, and terrain characteristics. Current algorithms often require extensive calibration and customization for different operational environments, limiting their practical deployment efficiency and increasing implementation costs for agricultural enterprises.
Existing Navigation Algorithm Solutions for Agro Robots
01 GPS-based navigation algorithms
Navigation algorithms that utilize Global Positioning System (GPS) technology for determining position, velocity, and time information. These algorithms process satellite signals to calculate accurate location data and provide route guidance. The methods typically involve signal acquisition, tracking, and position computation using trilateration techniques from multiple satellites.- GPS-based navigation algorithms: Navigation algorithms that utilize Global Positioning System (GPS) technology for determining position, velocity, and time information. These algorithms process satellite signals to calculate accurate location data and provide route guidance. The methods include signal processing techniques, error correction mechanisms, and coordinate transformation algorithms to enhance positioning accuracy in various environments.
- Inertial navigation systems and sensor fusion: Navigation algorithms that combine inertial measurement units with other sensors to provide continuous positioning information. These systems integrate data from accelerometers, gyroscopes, and magnetometers with external positioning sources. The algorithms employ filtering techniques such as Kalman filters to fuse multiple sensor inputs and maintain accurate navigation even when primary positioning signals are unavailable.
- Path planning and route optimization algorithms: Algorithms designed to calculate optimal routes between origin and destination points considering various constraints and objectives. These methods evaluate multiple factors including distance, time, traffic conditions, and obstacles to determine the most efficient path. The techniques include graph-based algorithms, heuristic search methods, and dynamic programming approaches for real-time route calculation and adjustment.
- Autonomous vehicle navigation systems: Navigation algorithms specifically developed for autonomous and semi-autonomous vehicles that enable self-driving capabilities. These systems integrate perception, localization, and decision-making algorithms to navigate safely in complex environments. The methods process data from multiple sensors including cameras, lidar, and radar to detect obstacles, interpret traffic situations, and execute appropriate navigation maneuvers.
- Indoor and GNSS-denied navigation: Navigation algorithms designed for environments where satellite-based positioning is unavailable or unreliable, such as indoor spaces, urban canyons, or underground locations. These methods utilize alternative positioning technologies including WiFi fingerprinting, Bluetooth beacons, visual odometry, and magnetic field mapping. The algorithms combine multiple positioning sources to maintain continuous navigation capability in challenging environments.
02 Autonomous vehicle navigation systems
Advanced navigation algorithms designed specifically for autonomous vehicles and unmanned systems. These algorithms integrate multiple sensor inputs including cameras, radar, and lidar to enable path planning, obstacle avoidance, and real-time decision making. The systems employ machine learning and artificial intelligence techniques to improve navigation accuracy and safety in complex environments.Expand Specific Solutions03 Indoor navigation and positioning algorithms
Navigation algorithms tailored for indoor environments where GPS signals are unavailable or unreliable. These methods utilize alternative technologies such as WiFi fingerprinting, Bluetooth beacons, inertial measurement units, and visual positioning systems. The algorithms focus on accurate localization within buildings and provide turn-by-turn guidance in complex indoor spaces.Expand Specific Solutions04 Multi-sensor fusion navigation algorithms
Navigation algorithms that combine data from multiple sensor sources to achieve enhanced positioning accuracy and reliability. These algorithms integrate information from GPS, inertial navigation systems, magnetometers, and other sensors using techniques such as Kalman filtering and particle filtering. The fusion approach compensates for individual sensor limitations and provides robust navigation in challenging conditions.Expand Specific Solutions05 Route optimization and path planning algorithms
Navigation algorithms focused on computing optimal routes based on various criteria such as shortest distance, minimum time, fuel efficiency, or traffic conditions. These algorithms employ graph theory, dynamic programming, and heuristic search methods to generate efficient paths. The systems can adapt to real-time traffic information and provide alternative routes when necessary.Expand Specific Solutions
Key Players in Precision Agriculture and Robot Navigation
The precision agricultural robotics navigation sector represents an emerging but rapidly evolving competitive landscape characterized by early-stage market development with significant growth potential. The industry is transitioning from research-intensive phases to commercial deployment, evidenced by the diverse ecosystem of academic institutions and commercial entities. Technology maturity varies considerably across players, with established agricultural machinery manufacturers like Deere & Co., Kubota Corp., and ZF Friedrichshafen AG leveraging decades of mechanical expertise to integrate advanced navigation systems, while specialized robotics companies such as EarthSense Inc., RowBot Systems LLC, and AgreenCulture SAS focus purely on autonomous navigation solutions. The competitive dynamics are further enriched by extensive research contributions from leading agricultural universities including China Agricultural University, South China Agricultural University, and Harbin Institute of Technology, which are advancing fundamental navigation algorithms and precision control systems that bridge the gap between theoretical research and practical field applications.
Rowbot Systems LLC
Technical Solution: Rowbot Systems has developed specialized navigation algorithms for their corn-row robots that operate within growing crops. Their navigation approach combines computer vision algorithms for crop row detection with GPS positioning to maintain accurate inter-row navigation. The system uses machine learning algorithms trained on crop imagery to identify and follow plant rows even in varying growth stages and lighting conditions. Their navigation framework includes obstacle avoidance algorithms specifically designed for agricultural environments, detecting and navigating around damaged plants, irrigation equipment, and field debris. The robots utilize distributed navigation algorithms that enable multiple units to coordinate field operations while avoiding collisions and optimizing coverage patterns. The system adapts to different row spacings and crop types through configurable algorithm parameters.
Strengths: Specialized crop-row navigation, multi-robot coordination, adaptive to crop variations. Weaknesses: Limited to row-crop applications, weather-dependent vision systems, requires crop establishment for navigation.
EarthSense, Inc.
Technical Solution: EarthSense has developed autonomous navigation algorithms for their TerraSentia field robots designed for crop phenotyping and monitoring. Their navigation system combines GPS waypoint navigation with computer vision-based crop row following algorithms. The robots use advanced path planning algorithms that can navigate through crop canopies while collecting high-resolution data on plant health and growth characteristics. Their navigation framework incorporates terrain-adaptive algorithms that adjust robot behavior based on soil conditions, plant density, and field topology. The system includes automated data collection synchronization with navigation data, enabling precise georeferencing of collected agricultural data. EarthSense's algorithms are optimized for research applications, providing repeatable navigation patterns essential for longitudinal crop studies and experimental plot management.
Strengths: Research-focused precision, terrain adaptability, integrated data collection. Weaknesses: Limited commercial scalability, specialized application scope, requires technical expertise for operation.
Core Navigation Algorithm Innovations for Field Operations
Method for correcting navigation positioning data
PatentActiveCN100561130C
Innovation
- Using the methods of map registration, sensor data preprocessing, correction amount decision-making and new positioning data point generation, through the combination of electronic maps and various sensor data, more credible correction data points are generated, avoiding statistical reasoning and history Data estimation to improve real-time processing capabilities.




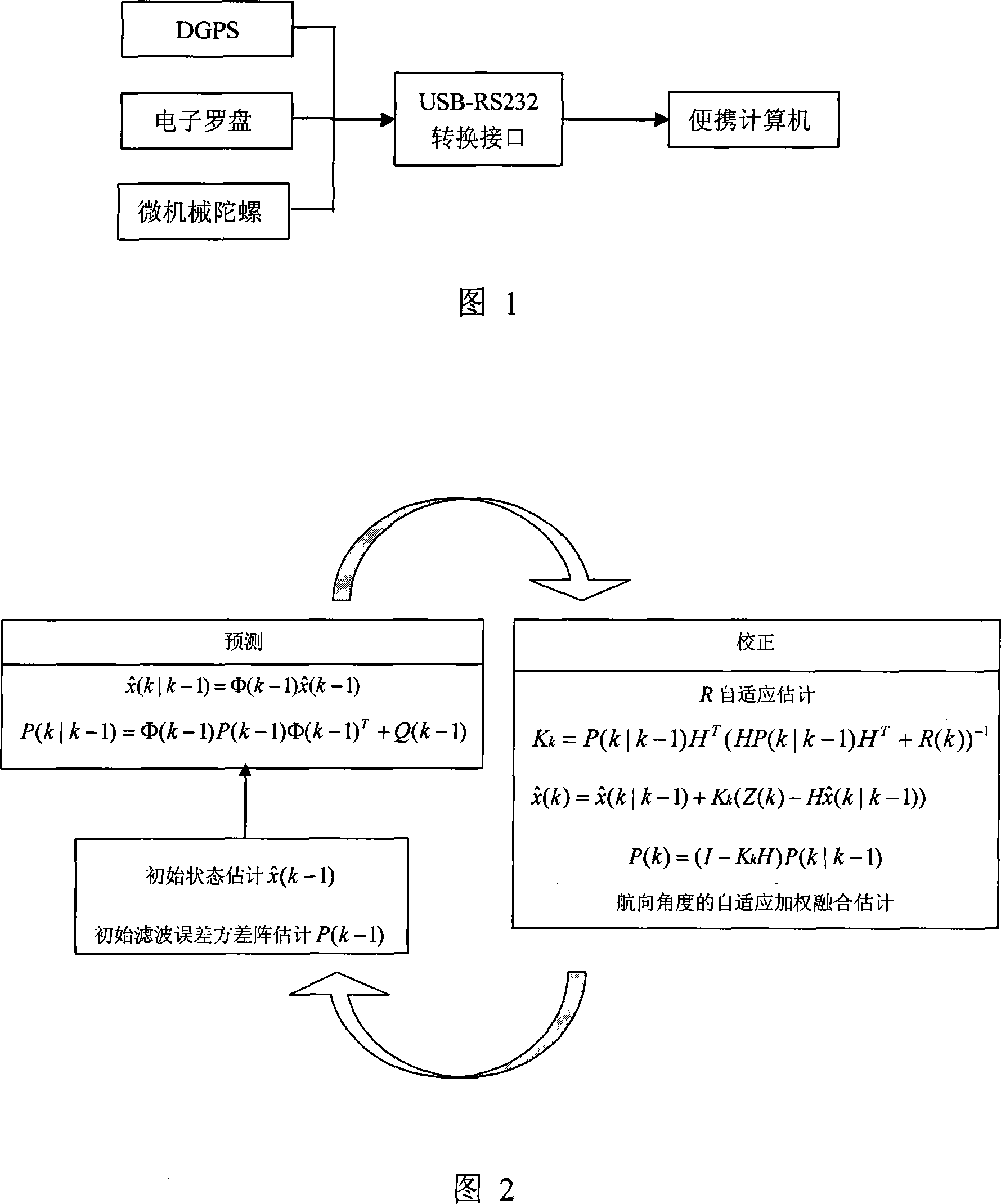
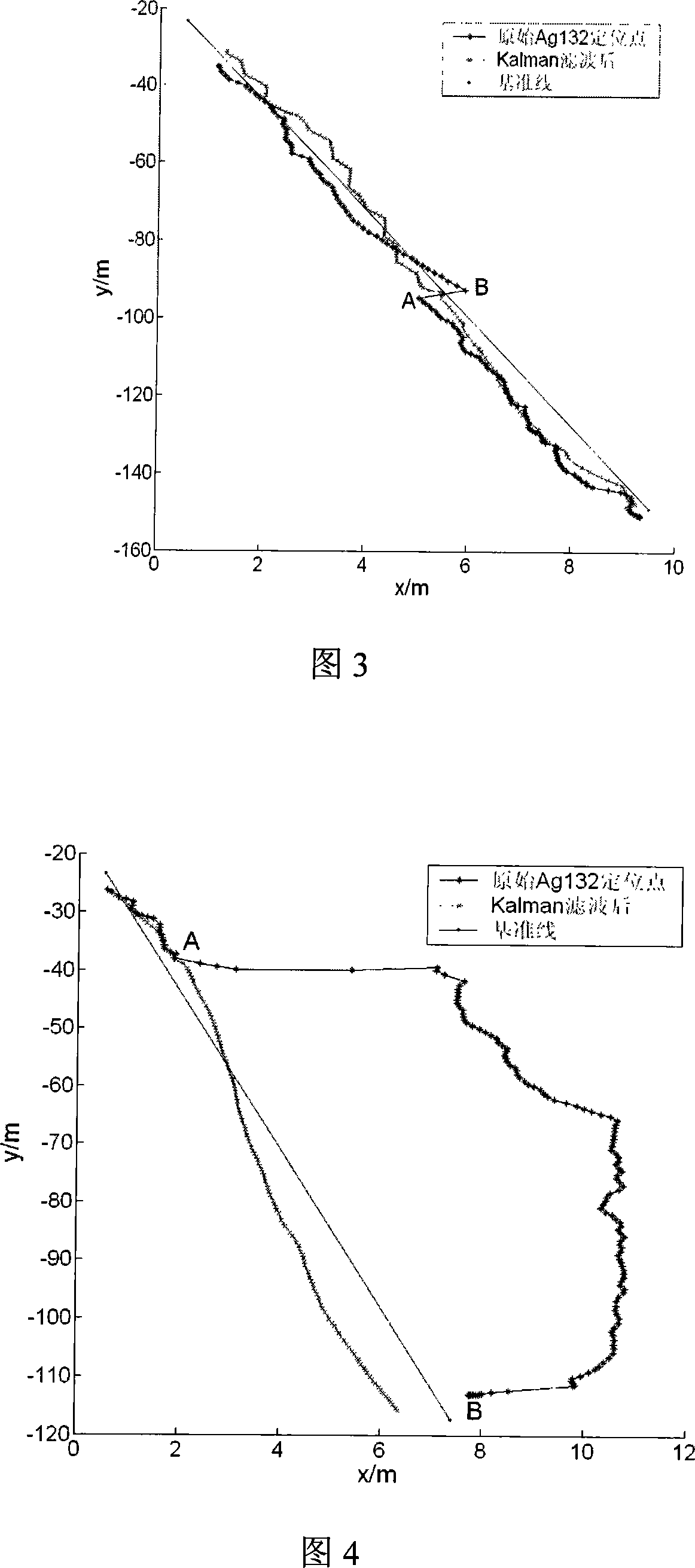
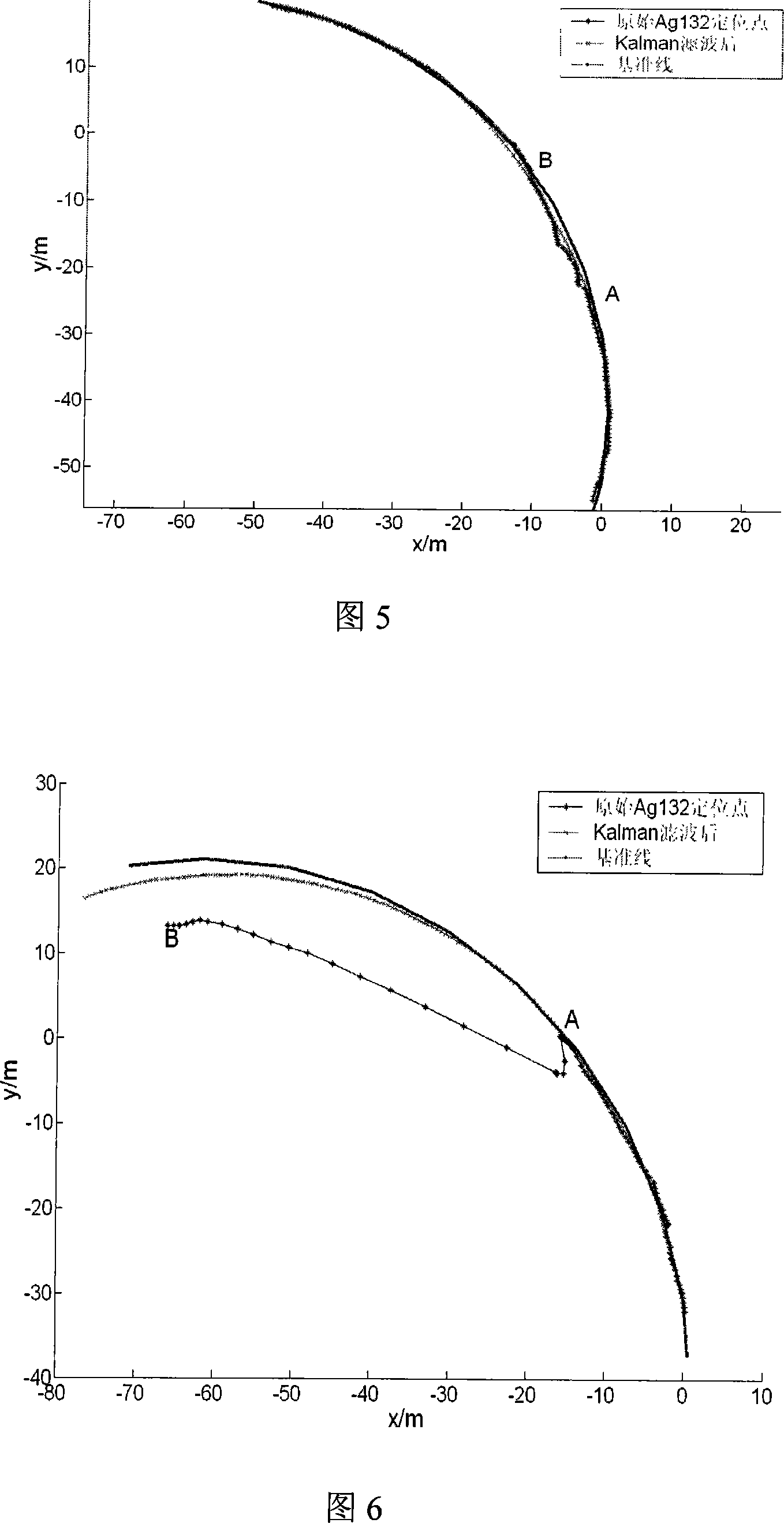
Combined positioning method of agricultural machines navigation
PatentActiveCN101082493A
Innovation
- The pseudo-range differential GPS sensor is used for preliminary positioning, and the heading angle is obtained through adaptive weighted fusion in combination with the electronic compass and micro-mechanical gyro sensor. The adaptive Kalman filter is used to re-fuse the multi-source information to achieve high-precision positioning and control of agricultural machinery. Accurate estimation of heading angle information to avoid filter divergence.
Agricultural Robotics Safety and Compliance Standards
Agricultural robotics safety and compliance standards represent a critical framework governing the deployment of precision agricultural robots equipped with advanced navigation algorithms. These standards encompass multiple regulatory dimensions, including mechanical safety requirements, electromagnetic compatibility, software reliability protocols, and operational safety measures that directly impact navigation system design and implementation.
The International Organization for Standardization (ISO) has established foundational standards such as ISO 18497 for agricultural machinery safety and ISO 25119 for functional safety of electrical systems in agricultural equipment. These frameworks mandate specific requirements for autonomous navigation systems, including fail-safe mechanisms, emergency stop protocols, and human-machine interface standards that navigation algorithms must accommodate during operation.
Regulatory compliance varies significantly across different agricultural markets, with the European Union implementing stringent CE marking requirements under the Machinery Directive 2006/42/EC, while the United States follows ASABE standards and OSHA guidelines. These regional differences create complex compliance landscapes that navigation algorithm developers must navigate when designing globally deployable precision agricultural robots.
Safety standards specifically address navigation-related risks including collision avoidance, boundary detection, and obstacle recognition capabilities. Navigation algorithms must demonstrate compliance with predetermined safety integrity levels, requiring extensive validation testing and documentation of algorithmic decision-making processes under various operational scenarios and environmental conditions.
Emerging compliance frameworks are increasingly focusing on cybersecurity standards for connected agricultural robots, addressing data protection, communication protocol security, and remote monitoring capabilities. These requirements directly influence navigation algorithm architecture, particularly regarding data transmission, cloud connectivity, and over-the-air update mechanisms that modern precision agricultural systems increasingly rely upon.
The certification process for navigation-enabled agricultural robots typically involves comprehensive field testing, algorithm validation under controlled conditions, and demonstration of compliance with relevant safety standards. This process significantly impacts development timelines and costs, requiring navigation algorithm developers to integrate compliance considerations from the earliest design phases rather than treating them as post-development requirements.
The International Organization for Standardization (ISO) has established foundational standards such as ISO 18497 for agricultural machinery safety and ISO 25119 for functional safety of electrical systems in agricultural equipment. These frameworks mandate specific requirements for autonomous navigation systems, including fail-safe mechanisms, emergency stop protocols, and human-machine interface standards that navigation algorithms must accommodate during operation.
Regulatory compliance varies significantly across different agricultural markets, with the European Union implementing stringent CE marking requirements under the Machinery Directive 2006/42/EC, while the United States follows ASABE standards and OSHA guidelines. These regional differences create complex compliance landscapes that navigation algorithm developers must navigate when designing globally deployable precision agricultural robots.
Safety standards specifically address navigation-related risks including collision avoidance, boundary detection, and obstacle recognition capabilities. Navigation algorithms must demonstrate compliance with predetermined safety integrity levels, requiring extensive validation testing and documentation of algorithmic decision-making processes under various operational scenarios and environmental conditions.
Emerging compliance frameworks are increasingly focusing on cybersecurity standards for connected agricultural robots, addressing data protection, communication protocol security, and remote monitoring capabilities. These requirements directly influence navigation algorithm architecture, particularly regarding data transmission, cloud connectivity, and over-the-air update mechanisms that modern precision agricultural systems increasingly rely upon.
The certification process for navigation-enabled agricultural robots typically involves comprehensive field testing, algorithm validation under controlled conditions, and demonstration of compliance with relevant safety standards. This process significantly impacts development timelines and costs, requiring navigation algorithm developers to integrate compliance considerations from the earliest design phases rather than treating them as post-development requirements.
Environmental Impact Assessment of Autonomous Farm Systems
The environmental implications of autonomous farm systems equipped with advanced navigation algorithms represent a critical consideration in modern agricultural technology deployment. These systems fundamentally alter traditional farming practices through precision-guided operations that can significantly reduce resource consumption and minimize ecological disruption when properly implemented.
Carbon footprint analysis reveals that autonomous agricultural robots demonstrate substantial potential for greenhouse gas reduction compared to conventional farming machinery. The precision navigation capabilities enable optimized field coverage patterns that reduce fuel consumption by eliminating redundant passes and minimizing soil compaction. Advanced path-planning algorithms can decrease operational energy requirements by up to 30% while maintaining equivalent productivity levels.
Soil health preservation emerges as a primary environmental benefit of precision navigation systems. Traditional farming equipment often causes significant soil compaction due to repeated trafficking over the same areas. Autonomous systems with sophisticated navigation algorithms can implement controlled traffic farming patterns, restricting machinery movement to designated pathways and preserving soil structure in crop production zones.
Chemical input optimization represents another significant environmental advantage. Precision navigation enables variable rate application technologies that adjust fertilizer, pesticide, and herbicide distribution based on real-time field conditions and historical data analysis. This targeted approach can reduce chemical usage by 15-25% while maintaining crop yields, thereby minimizing groundwater contamination and reducing agricultural runoff into surrounding ecosystems.
Biodiversity conservation benefits from the reduced disturbance patterns enabled by autonomous navigation systems. These robots can operate with minimal disruption to wildlife habitats, implementing precision timing for field operations that avoid critical breeding or migration periods. The ability to navigate around sensitive areas while maintaining operational efficiency supports ecosystem preservation within agricultural landscapes.
Water resource management improves through integration of navigation algorithms with precision irrigation systems. Autonomous platforms can execute variable rate irrigation based on soil moisture mapping and crop stress indicators, reducing water consumption while optimizing plant health. This precision approach addresses growing concerns about agricultural water usage in regions facing increasing drought conditions.
However, environmental challenges include the embodied carbon in manufacturing sophisticated electronic components and the potential for increased electronic waste generation. The lifecycle assessment of these systems must account for battery disposal, sensor replacement, and the environmental cost of rare earth materials used in advanced navigation hardware.
Carbon footprint analysis reveals that autonomous agricultural robots demonstrate substantial potential for greenhouse gas reduction compared to conventional farming machinery. The precision navigation capabilities enable optimized field coverage patterns that reduce fuel consumption by eliminating redundant passes and minimizing soil compaction. Advanced path-planning algorithms can decrease operational energy requirements by up to 30% while maintaining equivalent productivity levels.
Soil health preservation emerges as a primary environmental benefit of precision navigation systems. Traditional farming equipment often causes significant soil compaction due to repeated trafficking over the same areas. Autonomous systems with sophisticated navigation algorithms can implement controlled traffic farming patterns, restricting machinery movement to designated pathways and preserving soil structure in crop production zones.
Chemical input optimization represents another significant environmental advantage. Precision navigation enables variable rate application technologies that adjust fertilizer, pesticide, and herbicide distribution based on real-time field conditions and historical data analysis. This targeted approach can reduce chemical usage by 15-25% while maintaining crop yields, thereby minimizing groundwater contamination and reducing agricultural runoff into surrounding ecosystems.
Biodiversity conservation benefits from the reduced disturbance patterns enabled by autonomous navigation systems. These robots can operate with minimal disruption to wildlife habitats, implementing precision timing for field operations that avoid critical breeding or migration periods. The ability to navigate around sensitive areas while maintaining operational efficiency supports ecosystem preservation within agricultural landscapes.
Water resource management improves through integration of navigation algorithms with precision irrigation systems. Autonomous platforms can execute variable rate irrigation based on soil moisture mapping and crop stress indicators, reducing water consumption while optimizing plant health. This precision approach addresses growing concerns about agricultural water usage in regions facing increasing drought conditions.
However, environmental challenges include the embodied carbon in manufacturing sophisticated electronic components and the potential for increased electronic waste generation. The lifecycle assessment of these systems must account for battery disposal, sensor replacement, and the environmental cost of rare earth materials used in advanced navigation hardware.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!