

Cycloidal Drives for Autonomous Delivery: Path Tracking
APR 27, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Cycloidal Drive Technology Background and Autonomous Delivery Goals
Cycloidal drives represent a sophisticated mechanical transmission technology that has evolved significantly since their initial development in the early 20th century. Originally conceived as a solution for high-precision, high-torque applications, these drives utilize the mathematical principles of cycloidal motion to achieve exceptional gear reduction ratios while maintaining compact form factors. The technology has found extensive applications in robotics, aerospace, and industrial automation due to its inherent advantages of zero backlash, high torsional rigidity, and superior shock load resistance.
The fundamental mechanism operates through the eccentric rotation of a cycloidal disc within a ring of pins, creating a rolling motion that translates rotational input into precisely controlled output. This unique kinematic arrangement enables gear reduction ratios ranging from 6:1 to over 100:1 in a single stage, making it particularly attractive for applications requiring precise motion control. The technology has witnessed continuous refinement in materials science, manufacturing precision, and design optimization, leading to improved efficiency ratings exceeding 90% in modern implementations.
In the context of autonomous delivery systems, the integration of cycloidal drives addresses critical challenges in mobile robotics navigation and control. The primary technical objective centers on achieving superior path tracking accuracy through enhanced wheel motor control and steering mechanism precision. Autonomous delivery vehicles require exceptional positional accuracy to navigate complex urban environments, avoid obstacles, and execute precise docking maneuvers at delivery locations.
The specific goals for cycloidal drive implementation in autonomous delivery applications encompass several key performance metrics. First, achieving sub-centimeter path tracking accuracy across various terrain conditions and payload configurations. Second, ensuring consistent performance under dynamic loading conditions typical of delivery operations, including acceleration, deceleration, and cornering forces. Third, maintaining operational reliability over extended duty cycles while minimizing maintenance requirements in field deployment scenarios.
Advanced path tracking objectives also include real-time compensation for external disturbances such as wind loads, surface irregularities, and payload shifts during transit. The cycloidal drive technology aims to provide the mechanical foundation for implementing sophisticated control algorithms that can adapt to changing operational conditions while maintaining trajectory precision essential for safe and efficient autonomous delivery operations.
The fundamental mechanism operates through the eccentric rotation of a cycloidal disc within a ring of pins, creating a rolling motion that translates rotational input into precisely controlled output. This unique kinematic arrangement enables gear reduction ratios ranging from 6:1 to over 100:1 in a single stage, making it particularly attractive for applications requiring precise motion control. The technology has witnessed continuous refinement in materials science, manufacturing precision, and design optimization, leading to improved efficiency ratings exceeding 90% in modern implementations.
In the context of autonomous delivery systems, the integration of cycloidal drives addresses critical challenges in mobile robotics navigation and control. The primary technical objective centers on achieving superior path tracking accuracy through enhanced wheel motor control and steering mechanism precision. Autonomous delivery vehicles require exceptional positional accuracy to navigate complex urban environments, avoid obstacles, and execute precise docking maneuvers at delivery locations.
The specific goals for cycloidal drive implementation in autonomous delivery applications encompass several key performance metrics. First, achieving sub-centimeter path tracking accuracy across various terrain conditions and payload configurations. Second, ensuring consistent performance under dynamic loading conditions typical of delivery operations, including acceleration, deceleration, and cornering forces. Third, maintaining operational reliability over extended duty cycles while minimizing maintenance requirements in field deployment scenarios.
Advanced path tracking objectives also include real-time compensation for external disturbances such as wind loads, surface irregularities, and payload shifts during transit. The cycloidal drive technology aims to provide the mechanical foundation for implementing sophisticated control algorithms that can adapt to changing operational conditions while maintaining trajectory precision essential for safe and efficient autonomous delivery operations.
Market Demand for Precision Autonomous Delivery Systems
The autonomous delivery market has experienced unprecedented growth driven by evolving consumer expectations for rapid, contactless delivery services. E-commerce expansion, accelerated by global events and changing shopping behaviors, has created substantial demand for last-mile delivery solutions that can operate efficiently without human intervention. Urban congestion and labor shortages in logistics sectors have further intensified the need for automated delivery systems capable of navigating complex environments with minimal human oversight.
Precision requirements in autonomous delivery systems have become increasingly stringent as applications expand beyond simple package transport. Medical supply delivery, pharmaceutical distribution, and food service applications demand exceptional accuracy in both navigation and payload handling. These sectors require delivery systems that can maintain precise positioning within centimeter-level tolerances while ensuring cargo stability throughout the delivery process. The integration of advanced drive systems becomes critical in meeting these demanding operational specifications.
Market segmentation reveals distinct precision requirements across different delivery categories. High-value electronics, fragile goods, and temperature-sensitive products represent premium market segments where precision drive systems justify higher implementation costs. These applications require smooth acceleration profiles, minimal vibration transmission, and precise speed control to prevent damage during transport. The growing market for specialized delivery services has created opportunities for advanced drive technologies that can deliver superior performance compared to conventional systems.
Regulatory frameworks increasingly emphasize safety and reliability standards for autonomous delivery vehicles operating in public spaces. Compliance requirements mandate predictable vehicle behavior, precise path following capabilities, and fail-safe operation modes. These regulatory pressures drive demand for drive systems that offer enhanced controllability and diagnostic capabilities, positioning cycloidal drives as attractive solutions for manufacturers seeking to meet stringent certification requirements.
The competitive landscape shows established logistics companies and emerging robotics firms investing heavily in precision delivery technologies. Market dynamics favor solutions that can demonstrate measurable improvements in delivery accuracy, operational reliability, and maintenance efficiency. Cost-effectiveness remains crucial, but premium applications increasingly prioritize performance characteristics that cycloidal drives can uniquely provide, including high torque density, precise positioning, and robust operation in varying environmental conditions.
Precision requirements in autonomous delivery systems have become increasingly stringent as applications expand beyond simple package transport. Medical supply delivery, pharmaceutical distribution, and food service applications demand exceptional accuracy in both navigation and payload handling. These sectors require delivery systems that can maintain precise positioning within centimeter-level tolerances while ensuring cargo stability throughout the delivery process. The integration of advanced drive systems becomes critical in meeting these demanding operational specifications.
Market segmentation reveals distinct precision requirements across different delivery categories. High-value electronics, fragile goods, and temperature-sensitive products represent premium market segments where precision drive systems justify higher implementation costs. These applications require smooth acceleration profiles, minimal vibration transmission, and precise speed control to prevent damage during transport. The growing market for specialized delivery services has created opportunities for advanced drive technologies that can deliver superior performance compared to conventional systems.
Regulatory frameworks increasingly emphasize safety and reliability standards for autonomous delivery vehicles operating in public spaces. Compliance requirements mandate predictable vehicle behavior, precise path following capabilities, and fail-safe operation modes. These regulatory pressures drive demand for drive systems that offer enhanced controllability and diagnostic capabilities, positioning cycloidal drives as attractive solutions for manufacturers seeking to meet stringent certification requirements.
The competitive landscape shows established logistics companies and emerging robotics firms investing heavily in precision delivery technologies. Market dynamics favor solutions that can demonstrate measurable improvements in delivery accuracy, operational reliability, and maintenance efficiency. Cost-effectiveness remains crucial, but premium applications increasingly prioritize performance characteristics that cycloidal drives can uniquely provide, including high torque density, precise positioning, and robust operation in varying environmental conditions.
Current State and Challenges of Cycloidal Drives in Mobile Robotics
Cycloidal drives have emerged as a promising transmission technology for mobile robotics applications, particularly in autonomous delivery systems where precise motion control and compact design are paramount. These mechanical systems utilize the mathematical principles of cycloidal motion to achieve high reduction ratios in a single stage, making them attractive for robotic applications requiring precise positioning and smooth operation.
The current implementation of cycloidal drives in mobile robotics demonstrates significant advantages over traditional gear systems. Modern cycloidal drives can achieve reduction ratios ranging from 10:1 to 200:1 in a single stage, with typical efficiency rates exceeding 85%. Leading manufacturers such as Nabtesco, Sumitomo Drive Technologies, and SPINEA have developed specialized variants optimized for robotic applications, featuring reduced backlash levels below 1 arcminute and improved dynamic response characteristics.
However, several technical challenges continue to limit widespread adoption in autonomous delivery robots. Manufacturing precision requirements represent a primary obstacle, as cycloidal drives demand extremely tight tolerances to maintain optimal performance. The complex geometry of cycloidal discs and pin arrangements requires advanced machining capabilities, resulting in higher production costs compared to conventional planetary gear systems. Additionally, the multi-contact nature of cycloidal drives introduces complexity in lubrication management and wear prediction.
Dynamic performance limitations pose another significant challenge for path tracking applications. While cycloidal drives excel in static positioning accuracy, their response to rapid directional changes can introduce lag that affects real-time path correction capabilities. The inherent flexibility in the drive system, while beneficial for shock absorption, can compromise the immediate response required for precise trajectory following in dynamic environments.
Thermal management presents ongoing concerns, particularly in continuous operation scenarios typical of delivery robots. The multiple contact points generate heat that can affect lubricant properties and dimensional stability, potentially degrading tracking accuracy over extended operational periods. Current solutions involve sophisticated thermal monitoring and adaptive control algorithms, but these add system complexity and cost.
Integration challenges with modern robotic control systems also persist. The nonlinear characteristics of cycloidal drives require specialized control algorithms that differ significantly from those developed for conventional servo systems. Sensor integration for position feedback and health monitoring remains complex due to the drive's internal geometry and the need for real-time performance data to support advanced path tracking algorithms.
The current implementation of cycloidal drives in mobile robotics demonstrates significant advantages over traditional gear systems. Modern cycloidal drives can achieve reduction ratios ranging from 10:1 to 200:1 in a single stage, with typical efficiency rates exceeding 85%. Leading manufacturers such as Nabtesco, Sumitomo Drive Technologies, and SPINEA have developed specialized variants optimized for robotic applications, featuring reduced backlash levels below 1 arcminute and improved dynamic response characteristics.
However, several technical challenges continue to limit widespread adoption in autonomous delivery robots. Manufacturing precision requirements represent a primary obstacle, as cycloidal drives demand extremely tight tolerances to maintain optimal performance. The complex geometry of cycloidal discs and pin arrangements requires advanced machining capabilities, resulting in higher production costs compared to conventional planetary gear systems. Additionally, the multi-contact nature of cycloidal drives introduces complexity in lubrication management and wear prediction.
Dynamic performance limitations pose another significant challenge for path tracking applications. While cycloidal drives excel in static positioning accuracy, their response to rapid directional changes can introduce lag that affects real-time path correction capabilities. The inherent flexibility in the drive system, while beneficial for shock absorption, can compromise the immediate response required for precise trajectory following in dynamic environments.
Thermal management presents ongoing concerns, particularly in continuous operation scenarios typical of delivery robots. The multiple contact points generate heat that can affect lubricant properties and dimensional stability, potentially degrading tracking accuracy over extended operational periods. Current solutions involve sophisticated thermal monitoring and adaptive control algorithms, but these add system complexity and cost.
Integration challenges with modern robotic control systems also persist. The nonlinear characteristics of cycloidal drives require specialized control algorithms that differ significantly from those developed for conventional servo systems. Sensor integration for position feedback and health monitoring remains complex due to the drive's internal geometry and the need for real-time performance data to support advanced path tracking algorithms.
Existing Path Tracking Solutions Using Cycloidal Drives
01 Control algorithms for cycloidal drive path tracking
Advanced control algorithms are developed to improve the accuracy and precision of path tracking in cycloidal drive systems. These algorithms incorporate feedback control mechanisms, predictive control strategies, and adaptive control methods to compensate for mechanical variations and external disturbances. The control systems utilize real-time position feedback and error correction to maintain precise trajectory following in robotic and automation applications.- Control algorithms for cycloidal drive path tracking: Advanced control algorithms are developed to ensure precise path tracking in cycloidal drive systems. These algorithms incorporate feedback control mechanisms, predictive control strategies, and adaptive control methods to compensate for system nonlinearities and disturbances. The control systems utilize real-time position and velocity feedback to maintain accurate trajectory following and minimize tracking errors in robotic and automation applications.
- Sensor integration and feedback systems: Integration of various sensors including encoders, accelerometers, and position sensors enables real-time monitoring and feedback for cycloidal drive path tracking systems. These sensor systems provide critical data for closed-loop control, allowing for precise position determination and velocity measurement. The feedback mechanisms ensure accurate path following by continuously monitoring the actual position against the desired trajectory.
- Mathematical modeling and trajectory planning: Comprehensive mathematical models are developed to describe the kinematic and dynamic behavior of cycloidal drives in path tracking applications. These models incorporate gear ratio calculations, backlash compensation, and motion planning algorithms to generate optimal trajectories. The mathematical framework enables prediction of system behavior and facilitates the design of effective control strategies for precise path following.
- Mechanical design optimization for path accuracy: Mechanical design improvements focus on reducing backlash, minimizing friction, and enhancing structural rigidity to improve path tracking accuracy in cycloidal drive systems. Design modifications include optimized gear tooth profiles, improved bearing arrangements, and enhanced manufacturing tolerances. These mechanical enhancements directly contribute to better path tracking performance by reducing mechanical errors and improving system repeatability.
- Compensation techniques for tracking errors: Various compensation techniques are employed to minimize tracking errors in cycloidal drive systems, including backlash compensation, thermal drift correction, and wear compensation algorithms. These methods utilize predictive models and adaptive algorithms to counteract systematic errors and maintain tracking accuracy over extended operation periods. The compensation strategies are implemented through software algorithms that adjust control parameters in real-time.
02 Mechanical design optimization for path accuracy
The mechanical structure and design parameters of cycloidal drives are optimized to enhance path tracking performance. This includes modifications to gear tooth profiles, bearing arrangements, and housing configurations to minimize backlash and improve transmission accuracy. Design improvements focus on reducing mechanical play and increasing stiffness to achieve better positional repeatability and smoother motion profiles.Expand Specific Solutions03 Sensor integration and feedback systems
Various sensor technologies are integrated into cycloidal drive systems to provide accurate position and velocity feedback for path tracking applications. These systems employ encoders, resolvers, and other position sensing devices to monitor the actual position and compare it with the desired trajectory. The feedback information is used to implement closed-loop control and real-time path correction capabilities.Expand Specific Solutions04 Compensation methods for cycloidal drive nonlinearities
Specialized compensation techniques are developed to address inherent nonlinearities and periodic errors in cycloidal drive mechanisms during path tracking operations. These methods include mathematical modeling of transmission errors, harmonic compensation algorithms, and calibration procedures to correct for manufacturing tolerances and assembly variations. The compensation strategies improve overall system accuracy and reduce tracking errors.Expand Specific Solutions05 Multi-axis coordination and trajectory planning
Coordinated control strategies for multi-axis systems utilizing cycloidal drives enable complex path tracking and trajectory execution. These approaches involve synchronized motion control across multiple degrees of freedom, interpolation algorithms for smooth path generation, and coordination methods to maintain precise relative positioning between axes. The systems support various motion profiles including linear, circular, and complex curved trajectories.Expand Specific Solutions
Key Players in Cycloidal Drive and Autonomous Delivery Industry
The cycloidal drives for autonomous delivery path tracking technology represents an emerging sector within the broader autonomous vehicle and robotics industry, currently in its early development stage with significant growth potential. The market encompasses diverse applications from last-mile delivery to industrial automation, with estimated valuations reaching billions as autonomous delivery systems gain commercial traction. Technology maturity varies considerably across market participants, with established automotive giants like GM Global Technology Operations, Volvo Lastvagnar, and Hyundai Mnsoft leveraging decades of mechanical engineering expertise, while specialized autonomous vehicle companies such as TuSimple, Aurora Operations, and 42dot focus on integrating advanced AI-driven path tracking systems. Chinese players including Guangzhou Xiaopeng Motors and various JD.com subsidiaries are rapidly advancing through substantial R&D investments, complemented by strong academic research from institutions like Zhejiang University and Nanjing University of Science & Technology, creating a competitive landscape where traditional automotive expertise meets cutting-edge autonomous navigation technologies.
GM Global Technology Operations LLC
Technical Solution: GM has developed advanced path tracking systems for autonomous delivery vehicles utilizing cycloidal drive mechanisms integrated with their Ultium platform. Their approach combines high-precision gear reduction systems with adaptive control algorithms that enable smooth trajectory following in urban delivery scenarios. The cycloidal drives provide exceptional torque density and backlash-free operation, crucial for precise steering control during package delivery operations. GM's system incorporates real-time path correction algorithms that work seamlessly with their Super Cruise technology, allowing delivery vehicles to maintain accurate positioning within centimeter-level precision while navigating complex delivery routes.
Strengths: Proven automotive expertise and integration with existing autonomous platforms. Weaknesses: Limited focus specifically on delivery applications compared to passenger vehicles.
Aurora Operations, Inc.
Technical Solution: Aurora has pioneered the integration of cycloidal drives in their Aurora Driver platform specifically for autonomous delivery applications. Their system utilizes precision cycloidal gear systems in steering actuators that provide ultra-smooth path tracking capabilities essential for last-mile delivery operations. The technology features advanced predictive path planning algorithms that work in conjunction with high-ratio cycloidal drives to ensure precise vehicle positioning during complex delivery maneuvers such as curbside parking and tight space navigation. Aurora's approach emphasizes the cycloidal drive's inherent shock resistance and precise motion control, making it ideal for delivery vehicles operating in varied urban environments with frequent stop-and-go operations.
Strengths: Specialized focus on autonomous delivery with proven commercial partnerships. Weaknesses: Relatively newer company with limited manufacturing scale compared to traditional automotive OEMs.
Core Innovations in Cycloidal Drive Path Control Technologies
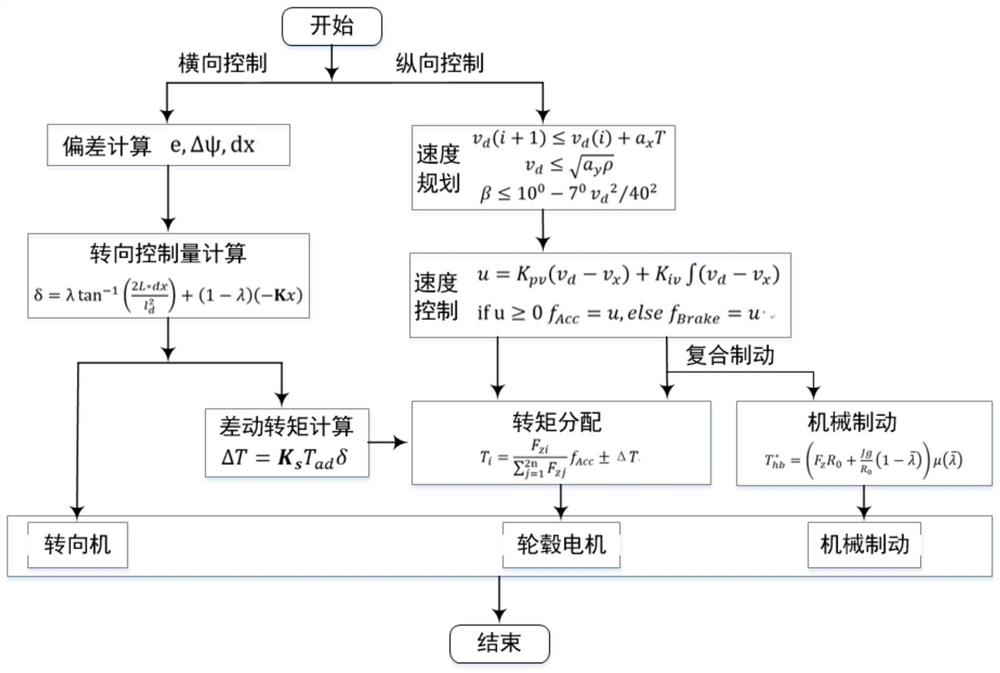
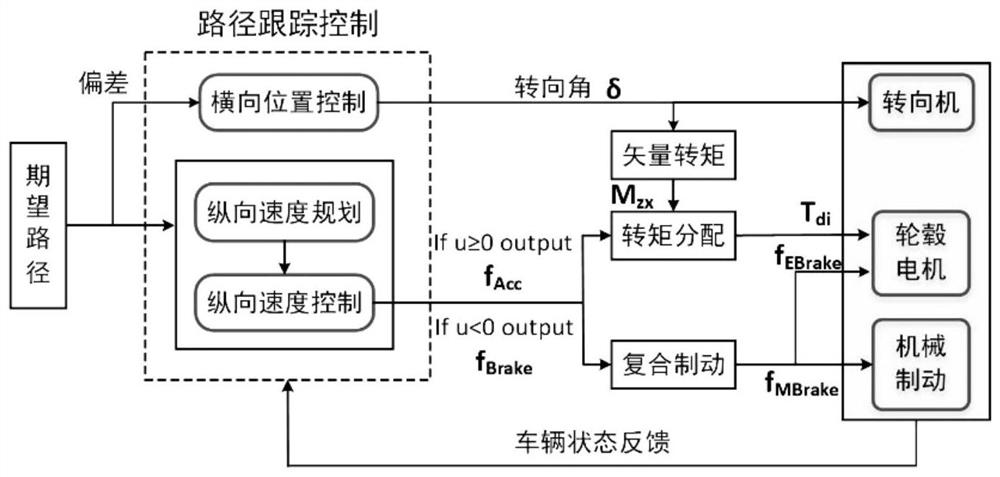
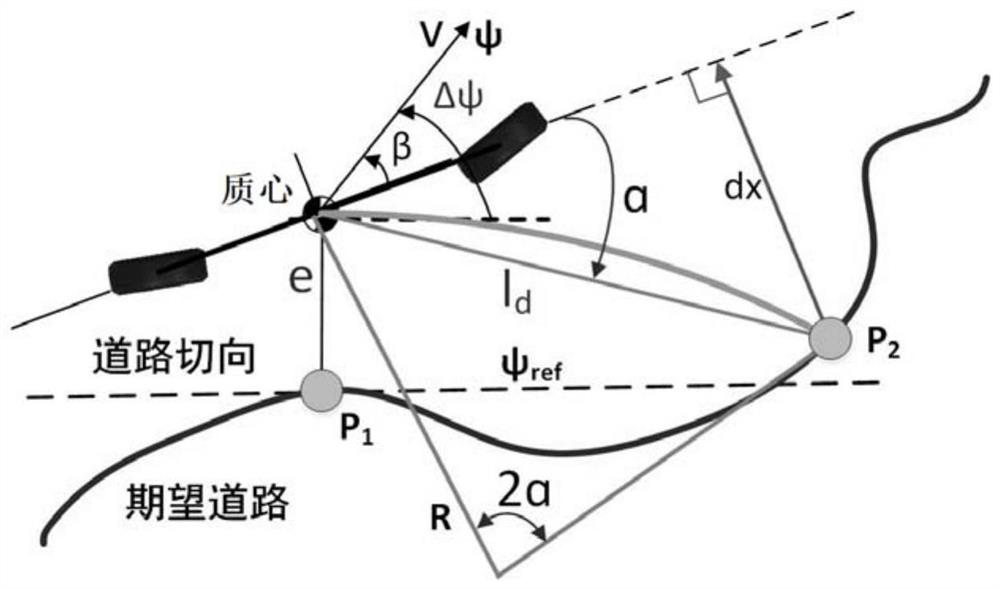
Distributed driving unmanned vehicle path tracking control method and system
PatentActiveCN112506183A
Innovation
- A lateral control scheme is adopted that directly maps the deviation control to the composite steering control quantity. The steering angle and longitudinal control quantity are calculated through a combined feedback control algorithm, and multi-wheel independent torque and composite braking are used to improve the response bandwidth and control accuracy.

Automatic guided vehicle and curve path tracking method and control device thereof
PatentActiveCN112947487B
Innovation
- By obtaining the current position information, the target trajectory point is determined, the first rotation angular velocity is calculated based on the radius of curvature and the ideal linear velocity, the second rotation angular velocity is calculated based on the yaw information, and finally the target rotation angular velocity is weighted to perform motion control to reduce or Eliminate bias.




Safety Standards for Autonomous Delivery Vehicle Systems
The integration of cycloidal drives in autonomous delivery vehicles necessitates comprehensive safety standards that address both mechanical reliability and operational safety protocols. Current regulatory frameworks primarily focus on traditional automotive systems, creating significant gaps in addressing the unique characteristics of cycloidal drive mechanisms and their interaction with autonomous navigation systems.
Existing safety standards such as ISO 26262 for functional safety in automotive systems provide foundational principles but require substantial adaptation for cycloidal drive applications. The precise gear reduction ratios and inherent backlash characteristics of cycloidal drives demand specialized testing protocols that evaluate performance under various load conditions and environmental factors. Traditional safety assessments often overlook the specific failure modes associated with cycloidal mechanisms, including eccentric bearing wear and cam follower degradation.
International standards organizations are developing new frameworks specifically for autonomous delivery systems. The Society of Automotive Engineers (SAE) has initiated working groups to establish safety criteria for robotic delivery vehicles, with particular attention to drive system reliability. These emerging standards emphasize the need for redundant safety systems and fail-safe mechanisms that can compensate for cycloidal drive malfunctions during critical path-tracking operations.
Key safety requirements include real-time monitoring of drive system performance, predictive maintenance protocols, and emergency stop capabilities that account for the mechanical characteristics of cycloidal drives. The standards mandate continuous assessment of gear mesh integrity, lubrication system effectiveness, and thermal management to prevent catastrophic failures during autonomous operations.
Compliance verification requires extensive testing protocols that simulate real-world delivery scenarios, including variable payload conditions, diverse terrain challenges, and extreme weather exposure. These standards also establish minimum performance thresholds for path-tracking accuracy and response time requirements that cycloidal drive systems must consistently meet to ensure safe autonomous operation in urban delivery environments.
Existing safety standards such as ISO 26262 for functional safety in automotive systems provide foundational principles but require substantial adaptation for cycloidal drive applications. The precise gear reduction ratios and inherent backlash characteristics of cycloidal drives demand specialized testing protocols that evaluate performance under various load conditions and environmental factors. Traditional safety assessments often overlook the specific failure modes associated with cycloidal mechanisms, including eccentric bearing wear and cam follower degradation.
International standards organizations are developing new frameworks specifically for autonomous delivery systems. The Society of Automotive Engineers (SAE) has initiated working groups to establish safety criteria for robotic delivery vehicles, with particular attention to drive system reliability. These emerging standards emphasize the need for redundant safety systems and fail-safe mechanisms that can compensate for cycloidal drive malfunctions during critical path-tracking operations.
Key safety requirements include real-time monitoring of drive system performance, predictive maintenance protocols, and emergency stop capabilities that account for the mechanical characteristics of cycloidal drives. The standards mandate continuous assessment of gear mesh integrity, lubrication system effectiveness, and thermal management to prevent catastrophic failures during autonomous operations.
Compliance verification requires extensive testing protocols that simulate real-world delivery scenarios, including variable payload conditions, diverse terrain challenges, and extreme weather exposure. These standards also establish minimum performance thresholds for path-tracking accuracy and response time requirements that cycloidal drive systems must consistently meet to ensure safe autonomous operation in urban delivery environments.
Environmental Impact of Precision Drive Autonomous Delivery
The integration of cycloidal drives in autonomous delivery systems presents significant environmental advantages compared to traditional mechanical transmission systems. These precision drive mechanisms contribute to reduced energy consumption through their inherent high efficiency ratings, typically exceeding 85-90% in power transmission. The compact design and reduced mechanical complexity of cycloidal drives eliminate the need for multiple gear stages, resulting in lower material consumption during manufacturing and reduced waste generation throughout the product lifecycle.
Carbon footprint reduction represents a primary environmental benefit of precision drive autonomous delivery systems. The enhanced accuracy and smooth motion control provided by cycloidal drives enable optimized delivery routes and reduced energy waste during operation. Studies indicate that autonomous delivery vehicles equipped with precision drive systems can achieve up to 25% improvement in energy efficiency compared to conventional drive mechanisms, directly translating to lower greenhouse gas emissions per delivery operation.
The durability characteristics of cycloidal drives significantly impact environmental sustainability metrics. These systems demonstrate extended operational lifespans due to reduced wear patterns and distributed load mechanisms, resulting in decreased replacement frequency and associated manufacturing environmental costs. The reduced maintenance requirements minimize the need for lubricants and replacement components, further decreasing the environmental impact of delivery fleet operations.
Noise pollution reduction emerges as an additional environmental consideration for urban delivery applications. Cycloidal drives operate with substantially lower acoustic signatures compared to traditional gear systems, contributing to reduced urban noise pollution levels. This characteristic becomes particularly relevant for nighttime delivery operations in residential areas, supporting sustainable urban logistics practices.
The recyclability potential of cycloidal drive components enhances the overall environmental profile of autonomous delivery systems. The simplified mechanical structure and reduced use of exotic materials facilitate end-of-life recycling processes. Material composition analysis indicates that over 90% of cycloidal drive components can be effectively recycled through existing industrial processes, supporting circular economy principles in autonomous delivery infrastructure development.
Resource efficiency optimization through precision control capabilities enables autonomous delivery systems to minimize unnecessary energy expenditure during path tracking operations. The precise motion control reduces overshooting and correction cycles, resulting in more efficient battery utilization and extended operational ranges per charging cycle.
Carbon footprint reduction represents a primary environmental benefit of precision drive autonomous delivery systems. The enhanced accuracy and smooth motion control provided by cycloidal drives enable optimized delivery routes and reduced energy waste during operation. Studies indicate that autonomous delivery vehicles equipped with precision drive systems can achieve up to 25% improvement in energy efficiency compared to conventional drive mechanisms, directly translating to lower greenhouse gas emissions per delivery operation.
The durability characteristics of cycloidal drives significantly impact environmental sustainability metrics. These systems demonstrate extended operational lifespans due to reduced wear patterns and distributed load mechanisms, resulting in decreased replacement frequency and associated manufacturing environmental costs. The reduced maintenance requirements minimize the need for lubricants and replacement components, further decreasing the environmental impact of delivery fleet operations.
Noise pollution reduction emerges as an additional environmental consideration for urban delivery applications. Cycloidal drives operate with substantially lower acoustic signatures compared to traditional gear systems, contributing to reduced urban noise pollution levels. This characteristic becomes particularly relevant for nighttime delivery operations in residential areas, supporting sustainable urban logistics practices.
The recyclability potential of cycloidal drive components enhances the overall environmental profile of autonomous delivery systems. The simplified mechanical structure and reduced use of exotic materials facilitate end-of-life recycling processes. Material composition analysis indicates that over 90% of cycloidal drive components can be effectively recycled through existing industrial processes, supporting circular economy principles in autonomous delivery infrastructure development.
Resource efficiency optimization through precision control capabilities enables autonomous delivery systems to minimize unnecessary energy expenditure during path tracking operations. The precise motion control reduces overshooting and correction cycles, resulting in more efficient battery utilization and extended operational ranges per charging cycle.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!