Optimizing Soft Robotics for Enhanced Load-Bearing Capability
APR 14, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Soft Robotics Load-Bearing Background and Objectives
Soft robotics represents a paradigm shift from traditional rigid robotic systems, drawing inspiration from biological organisms that achieve remarkable functionality through compliant materials and structures. This field emerged in the early 2000s as researchers recognized the limitations of conventional robotics in applications requiring safe human interaction, adaptability to unstructured environments, and delicate manipulation tasks. The fundamental principle underlying soft robotics lies in the use of elastomeric materials, flexible actuators, and bio-inspired designs that enable robots to deform, bend, and adapt their shape dynamically.
The evolution of soft robotics has been driven by advances in materials science, particularly the development of silicone elastomers, hydrogels, and smart materials that can respond to various stimuli. Early soft robotic systems demonstrated impressive capabilities in grasping irregular objects and navigating confined spaces, but they were primarily limited to low-force applications due to the inherent trade-off between compliance and structural integrity.
Load-bearing capability has emerged as one of the most critical challenges limiting the widespread adoption of soft robotic systems in industrial and practical applications. Traditional soft robots excel in delicate manipulation tasks but struggle to support significant weights or generate substantial forces required for heavy-duty operations. This limitation stems from the fundamental material properties of soft elastomers, which prioritize flexibility over structural strength.
The primary objective of optimizing soft robotics for enhanced load-bearing capability is to bridge the gap between the inherent compliance of soft materials and the structural requirements for supporting substantial loads. This involves developing innovative material compositions, architectural designs, and actuation mechanisms that can dynamically adjust stiffness while maintaining the beneficial characteristics of soft robotics.
Key technical objectives include achieving variable stiffness control that allows robots to transition between compliant and rigid states as needed, developing reinforcement strategies that enhance load capacity without compromising flexibility, and creating hybrid systems that integrate soft and rigid components optimally. Additionally, the goal encompasses improving force transmission efficiency through advanced actuator designs and implementing intelligent control algorithms that can predict and adapt to varying load conditions.
The ultimate vision is to create soft robotic systems capable of handling industrial-grade loads while retaining their unique advantages in safety, adaptability, and bio-compatibility, thereby expanding their application domains to include construction, manufacturing, and heavy-duty service robotics.
The evolution of soft robotics has been driven by advances in materials science, particularly the development of silicone elastomers, hydrogels, and smart materials that can respond to various stimuli. Early soft robotic systems demonstrated impressive capabilities in grasping irregular objects and navigating confined spaces, but they were primarily limited to low-force applications due to the inherent trade-off between compliance and structural integrity.
Load-bearing capability has emerged as one of the most critical challenges limiting the widespread adoption of soft robotic systems in industrial and practical applications. Traditional soft robots excel in delicate manipulation tasks but struggle to support significant weights or generate substantial forces required for heavy-duty operations. This limitation stems from the fundamental material properties of soft elastomers, which prioritize flexibility over structural strength.
The primary objective of optimizing soft robotics for enhanced load-bearing capability is to bridge the gap between the inherent compliance of soft materials and the structural requirements for supporting substantial loads. This involves developing innovative material compositions, architectural designs, and actuation mechanisms that can dynamically adjust stiffness while maintaining the beneficial characteristics of soft robotics.
Key technical objectives include achieving variable stiffness control that allows robots to transition between compliant and rigid states as needed, developing reinforcement strategies that enhance load capacity without compromising flexibility, and creating hybrid systems that integrate soft and rigid components optimally. Additionally, the goal encompasses improving force transmission efficiency through advanced actuator designs and implementing intelligent control algorithms that can predict and adapt to varying load conditions.
The ultimate vision is to create soft robotic systems capable of handling industrial-grade loads while retaining their unique advantages in safety, adaptability, and bio-compatibility, thereby expanding their application domains to include construction, manufacturing, and heavy-duty service robotics.
Market Demand for High-Strength Soft Robotic Systems
The global robotics market is experiencing unprecedented growth, with soft robotics emerging as a transformative segment driven by increasing demand for safer human-robot interaction and adaptable automation solutions. Traditional rigid robots face significant limitations in environments requiring delicate manipulation, variable terrain navigation, and close proximity to humans, creating substantial market opportunities for soft robotic alternatives.
Healthcare applications represent the largest growth driver for high-strength soft robotic systems. Surgical robots require precise manipulation capabilities while maintaining gentle tissue interaction, demanding enhanced load-bearing capacity without compromising safety. Rehabilitation devices and prosthetics markets are expanding rapidly as aging populations worldwide seek assistive technologies that combine strength with natural movement patterns. The growing emphasis on minimally invasive procedures further amplifies demand for soft robots capable of supporting substantial loads while navigating complex anatomical structures.
Manufacturing industries are increasingly adopting soft robotic solutions for handling fragile components, food processing, and collaborative assembly operations. The automotive sector particularly values soft robots that can manipulate heavy parts while preventing surface damage. Electronics manufacturing requires systems capable of precise positioning under load while maintaining gentle contact forces. These applications drive demand for soft robots that exceed current strength limitations while preserving inherent compliance advantages.
Logistics and warehousing sectors present emerging opportunities for load-bearing soft robotics. E-commerce growth necessitates automated systems capable of handling diverse package weights and shapes without damage. Current soft robotic grippers struggle with heavier items, creating market demand for enhanced load-bearing capabilities. Agricultural automation similarly requires soft robots that can harvest and transport substantial loads while adapting to irregular crop geometries.
Defense and aerospace applications increasingly seek soft robotic solutions for equipment handling, maintenance operations, and human augmentation systems. These sectors demand high strength-to-weight ratios and reliability under extreme conditions, pushing requirements for advanced load-bearing soft robotic technologies.
The convergence of artificial intelligence, advanced materials science, and manufacturing capabilities is expanding addressable markets for soft robotics. Industries previously reliant on rigid automation are recognizing soft robotics potential, provided strength limitations can be overcome while maintaining compliance characteristics that define the technology's core value proposition.
Healthcare applications represent the largest growth driver for high-strength soft robotic systems. Surgical robots require precise manipulation capabilities while maintaining gentle tissue interaction, demanding enhanced load-bearing capacity without compromising safety. Rehabilitation devices and prosthetics markets are expanding rapidly as aging populations worldwide seek assistive technologies that combine strength with natural movement patterns. The growing emphasis on minimally invasive procedures further amplifies demand for soft robots capable of supporting substantial loads while navigating complex anatomical structures.
Manufacturing industries are increasingly adopting soft robotic solutions for handling fragile components, food processing, and collaborative assembly operations. The automotive sector particularly values soft robots that can manipulate heavy parts while preventing surface damage. Electronics manufacturing requires systems capable of precise positioning under load while maintaining gentle contact forces. These applications drive demand for soft robots that exceed current strength limitations while preserving inherent compliance advantages.
Logistics and warehousing sectors present emerging opportunities for load-bearing soft robotics. E-commerce growth necessitates automated systems capable of handling diverse package weights and shapes without damage. Current soft robotic grippers struggle with heavier items, creating market demand for enhanced load-bearing capabilities. Agricultural automation similarly requires soft robots that can harvest and transport substantial loads while adapting to irregular crop geometries.
Defense and aerospace applications increasingly seek soft robotic solutions for equipment handling, maintenance operations, and human augmentation systems. These sectors demand high strength-to-weight ratios and reliability under extreme conditions, pushing requirements for advanced load-bearing soft robotic technologies.
The convergence of artificial intelligence, advanced materials science, and manufacturing capabilities is expanding addressable markets for soft robotics. Industries previously reliant on rigid automation are recognizing soft robotics potential, provided strength limitations can be overcome while maintaining compliance characteristics that define the technology's core value proposition.
Current Limitations in Soft Robot Load Capacity
Soft robotics faces significant structural limitations that fundamentally constrain load-bearing performance. The inherent compliance of soft materials, while advantageous for safe human-robot interaction and adaptability, creates a trade-off with mechanical strength. Current soft robots typically utilize elastomeric materials such as silicone rubber, which exhibit low elastic moduli ranging from 0.1 to 10 MPa, compared to rigid materials that can exceed 200 GPa. This material property disparity results in substantial deformation under load, limiting payload capacity to typically less than 10% of the robot's own weight.
Actuator design represents another critical bottleneck in load-bearing capability. Pneumatic actuators, the most common actuation method in soft robotics, generate relatively low forces due to pressure limitations and the compliant nature of the actuator walls. Maximum operating pressures are typically constrained to 100-300 kPa to prevent material failure, resulting in force outputs significantly lower than traditional rigid actuators. Additionally, the balloon-like expansion of pneumatic chambers under pressure often works against the desired motion direction, further reducing effective load capacity.
Structural buckling and instability issues plague soft robotic systems under load conditions. The lack of rigid skeletal support means that soft robots are susceptible to unpredictable deformation patterns when subjected to external forces. This instability manifests as loss of positional accuracy, reduced repeatability, and potential complete structural collapse under loads that would be trivial for rigid systems. The nonlinear relationship between applied load and resulting deformation makes precise control extremely challenging.
Control system limitations compound the mechanical constraints. Traditional control algorithms designed for rigid robots are inadequate for soft systems due to the complex, nonlinear dynamics and infinite degrees of freedom inherent in soft materials. The difficulty in accurately modeling and predicting soft robot behavior under varying loads results in poor force regulation and position control, further limiting practical load-bearing applications.
Manufacturing and material consistency issues also contribute to load capacity limitations. Current fabrication methods for soft robots, including molding and 3D printing, often produce components with material property variations and structural imperfections. These inconsistencies create weak points that fail prematurely under load, preventing the achievement of theoretical maximum load capacities predicted by material properties alone.
Actuator design represents another critical bottleneck in load-bearing capability. Pneumatic actuators, the most common actuation method in soft robotics, generate relatively low forces due to pressure limitations and the compliant nature of the actuator walls. Maximum operating pressures are typically constrained to 100-300 kPa to prevent material failure, resulting in force outputs significantly lower than traditional rigid actuators. Additionally, the balloon-like expansion of pneumatic chambers under pressure often works against the desired motion direction, further reducing effective load capacity.
Structural buckling and instability issues plague soft robotic systems under load conditions. The lack of rigid skeletal support means that soft robots are susceptible to unpredictable deformation patterns when subjected to external forces. This instability manifests as loss of positional accuracy, reduced repeatability, and potential complete structural collapse under loads that would be trivial for rigid systems. The nonlinear relationship between applied load and resulting deformation makes precise control extremely challenging.
Control system limitations compound the mechanical constraints. Traditional control algorithms designed for rigid robots are inadequate for soft systems due to the complex, nonlinear dynamics and infinite degrees of freedom inherent in soft materials. The difficulty in accurately modeling and predicting soft robot behavior under varying loads results in poor force regulation and position control, further limiting practical load-bearing applications.
Manufacturing and material consistency issues also contribute to load capacity limitations. Current fabrication methods for soft robots, including molding and 3D printing, often produce components with material property variations and structural imperfections. These inconsistencies create weak points that fail prematurely under load, preventing the achievement of theoretical maximum load capacities predicted by material properties alone.
Existing Load-Bearing Enhancement Solutions
01 Structural design optimization for enhanced load-bearing
Soft robotic systems can achieve improved load-bearing capability through optimized structural designs, including the use of reinforced frameworks, skeletal structures, and geometric configurations that distribute forces more effectively. These designs often incorporate rigid or semi-rigid elements integrated with soft materials to create hybrid structures that maintain flexibility while supporting heavier loads. The structural optimization may involve specific patterns, layering techniques, or internal support mechanisms that enhance mechanical strength without compromising the inherent compliance of soft robotics.- Structural design optimization for load distribution: Soft robotic systems can enhance load-bearing capability through optimized structural designs that effectively distribute forces across the entire structure. This includes the use of specific geometric configurations, reinforced frameworks, and strategic placement of load-bearing elements to maximize strength while maintaining flexibility. The structural optimization focuses on balancing the inherent compliance of soft materials with the need for mechanical stability under load.
- Advanced material selection and composite integration: The load-bearing capacity of soft robots can be significantly improved through the selection and integration of advanced materials with enhanced mechanical properties. This involves combining soft elastomeric materials with reinforcing elements such as fiber composites, fabric layers, or embedded rigid components. The material composition is engineered to provide both the compliance necessary for soft robotics and the structural integrity required for supporting substantial loads.
- Pneumatic and hydraulic actuation systems: Load-bearing capability in soft robotics can be enhanced through sophisticated pneumatic or hydraulic actuation mechanisms that provide controlled stiffness and force generation. These systems utilize pressurized fluids or gases within flexible chambers to create variable rigidity, allowing the soft robot to adapt its load-bearing capacity based on operational requirements. The actuation design enables dynamic adjustment of mechanical properties for different loading conditions.
- Variable stiffness mechanisms and locking systems: Soft robotic systems can incorporate variable stiffness mechanisms that allow for controlled transitions between compliant and rigid states, thereby enhancing load-bearing performance when needed. These mechanisms may include jamming technologies, phase-change materials, or mechanical locking systems that can be activated to temporarily increase structural rigidity. This approach enables soft robots to maintain flexibility during manipulation tasks while providing enhanced load support when required.
- Multi-chamber and segmented architecture: The implementation of multi-chamber or segmented architectural designs in soft robotics provides improved load distribution and bearing capacity through compartmentalized structures. This design approach divides the soft robotic body into multiple independent or interconnected segments, each capable of contributing to overall load support. The segmented architecture allows for localized reinforcement, redundancy in load paths, and adaptive stiffness control across different regions of the soft robot.
02 Advanced materials for increased strength and durability
The selection and development of advanced materials play a crucial role in improving load-bearing capacity of soft robots. This includes the use of high-strength elastomers, composite materials, fiber-reinforced polymers, and smart materials that can withstand greater forces while maintaining flexibility. Material innovations may involve specific formulations, layering of different materials with complementary properties, or the incorporation of strengthening elements such as fibers or particles that enhance mechanical performance under load conditions.Expand Specific Solutions03 Pneumatic and hydraulic actuation systems for load support
Pneumatic and hydraulic actuation mechanisms can significantly enhance the load-bearing capability of soft robots by providing controlled pressure distribution and force generation. These systems utilize pressurized fluids or gases within chambers or channels to create stiffness on demand, allowing the soft robot to support heavier loads when needed. The actuation systems may include multiple chambers, variable pressure control, or specialized valve configurations that enable dynamic adjustment of load-bearing capacity based on operational requirements.Expand Specific Solutions04 Variable stiffness mechanisms and locking systems
Variable stiffness technologies enable soft robots to transition between compliant and rigid states, thereby enhancing load-bearing capability when required. These mechanisms may include jamming systems, phase-change materials, or mechanical locking devices that can be activated to increase structural rigidity. The ability to dynamically control stiffness allows soft robots to adapt to different load conditions, providing flexibility during manipulation tasks while offering stability and strength when supporting heavy objects.Expand Specific Solutions05 Integrated sensing and control for load management
Advanced sensing and control systems enable soft robots to monitor and respond to load conditions in real-time, optimizing their load-bearing performance. These systems incorporate force sensors, pressure sensors, or strain gauges that provide feedback on the loads being experienced, allowing for adaptive control strategies. The integration of intelligent control algorithms enables the soft robot to adjust its configuration, stiffness, or actuation parameters to maintain stability and prevent damage when handling heavy loads, thereby extending the operational capabilities and safety margins.Expand Specific Solutions
Key Players in Soft Robotics and Actuator Industry
The soft robotics industry for enhanced load-bearing capability is in a rapidly evolving growth phase, driven by increasing demand for adaptive automation solutions across manufacturing, healthcare, and logistics sectors. The market demonstrates significant expansion potential as traditional rigid robotics face limitations in handling delicate or irregularly shaped objects. Technology maturity varies considerably across the competitive landscape, with leading academic institutions like Harvard College, Cornell University, and École Polytechnique Fédérale de Lausanne conducting foundational research in soft actuator materials and biomimetic designs. Chinese universities including Zhejiang University, Harbin Institute of Technology, and South China University of Technology are advancing pneumatic control systems and flexible gripper technologies. Commercial players such as Beijing Soft Robot Technology Co., Ltd. and Oxipital AI represent the transition from laboratory concepts to market-ready solutions, focusing on food processing and industrial applications. The technology remains in early commercialization stages, with significant opportunities for breakthrough innovations in material science and control algorithms.
President & Fellows of Harvard College
Technical Solution: Harvard has developed innovative pneumatic soft actuators using fiber-reinforced elastomeric enclosures that can generate forces up to 6 times their own weight while maintaining flexibility[1]. Their approach combines bio-inspired design with advanced materials engineering, utilizing silicone-based elastomers reinforced with high-strength fibers to create actuators capable of lifting loads exceeding 3kg. The research focuses on optimizing actuator geometry and fiber orientation to maximize load-bearing capacity while preserving the inherent compliance of soft materials[3]. Their pneumatic network (PneuNet) actuators demonstrate exceptional performance in grasping applications, with the ability to conform to irregular objects while exerting significant gripping forces[5].
Strengths: Pioneer in soft robotics with strong research foundation and bio-inspired designs. Weaknesses: Limited commercial applications and scalability challenges for industrial use.
Zhejiang University
Technical Solution: Zhejiang University has developed advanced soft pneumatic actuators using shape memory alloy (SMA) reinforcement to enhance load-bearing capabilities, achieving lifting capacities of up to 20kg while maintaining soft compliance[8]. Their hybrid approach combines traditional pneumatic actuation with SMA wires strategically embedded within elastomeric matrices to provide additional structural support under load. The research team has optimized actuator morphology through bio-inspired designs, particularly mimicking elephant trunk and octopus arm structures to maximize force transmission efficiency[10]. Their multi-material fabrication techniques enable precise control over stiffness gradients, allowing for adaptive load distribution and enhanced durability in demanding applications[12].
Strengths: Strong integration of multiple actuation principles and bio-inspired design expertise. Weaknesses: Complex manufacturing processes and potential reliability issues with hybrid systems.
Core Innovations in Soft Robot Structural Design
Magnetic-induced stiffness changed soft robot drive module and production method thereof
PatentActiveUS20220040870A1
Innovation
- A magnetic-induced stiffness changed soft robot drive module is developed using a magnetic-induced stiffness changed layer made of PDMS and high-purity hydroxyl iron powder, integrated with a two-degree-of-freedom pneumatic driver and a magnetic core, enabling rapid and reversible stiffness adjustment under an electromagnetic field, achieved through 3D printing and a compact design.



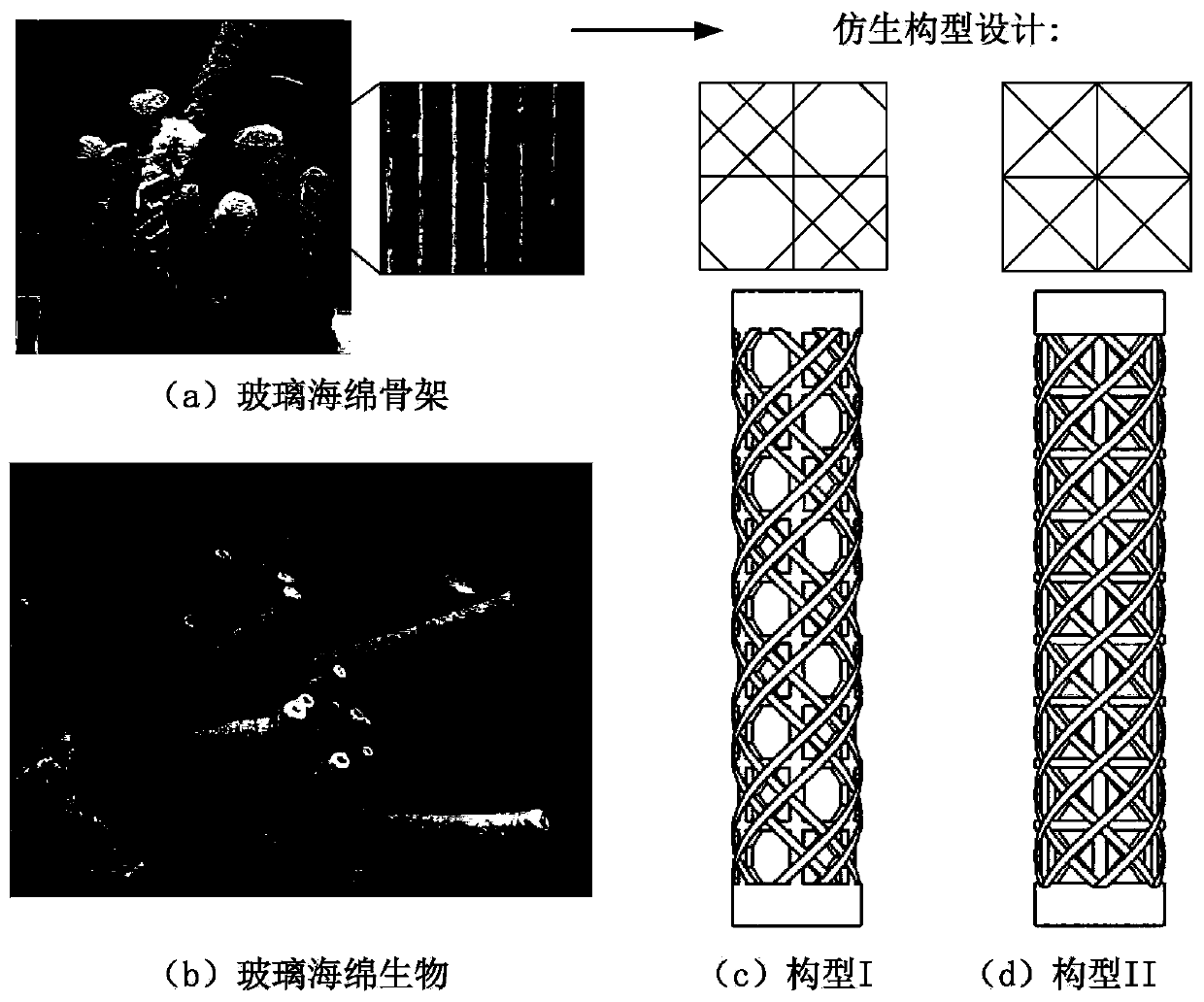
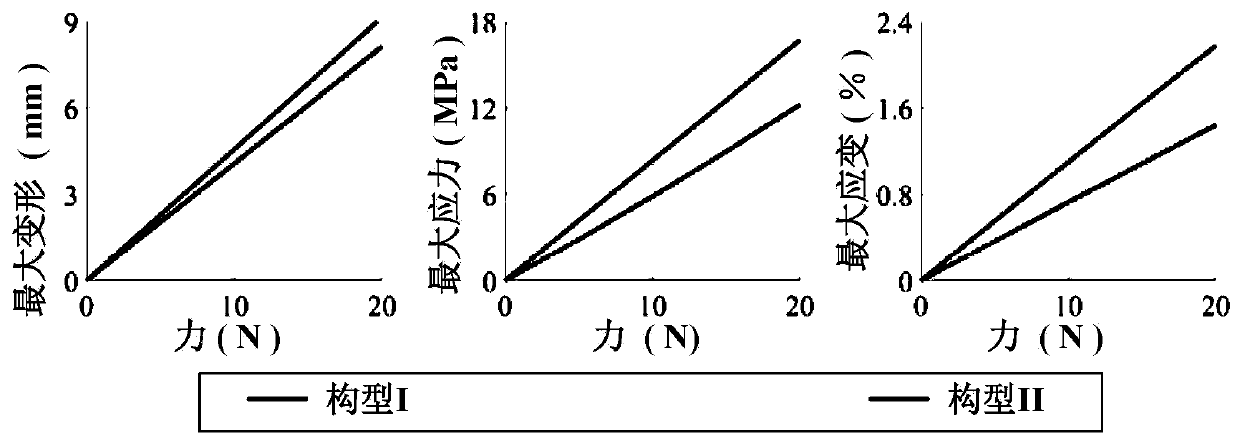
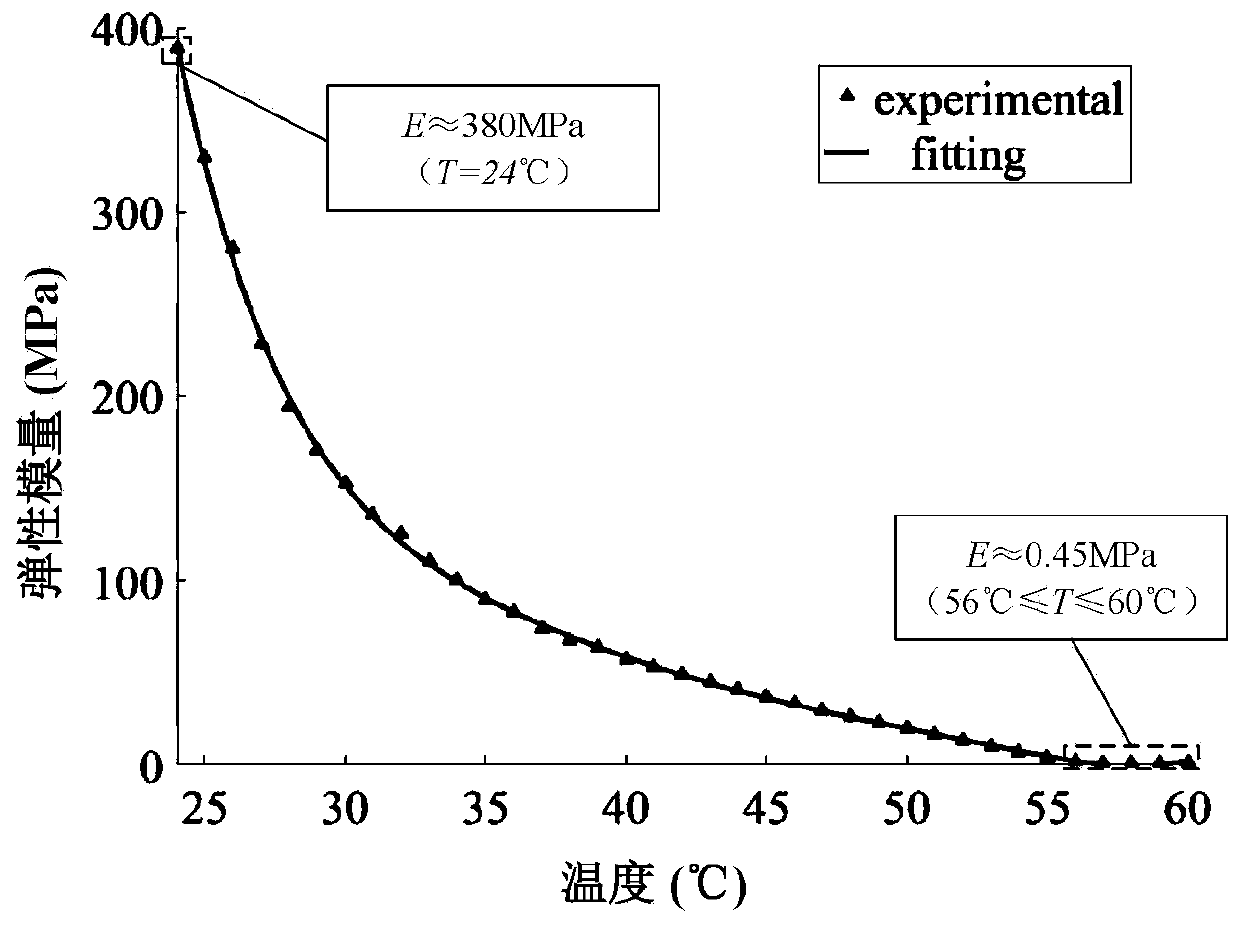
Variable-rigidity soft module with bionic glass sponge skeleton structure and clamp holder
PatentInactiveCN111015721A
Innovation
- The variable-stiffness software module adopts a glass sponge skeleton structure, including an air cavity, a variable-stiffness structure, a trachea, a rigid base, a flexible heating layer, an elastic body and a central limiting layer. The module is lightweight by combining thermoplastic starch plastic and carbon fiber heating wires. quality, high stiffness and wide range of variable stiffness.

Material Science Advances for Soft Robot Strength
The development of advanced materials represents a fundamental breakthrough in enhancing the load-bearing capabilities of soft robotics systems. Traditional elastomeric materials, while providing excellent flexibility and compliance, have historically limited the structural integrity required for heavy-duty applications. Recent innovations in polymer science have introduced fiber-reinforced elastomers that maintain softness while significantly improving tensile strength and durability.
Smart materials integration has emerged as a transformative approach, incorporating shape memory alloys and electroactive polymers within soft robot architectures. These materials enable dynamic stiffness modulation, allowing robots to transition between compliant and rigid states based on operational requirements. Variable stiffness mechanisms achieved through thermally activated polymers and magneto-rheological elastomers provide unprecedented control over mechanical properties during operation.
Biomimetic material design draws inspiration from natural systems, particularly the hierarchical structures found in biological tissues. Researchers have developed composite materials that replicate the collagen fiber arrangements in tendons and muscles, creating artificial materials with superior strength-to-weight ratios. These bio-inspired composites demonstrate remarkable resilience under cyclic loading conditions while maintaining the flexibility essential for soft robotic applications.
Nanocomposite technologies have revolutionized material performance through the incorporation of carbon nanotubes, graphene, and ceramic nanoparticles into polymer matrices. These reinforcements create materials with enhanced mechanical properties without compromising the inherent softness required for safe human-robot interaction. The strategic distribution of nanofillers enables localized strengthening in high-stress regions while preserving compliance in areas requiring flexibility.
Manufacturing innovations in 3D printing and additive manufacturing have enabled the creation of gradient materials with spatially varying mechanical properties. Multi-material printing techniques allow for seamless integration of rigid and soft components within single structures, optimizing load distribution and stress management. These manufacturing advances support the development of functionally graded materials that adapt their properties to specific loading conditions and operational environments.
Smart materials integration has emerged as a transformative approach, incorporating shape memory alloys and electroactive polymers within soft robot architectures. These materials enable dynamic stiffness modulation, allowing robots to transition between compliant and rigid states based on operational requirements. Variable stiffness mechanisms achieved through thermally activated polymers and magneto-rheological elastomers provide unprecedented control over mechanical properties during operation.
Biomimetic material design draws inspiration from natural systems, particularly the hierarchical structures found in biological tissues. Researchers have developed composite materials that replicate the collagen fiber arrangements in tendons and muscles, creating artificial materials with superior strength-to-weight ratios. These bio-inspired composites demonstrate remarkable resilience under cyclic loading conditions while maintaining the flexibility essential for soft robotic applications.
Nanocomposite technologies have revolutionized material performance through the incorporation of carbon nanotubes, graphene, and ceramic nanoparticles into polymer matrices. These reinforcements create materials with enhanced mechanical properties without compromising the inherent softness required for safe human-robot interaction. The strategic distribution of nanofillers enables localized strengthening in high-stress regions while preserving compliance in areas requiring flexibility.
Manufacturing innovations in 3D printing and additive manufacturing have enabled the creation of gradient materials with spatially varying mechanical properties. Multi-material printing techniques allow for seamless integration of rigid and soft components within single structures, optimizing load distribution and stress management. These manufacturing advances support the development of functionally graded materials that adapt their properties to specific loading conditions and operational environments.
Safety Standards for Load-Bearing Soft Robotic Applications
The development of safety standards for load-bearing soft robotic applications represents a critical regulatory frontier that must evolve alongside technological advancement. Current safety frameworks primarily derive from traditional rigid robotics standards, which inadequately address the unique characteristics and failure modes of soft robotic systems. The inherent compliance and deformability of soft robots introduce novel safety considerations that require specialized evaluation criteria and testing protocols.
Existing international standards such as ISO 10218 for industrial robots and ISO 13482 for personal care robots provide foundational safety principles but lack specific provisions for soft material behaviors under load conditions. The viscoelastic properties of soft robotic materials create time-dependent responses that challenge conventional safety assessment methodologies. Material degradation, creep behavior, and fatigue characteristics under cyclic loading conditions necessitate entirely new testing paradigms.
Load-bearing applications amplify safety concerns due to the potential for catastrophic failure when supporting human weight or critical infrastructure. The probabilistic nature of soft material failure requires statistical approaches to safety factor determination, moving beyond deterministic safety margins used in rigid systems. Temperature sensitivity, environmental degradation, and chemical compatibility issues further complicate safety standard development for soft robotic load-bearing applications.
Regulatory bodies including ANSI, IEC, and national safety organizations are beginning to recognize the need for soft robotics-specific standards. Proposed frameworks emphasize continuous monitoring systems, redundant safety mechanisms, and fail-safe design principles tailored to soft material properties. Real-time structural health monitoring becomes essential for load-bearing soft robots, requiring integration of distributed sensing networks and predictive failure algorithms.
The establishment of comprehensive safety standards must balance innovation encouragement with risk mitigation, ensuring that emerging soft robotic technologies can safely transition from laboratory environments to real-world load-bearing applications while maintaining public confidence and regulatory compliance.
Existing international standards such as ISO 10218 for industrial robots and ISO 13482 for personal care robots provide foundational safety principles but lack specific provisions for soft material behaviors under load conditions. The viscoelastic properties of soft robotic materials create time-dependent responses that challenge conventional safety assessment methodologies. Material degradation, creep behavior, and fatigue characteristics under cyclic loading conditions necessitate entirely new testing paradigms.
Load-bearing applications amplify safety concerns due to the potential for catastrophic failure when supporting human weight or critical infrastructure. The probabilistic nature of soft material failure requires statistical approaches to safety factor determination, moving beyond deterministic safety margins used in rigid systems. Temperature sensitivity, environmental degradation, and chemical compatibility issues further complicate safety standard development for soft robotic load-bearing applications.
Regulatory bodies including ANSI, IEC, and national safety organizations are beginning to recognize the need for soft robotics-specific standards. Proposed frameworks emphasize continuous monitoring systems, redundant safety mechanisms, and fail-safe design principles tailored to soft material properties. Real-time structural health monitoring becomes essential for load-bearing soft robots, requiring integration of distributed sensing networks and predictive failure algorithms.
The establishment of comprehensive safety standards must balance innovation encouragement with risk mitigation, ensuring that emerging soft robotic technologies can safely transition from laboratory environments to real-world load-bearing applications while maintaining public confidence and regulatory compliance.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!