

Cycloidal Drives in Visual Systems: Frame Synchronization
APR 27, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Cycloidal Drive Visual System Background and Objectives
Cycloidal drives represent a sophisticated mechanical transmission technology that has evolved from traditional industrial automation applications into specialized precision positioning systems. These mechanisms utilize the mathematical principles of cycloidal motion, where a circle rolls around the inside or outside of another circle, creating highly precise and repeatable rotational movements. The integration of cycloidal drives into visual systems marks a significant technological convergence between mechanical precision engineering and optical imaging requirements.
The historical development of cycloidal drives traces back to early 20th-century industrial machinery, where their inherent advantages of high reduction ratios, compact design, and exceptional precision made them valuable for manufacturing applications. However, the evolution toward visual system integration began in the late 1990s when advanced imaging applications demanded unprecedented levels of positional accuracy and synchronization capabilities.
Modern visual systems, particularly those requiring frame synchronization, face increasing demands for temporal precision and mechanical stability. Traditional servo motors and gear systems often introduce backlash, vibration, and timing inconsistencies that can severely impact image quality and synchronization performance. The emergence of high-speed imaging, multi-camera arrays, and precision optical scanning applications has created a critical need for drive systems that can maintain exact positional relationships while providing smooth, predictable motion profiles.
The primary technical objective driving this technological integration centers on achieving sub-microsecond frame synchronization accuracy across multiple visual sensors or optical components. This requirement stems from applications in industrial inspection systems, scientific imaging, autonomous vehicle perception, and advanced manufacturing quality control, where temporal misalignment between visual frames can result in measurement errors or system failures.
Current technological trends indicate a growing emphasis on eliminating mechanical backlash and reducing rotational irregularities that traditional drive systems introduce into visual synchronization chains. Cycloidal drives offer theoretical advantages including zero backlash operation, high torsional stiffness, and predictable motion characteristics that align well with the stringent requirements of synchronized visual systems.
The anticipated technical outcomes include achieving frame synchronization tolerances within single-digit microsecond ranges, enabling multi-camera systems to capture temporally aligned imagery for advanced computer vision applications, and providing the mechanical foundation for next-generation optical scanning and imaging technologies that demand both precision and reliability in dynamic operating environments.
The historical development of cycloidal drives traces back to early 20th-century industrial machinery, where their inherent advantages of high reduction ratios, compact design, and exceptional precision made them valuable for manufacturing applications. However, the evolution toward visual system integration began in the late 1990s when advanced imaging applications demanded unprecedented levels of positional accuracy and synchronization capabilities.
Modern visual systems, particularly those requiring frame synchronization, face increasing demands for temporal precision and mechanical stability. Traditional servo motors and gear systems often introduce backlash, vibration, and timing inconsistencies that can severely impact image quality and synchronization performance. The emergence of high-speed imaging, multi-camera arrays, and precision optical scanning applications has created a critical need for drive systems that can maintain exact positional relationships while providing smooth, predictable motion profiles.
The primary technical objective driving this technological integration centers on achieving sub-microsecond frame synchronization accuracy across multiple visual sensors or optical components. This requirement stems from applications in industrial inspection systems, scientific imaging, autonomous vehicle perception, and advanced manufacturing quality control, where temporal misalignment between visual frames can result in measurement errors or system failures.
Current technological trends indicate a growing emphasis on eliminating mechanical backlash and reducing rotational irregularities that traditional drive systems introduce into visual synchronization chains. Cycloidal drives offer theoretical advantages including zero backlash operation, high torsional stiffness, and predictable motion characteristics that align well with the stringent requirements of synchronized visual systems.
The anticipated technical outcomes include achieving frame synchronization tolerances within single-digit microsecond ranges, enabling multi-camera systems to capture temporally aligned imagery for advanced computer vision applications, and providing the mechanical foundation for next-generation optical scanning and imaging technologies that demand both precision and reliability in dynamic operating environments.
Market Demand for Precision Visual Frame Synchronization
The demand for precision visual frame synchronization has experienced substantial growth across multiple industrial sectors, driven by the increasing complexity of modern visual systems and the need for ultra-precise timing control. This market expansion is primarily fueled by applications requiring microsecond-level synchronization accuracy, where traditional mechanical systems often fall short of performance requirements.
High-speed manufacturing environments represent a significant demand driver, particularly in semiconductor fabrication, precision assembly lines, and quality inspection systems. These applications require visual systems capable of capturing synchronized frames at extremely high frequencies while maintaining perfect temporal alignment. The integration of cycloidal drives in these systems addresses the critical need for backlash-free motion control and repeatable positioning accuracy.
The medical imaging sector has emerged as another substantial market segment, with surgical robotics and diagnostic equipment demanding unprecedented levels of frame synchronization precision. Advanced surgical procedures increasingly rely on real-time visual feedback systems where even minimal timing discrepancies can compromise operational safety and effectiveness. This has created a robust demand for mechanical drive systems that can deliver consistent, vibration-free motion control.
Aerospace and defense applications continue to drive market growth, particularly in surveillance systems, satellite imaging platforms, and autonomous vehicle navigation. These applications require visual systems capable of maintaining frame synchronization under extreme environmental conditions while delivering consistent performance over extended operational periods. The inherent robustness of cycloidal drive mechanisms makes them particularly suitable for these demanding applications.
The entertainment and broadcast industry has also contributed to market expansion, with virtual production studios and high-end cinematography equipment requiring precise camera movement synchronization. Multi-camera arrays used in volumetric capture and virtual reality content creation demand frame-perfect timing coordination, creating opportunities for advanced mechanical synchronization solutions.
Emerging applications in autonomous systems, including industrial robotics and self-driving vehicles, are generating new demand patterns. These systems require real-time visual processing with guaranteed frame timing, where mechanical precision directly impacts system reliability and safety performance. The market trend indicates a shift toward more sophisticated synchronization requirements as these technologies mature.
High-speed manufacturing environments represent a significant demand driver, particularly in semiconductor fabrication, precision assembly lines, and quality inspection systems. These applications require visual systems capable of capturing synchronized frames at extremely high frequencies while maintaining perfect temporal alignment. The integration of cycloidal drives in these systems addresses the critical need for backlash-free motion control and repeatable positioning accuracy.
The medical imaging sector has emerged as another substantial market segment, with surgical robotics and diagnostic equipment demanding unprecedented levels of frame synchronization precision. Advanced surgical procedures increasingly rely on real-time visual feedback systems where even minimal timing discrepancies can compromise operational safety and effectiveness. This has created a robust demand for mechanical drive systems that can deliver consistent, vibration-free motion control.
Aerospace and defense applications continue to drive market growth, particularly in surveillance systems, satellite imaging platforms, and autonomous vehicle navigation. These applications require visual systems capable of maintaining frame synchronization under extreme environmental conditions while delivering consistent performance over extended operational periods. The inherent robustness of cycloidal drive mechanisms makes them particularly suitable for these demanding applications.
The entertainment and broadcast industry has also contributed to market expansion, with virtual production studios and high-end cinematography equipment requiring precise camera movement synchronization. Multi-camera arrays used in volumetric capture and virtual reality content creation demand frame-perfect timing coordination, creating opportunities for advanced mechanical synchronization solutions.
Emerging applications in autonomous systems, including industrial robotics and self-driving vehicles, are generating new demand patterns. These systems require real-time visual processing with guaranteed frame timing, where mechanical precision directly impacts system reliability and safety performance. The market trend indicates a shift toward more sophisticated synchronization requirements as these technologies mature.
Current State of Cycloidal Drives in Optical Applications
Cycloidal drives have established a significant presence in optical applications, particularly in precision positioning systems for telescopes, microscopes, and advanced imaging equipment. These mechanical systems leverage the unique properties of cycloidal motion to achieve exceptional precision and smooth operation, making them increasingly valuable in visual system applications where frame synchronization is critical.
In astronomical telescopes, cycloidal drives are extensively employed for mount positioning and tracking systems. Major observatory installations, including those at Palomar and Keck observatories, utilize cycloidal gear systems to maintain precise celestial tracking with minimal backlash and vibration. The inherent smoothness of cycloidal motion translates directly to improved image stability and reduced frame jitter during long-exposure imaging sequences.
Industrial machine vision systems represent another significant application domain. Companies like Cognex and Keyence have integrated cycloidal drives into their high-speed inspection systems, where precise camera positioning and synchronized frame capture are essential. These systems achieve positioning accuracies of less than 0.1 arcseconds while maintaining consistent frame timing across multiple camera arrays.
Medical imaging equipment has also embraced cycloidal drive technology, particularly in CT scanners and surgical microscopes. The smooth, continuous motion characteristics of cycloidal systems enable seamless image acquisition without the stepping artifacts common in traditional gear systems. This results in improved image quality and more reliable frame synchronization in real-time surgical applications.
Current technological implementations focus on hybrid systems that combine cycloidal mechanical drives with advanced electronic control systems. These integrated solutions utilize high-resolution encoders and real-time feedback loops to achieve sub-microsecond frame synchronization accuracy. The mechanical advantages of cycloidal drives, including high torque density and inherent vibration damping, complement electronic timing systems to create robust visual synchronization platforms.
Recent developments have seen the emergence of miniaturized cycloidal drives specifically designed for compact optical systems. These systems maintain the precision characteristics of larger implementations while fitting within the space constraints of modern digital cameras and mobile imaging devices, expanding the potential applications for frame synchronization technology.
In astronomical telescopes, cycloidal drives are extensively employed for mount positioning and tracking systems. Major observatory installations, including those at Palomar and Keck observatories, utilize cycloidal gear systems to maintain precise celestial tracking with minimal backlash and vibration. The inherent smoothness of cycloidal motion translates directly to improved image stability and reduced frame jitter during long-exposure imaging sequences.
Industrial machine vision systems represent another significant application domain. Companies like Cognex and Keyence have integrated cycloidal drives into their high-speed inspection systems, where precise camera positioning and synchronized frame capture are essential. These systems achieve positioning accuracies of less than 0.1 arcseconds while maintaining consistent frame timing across multiple camera arrays.
Medical imaging equipment has also embraced cycloidal drive technology, particularly in CT scanners and surgical microscopes. The smooth, continuous motion characteristics of cycloidal systems enable seamless image acquisition without the stepping artifacts common in traditional gear systems. This results in improved image quality and more reliable frame synchronization in real-time surgical applications.
Current technological implementations focus on hybrid systems that combine cycloidal mechanical drives with advanced electronic control systems. These integrated solutions utilize high-resolution encoders and real-time feedback loops to achieve sub-microsecond frame synchronization accuracy. The mechanical advantages of cycloidal drives, including high torque density and inherent vibration damping, complement electronic timing systems to create robust visual synchronization platforms.
Recent developments have seen the emergence of miniaturized cycloidal drives specifically designed for compact optical systems. These systems maintain the precision characteristics of larger implementations while fitting within the space constraints of modern digital cameras and mobile imaging devices, expanding the potential applications for frame synchronization technology.
Existing Frame Sync Solutions Using Cycloidal Mechanisms
01 Cycloidal gear drive mechanisms and transmission systems
Cycloidal drives utilize specialized gear mechanisms with cycloidal motion profiles to achieve high reduction ratios and precise positioning. These systems employ eccentric rotating elements that engage with stationary ring gears to create smooth, continuous motion transfer. The cycloidal motion pattern provides inherent advantages in terms of load distribution and mechanical efficiency compared to traditional gear systems.- Cycloidal drive mechanisms with timing control systems: Advanced cycloidal drive systems incorporate sophisticated timing control mechanisms to ensure precise frame synchronization. These systems utilize feedback control loops and position sensors to maintain accurate timing relationships between input and output components. The timing control systems can compensate for mechanical variations and ensure consistent performance across different operating conditions.
- Electronic synchronization interfaces for cycloidal drives: Electronic control interfaces are integrated with cycloidal drive systems to provide digital synchronization capabilities. These interfaces enable communication with external control systems and allow for real-time adjustment of drive parameters. The electronic systems can process synchronization signals and coordinate multiple drive units for complex motion control applications.
- Multi-axis coordination in cycloidal drive systems: Coordination mechanisms enable multiple cycloidal drives to work together in synchronized motion patterns. These systems employ master-slave configurations or distributed control architectures to maintain precise timing relationships between multiple axes. The coordination systems ensure that complex multi-axis movements are executed with high precision and repeatability.
- Position feedback and encoder integration: High-resolution position feedback systems are integrated with cycloidal drives to provide accurate position information for synchronization purposes. These systems utilize various encoder technologies and feedback mechanisms to monitor drive position and velocity in real-time. The feedback data is used to maintain precise synchronization and detect any deviations from desired motion profiles.
- Frame synchronization protocols and communication methods: Specialized communication protocols are implemented to enable frame synchronization between cycloidal drives and control systems. These protocols define timing standards, data exchange formats, and synchronization handshaking procedures. The communication methods ensure reliable and deterministic timing performance across distributed drive systems and enable coordination with other automation components.
02 Frame synchronization control systems for cycloidal drives
Frame synchronization in cycloidal drives involves coordinating multiple drive units or phases to maintain precise timing and positioning. Control systems monitor the rotational position and phase relationships between different components to ensure synchronized operation. These systems typically employ feedback mechanisms and position sensors to maintain accurate frame alignment during operation.Expand Specific Solutions03 Electronic control and monitoring systems
Advanced electronic control systems manage the synchronization of cycloidal drives through digital signal processing and real-time monitoring. These systems incorporate microprocessors and control algorithms to maintain precise timing relationships and compensate for mechanical variations. The electronic systems provide feedback control loops that continuously adjust drive parameters to maintain synchronization accuracy.Expand Specific Solutions04 Position sensing and feedback mechanisms
Position sensing systems in cycloidal drives employ various technologies including encoders, resolvers, and magnetic sensors to detect rotational position and speed. These feedback mechanisms provide real-time data about the drive system status and enable precise control of synchronization parameters. The sensing systems must operate reliably in industrial environments while maintaining high resolution and accuracy.Expand Specific Solutions05 Multi-axis coordination and timing control
Multi-axis cycloidal drive systems require sophisticated coordination algorithms to maintain synchronization across multiple drive units. Timing control systems manage the phase relationships between different axes while compensating for mechanical tolerances and dynamic loads. These systems enable complex motion profiles and coordinated movements in applications requiring precise multi-axis positioning and synchronization.Expand Specific Solutions
Key Players in Cycloidal Drive and Visual System Industry
The cycloidal drives in visual systems frame synchronization market represents an emerging niche within the broader display and imaging technology sector. The industry is in its early development stage, with significant growth potential driven by increasing demand for precise motion control in advanced visual applications. Market size remains relatively small but expanding, particularly in automotive displays, professional imaging, and AR/VR systems. Technology maturity varies significantly among key players. Established companies like Sony Group Corp., Sharp Corp., and Texas Instruments demonstrate advanced capabilities in display driver integration and sensor technologies. Automotive leaders including Audi AG and Volkswagen AG are driving innovation in vehicle display synchronization. Asian semiconductor specialists such as Novatek Microelectronics Corp. and Japan Display Inc. contribute specialized display controller expertise, while emerging players like Vtron Group and Pudu Technology focus on application-specific implementations, indicating a fragmented but rapidly evolving competitive landscape.
Sony Group Corp.
Technical Solution: Sony has developed advanced cycloidal drive systems for their professional camera equipment and visual display technologies. Their implementation focuses on precise frame synchronization mechanisms that utilize cycloidal gear reduction systems to achieve ultra-smooth motion control in camera gimbals and display refresh systems. The technology incorporates high-precision encoders with cycloidal drives to maintain exact timing relationships between mechanical positioning and electronic frame capture/display cycles. Sony's approach emphasizes minimizing backlash and achieving sub-pixel accuracy in visual tracking applications, particularly for broadcast and cinema equipment where frame-perfect synchronization is critical.
Strengths: Industry-leading precision in professional imaging equipment, extensive R&D resources, strong integration capabilities. Weaknesses: High cost implementation, primarily focused on premium market segments.
Huawei Technologies Co., Ltd.
Technical Solution: Huawei has integrated cycloidal drive technology into their advanced visual communication systems and AR/VR devices. Their technical approach combines cycloidal reduction gears with sophisticated frame synchronization algorithms to ensure seamless visual experiences in real-time applications. The system utilizes predictive timing control that compensates for the inherent characteristics of cycloidal motion, enabling precise coordination between mechanical actuators and display refresh cycles. Huawei's implementation particularly excels in mobile and portable visual systems where power efficiency and compact design are paramount, incorporating adaptive synchronization protocols that adjust to varying operational conditions.
Strengths: Strong integration with telecommunications infrastructure, extensive patent portfolio, cost-effective solutions. Weaknesses: Limited access to certain international markets, dependency on component suppliers.
Core Patents in Cycloidal Visual System Synchronization
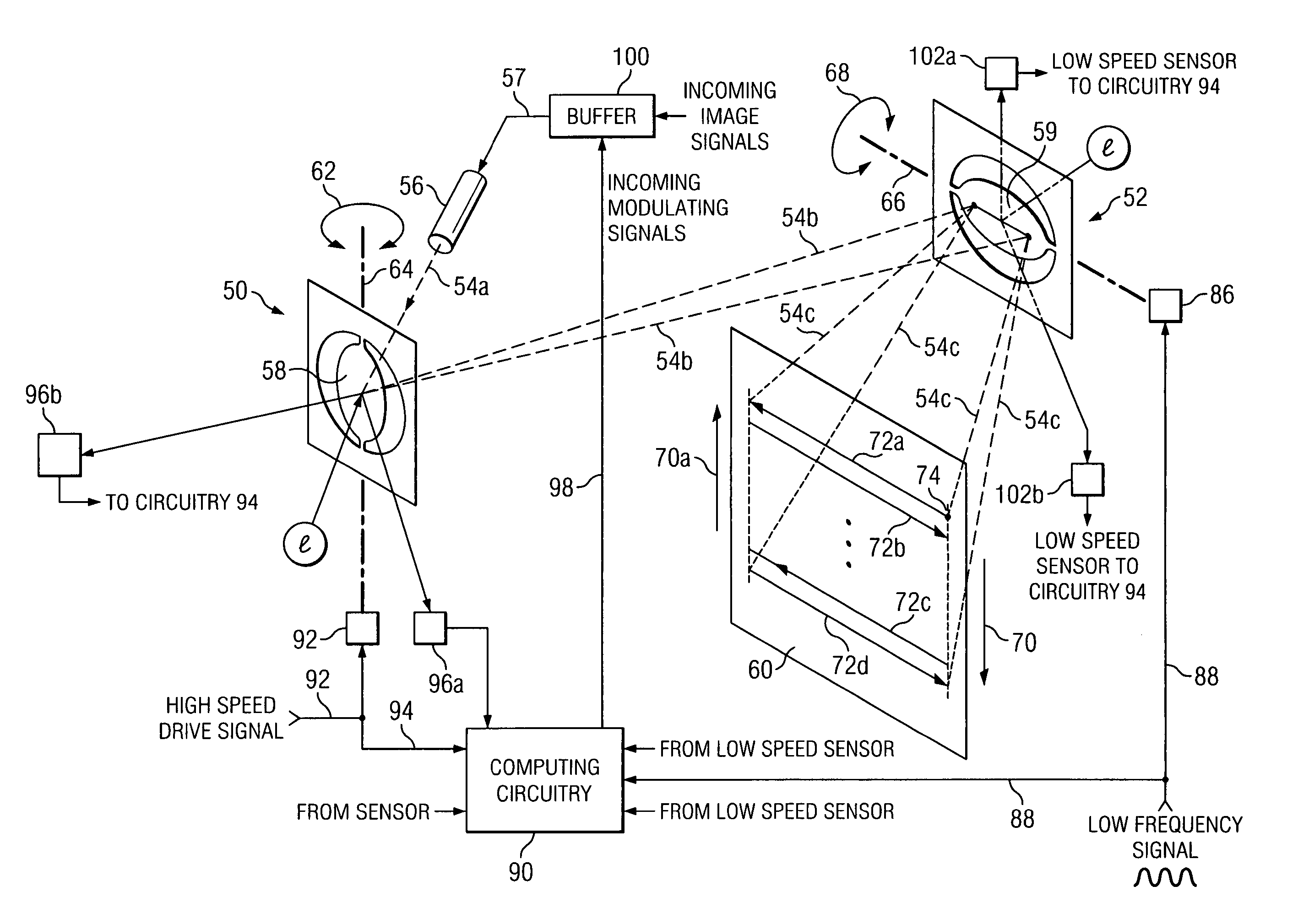
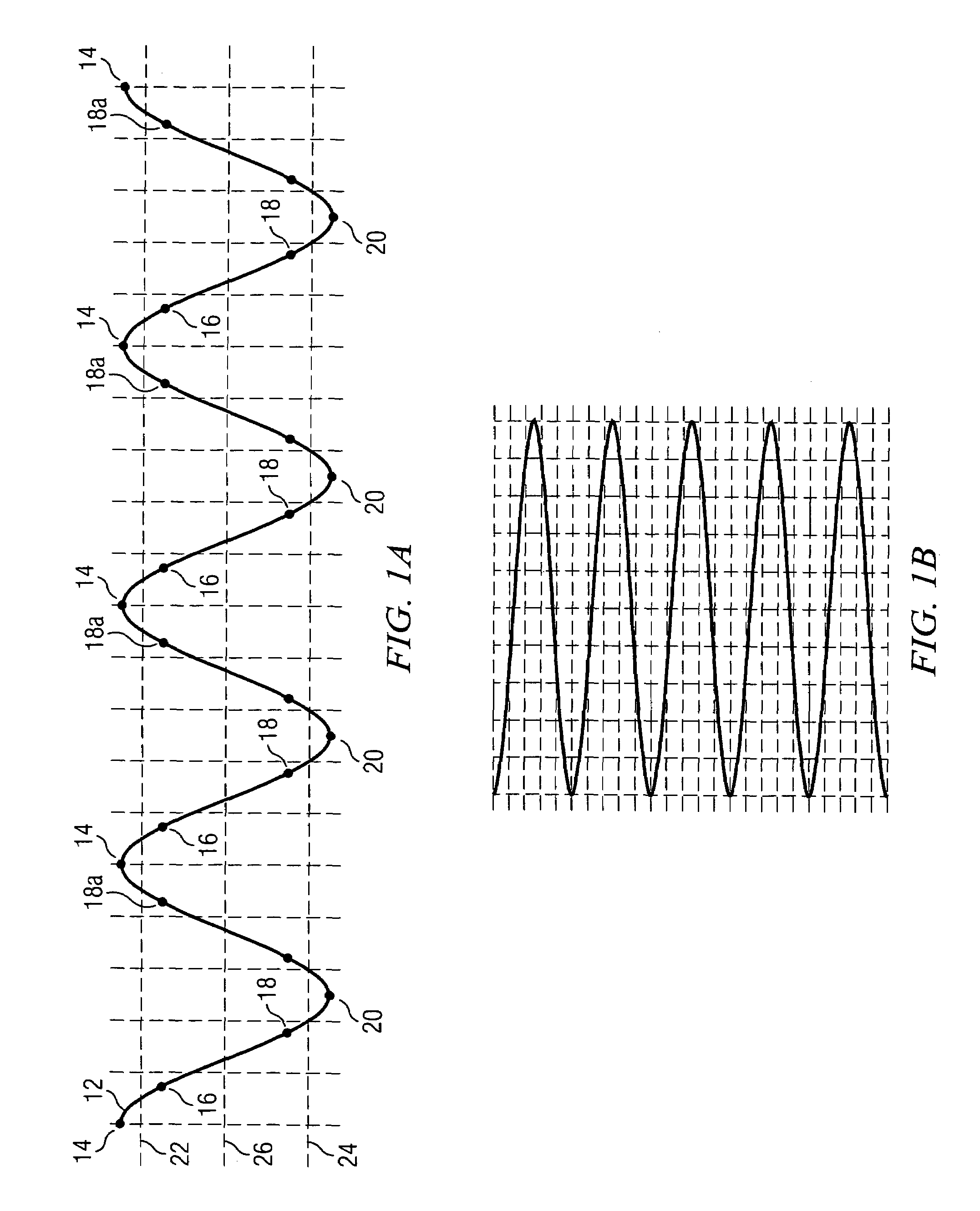
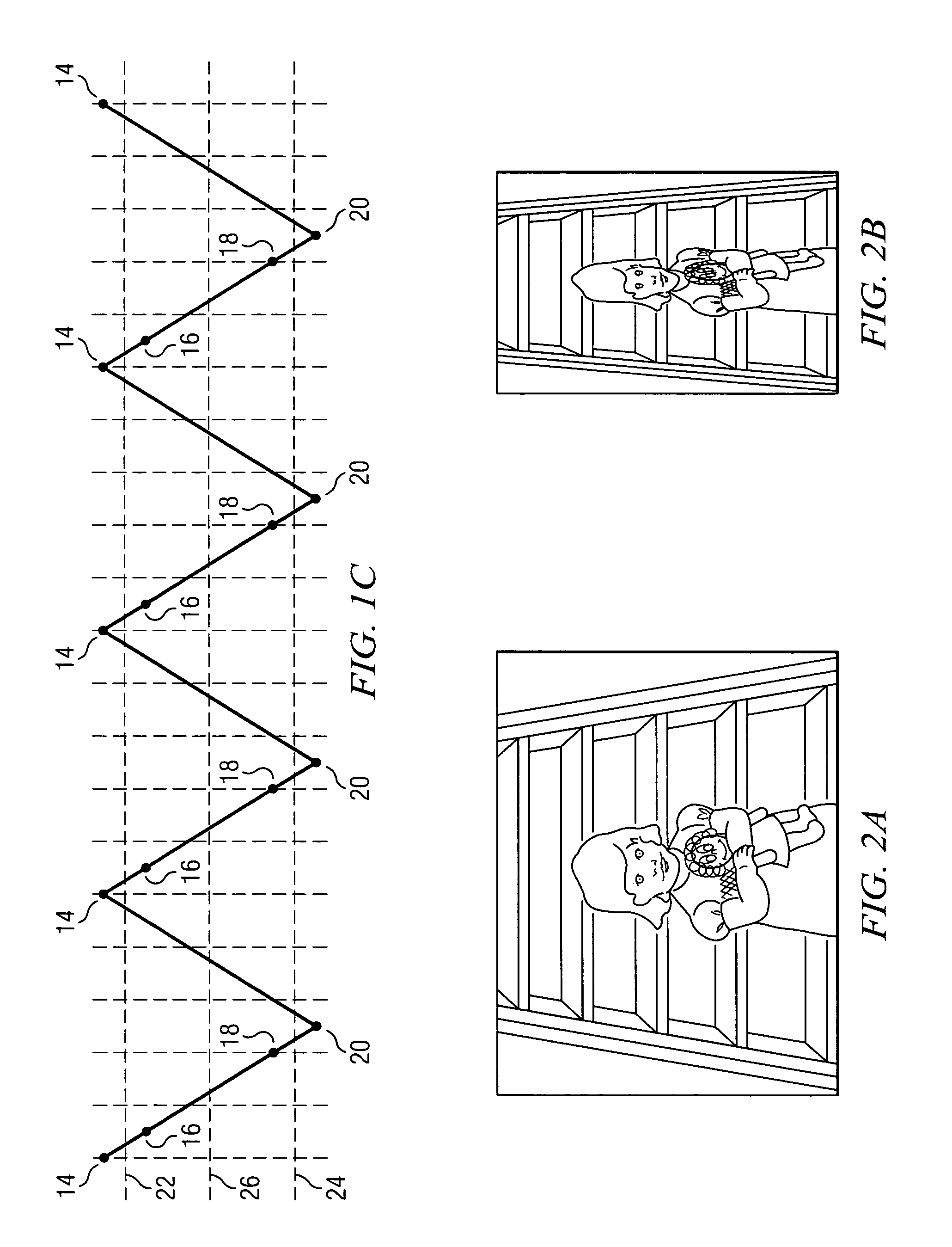
Method for synchronizing an image data source and a resonant mirror system to generate images
PatentActiveUS7599011B2
Innovation
- A method is implemented to generate a cyclic drive signal for the low-frequency mirror, adjusting peak portions to synchronize the mirror movement with incoming video frames and using a buffer to synchronize data distribution with the scanning mirror, allowing the high-speed mirror to operate at its resonant frequency while ensuring precise positioning of image lines.

Frame synchronization method and apparatus for lidar system, and computer-readable storage medium
PatentPendingEP4339638A1
Innovation
- A method and apparatus that dynamically adjust the rotation speed of the rotating mirror to match the period of the frame synchronization signal, and further adjust the phase synchronization by calculating and applying a rotation speed compensation value to ensure the rotating mirror's phase aligns with the frame synchronization signal, thereby maintaining synchronization.




Precision Manufacturing Standards for Visual Cycloidal Systems
The precision manufacturing of visual cycloidal systems demands adherence to stringent standards that ensure optimal performance in frame synchronization applications. These standards encompass dimensional tolerances, surface finish requirements, material specifications, and assembly protocols that directly impact the system's ability to maintain precise timing relationships between visual components.
Manufacturing tolerances for cycloidal drive components in visual systems typically require positional accuracy within ±0.001 inches for critical surfaces. The cycloidal disc profile must maintain geometric precision to ensure smooth motion transmission without backlash, which could introduce timing errors in frame synchronization. Surface roughness specifications generally mandate Ra values below 0.2 micrometers for bearing surfaces and gear tooth contacts to minimize friction variations that could affect synchronization stability.
Material selection standards emphasize high-strength, low-thermal-expansion alloys such as tool steels or specialized ceramics for cycloidal discs and output rings. These materials must demonstrate consistent mechanical properties across temperature ranges typically encountered in visual system operations, ensuring dimensional stability during extended operation cycles. Heat treatment protocols require precise temperature control and cooling rates to achieve uniform hardness distribution and minimize internal stresses.
Assembly standards mandate specific torque specifications for fasteners, proper lubrication procedures using low-outgassing lubricants suitable for optical environments, and comprehensive quality control checkpoints. Bearing preload settings must be calibrated to eliminate play while avoiding excessive friction that could compromise synchronization accuracy. Dynamic balancing requirements ensure smooth operation at various rotational speeds without introducing vibrations that could affect visual system performance.
Quality assurance protocols include coordinate measuring machine verification of critical dimensions, gear tooth profile analysis, and dynamic testing under simulated operational conditions. These standards collectively ensure that manufactured cycloidal drives meet the exacting requirements for frame synchronization applications in visual systems.
Manufacturing tolerances for cycloidal drive components in visual systems typically require positional accuracy within ±0.001 inches for critical surfaces. The cycloidal disc profile must maintain geometric precision to ensure smooth motion transmission without backlash, which could introduce timing errors in frame synchronization. Surface roughness specifications generally mandate Ra values below 0.2 micrometers for bearing surfaces and gear tooth contacts to minimize friction variations that could affect synchronization stability.
Material selection standards emphasize high-strength, low-thermal-expansion alloys such as tool steels or specialized ceramics for cycloidal discs and output rings. These materials must demonstrate consistent mechanical properties across temperature ranges typically encountered in visual system operations, ensuring dimensional stability during extended operation cycles. Heat treatment protocols require precise temperature control and cooling rates to achieve uniform hardness distribution and minimize internal stresses.
Assembly standards mandate specific torque specifications for fasteners, proper lubrication procedures using low-outgassing lubricants suitable for optical environments, and comprehensive quality control checkpoints. Bearing preload settings must be calibrated to eliminate play while avoiding excessive friction that could compromise synchronization accuracy. Dynamic balancing requirements ensure smooth operation at various rotational speeds without introducing vibrations that could affect visual system performance.
Quality assurance protocols include coordinate measuring machine verification of critical dimensions, gear tooth profile analysis, and dynamic testing under simulated operational conditions. These standards collectively ensure that manufactured cycloidal drives meet the exacting requirements for frame synchronization applications in visual systems.
Integration Challenges of Mechanical-Optical Hybrid Systems
The integration of cycloidal drives with optical systems presents multifaceted challenges that span mechanical precision, optical alignment, and electronic synchronization domains. These hybrid systems require seamless coordination between mechanical motion control and optical signal processing, creating complex interdependencies that must be carefully managed to achieve reliable frame synchronization performance.
Mechanical-optical interface compatibility represents a primary integration challenge. Cycloidal drives generate inherent vibrations and micro-oscillations during operation, which can significantly impact optical component stability. The mechanical mounting systems must incorporate advanced vibration isolation techniques while maintaining precise positional accuracy. Additionally, thermal expansion differences between mechanical and optical components can cause alignment drift, necessitating adaptive compensation mechanisms.
Synchronization timing precision becomes critically important when integrating these disparate systems. Cycloidal drives operate with mechanical inertia and response delays, while optical systems require nanosecond-level timing accuracy for frame capture. The integration must account for mechanical lag compensation, predictive positioning algorithms, and real-time feedback control to maintain synchronization integrity across varying operational conditions.
Environmental sensitivity amplifies integration complexity in hybrid systems. Mechanical components exhibit different thermal, humidity, and vibration responses compared to optical elements. Temperature fluctuations can cause mechanical expansion in cycloidal drives while simultaneously affecting optical path lengths and sensor performance. Integrated systems must incorporate comprehensive environmental monitoring and active compensation strategies.
Control system architecture presents another significant challenge, requiring unified command interfaces that can simultaneously manage mechanical positioning and optical timing parameters. The integration demands sophisticated software frameworks capable of real-time coordination between mechanical servo systems and optical trigger mechanisms, while maintaining deterministic response characteristics essential for frame synchronization applications.
Calibration and maintenance procedures become substantially more complex in hybrid configurations, requiring specialized expertise in both mechanical and optical domains. Long-term system stability depends on coordinated calibration protocols that account for the interdependent nature of mechanical positioning accuracy and optical alignment precision.
Mechanical-optical interface compatibility represents a primary integration challenge. Cycloidal drives generate inherent vibrations and micro-oscillations during operation, which can significantly impact optical component stability. The mechanical mounting systems must incorporate advanced vibration isolation techniques while maintaining precise positional accuracy. Additionally, thermal expansion differences between mechanical and optical components can cause alignment drift, necessitating adaptive compensation mechanisms.
Synchronization timing precision becomes critically important when integrating these disparate systems. Cycloidal drives operate with mechanical inertia and response delays, while optical systems require nanosecond-level timing accuracy for frame capture. The integration must account for mechanical lag compensation, predictive positioning algorithms, and real-time feedback control to maintain synchronization integrity across varying operational conditions.
Environmental sensitivity amplifies integration complexity in hybrid systems. Mechanical components exhibit different thermal, humidity, and vibration responses compared to optical elements. Temperature fluctuations can cause mechanical expansion in cycloidal drives while simultaneously affecting optical path lengths and sensor performance. Integrated systems must incorporate comprehensive environmental monitoring and active compensation strategies.
Control system architecture presents another significant challenge, requiring unified command interfaces that can simultaneously manage mechanical positioning and optical timing parameters. The integration demands sophisticated software frameworks capable of real-time coordination between mechanical servo systems and optical trigger mechanisms, while maintaining deterministic response characteristics essential for frame synchronization applications.
Calibration and maintenance procedures become substantially more complex in hybrid configurations, requiring specialized expertise in both mechanical and optical domains. Long-term system stability depends on coordinated calibration protocols that account for the interdependent nature of mechanical positioning accuracy and optical alignment precision.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!