How to Deploy Soft Robotics for Enhanced Surgical Precision
APR 14, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Soft Robotics in Surgery Background and Objectives
Soft robotics represents a paradigm shift in surgical technology, emerging from the convergence of materials science, robotics engineering, and medical innovation. Unlike traditional rigid robotic systems, soft robots utilize compliant materials and bio-inspired designs that can safely interact with delicate human tissues. This technology draws inspiration from natural organisms such as octopi, elephant trunks, and human muscles, which demonstrate remarkable dexterity and adaptability in confined spaces.
The evolution of soft robotics in surgery stems from the limitations of conventional surgical approaches. Traditional open surgeries require large incisions, leading to extended recovery times, increased infection risks, and significant patient trauma. While rigid robotic systems like the da Vinci platform improved precision and enabled minimally invasive procedures, they still face constraints in navigating complex anatomical structures and providing tactile feedback.
The historical development of surgical robotics began in the 1980s with computer-assisted orthopedic procedures, progressing through laparoscopic applications in the 1990s, and evolving toward soft robotic solutions in the 2010s. This technological trajectory reflects the medical community's pursuit of increasingly precise, minimally invasive, and patient-friendly surgical interventions.
Current market drivers for soft surgical robotics include aging populations requiring complex procedures, rising healthcare costs demanding efficient solutions, and patient expectations for reduced recovery times. The technology addresses critical surgical challenges including limited workspace access, tissue damage from rigid instruments, and surgeon fatigue during lengthy procedures.
The primary objective of deploying soft robotics in surgery centers on achieving unprecedented surgical precision while minimizing patient trauma. This encompasses developing systems capable of navigating tortuous pathways within the human body, providing enhanced dexterity in confined spaces, and delivering real-time tactile feedback to surgeons. Additional goals include reducing procedure times, improving surgical outcomes, and expanding the range of minimally invasive procedures possible.
The technology aims to revolutionize surgical practice by enabling procedures previously considered too risky or technically challenging, particularly in neurosurgery, cardiac interventions, and gastrointestinal procedures where precision and tissue preservation are paramount.
The evolution of soft robotics in surgery stems from the limitations of conventional surgical approaches. Traditional open surgeries require large incisions, leading to extended recovery times, increased infection risks, and significant patient trauma. While rigid robotic systems like the da Vinci platform improved precision and enabled minimally invasive procedures, they still face constraints in navigating complex anatomical structures and providing tactile feedback.
The historical development of surgical robotics began in the 1980s with computer-assisted orthopedic procedures, progressing through laparoscopic applications in the 1990s, and evolving toward soft robotic solutions in the 2010s. This technological trajectory reflects the medical community's pursuit of increasingly precise, minimally invasive, and patient-friendly surgical interventions.
Current market drivers for soft surgical robotics include aging populations requiring complex procedures, rising healthcare costs demanding efficient solutions, and patient expectations for reduced recovery times. The technology addresses critical surgical challenges including limited workspace access, tissue damage from rigid instruments, and surgeon fatigue during lengthy procedures.
The primary objective of deploying soft robotics in surgery centers on achieving unprecedented surgical precision while minimizing patient trauma. This encompasses developing systems capable of navigating tortuous pathways within the human body, providing enhanced dexterity in confined spaces, and delivering real-time tactile feedback to surgeons. Additional goals include reducing procedure times, improving surgical outcomes, and expanding the range of minimally invasive procedures possible.
The technology aims to revolutionize surgical practice by enabling procedures previously considered too risky or technically challenging, particularly in neurosurgery, cardiac interventions, and gastrointestinal procedures where precision and tissue preservation are paramount.
Market Demand for Precision Surgical Robotics
The global surgical robotics market has experienced unprecedented growth driven by increasing demand for minimally invasive procedures and enhanced surgical precision. Healthcare institutions worldwide are actively seeking advanced robotic solutions that can reduce patient trauma, minimize recovery times, and improve surgical outcomes. This demand is particularly pronounced in complex procedures such as neurosurgery, cardiac surgery, and microsurgery where precision requirements exceed human capabilities.
Aging populations across developed nations are creating substantial pressure on healthcare systems to deliver more efficient and effective surgical interventions. The rising prevalence of chronic diseases requiring surgical treatment, combined with growing patient expectations for better outcomes and shorter hospital stays, has established a robust market foundation for precision surgical robotics. Healthcare providers are increasingly recognizing that robotic-assisted procedures can address both quality and efficiency challenges simultaneously.
Soft robotics represents an emerging segment within the broader surgical robotics landscape, addressing specific limitations of traditional rigid robotic systems. The market demand for soft robotic solutions stems from their potential to provide enhanced tactile feedback, improved safety through compliant interactions with delicate tissues, and greater adaptability in confined surgical spaces. These characteristics are particularly valuable in procedures involving soft tissue manipulation and organ-sparing surgeries.
Economic factors significantly influence market adoption patterns. While initial capital investments for robotic surgical systems remain substantial, healthcare institutions are increasingly evaluating total cost of ownership including reduced complication rates, shorter procedure times, and improved patient throughput. Insurance coverage expansion for robotic-assisted procedures in key markets has further accelerated adoption rates among healthcare providers.
Regional market dynamics reveal varying adoption patterns influenced by healthcare infrastructure development, regulatory frameworks, and reimbursement policies. Developed markets demonstrate strong demand for advanced precision capabilities, while emerging markets show growing interest in cost-effective robotic solutions that can enhance surgical capabilities in resource-constrained environments.
The competitive landscape indicates sustained market growth potential as technology providers continue developing more sophisticated and accessible robotic platforms. Market demand is increasingly focused on systems offering intuitive operation, reduced training requirements, and demonstrated clinical benefits that justify investment costs through improved patient outcomes and operational efficiency.
Aging populations across developed nations are creating substantial pressure on healthcare systems to deliver more efficient and effective surgical interventions. The rising prevalence of chronic diseases requiring surgical treatment, combined with growing patient expectations for better outcomes and shorter hospital stays, has established a robust market foundation for precision surgical robotics. Healthcare providers are increasingly recognizing that robotic-assisted procedures can address both quality and efficiency challenges simultaneously.
Soft robotics represents an emerging segment within the broader surgical robotics landscape, addressing specific limitations of traditional rigid robotic systems. The market demand for soft robotic solutions stems from their potential to provide enhanced tactile feedback, improved safety through compliant interactions with delicate tissues, and greater adaptability in confined surgical spaces. These characteristics are particularly valuable in procedures involving soft tissue manipulation and organ-sparing surgeries.
Economic factors significantly influence market adoption patterns. While initial capital investments for robotic surgical systems remain substantial, healthcare institutions are increasingly evaluating total cost of ownership including reduced complication rates, shorter procedure times, and improved patient throughput. Insurance coverage expansion for robotic-assisted procedures in key markets has further accelerated adoption rates among healthcare providers.
Regional market dynamics reveal varying adoption patterns influenced by healthcare infrastructure development, regulatory frameworks, and reimbursement policies. Developed markets demonstrate strong demand for advanced precision capabilities, while emerging markets show growing interest in cost-effective robotic solutions that can enhance surgical capabilities in resource-constrained environments.
The competitive landscape indicates sustained market growth potential as technology providers continue developing more sophisticated and accessible robotic platforms. Market demand is increasingly focused on systems offering intuitive operation, reduced training requirements, and demonstrated clinical benefits that justify investment costs through improved patient outcomes and operational efficiency.
Current State and Challenges of Soft Surgical Robots
Soft surgical robotics represents a rapidly evolving field that has gained significant momentum over the past decade, driven by the need for minimally invasive procedures and enhanced surgical precision. Current soft robotic systems in surgery primarily utilize pneumatic actuation, shape memory alloys, and cable-driven mechanisms to achieve flexible manipulation capabilities. Leading platforms include continuum robots for endoscopic procedures, soft grippers for delicate tissue handling, and flexible surgical instruments that can navigate through natural body orifices.
The technological landscape is dominated by research institutions and emerging companies developing specialized soft robotic solutions. Notable systems include the da Vinci SP platform's flexible instruments, Medrobotics' Flex Robotic System, and various research prototypes from institutions like Harvard, MIT, and Stanford. These systems demonstrate varying degrees of commercial maturity, with some achieving FDA approval for specific surgical applications while others remain in experimental phases.
Despite promising developments, soft surgical robots face substantial technical challenges that limit widespread clinical adoption. Control precision remains a primary concern, as soft materials exhibit nonlinear behavior, hysteresis, and complex dynamics that are difficult to model and predict accurately. Current control algorithms struggle to achieve the submillimeter precision required for delicate surgical procedures, particularly when dealing with external forces and tissue interactions.
Sensing and feedback mechanisms present another critical limitation. Unlike rigid robotic systems, soft robots lack precise joint encoders and force sensors, making it challenging to provide surgeons with accurate haptic feedback and position information. This sensory deficit significantly impacts surgical precision and limits the surgeon's ability to perform complex manipulations with confidence.
Material durability and sterilization compatibility pose ongoing challenges for clinical implementation. Many soft materials degrade under repeated sterilization cycles or exhibit changes in mechanical properties over time, affecting system reliability and safety. Additionally, the integration of electronics and sensors within soft structures remains technically demanding while maintaining biocompatibility standards.
Regulatory approval processes for soft surgical robots are complex due to their novel nature and the difficulty in establishing standardized testing protocols. The lack of established safety standards and performance metrics specific to soft robotics creates uncertainty for manufacturers and regulatory bodies alike.
Manufacturing scalability and cost-effectiveness represent significant barriers to commercial viability. Current fabrication methods for soft robotic components often rely on manual assembly or specialized manufacturing processes that are difficult to scale for mass production, resulting in high unit costs that limit market penetration.
The technological landscape is dominated by research institutions and emerging companies developing specialized soft robotic solutions. Notable systems include the da Vinci SP platform's flexible instruments, Medrobotics' Flex Robotic System, and various research prototypes from institutions like Harvard, MIT, and Stanford. These systems demonstrate varying degrees of commercial maturity, with some achieving FDA approval for specific surgical applications while others remain in experimental phases.
Despite promising developments, soft surgical robots face substantial technical challenges that limit widespread clinical adoption. Control precision remains a primary concern, as soft materials exhibit nonlinear behavior, hysteresis, and complex dynamics that are difficult to model and predict accurately. Current control algorithms struggle to achieve the submillimeter precision required for delicate surgical procedures, particularly when dealing with external forces and tissue interactions.
Sensing and feedback mechanisms present another critical limitation. Unlike rigid robotic systems, soft robots lack precise joint encoders and force sensors, making it challenging to provide surgeons with accurate haptic feedback and position information. This sensory deficit significantly impacts surgical precision and limits the surgeon's ability to perform complex manipulations with confidence.
Material durability and sterilization compatibility pose ongoing challenges for clinical implementation. Many soft materials degrade under repeated sterilization cycles or exhibit changes in mechanical properties over time, affecting system reliability and safety. Additionally, the integration of electronics and sensors within soft structures remains technically demanding while maintaining biocompatibility standards.
Regulatory approval processes for soft surgical robots are complex due to their novel nature and the difficulty in establishing standardized testing protocols. The lack of established safety standards and performance metrics specific to soft robotics creates uncertainty for manufacturers and regulatory bodies alike.
Manufacturing scalability and cost-effectiveness represent significant barriers to commercial viability. Current fabrication methods for soft robotic components often rely on manual assembly or specialized manufacturing processes that are difficult to scale for mass production, resulting in high unit costs that limit market penetration.
Current Soft Robotics Deployment Solutions
01 Flexible actuator mechanisms for surgical manipulation
Soft robotic surgical systems utilize flexible actuator mechanisms that enable precise manipulation of surgical instruments in confined spaces. These actuators are designed with compliant materials that can bend and conform to anatomical structures while maintaining controlled movement. The flexible nature allows for safer interaction with delicate tissues and organs during minimally invasive procedures. Advanced control algorithms coordinate multiple actuators to achieve complex surgical maneuvers with high precision.- Flexible actuator mechanisms for surgical manipulation: Soft robotic surgical systems utilize flexible actuator mechanisms that enable precise manipulation of surgical instruments with enhanced dexterity. These mechanisms incorporate compliant materials and pneumatic or hydraulic actuation systems that allow for controlled bending, twisting, and extension movements. The flexible nature of these actuators provides improved access to confined anatomical spaces while maintaining precise control over surgical tool positioning and force application.
- Force sensing and haptic feedback systems: Advanced force sensing technologies integrated into soft robotic surgical platforms provide real-time haptic feedback to surgeons during procedures. These systems employ strain gauges, pressure sensors, and tactile sensing arrays embedded within the soft robotic structures to measure interaction forces between surgical tools and tissue. The feedback mechanisms enable surgeons to perceive tissue properties and apply appropriate force levels, thereby enhancing surgical precision and reducing the risk of tissue damage.
- Shape memory and adaptive compliance materials: Soft robotic surgical instruments incorporate shape memory alloys and adaptive compliance materials that can dynamically adjust their mechanical properties during surgical procedures. These materials enable surgical tools to transition between rigid states for precise manipulation and compliant states for safe tissue interaction. The adaptive nature of these materials allows for optimized performance across different surgical tasks while maintaining high precision and minimizing trauma to surrounding tissues.
- Computer vision and motion tracking for surgical guidance: Integrated computer vision systems and motion tracking technologies provide enhanced surgical guidance for soft robotic platforms. These systems utilize multiple imaging modalities, including stereoscopic cameras and depth sensors, to track the position and orientation of soft robotic instruments in real-time. Advanced algorithms process visual data to enable precise navigation, collision avoidance, and automated positioning, thereby improving overall surgical accuracy and safety.
- Miniaturized soft robotic end effectors: Miniaturized soft robotic end effectors designed for minimally invasive surgical procedures feature compact designs with multiple degrees of freedom. These end effectors incorporate soft grippers, micro-actuators, and articulated segments that can navigate through small incisions and confined anatomical pathways. The miniaturization combined with soft material properties enables delicate tissue manipulation with high precision while reducing surgical trauma and improving patient outcomes.
02 Force sensing and haptic feedback systems
Integration of force sensing capabilities in soft robotic surgical tools provides real-time feedback about tissue interaction forces. These systems incorporate sensors that detect pressure, tension, and resistance during surgical procedures, enabling surgeons to perform delicate operations with enhanced tactile awareness. The haptic feedback mechanisms translate sensed forces into perceptible signals that guide surgical precision and prevent tissue damage. Advanced signal processing techniques filter and amplify relevant force information for optimal surgical control.Expand Specific Solutions03 Shape-memory and adaptive material structures
Soft robotic surgical instruments employ shape-memory materials and adaptive structures that can change configuration in response to external stimuli. These materials enable surgical tools to navigate through tortuous anatomical pathways and adapt their shape to specific surgical tasks. The adaptive properties allow instruments to transition between rigid and compliant states as needed during procedures. Temperature-activated or electrically-controlled phase transitions provide programmable stiffness and geometry changes.Expand Specific Solutions04 Miniaturized soft robotic end-effectors
Development of miniaturized soft robotic end-effectors enables precise surgical interventions in restricted anatomical spaces. These compact devices incorporate multiple degrees of freedom within small form factors suitable for minimally invasive surgery. The soft construction materials reduce the risk of inadvertent tissue trauma while maintaining sufficient dexterity for complex surgical tasks. Modular designs allow for interchangeable end-effectors tailored to specific surgical procedures.Expand Specific Solutions05 Computer-assisted control and navigation systems
Advanced computer-assisted control systems provide precise navigation and positioning of soft robotic surgical instruments. These systems integrate imaging modalities with robotic control algorithms to enable real-time tracking and guidance during procedures. Machine learning techniques optimize motion planning and compensate for tissue deformation and physiological motion. The control architecture ensures stable and accurate instrument positioning while accommodating the compliant nature of soft robotic components.Expand Specific Solutions
Key Players in Surgical Robotics Industry
The soft robotics surgical precision market represents an emerging sector within the broader surgical robotics industry, currently in its early-to-growth stage with significant technological advancement potential. The market demonstrates substantial scale with established players like Intuitive Surgical Operations leading traditional rigid robotics, while companies such as CMR Surgical, Auris Health, and DistalMotion are pioneering flexible robotic solutions. Technology maturity varies significantly across the competitive landscape - established firms like Mazor Robotics, Globus Medical, and Smith & Nephew have proven surgical automation capabilities, while emerging players including Microport Shanghai Medical Robot, KB Medical SA, and Shandong Weigao Surgical Robot are developing next-generation soft robotics platforms. Research institutions like Harvard College, National University of Singapore, and SRI International are advancing foundational soft robotics technologies, indicating strong innovation pipeline for enhanced surgical precision applications.
Intuitive Surgical Operations, Inc.
Technical Solution: Intuitive Surgical has developed the da Vinci surgical system which incorporates soft robotics principles through flexible instruments and enhanced dexterity mechanisms. The system features wristed instruments that mimic natural hand movements with 7 degrees of freedom, providing surgeons with enhanced precision and control. The soft robotics components include flexible endoscopic tools that can navigate through complex anatomical pathways while maintaining tactile feedback. The system integrates advanced motion scaling technology that filters hand tremors and provides smooth, precise movements. Recent developments include the da Vinci X and Xi systems that offer improved instrument articulation and force feedback capabilities for minimally invasive procedures.
Strengths: Market leader with extensive clinical validation and surgeon training programs. Weaknesses: High cost and limited haptic feedback compared to emerging soft robotics solutions.
President & Fellows of Harvard College
Technical Solution: Harvard College has conducted extensive research in soft robotics for surgical applications, developing bio-inspired soft actuators and sensors for enhanced surgical precision. Their research focuses on pneumatically-driven soft robotic systems that can safely interact with delicate tissues while providing precise manipulation capabilities. Key developments include soft gripper technologies that can adapt to irregular tissue shapes and soft sensing systems that provide real-time feedback on tissue properties. The research emphasizes the development of soft materials and fabrication techniques that enable the creation of surgical instruments with variable stiffness and compliant behavior. Their work includes integration of machine learning algorithms with soft robotics hardware to enable autonomous tissue manipulation and adaptive control strategies for complex surgical procedures.
Strengths: Cutting-edge research capabilities and strong academic partnerships for innovation. Weaknesses: Limited commercial implementation and longer development timelines for clinical translation.
Core Technologies for Surgical Soft Robot Control
Soft robotic retractors
PatentActiveUS20180325507A1
Innovation
- Soft robotic actuators made from elastomeric materials that can conform to irregular spaces, deliver varying amounts of force, and be made from medically safe materials, allowing for adaptability and reduced risk of damage, with the potential for reusability or disposability, are employed to create retractors that can be used in medical procedures such as surgeries.




Method for making soft robot with stretchable coating
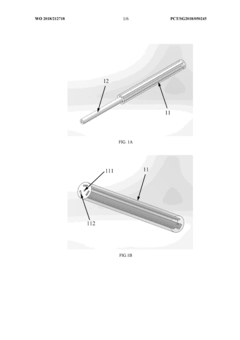
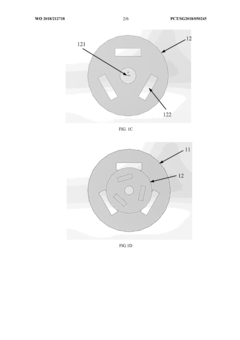
PatentWO2018212718A1
Innovation
- A method for creating a double-network hydrogel-based soft robot with a stretchable coating using a 'one-pot' process involving agarose, acrylamide, and N, N'-methylene-bisacrylamide, combined with MMT nanocoatings for enhanced mechanical stability and flame retardancy, allowing for customization and biocompatibility.
Medical Device Regulatory Framework for Robotics
The deployment of soft robotics in surgical applications operates within a complex regulatory landscape that varies significantly across global markets. In the United States, the Food and Drug Administration (FDA) classifies surgical robotic systems under medical device regulations, typically falling under Class II or Class III categories depending on risk assessment. The FDA's premarket approval process requires comprehensive clinical data demonstrating safety and efficacy, with soft robotic systems facing additional scrutiny due to their novel materials and adaptive behaviors.
European markets operate under the Medical Device Regulation (MDR), which replaced the Medical Device Directive in 2021. The MDR introduces stricter requirements for clinical evidence and post-market surveillance, particularly relevant for innovative technologies like soft robotics. Notified bodies must evaluate conformity assessments, with particular attention to biocompatibility of soft materials and long-term performance validation.
The regulatory framework addresses several critical aspects specific to soft robotics deployment. Material biocompatibility standards, such as ISO 10993 series, govern the evaluation of biological responses to soft robotic components that may contact patient tissues. Sterilization protocols must accommodate temperature-sensitive soft materials, often requiring alternative methods like gamma radiation or ethylene oxide sterilization rather than traditional steam sterilization.
Software validation presents unique challenges for soft robotic systems, as their adaptive control algorithms must comply with IEC 62304 medical device software standards. The inherent variability in soft robot behavior requires extensive validation protocols to ensure consistent performance across different surgical scenarios and patient anatomies.
Quality management systems under ISO 13485 must address the manufacturing complexities of soft robotic components, including polymer processing, sensor integration, and actuator assembly. Risk management processes following ISO 14971 must evaluate failure modes specific to soft materials, such as material fatigue, sensor drift, and pneumatic system failures.
Post-market surveillance requirements mandate continuous monitoring of soft robotic system performance, with particular emphasis on long-term material degradation and unexpected failure modes. Regulatory bodies increasingly require real-world evidence collection through registries and post-market clinical studies to validate the continued safety and effectiveness of these innovative surgical technologies.
European markets operate under the Medical Device Regulation (MDR), which replaced the Medical Device Directive in 2021. The MDR introduces stricter requirements for clinical evidence and post-market surveillance, particularly relevant for innovative technologies like soft robotics. Notified bodies must evaluate conformity assessments, with particular attention to biocompatibility of soft materials and long-term performance validation.
The regulatory framework addresses several critical aspects specific to soft robotics deployment. Material biocompatibility standards, such as ISO 10993 series, govern the evaluation of biological responses to soft robotic components that may contact patient tissues. Sterilization protocols must accommodate temperature-sensitive soft materials, often requiring alternative methods like gamma radiation or ethylene oxide sterilization rather than traditional steam sterilization.
Software validation presents unique challenges for soft robotic systems, as their adaptive control algorithms must comply with IEC 62304 medical device software standards. The inherent variability in soft robot behavior requires extensive validation protocols to ensure consistent performance across different surgical scenarios and patient anatomies.
Quality management systems under ISO 13485 must address the manufacturing complexities of soft robotic components, including polymer processing, sensor integration, and actuator assembly. Risk management processes following ISO 14971 must evaluate failure modes specific to soft materials, such as material fatigue, sensor drift, and pneumatic system failures.
Post-market surveillance requirements mandate continuous monitoring of soft robotic system performance, with particular emphasis on long-term material degradation and unexpected failure modes. Regulatory bodies increasingly require real-world evidence collection through registries and post-market clinical studies to validate the continued safety and effectiveness of these innovative surgical technologies.
Safety and Biocompatibility Standards for Surgical Robots
The deployment of soft robotics in surgical applications necessitates adherence to stringent safety and biocompatibility standards that govern medical device development and clinical implementation. These standards form the regulatory foundation ensuring patient safety while enabling technological advancement in minimally invasive surgical procedures.
International regulatory frameworks, primarily ISO 10993 series for biological evaluation of medical devices, establish comprehensive testing protocols for soft robotic materials and components. These standards mandate cytotoxicity assessments, sensitization studies, and systemic toxicity evaluations for all materials in direct or indirect patient contact. The FDA's guidance documents for robotic surgical systems further specify requirements for software validation, electromagnetic compatibility, and mechanical safety testing.
Biocompatibility considerations for soft robotics extend beyond traditional rigid surgical instruments due to the unique material properties and extended tissue contact duration. Silicone elastomers, hydrogels, and shape-memory alloys commonly used in soft robotic systems require specialized testing protocols addressing material degradation, leachable substances, and long-term tissue response. The dynamic nature of soft robotic materials introduces additional complexity in evaluating potential inflammatory responses and tissue integration effects.
Safety validation protocols must address the inherent challenges of soft robotic control systems, including force feedback mechanisms, haptic interfaces, and autonomous decision-making algorithms. Risk management standards such as ISO 14971 require comprehensive hazard analysis covering software failures, mechanical malfunctions, and human-machine interface errors. Particular attention must be given to fail-safe mechanisms that ensure predictable system behavior during unexpected operational scenarios.
Sterilization compatibility represents a critical safety consideration, as soft robotic materials must withstand repeated sterilization cycles without compromising mechanical properties or biocompatibility. Gamma radiation, ethylene oxide, and steam sterilization methods each present unique challenges for elastomeric and polymer-based components, requiring extensive validation studies to demonstrate material stability and sterility assurance levels.
Clinical validation pathways for soft robotic surgical systems typically follow a phased approach, beginning with bench testing and progressing through animal studies to human clinical trials. Regulatory bodies increasingly emphasize real-world evidence collection and post-market surveillance to monitor long-term safety outcomes and identify emerging risks associated with novel soft robotic technologies in diverse surgical applications.
International regulatory frameworks, primarily ISO 10993 series for biological evaluation of medical devices, establish comprehensive testing protocols for soft robotic materials and components. These standards mandate cytotoxicity assessments, sensitization studies, and systemic toxicity evaluations for all materials in direct or indirect patient contact. The FDA's guidance documents for robotic surgical systems further specify requirements for software validation, electromagnetic compatibility, and mechanical safety testing.
Biocompatibility considerations for soft robotics extend beyond traditional rigid surgical instruments due to the unique material properties and extended tissue contact duration. Silicone elastomers, hydrogels, and shape-memory alloys commonly used in soft robotic systems require specialized testing protocols addressing material degradation, leachable substances, and long-term tissue response. The dynamic nature of soft robotic materials introduces additional complexity in evaluating potential inflammatory responses and tissue integration effects.
Safety validation protocols must address the inherent challenges of soft robotic control systems, including force feedback mechanisms, haptic interfaces, and autonomous decision-making algorithms. Risk management standards such as ISO 14971 require comprehensive hazard analysis covering software failures, mechanical malfunctions, and human-machine interface errors. Particular attention must be given to fail-safe mechanisms that ensure predictable system behavior during unexpected operational scenarios.
Sterilization compatibility represents a critical safety consideration, as soft robotic materials must withstand repeated sterilization cycles without compromising mechanical properties or biocompatibility. Gamma radiation, ethylene oxide, and steam sterilization methods each present unique challenges for elastomeric and polymer-based components, requiring extensive validation studies to demonstrate material stability and sterility assurance levels.
Clinical validation pathways for soft robotic surgical systems typically follow a phased approach, beginning with bench testing and progressing through animal studies to human clinical trials. Regulatory bodies increasingly emphasize real-world evidence collection and post-market surveillance to monitor long-term safety outcomes and identify emerging risks associated with novel soft robotic technologies in diverse surgical applications.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!