Improving Soft Robotics Lifting Capacity in Variable Conditions
APR 14, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Soft Robotics Lifting Capacity Background and Objectives
Soft robotics represents a paradigm shift from traditional rigid robotic systems, drawing inspiration from biological organisms that achieve remarkable functionality through compliant materials and structures. This field emerged in the early 2000s as researchers recognized the limitations of conventional robotics in applications requiring safe human interaction, adaptability to unstructured environments, and gentle manipulation of delicate objects. The fundamental principle underlying soft robotics lies in the use of elastomeric materials, flexible actuators, and bio-inspired designs that enable robots to deform, bend, and adapt their shape in response to external forces and environmental constraints.
The evolution of soft robotics has been driven by advances in materials science, particularly the development of silicone elastomers, shape memory alloys, and electroactive polymers. These materials enable the creation of actuators that can generate significant forces while maintaining compliance and safety. However, the inherent trade-off between compliance and load-bearing capacity has emerged as one of the most significant challenges in the field, limiting the practical applications of soft robotic systems in industrial and service environments.
Current soft robotic systems typically exhibit lifting capacities ranging from a few grams to several kilograms, significantly lower than their rigid counterparts. This limitation stems from the fundamental properties of soft materials, which prioritize flexibility and compliance over structural rigidity and force transmission efficiency. The challenge becomes more pronounced when these systems must operate in variable environmental conditions, where factors such as temperature fluctuations, humidity changes, surface variations, and dynamic loading scenarios can dramatically affect performance.
The primary objective of improving soft robotics lifting capacity in variable conditions encompasses multiple technical goals. First, developing advanced actuator designs that can generate higher forces while maintaining the inherent compliance and safety characteristics of soft systems. This involves optimizing pneumatic, hydraulic, and cable-driven actuation mechanisms to achieve better force-to-weight ratios and improved energy efficiency.
Second, creating adaptive control strategies that can dynamically adjust system parameters based on real-time environmental feedback and load conditions. This includes developing sensing technologies that can monitor material properties, environmental conditions, and load distributions to enable intelligent adaptation of lifting strategies.
Third, advancing materials engineering to develop next-generation soft materials that exhibit enhanced mechanical properties without compromising flexibility. This involves exploring hybrid material systems, reinforcement strategies, and novel polymer compositions that can provide improved load-bearing capabilities while maintaining the essential characteristics of soft robotics.
The ultimate goal is to bridge the performance gap between soft and rigid robotic systems, enabling soft robots to handle substantial payloads across diverse operating conditions while preserving their unique advantages in safety, adaptability, and human-robot interaction.
The evolution of soft robotics has been driven by advances in materials science, particularly the development of silicone elastomers, shape memory alloys, and electroactive polymers. These materials enable the creation of actuators that can generate significant forces while maintaining compliance and safety. However, the inherent trade-off between compliance and load-bearing capacity has emerged as one of the most significant challenges in the field, limiting the practical applications of soft robotic systems in industrial and service environments.
Current soft robotic systems typically exhibit lifting capacities ranging from a few grams to several kilograms, significantly lower than their rigid counterparts. This limitation stems from the fundamental properties of soft materials, which prioritize flexibility and compliance over structural rigidity and force transmission efficiency. The challenge becomes more pronounced when these systems must operate in variable environmental conditions, where factors such as temperature fluctuations, humidity changes, surface variations, and dynamic loading scenarios can dramatically affect performance.
The primary objective of improving soft robotics lifting capacity in variable conditions encompasses multiple technical goals. First, developing advanced actuator designs that can generate higher forces while maintaining the inherent compliance and safety characteristics of soft systems. This involves optimizing pneumatic, hydraulic, and cable-driven actuation mechanisms to achieve better force-to-weight ratios and improved energy efficiency.
Second, creating adaptive control strategies that can dynamically adjust system parameters based on real-time environmental feedback and load conditions. This includes developing sensing technologies that can monitor material properties, environmental conditions, and load distributions to enable intelligent adaptation of lifting strategies.
Third, advancing materials engineering to develop next-generation soft materials that exhibit enhanced mechanical properties without compromising flexibility. This involves exploring hybrid material systems, reinforcement strategies, and novel polymer compositions that can provide improved load-bearing capabilities while maintaining the essential characteristics of soft robotics.
The ultimate goal is to bridge the performance gap between soft and rigid robotic systems, enabling soft robots to handle substantial payloads across diverse operating conditions while preserving their unique advantages in safety, adaptability, and human-robot interaction.
Market Demand for Enhanced Soft Robot Load Handling
The global soft robotics market is experiencing unprecedented growth driven by increasing demand for safer human-robot collaboration across multiple industries. Manufacturing sectors are particularly seeking robotic solutions that can handle delicate materials without damage while maintaining operational efficiency. Traditional rigid robots often prove inadequate for tasks requiring gentle manipulation of fragile components, creating substantial market opportunities for enhanced soft robotic systems.
Healthcare applications represent another significant demand driver, where soft robots must safely interact with patients during rehabilitation, surgery assistance, and elderly care. The aging global population intensifies the need for assistive technologies capable of providing physical support while adapting to varying human conditions and environments. Current soft robotic limitations in load capacity severely restrict their deployment in these critical applications.
Logistics and warehousing operations face mounting pressure to automate material handling processes while accommodating diverse package types, weights, and fragility levels. E-commerce growth has amplified demand for robotic systems capable of handling variable loads efficiently without product damage. Existing soft robots struggle to meet the lifting requirements necessary for widespread adoption in these high-volume environments.
Agricultural automation presents emerging opportunities where soft robots must handle crops and livestock with appropriate force control across changing environmental conditions. Weather variations, seasonal changes, and diverse agricultural products create complex operational requirements that current soft robotic systems cannot adequately address due to insufficient load capacity and adaptability.
The construction industry increasingly recognizes potential applications for soft robotics in material handling and human assistance tasks. However, the demanding physical requirements and variable site conditions exceed current soft robot capabilities, limiting market penetration despite strong interest from industry stakeholders.
Research institutions and academic organizations are driving demand for advanced soft robotic platforms capable of supporting diverse experimental applications. These users require systems with enhanced lifting capacity to explore broader research possibilities and validate theoretical concepts in practical scenarios.
Market surveys indicate that improved load handling capabilities would unlock significant commercial potential across these sectors, with many organizations expressing willingness to invest in soft robotic solutions that can reliably operate under variable conditions while maintaining their inherent safety advantages over traditional rigid systems.
Healthcare applications represent another significant demand driver, where soft robots must safely interact with patients during rehabilitation, surgery assistance, and elderly care. The aging global population intensifies the need for assistive technologies capable of providing physical support while adapting to varying human conditions and environments. Current soft robotic limitations in load capacity severely restrict their deployment in these critical applications.
Logistics and warehousing operations face mounting pressure to automate material handling processes while accommodating diverse package types, weights, and fragility levels. E-commerce growth has amplified demand for robotic systems capable of handling variable loads efficiently without product damage. Existing soft robots struggle to meet the lifting requirements necessary for widespread adoption in these high-volume environments.
Agricultural automation presents emerging opportunities where soft robots must handle crops and livestock with appropriate force control across changing environmental conditions. Weather variations, seasonal changes, and diverse agricultural products create complex operational requirements that current soft robotic systems cannot adequately address due to insufficient load capacity and adaptability.
The construction industry increasingly recognizes potential applications for soft robotics in material handling and human assistance tasks. However, the demanding physical requirements and variable site conditions exceed current soft robot capabilities, limiting market penetration despite strong interest from industry stakeholders.
Research institutions and academic organizations are driving demand for advanced soft robotic platforms capable of supporting diverse experimental applications. These users require systems with enhanced lifting capacity to explore broader research possibilities and validate theoretical concepts in practical scenarios.
Market surveys indicate that improved load handling capabilities would unlock significant commercial potential across these sectors, with many organizations expressing willingness to invest in soft robotic solutions that can reliably operate under variable conditions while maintaining their inherent safety advantages over traditional rigid systems.
Current Limitations of Soft Actuators in Variable Environments
Soft actuators face significant material property constraints that fundamentally limit their performance in variable environmental conditions. Traditional elastomeric materials like silicone rubber exhibit substantial stiffness variations with temperature changes, potentially losing up to 40% of their modulus at elevated temperatures. This temperature sensitivity directly impacts lifting capacity predictability, as actuators may generate insufficient force in hot environments or become overly rigid in cold conditions.
Pressure regulation represents another critical limitation affecting soft actuator reliability. Most pneumatic soft actuators operate within narrow pressure ranges, typically 20-100 kPa, to prevent material failure or geometric instability. When environmental conditions change, maintaining optimal pressure becomes challenging due to gas law effects and material property variations. Higher altitudes reduce atmospheric pressure baselines, while temperature fluctuations cause internal pressure variations that compromise actuator performance consistency.
Structural deformation under load presents persistent challenges for soft robotics applications requiring reliable lifting capacity. Unlike rigid actuators, soft systems experience significant shape changes during operation, leading to reduced mechanical advantage as loads increase. This buckling tendency becomes more pronounced in variable conditions where external forces, vibrations, or surface irregularities can trigger unpredictable deformation patterns that drastically reduce lifting effectiveness.
Environmental contamination poses substantial operational risks for soft actuators deployed in real-world conditions. Dust, moisture, and chemical exposure can degrade elastomeric surfaces, alter friction properties, and compromise sealing integrity. These contamination effects accumulate over time, gradually reducing actuator performance and creating unpredictable failure modes that are difficult to compensate for through control algorithms alone.
Control system limitations further constrain soft actuator performance in dynamic environments. Traditional feedback control approaches struggle with the inherent nonlinearities and hysteresis effects characteristic of soft materials. Sensor integration remains challenging due to the flexible nature of soft actuators, limiting real-time monitoring capabilities essential for adaptive performance in variable conditions.
Power efficiency represents an ongoing constraint, particularly for pneumatic systems requiring continuous pressurization. Energy consumption increases significantly when operating against variable loads or in challenging environmental conditions, limiting deployment duration and practical applications. Additionally, the response time of soft actuators typically exceeds that of rigid systems, creating difficulties in rapidly adapting to changing environmental demands or load requirements.
Pressure regulation represents another critical limitation affecting soft actuator reliability. Most pneumatic soft actuators operate within narrow pressure ranges, typically 20-100 kPa, to prevent material failure or geometric instability. When environmental conditions change, maintaining optimal pressure becomes challenging due to gas law effects and material property variations. Higher altitudes reduce atmospheric pressure baselines, while temperature fluctuations cause internal pressure variations that compromise actuator performance consistency.
Structural deformation under load presents persistent challenges for soft robotics applications requiring reliable lifting capacity. Unlike rigid actuators, soft systems experience significant shape changes during operation, leading to reduced mechanical advantage as loads increase. This buckling tendency becomes more pronounced in variable conditions where external forces, vibrations, or surface irregularities can trigger unpredictable deformation patterns that drastically reduce lifting effectiveness.
Environmental contamination poses substantial operational risks for soft actuators deployed in real-world conditions. Dust, moisture, and chemical exposure can degrade elastomeric surfaces, alter friction properties, and compromise sealing integrity. These contamination effects accumulate over time, gradually reducing actuator performance and creating unpredictable failure modes that are difficult to compensate for through control algorithms alone.
Control system limitations further constrain soft actuator performance in dynamic environments. Traditional feedback control approaches struggle with the inherent nonlinearities and hysteresis effects characteristic of soft materials. Sensor integration remains challenging due to the flexible nature of soft actuators, limiting real-time monitoring capabilities essential for adaptive performance in variable conditions.
Power efficiency represents an ongoing constraint, particularly for pneumatic systems requiring continuous pressurization. Energy consumption increases significantly when operating against variable loads or in challenging environmental conditions, limiting deployment duration and practical applications. Additionally, the response time of soft actuators typically exceeds that of rigid systems, creating difficulties in rapidly adapting to changing environmental demands or load requirements.
Existing Solutions for Soft Robot Strength Enhancement
01 Pneumatic actuation systems for enhanced lifting force
Soft robotic grippers and actuators utilize pneumatic pressure control to generate lifting force. By optimizing chamber design, pressure distribution, and inflation patterns, these systems can achieve significant load-bearing capacity while maintaining flexibility. The pneumatic approach allows for variable force output through pressure modulation, enabling adaptive gripping and lifting of objects with different weights and geometries.- Pneumatic actuation systems for enhanced lifting force: Soft robotic grippers and actuators utilize pneumatic pressure control to generate lifting and gripping forces. By optimizing the internal chamber design and pressure distribution, these systems can achieve significant load-bearing capacity while maintaining flexibility. The pneumatic actuation allows for variable force output and adaptive grasping of objects with different weights and geometries.
- Material selection and structural reinforcement: The lifting capacity of soft robots is enhanced through the use of high-strength elastomeric materials and fiber reinforcement techniques. Strategic placement of inextensible layers and composite materials increases the structural integrity without sacrificing flexibility. These material innovations enable soft robots to handle heavier payloads while maintaining their compliant nature and safe interaction capabilities.
- Multi-chamber and segmented actuator designs: Advanced soft robotic systems employ multi-chamber configurations and segmented architectures to distribute loads more effectively and increase overall lifting capacity. These designs allow for independent control of different sections, enabling optimized force distribution and improved stability during lifting operations. The segmented approach also provides redundancy and enhanced load management capabilities.
- Hybrid rigid-soft structural integration: Combining rigid structural elements with soft actuating components creates hybrid systems that leverage the advantages of both approaches. The rigid components provide load-bearing support and structural stability, while soft elements maintain flexibility and adaptability. This integration significantly improves lifting capacity while preserving the safety and compliance characteristics essential for soft robotics applications.
- Control algorithms and force optimization: Sophisticated control systems and algorithms optimize the lifting performance of soft robots by dynamically adjusting actuation parameters based on load conditions. These systems incorporate sensors and feedback mechanisms to monitor force distribution and adjust pressure or actuation patterns in real-time. Advanced control strategies enable maximum lifting efficiency while preventing overload and ensuring stable operation across varying payload conditions.
02 Material selection and composite structures for strength enhancement
The lifting capacity of soft robots is significantly influenced by material properties and structural design. Advanced elastomers, fiber-reinforced composites, and multi-layer constructions provide improved tensile strength and load distribution. Strategic placement of reinforcing elements within flexible matrices enables soft actuators to handle heavier payloads while preserving their compliant nature and adaptability to irregular surfaces.Expand Specific Solutions03 Geometric optimization and structural configuration
The geometric design of soft robotic components plays a crucial role in maximizing lifting capacity. Specific configurations including bellows patterns, origami-inspired folds, and segmented architectures distribute mechanical stress more effectively. These structural optimizations allow for greater force transmission and improved load-bearing characteristics without compromising the inherent flexibility of soft robotic systems.Expand Specific Solutions04 Hybrid rigid-soft integration for load support
Combining rigid structural elements with soft actuating components creates hybrid systems that balance flexibility with load-bearing capability. Strategic integration of rigid frames, support structures, or constraint layers enhances the overall lifting capacity while maintaining the adaptive advantages of soft robotics. This approach enables handling of heavier objects while preserving safe human-robot interaction characteristics.Expand Specific Solutions05 Multi-actuator coordination and force amplification
Coordinated operation of multiple soft actuators working in parallel or series configurations significantly increases overall lifting capacity. Force amplification mechanisms, synchronized control strategies, and distributed actuation systems enable soft robots to handle loads beyond the capability of individual actuators. This approach also provides redundancy and improved stability during lifting operations.Expand Specific Solutions
Key Players in Soft Robotics and Actuator Industry
The soft robotics lifting capacity enhancement field represents an emerging technology sector in its early growth phase, characterized by significant research momentum but limited commercial maturity. The market remains relatively nascent with substantial expansion potential as applications span manufacturing, healthcare, and logistics industries. Technology maturity varies considerably across the competitive landscape, with leading research institutions like MIT, Harvard College, and Cornell University driving fundamental breakthroughs in materials science and control systems. Industrial players including Boston Dynamics and Toyota Motor Corp. are advancing practical implementations, while specialized companies like Oxipital AI focus on AI-enabled robotic guidance systems. Chinese institutions such as Harbin Institute of Technology, Beijing University of Chemical Technology, and South China University of Technology contribute significant research capabilities, alongside international academic powerhouses like École Polytechnique Fédérale de Lausanne and Korea Advanced Institute of Science & Technology, creating a globally distributed innovation ecosystem with varying levels of technological readiness.
President & Fellows of Harvard College
Technical Solution: Harvard's Wyss Institute has developed breakthrough soft robotic technologies including pneumatic networks (PneuNets) and fiber-reinforced actuators that can generate significant lifting forces while maintaining compliance. Their soft robotic systems incorporate adaptive materials and bio-inspired designs that automatically adjust mechanical properties based on load requirements and environmental conditions. The research team has created soft grippers with variable stiffness capabilities using jamming principles and thermally-activated materials, enabling these systems to handle diverse objects with varying weights and shapes. Their approach includes development of distributed sensing networks within soft robotic structures that provide continuous feedback for optimizing lifting performance and adapting to changing operational parameters in real-time scenarios.
Strengths: Pioneering soft robotics research with innovative bio-inspired solutions and strong interdisciplinary collaboration. Weaknesses: Academic focus with limited industrial partnerships, challenges in scaling laboratory prototypes to commercial applications.
Massachusetts Institute of Technology
Technical Solution: MIT's Computer Science and Artificial Intelligence Laboratory has pioneered soft robotic actuators using pneumatic artificial muscles and variable stiffness materials that can adapt their lifting capacity through morphological changes. Their research focuses on bio-inspired soft grippers and manipulators that utilize jamming mechanisms and smart materials to modulate stiffness and strength based on task requirements. The institute has developed novel control strategies for soft robots that incorporate environmental sensing and adaptive feedback loops, enabling these systems to maintain lifting performance across varying load conditions and surface interactions. Their work includes development of soft robotic systems with embedded sensors that provide real-time feedback for optimizing grip force and lifting trajectories in unpredictable environments.
Strengths: Leading research institution with cutting-edge soft robotics innovations and strong theoretical foundations. Weaknesses: Research-focused with limited commercial implementation, longer development cycles for practical applications.
Core Innovations in Variable Condition Adaptation
Software robot actuator with rigidity independently controllable
PatentInactiveCN109048856A
Innovation
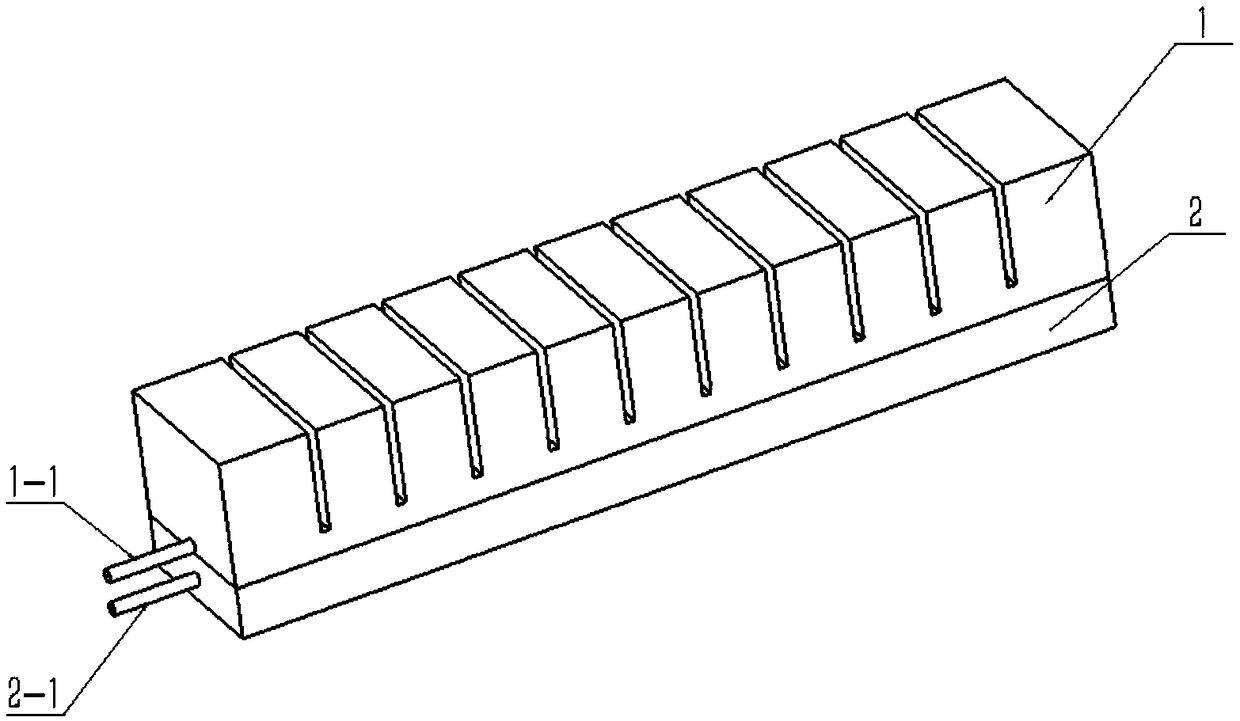
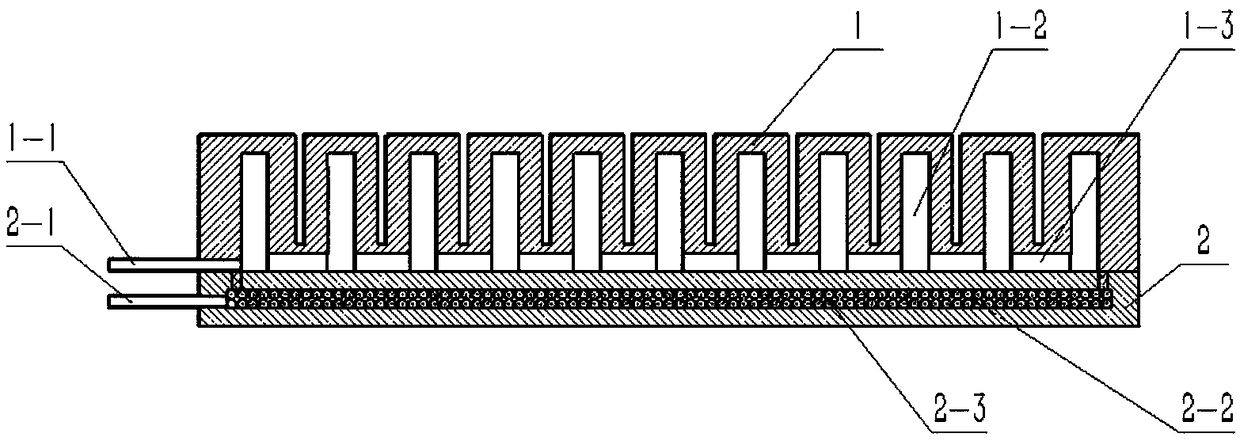
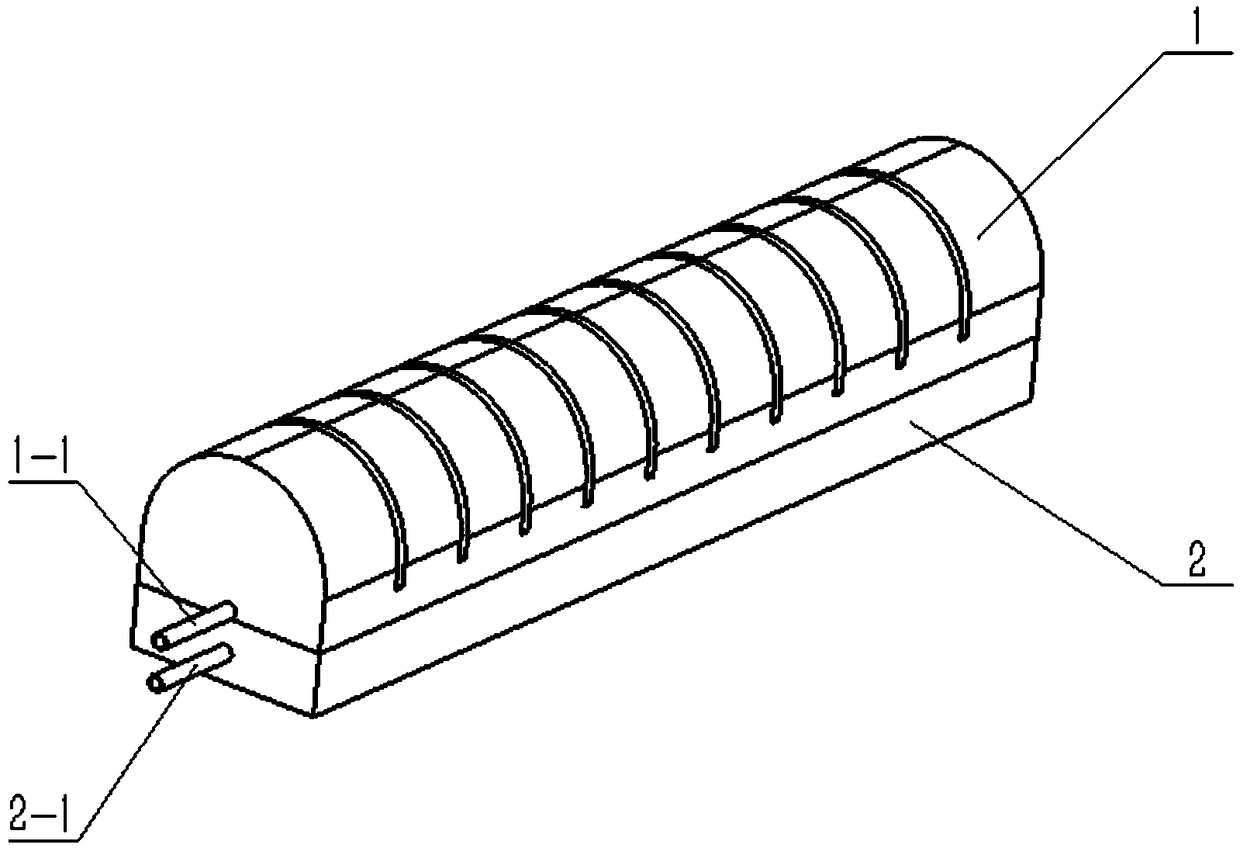
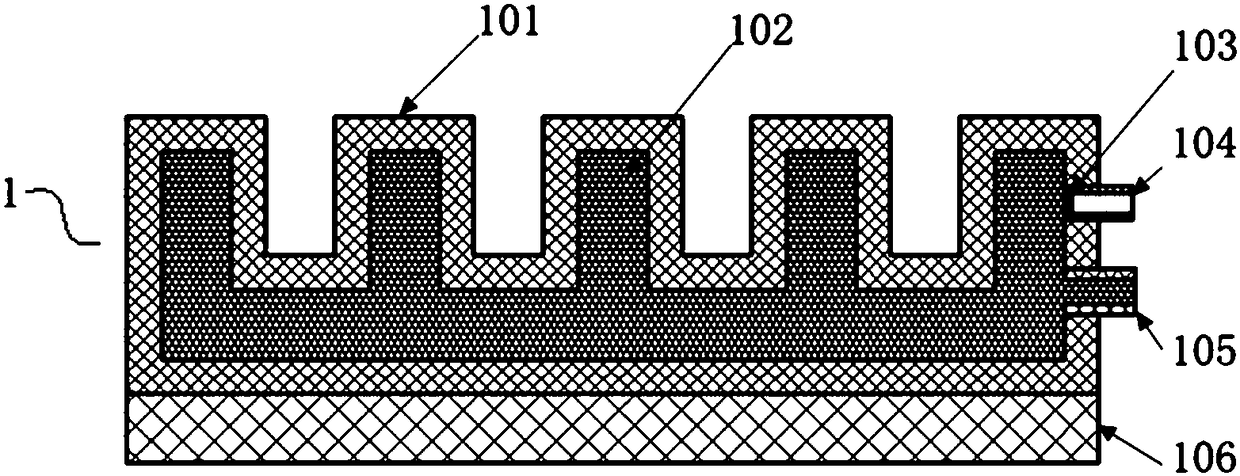
- A soft robot actuator including a gas actuator part and a stiffness adjustment part is designed. By setting a stiffness adjustment chamber at the bottom of the gas actuator part and filling it with a granular media gauze bag, the stiffness of the actuator is adjusted using air pressure to ensure that the Reduce or increase its overall stiffness as needed.

Variable stiffness soft robot system
PatentInactiveCN108582033A
Innovation
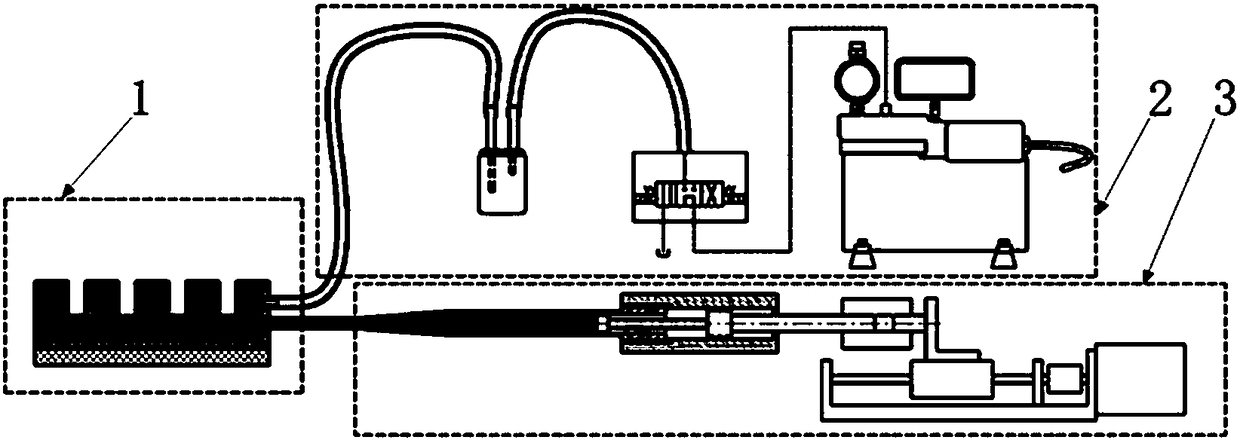
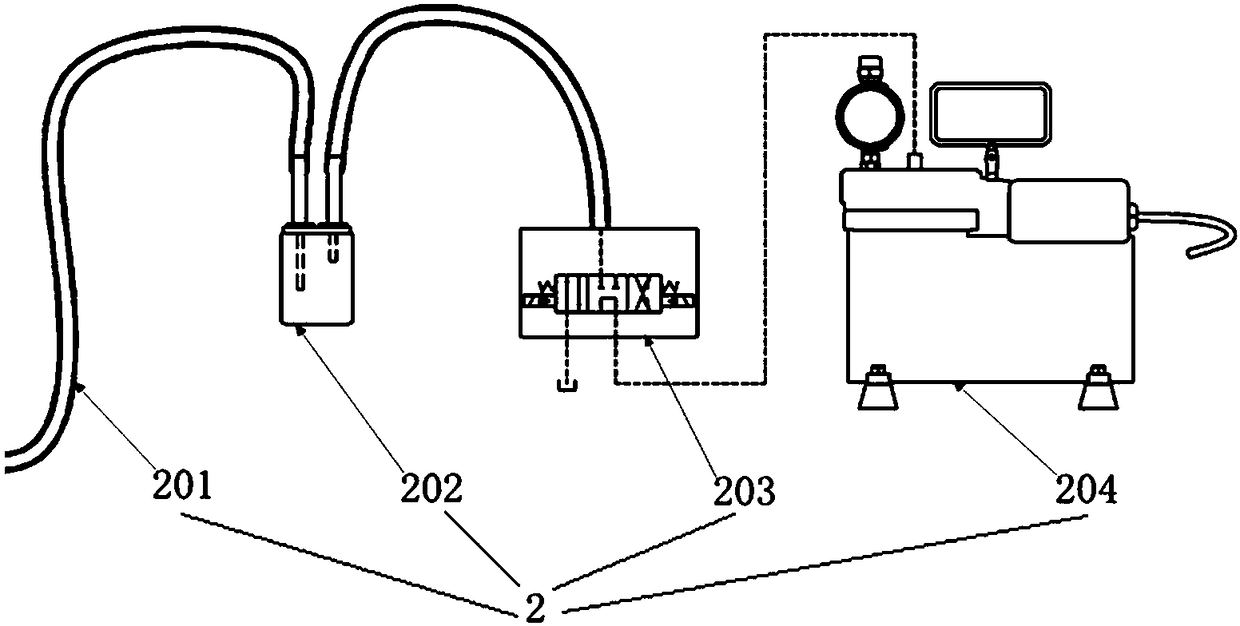
- Using a cavity surrounded by elastically deformable cavity walls, combined with a vacuum pumping device and a particle transport device, the stiffness of the soft robot is adjusted by vacuuming and transporting deformation-inducing media (such as microsphere particles) to achieve active deformation and static load-bearing.

Safety Standards for Industrial Soft Robotics
The development of comprehensive safety standards for industrial soft robotics represents a critical regulatory framework essential for widespread adoption of these technologies in manufacturing environments. Current safety protocols primarily derive from traditional rigid robotics standards, which inadequately address the unique characteristics and failure modes of soft robotic systems. The inherent compliance and deformability of soft robots, while offering safety advantages through reduced impact forces, introduce novel risk scenarios that require specialized evaluation criteria.
Existing international standards such as ISO 10218 and ISO/TS 15066 provide foundational safety principles for collaborative robotics but lack specific provisions for soft robotic actuators, sensors, and control systems. The pneumatic and hydraulic systems commonly used in soft robotics present distinct hazards including pressure vessel failures, fluid leaks, and unpredictable deformation patterns under varying load conditions. These systems require specialized pressure relief mechanisms, leak detection protocols, and fail-safe deflation procedures that differ significantly from conventional robotic safety measures.
Material safety considerations form another crucial aspect of industrial soft robotics standards. The elastomeric materials used in soft actuators may degrade over time due to fatigue, chemical exposure, or temperature variations, potentially leading to catastrophic failures during lifting operations. Standards must establish material testing protocols, lifecycle assessment requirements, and replacement schedules to ensure consistent performance and safety margins throughout the operational lifespan.
Human-robot interaction safety protocols require substantial revision for soft robotic systems operating in variable conditions. While soft robots generally pose lower collision risks due to their compliant nature, their unpredictable deformation under different loads can create entanglement hazards or unexpected contact scenarios. Safety standards must define minimum clearance requirements, emergency stop procedures, and operator training protocols specific to soft robotic behavior patterns.
Certification processes for industrial soft robotics currently lack standardized testing methodologies for evaluating performance under variable environmental conditions. Future safety standards must incorporate dynamic testing protocols that simulate real-world operational scenarios, including temperature fluctuations, humidity changes, and varying payload distributions. These standards should establish performance benchmarks, failure detection thresholds, and maintenance requirements to ensure reliable operation across diverse industrial applications while maintaining operator safety and system integrity.
Existing international standards such as ISO 10218 and ISO/TS 15066 provide foundational safety principles for collaborative robotics but lack specific provisions for soft robotic actuators, sensors, and control systems. The pneumatic and hydraulic systems commonly used in soft robotics present distinct hazards including pressure vessel failures, fluid leaks, and unpredictable deformation patterns under varying load conditions. These systems require specialized pressure relief mechanisms, leak detection protocols, and fail-safe deflation procedures that differ significantly from conventional robotic safety measures.
Material safety considerations form another crucial aspect of industrial soft robotics standards. The elastomeric materials used in soft actuators may degrade over time due to fatigue, chemical exposure, or temperature variations, potentially leading to catastrophic failures during lifting operations. Standards must establish material testing protocols, lifecycle assessment requirements, and replacement schedules to ensure consistent performance and safety margins throughout the operational lifespan.
Human-robot interaction safety protocols require substantial revision for soft robotic systems operating in variable conditions. While soft robots generally pose lower collision risks due to their compliant nature, their unpredictable deformation under different loads can create entanglement hazards or unexpected contact scenarios. Safety standards must define minimum clearance requirements, emergency stop procedures, and operator training protocols specific to soft robotic behavior patterns.
Certification processes for industrial soft robotics currently lack standardized testing methodologies for evaluating performance under variable environmental conditions. Future safety standards must incorporate dynamic testing protocols that simulate real-world operational scenarios, including temperature fluctuations, humidity changes, and varying payload distributions. These standards should establish performance benchmarks, failure detection thresholds, and maintenance requirements to ensure reliable operation across diverse industrial applications while maintaining operator safety and system integrity.
Bio-Inspired Approaches to Soft Robot Strength
Nature has evolved remarkable solutions for generating extraordinary strength and lifting capacity across diverse environmental conditions, providing invaluable blueprints for enhancing soft robotics performance. Biological systems demonstrate sophisticated mechanisms that seamlessly adapt force generation capabilities while maintaining structural flexibility, offering critical insights for addressing variable operational demands in soft robotic applications.
Muscular architectures in biological organisms present compelling models for soft robot strength enhancement. The hierarchical organization of muscle fibers, from molecular motor proteins to macroscopic muscle groups, enables dynamic force modulation through coordinated activation patterns. Octopus arms exemplify this principle, utilizing hydrostatic pressure combined with muscular contractions to achieve remarkable lifting capacities while maintaining omnidirectional flexibility. Similarly, elephant trunks demonstrate how distributed actuation systems can generate substantial forces through coordinated segment activation, providing inspiration for multi-actuator soft robotic designs.
Plant-based mechanisms offer alternative approaches to strength generation through osmotic pressure and turgor-driven systems. The rapid movement of Venus flytraps and the powerful grip of climbing vines demonstrate how biological systems harness fluid dynamics and pressure differentials to achieve impressive force outputs. These mechanisms suggest novel actuation strategies for soft robots operating in environments where traditional pneumatic or hydraulic systems may face limitations.
Biomimetic material strategies derived from natural composites present opportunities for enhancing structural integrity without sacrificing flexibility. The hierarchical structure of spider silk, combining crystalline and amorphous regions, provides exceptional strength-to-weight ratios while maintaining elasticity. Similarly, the layered architecture of plant cell walls and the fibrous composition of tendons offer design principles for developing soft robotic materials that can withstand higher loads while adapting to environmental variations.
Adaptive control mechanisms observed in biological systems provide frameworks for intelligent force modulation in variable conditions. Neural control strategies in biological organisms demonstrate real-time adjustment of muscle activation patterns based on load sensing and environmental feedback. These biological control paradigms suggest implementation of adaptive algorithms that can optimize actuator coordination and force distribution in response to changing lifting requirements and environmental constraints, ultimately enhancing overall system performance and reliability.
Muscular architectures in biological organisms present compelling models for soft robot strength enhancement. The hierarchical organization of muscle fibers, from molecular motor proteins to macroscopic muscle groups, enables dynamic force modulation through coordinated activation patterns. Octopus arms exemplify this principle, utilizing hydrostatic pressure combined with muscular contractions to achieve remarkable lifting capacities while maintaining omnidirectional flexibility. Similarly, elephant trunks demonstrate how distributed actuation systems can generate substantial forces through coordinated segment activation, providing inspiration for multi-actuator soft robotic designs.
Plant-based mechanisms offer alternative approaches to strength generation through osmotic pressure and turgor-driven systems. The rapid movement of Venus flytraps and the powerful grip of climbing vines demonstrate how biological systems harness fluid dynamics and pressure differentials to achieve impressive force outputs. These mechanisms suggest novel actuation strategies for soft robots operating in environments where traditional pneumatic or hydraulic systems may face limitations.
Biomimetic material strategies derived from natural composites present opportunities for enhancing structural integrity without sacrificing flexibility. The hierarchical structure of spider silk, combining crystalline and amorphous regions, provides exceptional strength-to-weight ratios while maintaining elasticity. Similarly, the layered architecture of plant cell walls and the fibrous composition of tendons offer design principles for developing soft robotic materials that can withstand higher loads while adapting to environmental variations.
Adaptive control mechanisms observed in biological systems provide frameworks for intelligent force modulation in variable conditions. Neural control strategies in biological organisms demonstrate real-time adjustment of muscle activation patterns based on load sensing and environmental feedback. These biological control paradigms suggest implementation of adaptive algorithms that can optimize actuator coordination and force distribution in response to changing lifting requirements and environmental constraints, ultimately enhancing overall system performance and reliability.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!