

How to Implement Robust Control in High-Variability Environments
MAR 27, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Robust Control Background and Objectives in Variable Environments
Robust control theory emerged in the 1980s as a response to the limitations of classical control methods when dealing with system uncertainties and disturbances. Traditional control approaches often assumed perfect knowledge of system parameters and operating conditions, which rarely holds true in real-world applications. The development of robust control was driven by the need to maintain system stability and performance despite modeling errors, parameter variations, and external disturbances that are inherent in practical control systems.
The evolution of robust control has been marked by several key theoretical breakthroughs. H-infinity control theory provided a framework for designing controllers that minimize the worst-case performance degradation under bounded uncertainties. Subsequently, mu-synthesis extended these concepts to handle structured uncertainties more effectively. Linear Matrix Inequality (LMI) techniques revolutionized the computational aspects of robust control design, making complex optimization problems tractable for practical implementation.
High-variability environments present unique challenges that amplify the importance of robust control methodologies. These environments are characterized by significant fluctuations in operating conditions, unpredictable disturbances, time-varying parameters, and modeling uncertainties. Examples include aerospace systems operating across different flight regimes, industrial processes with varying feedstock properties, renewable energy systems subject to weather variations, and autonomous vehicles navigating diverse terrains and traffic conditions.
The primary objective of implementing robust control in high-variability environments is to ensure consistent system performance across the entire range of operating conditions. This involves maintaining stability margins even when system parameters deviate significantly from their nominal values. Performance objectives must be achieved not only under normal conditions but also during worst-case scenarios that may occur within the specified uncertainty bounds.
Another critical objective is to minimize the conservative nature of robust control designs while ensuring adequate protection against uncertainties. This balance requires sophisticated analysis of the trade-offs between nominal performance and robust stability. The control system must be capable of adapting to changing conditions without compromising safety or fundamental performance requirements.
Modern robust control implementation also aims to integrate real-time adaptation capabilities, allowing the control system to adjust its parameters based on observed system behavior and environmental changes. This adaptive robust approach combines the guaranteed stability properties of robust control with the flexibility needed to optimize performance in varying conditions.
The evolution of robust control has been marked by several key theoretical breakthroughs. H-infinity control theory provided a framework for designing controllers that minimize the worst-case performance degradation under bounded uncertainties. Subsequently, mu-synthesis extended these concepts to handle structured uncertainties more effectively. Linear Matrix Inequality (LMI) techniques revolutionized the computational aspects of robust control design, making complex optimization problems tractable for practical implementation.
High-variability environments present unique challenges that amplify the importance of robust control methodologies. These environments are characterized by significant fluctuations in operating conditions, unpredictable disturbances, time-varying parameters, and modeling uncertainties. Examples include aerospace systems operating across different flight regimes, industrial processes with varying feedstock properties, renewable energy systems subject to weather variations, and autonomous vehicles navigating diverse terrains and traffic conditions.
The primary objective of implementing robust control in high-variability environments is to ensure consistent system performance across the entire range of operating conditions. This involves maintaining stability margins even when system parameters deviate significantly from their nominal values. Performance objectives must be achieved not only under normal conditions but also during worst-case scenarios that may occur within the specified uncertainty bounds.
Another critical objective is to minimize the conservative nature of robust control designs while ensuring adequate protection against uncertainties. This balance requires sophisticated analysis of the trade-offs between nominal performance and robust stability. The control system must be capable of adapting to changing conditions without compromising safety or fundamental performance requirements.
Modern robust control implementation also aims to integrate real-time adaptation capabilities, allowing the control system to adjust its parameters based on observed system behavior and environmental changes. This adaptive robust approach combines the guaranteed stability properties of robust control with the flexibility needed to optimize performance in varying conditions.
Market Demand for Robust Control Systems
The global market for robust control systems is experiencing unprecedented growth driven by increasing complexity and variability in industrial processes across multiple sectors. Manufacturing industries, particularly automotive, aerospace, and semiconductor fabrication, are demanding advanced control solutions capable of maintaining performance despite significant process variations, external disturbances, and model uncertainties. These sectors require systems that can adapt to changing operational conditions while ensuring product quality and safety standards.
Energy sector applications represent another substantial market driver, with renewable energy integration creating highly variable operating environments. Wind turbines, solar power systems, and smart grid infrastructure require robust control mechanisms to handle fluctuating power generation, grid instabilities, and weather-related disturbances. The transition toward sustainable energy sources has intensified the need for control systems that can operate reliably under uncertain and rapidly changing conditions.
Autonomous systems and robotics markets are generating significant demand for robust control technologies. Self-driving vehicles, unmanned aerial vehicles, and industrial robots operate in unpredictable environments where traditional control methods often fail. These applications require control systems that can handle sensor noise, actuator failures, and environmental uncertainties while maintaining safe and reliable operation.
The aerospace and defense industries continue to be major consumers of robust control solutions, driven by stringent safety requirements and extreme operating conditions. Aircraft flight control systems, missile guidance systems, and satellite attitude control must function reliably despite atmospheric disturbances, component degradation, and hostile environments. Military applications particularly emphasize robustness against adversarial conditions and system failures.
Process industries including chemical, pharmaceutical, and petrochemical sectors are increasingly adopting robust control systems to handle complex multi-variable processes with inherent uncertainties. These industries face challenges from raw material variations, equipment aging, and regulatory compliance requirements that demand consistent performance despite process variability.
Market growth is further accelerated by Industry 4.0 initiatives and digital transformation trends. Smart manufacturing concepts require control systems that can adapt to flexible production schedules, varying product specifications, and dynamic supply chain conditions. The integration of artificial intelligence and machine learning with robust control methodologies is creating new market opportunities and expanding application domains.
Emerging markets in developing countries are contributing to demand growth as industrial infrastructure expands and modernizes. These regions often face additional challenges including power quality issues, skilled operator shortages, and harsh environmental conditions, making robust control solutions particularly valuable for ensuring reliable industrial operations.
Energy sector applications represent another substantial market driver, with renewable energy integration creating highly variable operating environments. Wind turbines, solar power systems, and smart grid infrastructure require robust control mechanisms to handle fluctuating power generation, grid instabilities, and weather-related disturbances. The transition toward sustainable energy sources has intensified the need for control systems that can operate reliably under uncertain and rapidly changing conditions.
Autonomous systems and robotics markets are generating significant demand for robust control technologies. Self-driving vehicles, unmanned aerial vehicles, and industrial robots operate in unpredictable environments where traditional control methods often fail. These applications require control systems that can handle sensor noise, actuator failures, and environmental uncertainties while maintaining safe and reliable operation.
The aerospace and defense industries continue to be major consumers of robust control solutions, driven by stringent safety requirements and extreme operating conditions. Aircraft flight control systems, missile guidance systems, and satellite attitude control must function reliably despite atmospheric disturbances, component degradation, and hostile environments. Military applications particularly emphasize robustness against adversarial conditions and system failures.
Process industries including chemical, pharmaceutical, and petrochemical sectors are increasingly adopting robust control systems to handle complex multi-variable processes with inherent uncertainties. These industries face challenges from raw material variations, equipment aging, and regulatory compliance requirements that demand consistent performance despite process variability.
Market growth is further accelerated by Industry 4.0 initiatives and digital transformation trends. Smart manufacturing concepts require control systems that can adapt to flexible production schedules, varying product specifications, and dynamic supply chain conditions. The integration of artificial intelligence and machine learning with robust control methodologies is creating new market opportunities and expanding application domains.
Emerging markets in developing countries are contributing to demand growth as industrial infrastructure expands and modernizes. These regions often face additional challenges including power quality issues, skilled operator shortages, and harsh environmental conditions, making robust control solutions particularly valuable for ensuring reliable industrial operations.
Current State and Challenges of High-Variability Control
High-variability environments present unprecedented challenges for control system implementation across multiple industrial sectors. These environments are characterized by rapid parameter changes, unpredictable disturbances, and non-stationary operating conditions that can significantly degrade traditional control performance. Manufacturing processes, aerospace systems, renewable energy installations, and autonomous vehicles frequently operate under such conditions, where system parameters may fluctuate by orders of magnitude within short timeframes.
Current robust control methodologies demonstrate varying degrees of effectiveness when confronted with high-variability scenarios. Classical H-infinity and mu-synthesis approaches provide theoretical guarantees for bounded uncertainties but often result in overly conservative designs that sacrifice performance for stability margins. These methods typically assume worst-case scenarios that may rarely occur in practice, leading to suboptimal system responses during normal operations.
Adaptive control strategies offer improved performance by adjusting controller parameters in real-time, yet they face fundamental limitations in high-variability environments. Parameter estimation algorithms may struggle with convergence when system dynamics change rapidly, potentially leading to instability during transient periods. The trade-off between adaptation speed and stability remains a critical constraint, particularly when measurement noise and unmodeled dynamics are present.
Model predictive control has emerged as a promising approach for handling variability through its inherent ability to incorporate constraints and predictions. However, computational complexity increases exponentially with uncertainty levels, making real-time implementation challenging for fast-changing systems. Robust MPC formulations often resort to conservative approximations that limit their effectiveness in highly dynamic scenarios.
Machine learning-based control methods show potential for handling complex variability patterns but face significant challenges regarding safety guarantees and interpretability. Deep reinforcement learning controllers may exhibit unpredictable behavior when encountering conditions outside their training distribution, raising concerns for safety-critical applications. The black-box nature of these approaches complicates verification and certification processes required in regulated industries.
Sensor limitations and measurement uncertainties compound the challenges in high-variability environments. Traditional state estimation techniques may fail when system models become invalid due to rapid parameter changes. The need for robust state observers that can maintain accuracy across varying operating conditions remains largely unaddressed by current methodologies.
Integration complexity represents another significant barrier, as robust control systems must interface with existing infrastructure while maintaining performance guarantees. Legacy systems often lack the computational resources or sensor capabilities required for advanced robust control implementations, necessitating careful consideration of retrofit strategies and incremental deployment approaches.
Current robust control methodologies demonstrate varying degrees of effectiveness when confronted with high-variability scenarios. Classical H-infinity and mu-synthesis approaches provide theoretical guarantees for bounded uncertainties but often result in overly conservative designs that sacrifice performance for stability margins. These methods typically assume worst-case scenarios that may rarely occur in practice, leading to suboptimal system responses during normal operations.
Adaptive control strategies offer improved performance by adjusting controller parameters in real-time, yet they face fundamental limitations in high-variability environments. Parameter estimation algorithms may struggle with convergence when system dynamics change rapidly, potentially leading to instability during transient periods. The trade-off between adaptation speed and stability remains a critical constraint, particularly when measurement noise and unmodeled dynamics are present.
Model predictive control has emerged as a promising approach for handling variability through its inherent ability to incorporate constraints and predictions. However, computational complexity increases exponentially with uncertainty levels, making real-time implementation challenging for fast-changing systems. Robust MPC formulations often resort to conservative approximations that limit their effectiveness in highly dynamic scenarios.
Machine learning-based control methods show potential for handling complex variability patterns but face significant challenges regarding safety guarantees and interpretability. Deep reinforcement learning controllers may exhibit unpredictable behavior when encountering conditions outside their training distribution, raising concerns for safety-critical applications. The black-box nature of these approaches complicates verification and certification processes required in regulated industries.
Sensor limitations and measurement uncertainties compound the challenges in high-variability environments. Traditional state estimation techniques may fail when system models become invalid due to rapid parameter changes. The need for robust state observers that can maintain accuracy across varying operating conditions remains largely unaddressed by current methodologies.
Integration complexity represents another significant barrier, as robust control systems must interface with existing infrastructure while maintaining performance guarantees. Legacy systems often lack the computational resources or sensor capabilities required for advanced robust control implementations, necessitating careful consideration of retrofit strategies and incremental deployment approaches.
Existing Robust Control Implementation Solutions
01 Adaptive control methods for robust system performance
Adaptive control techniques are employed to enhance robustness in control systems by automatically adjusting controller parameters in response to system variations and uncertainties. These methods utilize real-time feedback and parameter estimation algorithms to maintain desired performance levels despite changes in operating conditions or model inaccuracies. The adaptive mechanisms can include model reference adaptive control, self-tuning regulators, and gain scheduling approaches that continuously update control laws to ensure stability and performance robustness.- Adaptive control methods for robust system performance: Adaptive control techniques are employed to enhance robustness in control systems by dynamically adjusting controller parameters in response to system variations and uncertainties. These methods utilize real-time feedback and parameter estimation algorithms to maintain desired performance levels despite changes in operating conditions or model inaccuracies. The adaptive mechanisms can include model reference adaptive control, self-tuning regulators, and gain scheduling approaches that ensure system stability and performance across varying operational scenarios.
- Uncertainty modeling and compensation techniques: Robust control systems incorporate methods for modeling and compensating parametric uncertainties and external disturbances. These techniques involve identifying bounds on system uncertainties and designing controllers that guarantee stability and performance within these bounds. Approaches include worst-case analysis, structured and unstructured uncertainty representations, and the use of weighting functions to characterize frequency-dependent uncertainties. The compensation strategies ensure that the control system maintains acceptable performance even when faced with model mismatches and environmental variations.
- H-infinity and mu-synthesis optimization methods: Advanced optimization-based robust control design methodologies utilize mathematical frameworks to minimize the worst-case impact of disturbances and uncertainties on system performance. These methods formulate the control problem as an optimization task where performance objectives are balanced against robustness requirements. The resulting controllers are designed to achieve specified performance metrics while guaranteeing stability margins and disturbance rejection capabilities across a range of operating conditions and system variations.
- Sliding mode and variable structure control approaches: Sliding mode control techniques provide robust performance by forcing system trajectories onto predefined sliding surfaces where the system exhibits desired dynamics. These variable structure approaches are inherently robust to matched uncertainties and disturbances, offering invariance properties that maintain performance despite parameter variations. The control law switches between different structures based on system state, creating a sliding motion that is insensitive to certain classes of uncertainties and external perturbations.
- Multi-objective robust control with performance constraints: Multi-objective robust control frameworks address the challenge of simultaneously satisfying multiple performance specifications while ensuring robustness. These approaches balance competing objectives such as tracking accuracy, disturbance rejection, control effort minimization, and stability margins. The design process incorporates constraint handling mechanisms that guarantee performance requirements are met across the entire uncertainty domain, utilizing techniques such as linear matrix inequalities, convex optimization, and Pareto-optimal solution sets to achieve comprehensive robust performance.
02 H-infinity and robust optimization techniques
Advanced mathematical frameworks based on H-infinity control theory and robust optimization are utilized to design controllers that guarantee performance under worst-case scenarios. These approaches formulate the control problem as an optimization that minimizes the maximum possible deviation from desired behavior across all possible uncertainties. The resulting controllers provide guaranteed stability margins and performance bounds, making them particularly suitable for safety-critical applications where robustness is paramount.Expand Specific Solutions03 Uncertainty modeling and disturbance rejection
Robust control systems incorporate explicit modeling of uncertainties and implement disturbance rejection mechanisms to maintain performance. This includes characterizing parametric uncertainties, unmodeled dynamics, and external disturbances, then designing controllers that remain stable and effective despite these factors. Techniques such as disturbance observers, feedforward compensation, and robust state estimation are employed to actively counteract the effects of uncertainties and maintain control objectives.Expand Specific Solutions04 Multi-variable and decentralized robust control architectures
For complex systems with multiple inputs and outputs, specialized robust control architectures are developed to handle interactions and coupling effects while maintaining robustness. These include decentralized control structures where local controllers operate with limited information exchange, and coordinated multi-variable designs that account for cross-coupling. The architectures ensure that the overall system remains robust even when individual subsystems experience variations or when communication between controllers is limited.Expand Specific Solutions05 Robust stability analysis and verification methods
Systematic methods for analyzing and verifying robust stability are essential components of robust control design. These include Lyapunov-based stability analysis, frequency-domain robustness measures such as gain and phase margins, and structured singular value analysis for assessing stability under structured uncertainties. Computational tools and simulation frameworks are employed to validate that designed controllers meet robustness specifications across the entire operating envelope before implementation.Expand Specific Solutions
Key Players in Robust Control Technology Industry
The robust control technology in high-variability environments represents a mature yet rapidly evolving field, currently in an advanced development stage with significant market expansion driven by Industry 4.0 and autonomous systems demands. The market demonstrates substantial growth potential, particularly in automotive, aerospace, and industrial automation sectors, with estimated valuations reaching billions globally. Technology maturity varies significantly across applications, with established players like Siemens AG, Robert Bosch GmbH, and OMRON Corp leading industrial implementations, while research institutions including MIT, Carnegie Mellon University, and Tsinghua University drive theoretical advances. Companies such as Qualcomm and NXP Semiconductors provide essential hardware foundations, while specialized firms like dSPACE GmbH offer development tools. The competitive landscape shows strong collaboration between academic institutions and industry leaders, indicating a healthy ecosystem for continued innovation and commercial deployment.
Siemens AG
Technical Solution: Siemens implements robust control through their SIMATIC PCS 7 process control system and TIA Portal engineering framework, utilizing advanced model predictive control (MPC) algorithms and adaptive control strategies. Their approach integrates real-time data analytics with machine learning capabilities to automatically adjust control parameters in response to environmental variations. The system employs redundant sensor networks and fault-tolerant architectures to maintain stability even when individual components fail. Siemens' robust control solutions feature distributed control architectures that can handle process variations up to 40% while maintaining system performance within acceptable bounds.
Strengths: Proven industrial track record with comprehensive integration capabilities and strong fault tolerance mechanisms. Weaknesses: High implementation costs and complexity requiring specialized expertise for deployment and maintenance.
Robert Bosch GmbH
Technical Solution: Bosch develops robust control systems primarily for automotive applications, focusing on adaptive control algorithms that handle vehicle dynamics under varying road conditions, weather, and load scenarios. Their Electronic Stability Program (ESP) and adaptive cruise control systems utilize H-infinity control theory and sliding mode control techniques to maintain vehicle stability across diverse operating conditions. The company's approach incorporates sensor fusion from multiple sources including radar, lidar, and camera systems to create redundant feedback loops. Bosch's robust control framework can adapt to parameter uncertainties of up to 30% in real-time while ensuring safety-critical performance standards.
Strengths: Extensive automotive expertise with proven safety-critical applications and real-world validation. Weaknesses: Limited applicability outside automotive domain and dependency on proprietary sensor ecosystems.
Core Innovations in Uncertainty Handling Algorithms
Robust control system for designing logic for imperfect model
PatentInactiveUS5724239A
Innovation
- A robust control apparatus that generates a dynamics model considering errors in coefficient matrices and random disturbances, using a partial input optimization method to minimize tracking errors and control energy, even with imperfect models, by treating the system as a stochastic model and optimizing the selective partial input based on a robust quadratic optimization criterion.




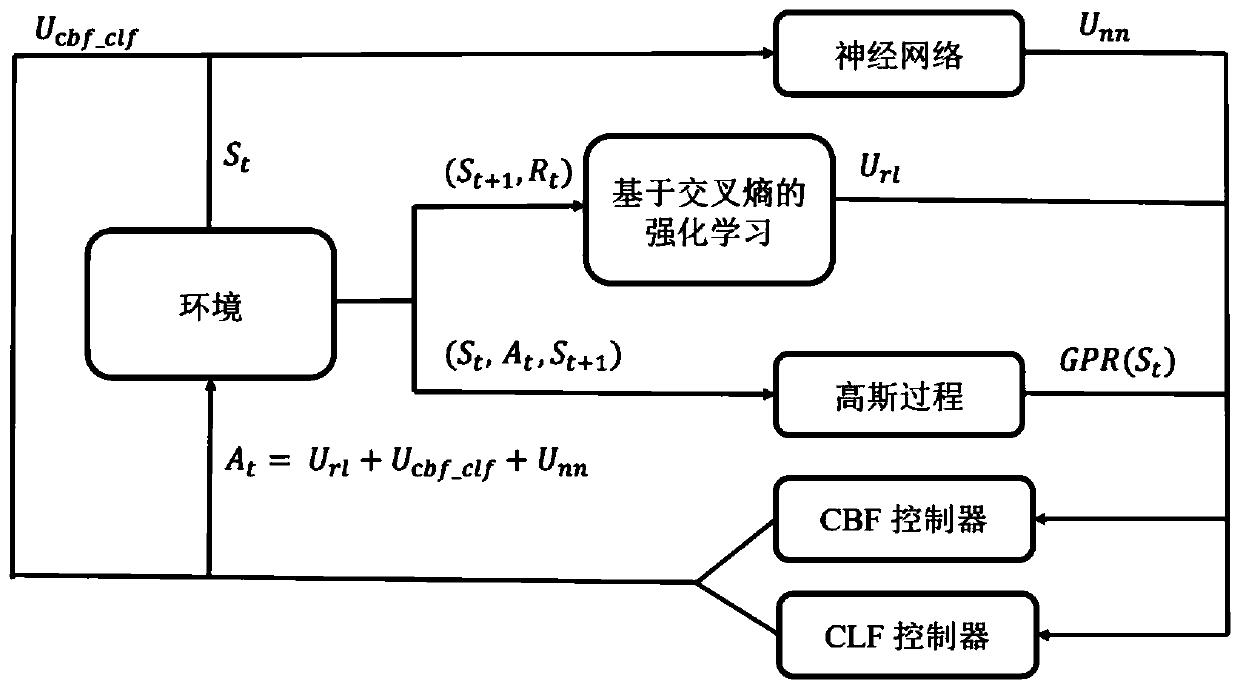
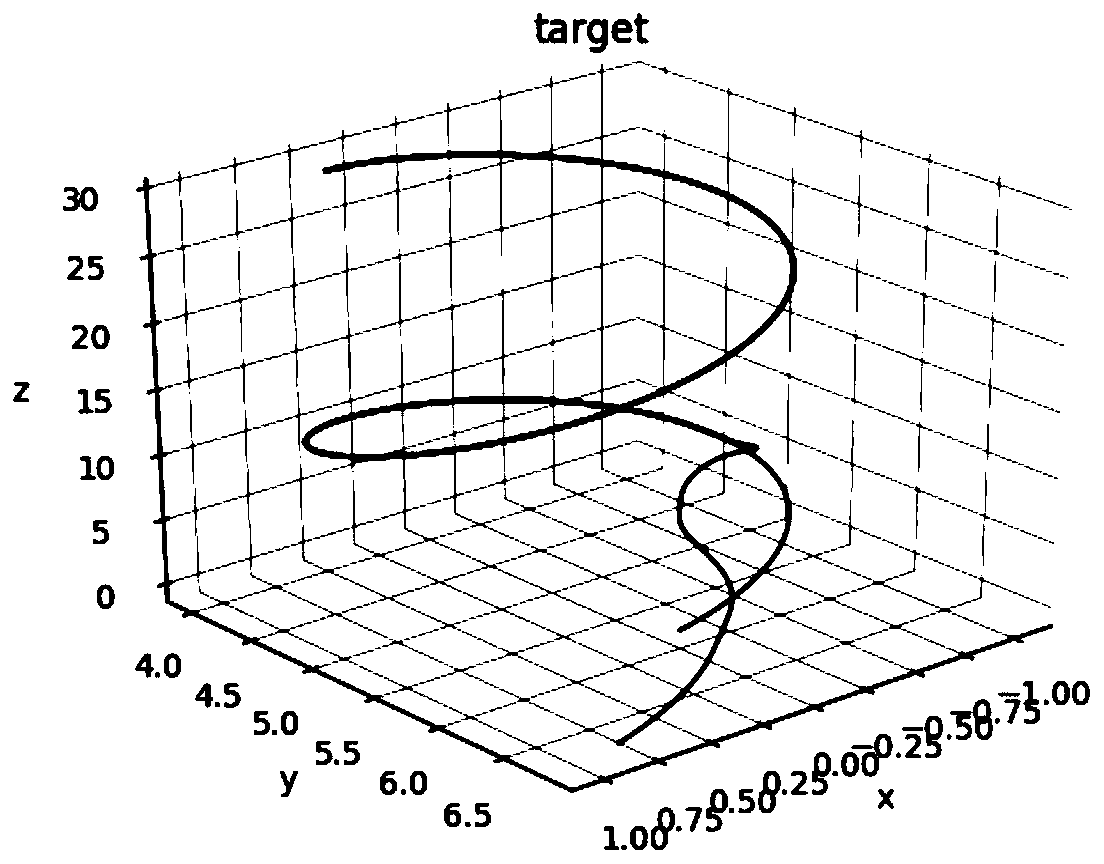
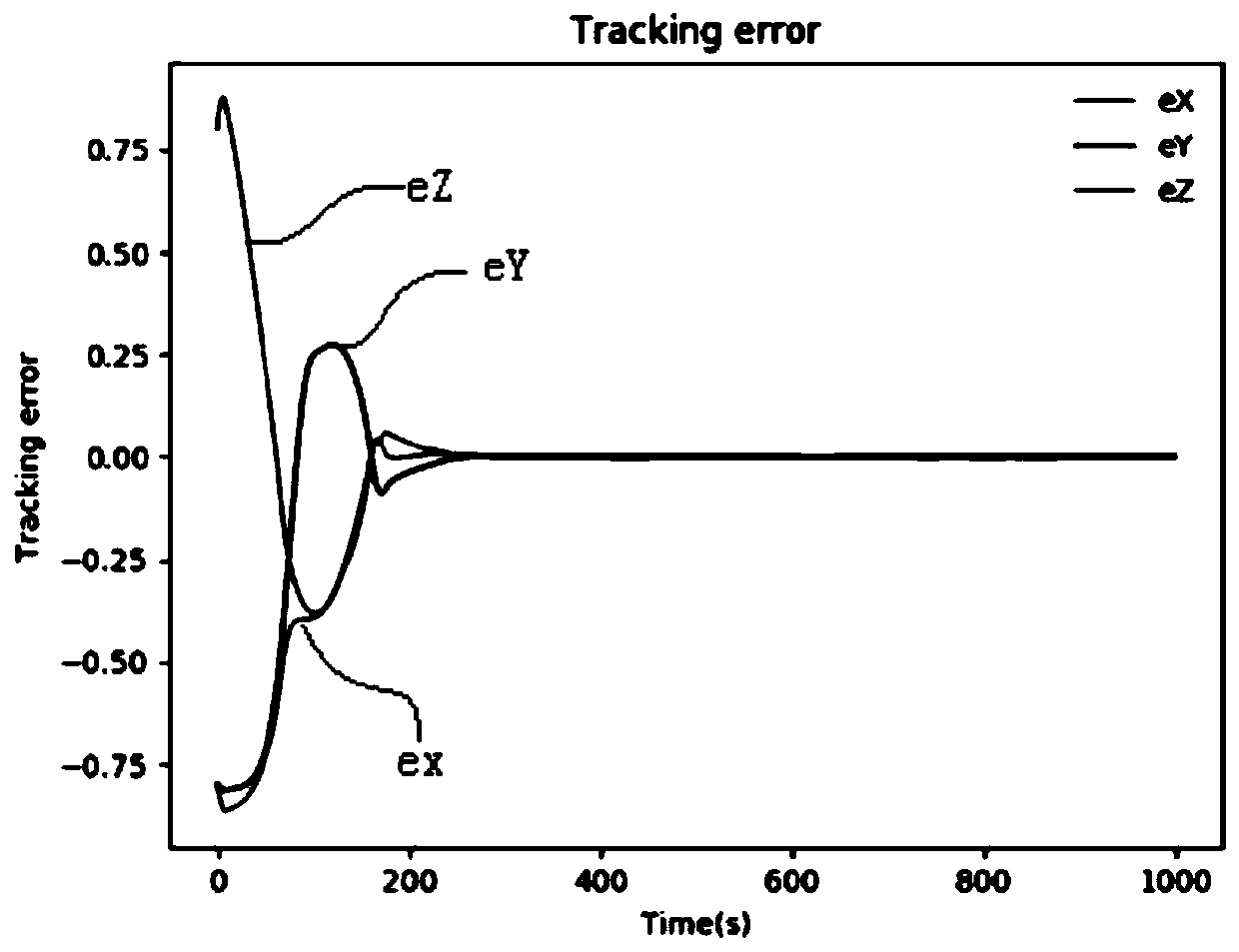
Robust control method based on reinforcement learning and Lyapunov function
PatentActiveCN110928189A
Innovation
- A robust control method based on reinforcement learning and Lyapunov functions is used to model robot dynamics through adaptive online Bayesian inference. Combined with the model predictive control framework and cross-entropy method, the control Lyapunov functions and barrier functions are constructed to achieve Efficient learning, stable work and safe exploration of robots.

Safety Standards for High-Variability Control Systems
Safety standards for high-variability control systems represent a critical framework for ensuring operational integrity when implementing robust control mechanisms in unpredictable environments. These standards address the unique challenges posed by systems operating under significant parameter variations, external disturbances, and uncertain operating conditions that can compromise both performance and safety.
The foundation of safety standards in high-variability environments rests on risk assessment methodologies that account for probabilistic failure modes and uncertainty quantification. Traditional deterministic safety approaches prove insufficient when dealing with systems where environmental conditions, system parameters, and operational demands fluctuate significantly. Modern safety frameworks incorporate stochastic analysis techniques to evaluate potential failure scenarios across the entire operational envelope.
Functional safety requirements for high-variability control systems emphasize redundancy and fault tolerance mechanisms. Safety Integrity Level (SIL) classifications must be adapted to consider the increased complexity of robust control algorithms and their interaction with variable system dynamics. The standards mandate implementation of multiple independent control channels, each capable of maintaining safe operation despite significant system variations.
Real-time monitoring and diagnostic capabilities form another cornerstone of safety standards in these environments. Continuous health monitoring systems must track not only traditional performance metrics but also the effectiveness of robust control algorithms under varying conditions. This includes monitoring adaptation rates, control effort saturation, and stability margins to ensure the system remains within safe operational boundaries.
Verification and validation procedures for high-variability control systems require extensive testing across the anticipated operational spectrum. Safety standards mandate comprehensive simulation studies, hardware-in-the-loop testing, and field validation under controlled conditions that replicate the expected variability. These procedures must demonstrate that robust control implementations maintain safety performance even at the extremes of anticipated operating conditions.
Documentation and traceability requirements ensure that all safety-critical decisions in robust control design are properly recorded and justified. This includes detailed analysis of worst-case scenarios, proof of stability under maximum anticipated variations, and clear definition of safe operating limits. Regular safety audits and compliance assessments verify ongoing adherence to established standards throughout the system lifecycle.
The foundation of safety standards in high-variability environments rests on risk assessment methodologies that account for probabilistic failure modes and uncertainty quantification. Traditional deterministic safety approaches prove insufficient when dealing with systems where environmental conditions, system parameters, and operational demands fluctuate significantly. Modern safety frameworks incorporate stochastic analysis techniques to evaluate potential failure scenarios across the entire operational envelope.
Functional safety requirements for high-variability control systems emphasize redundancy and fault tolerance mechanisms. Safety Integrity Level (SIL) classifications must be adapted to consider the increased complexity of robust control algorithms and their interaction with variable system dynamics. The standards mandate implementation of multiple independent control channels, each capable of maintaining safe operation despite significant system variations.
Real-time monitoring and diagnostic capabilities form another cornerstone of safety standards in these environments. Continuous health monitoring systems must track not only traditional performance metrics but also the effectiveness of robust control algorithms under varying conditions. This includes monitoring adaptation rates, control effort saturation, and stability margins to ensure the system remains within safe operational boundaries.
Verification and validation procedures for high-variability control systems require extensive testing across the anticipated operational spectrum. Safety standards mandate comprehensive simulation studies, hardware-in-the-loop testing, and field validation under controlled conditions that replicate the expected variability. These procedures must demonstrate that robust control implementations maintain safety performance even at the extremes of anticipated operating conditions.
Documentation and traceability requirements ensure that all safety-critical decisions in robust control design are properly recorded and justified. This includes detailed analysis of worst-case scenarios, proof of stability under maximum anticipated variations, and clear definition of safe operating limits. Regular safety audits and compliance assessments verify ongoing adherence to established standards throughout the system lifecycle.
Risk Assessment Framework for Robust Control Deployment
The deployment of robust control systems in high-variability environments necessitates a comprehensive risk assessment framework to ensure operational safety, performance reliability, and economic viability. This framework serves as a critical decision-making tool that evaluates potential hazards, quantifies uncertainties, and establishes mitigation strategies before system implementation.
The risk assessment process begins with hazard identification, focusing on environmental variabilities that could compromise control system performance. These include sensor noise amplification, actuator saturation under extreme conditions, communication delays in distributed systems, and model uncertainties arising from parameter variations. Each identified hazard requires systematic categorization based on probability of occurrence and potential impact severity.
Quantitative risk analysis forms the core of the assessment framework, employing probabilistic methods to evaluate system robustness margins. Monte Carlo simulations are utilized to assess control performance across diverse operating scenarios, while sensitivity analysis identifies critical parameters that significantly influence system stability. Failure mode and effects analysis (FMEA) provides structured evaluation of component-level risks and their propagation through the control architecture.
The framework incorporates dynamic risk evaluation capabilities to address time-varying environmental conditions. Real-time monitoring systems track key performance indicators and environmental parameters, enabling adaptive risk thresholds that reflect current operating conditions. This approach ensures that risk assessment remains relevant throughout the system lifecycle, accommodating evolving operational requirements and environmental changes.
Mitigation strategy development represents a crucial component of the framework, establishing hierarchical response protocols for different risk levels. Primary mitigation focuses on robust controller design with adequate stability margins, while secondary measures include fault-tolerant architectures and graceful degradation mechanisms. Emergency response procedures define system behavior under extreme conditions, ensuring safe operation even when primary control objectives cannot be maintained.
The framework establishes clear deployment criteria through risk tolerance thresholds and performance benchmarks. These criteria consider regulatory requirements, safety standards, and operational constraints specific to the application domain. Continuous validation processes ensure that deployed systems maintain acceptable risk levels throughout their operational lifetime, incorporating feedback mechanisms for framework refinement based on field experience.
The risk assessment process begins with hazard identification, focusing on environmental variabilities that could compromise control system performance. These include sensor noise amplification, actuator saturation under extreme conditions, communication delays in distributed systems, and model uncertainties arising from parameter variations. Each identified hazard requires systematic categorization based on probability of occurrence and potential impact severity.
Quantitative risk analysis forms the core of the assessment framework, employing probabilistic methods to evaluate system robustness margins. Monte Carlo simulations are utilized to assess control performance across diverse operating scenarios, while sensitivity analysis identifies critical parameters that significantly influence system stability. Failure mode and effects analysis (FMEA) provides structured evaluation of component-level risks and their propagation through the control architecture.
The framework incorporates dynamic risk evaluation capabilities to address time-varying environmental conditions. Real-time monitoring systems track key performance indicators and environmental parameters, enabling adaptive risk thresholds that reflect current operating conditions. This approach ensures that risk assessment remains relevant throughout the system lifecycle, accommodating evolving operational requirements and environmental changes.
Mitigation strategy development represents a crucial component of the framework, establishing hierarchical response protocols for different risk levels. Primary mitigation focuses on robust controller design with adequate stability margins, while secondary measures include fault-tolerant architectures and graceful degradation mechanisms. Emergency response procedures define system behavior under extreme conditions, ensuring safe operation even when primary control objectives cannot be maintained.
The framework establishes clear deployment criteria through risk tolerance thresholds and performance benchmarks. These criteria consider regulatory requirements, safety standards, and operational constraints specific to the application domain. Continuous validation processes ensure that deployed systems maintain acceptable risk levels throughout their operational lifetime, incorporating feedback mechanisms for framework refinement based on field experience.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!