

Analyze Sensor Noise Reduction Techniques in Telerobotics Signal Processing
MAY 18, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Telerobotics Signal Processing Background and Objectives
Telerobotics represents a convergence of robotics, telecommunications, and control systems that enables remote operation of robotic systems across significant distances. This technology domain has evolved from early industrial automation concepts in the 1940s to sophisticated space exploration missions and surgical procedures today. The fundamental principle involves transmitting control commands from human operators to remote robots while providing real-time sensory feedback, creating an immersive telepresence experience that bridges physical separation.
The historical development of telerobotics can be traced through several key phases. Initial developments focused on nuclear material handling in the 1950s, followed by underwater exploration applications in the 1960s. The space program significantly accelerated advancement during the 1970s and 1980s, with missions requiring precise remote manipulation capabilities. The advent of internet technologies in the 1990s expanded possibilities for global telerobotic operations, while recent decades have witnessed integration with artificial intelligence and machine learning systems.
Signal processing forms the technological backbone of telerobotics systems, encompassing the acquisition, transmission, filtering, and interpretation of sensor data. Multiple sensor modalities including visual, tactile, force, proximity, and environmental sensors generate continuous data streams that must be processed in real-time. The challenge lies in maintaining signal integrity across communication channels while minimizing latency and maximizing information content for effective human-robot interaction.
Current technological objectives center on achieving near-instantaneous response times despite communication delays, enhancing sensor fusion capabilities for improved situational awareness, and developing adaptive algorithms that compensate for varying network conditions. Advanced signal processing techniques aim to extract maximum information from noisy sensor data while reducing computational overhead and power consumption in remote robotic platforms.
The primary technical goals include developing robust noise reduction algorithms that preserve critical signal characteristics, implementing predictive compensation methods for communication delays, and creating intelligent filtering systems that adapt to dynamic operating environments. These objectives directly support broader telerobotics applications in space exploration, deep-sea research, hazardous material handling, remote surgery, and disaster response scenarios where human presence is impractical or dangerous.
Future development trajectories focus on integrating artificial intelligence for autonomous noise characterization, implementing quantum communication protocols for ultra-secure data transmission, and developing bio-inspired signal processing architectures that mimic human sensory processing capabilities for enhanced performance in complex operational environments.
The historical development of telerobotics can be traced through several key phases. Initial developments focused on nuclear material handling in the 1950s, followed by underwater exploration applications in the 1960s. The space program significantly accelerated advancement during the 1970s and 1980s, with missions requiring precise remote manipulation capabilities. The advent of internet technologies in the 1990s expanded possibilities for global telerobotic operations, while recent decades have witnessed integration with artificial intelligence and machine learning systems.
Signal processing forms the technological backbone of telerobotics systems, encompassing the acquisition, transmission, filtering, and interpretation of sensor data. Multiple sensor modalities including visual, tactile, force, proximity, and environmental sensors generate continuous data streams that must be processed in real-time. The challenge lies in maintaining signal integrity across communication channels while minimizing latency and maximizing information content for effective human-robot interaction.
Current technological objectives center on achieving near-instantaneous response times despite communication delays, enhancing sensor fusion capabilities for improved situational awareness, and developing adaptive algorithms that compensate for varying network conditions. Advanced signal processing techniques aim to extract maximum information from noisy sensor data while reducing computational overhead and power consumption in remote robotic platforms.
The primary technical goals include developing robust noise reduction algorithms that preserve critical signal characteristics, implementing predictive compensation methods for communication delays, and creating intelligent filtering systems that adapt to dynamic operating environments. These objectives directly support broader telerobotics applications in space exploration, deep-sea research, hazardous material handling, remote surgery, and disaster response scenarios where human presence is impractical or dangerous.
Future development trajectories focus on integrating artificial intelligence for autonomous noise characterization, implementing quantum communication protocols for ultra-secure data transmission, and developing bio-inspired signal processing architectures that mimic human sensory processing capabilities for enhanced performance in complex operational environments.
Market Demand for Low-Latency Telerobotic Systems
The global telerobotics market is experiencing unprecedented growth driven by the critical need for low-latency systems across multiple industrial sectors. Healthcare applications represent the most demanding segment, where surgical telerobotics require latency below 10 milliseconds to ensure patient safety and surgical precision. The COVID-19 pandemic accelerated adoption of remote surgical procedures, creating sustained demand for ultra-responsive telerobotic platforms that can handle complex sensor data processing without compromising real-time performance.
Manufacturing and industrial automation sectors are increasingly adopting telerobotic systems for hazardous environment operations, including nuclear facility maintenance, deep-sea exploration, and chemical processing. These applications demand robust sensor noise reduction capabilities combined with minimal signal processing delays to maintain operational safety and efficiency. The integration of advanced manufacturing processes with remote operation capabilities has become essential for maintaining competitiveness in global markets.
Space exploration and defense applications constitute rapidly expanding market segments where low-latency telerobotics enable critical mission success. Satellite servicing missions, planetary exploration rovers, and military reconnaissance operations require instantaneous response capabilities despite challenging communication environments. These sectors drive demand for sophisticated noise reduction algorithms that can operate effectively under extreme conditions while maintaining sub-millisecond response times.
The emergence of 5G networks and edge computing infrastructure is fundamentally transforming market expectations for telerobotic system performance. Industries previously constrained by communication latency limitations are now exploring telerobotic solutions for applications ranging from precision agriculture to remote infrastructure inspection. This technological evolution creates substantial market opportunities for systems that can leverage advanced sensor fusion and noise reduction techniques.
Consumer and service robotics markets are beginning to adopt telerobotic capabilities for applications including elderly care, home automation, and educational platforms. These emerging applications require cost-effective solutions that balance performance with affordability, driving demand for efficient sensor noise reduction techniques that can operate on resource-constrained hardware platforms while maintaining acceptable latency characteristics.
The convergence of artificial intelligence, advanced sensor technologies, and high-speed communication networks is creating new market categories where traditional telerobotic limitations no longer apply. Industries are increasingly willing to invest in premium telerobotic solutions that demonstrate measurable improvements in operational efficiency, safety, and capability expansion through superior sensor signal processing performance.
Manufacturing and industrial automation sectors are increasingly adopting telerobotic systems for hazardous environment operations, including nuclear facility maintenance, deep-sea exploration, and chemical processing. These applications demand robust sensor noise reduction capabilities combined with minimal signal processing delays to maintain operational safety and efficiency. The integration of advanced manufacturing processes with remote operation capabilities has become essential for maintaining competitiveness in global markets.
Space exploration and defense applications constitute rapidly expanding market segments where low-latency telerobotics enable critical mission success. Satellite servicing missions, planetary exploration rovers, and military reconnaissance operations require instantaneous response capabilities despite challenging communication environments. These sectors drive demand for sophisticated noise reduction algorithms that can operate effectively under extreme conditions while maintaining sub-millisecond response times.
The emergence of 5G networks and edge computing infrastructure is fundamentally transforming market expectations for telerobotic system performance. Industries previously constrained by communication latency limitations are now exploring telerobotic solutions for applications ranging from precision agriculture to remote infrastructure inspection. This technological evolution creates substantial market opportunities for systems that can leverage advanced sensor fusion and noise reduction techniques.
Consumer and service robotics markets are beginning to adopt telerobotic capabilities for applications including elderly care, home automation, and educational platforms. These emerging applications require cost-effective solutions that balance performance with affordability, driving demand for efficient sensor noise reduction techniques that can operate on resource-constrained hardware platforms while maintaining acceptable latency characteristics.
The convergence of artificial intelligence, advanced sensor technologies, and high-speed communication networks is creating new market categories where traditional telerobotic limitations no longer apply. Industries are increasingly willing to invest in premium telerobotic solutions that demonstrate measurable improvements in operational efficiency, safety, and capability expansion through superior sensor signal processing performance.
Current Sensor Noise Challenges in Telerobotics
Telerobotics systems face significant sensor noise challenges that fundamentally impact operational precision and reliability. The inherent latency in remote communication channels, often ranging from milliseconds to several seconds depending on distance and transmission medium, creates temporal misalignment between sensor data acquisition and processing. This delay compounds noise effects, as traditional filtering techniques struggle to maintain real-time performance while preserving signal integrity.
Environmental interference represents a primary noise source in telerobotics applications. Electromagnetic interference from industrial equipment, wireless communication systems, and power infrastructure introduces high-frequency artifacts into sensor signals. Temperature fluctuations affect sensor calibration and introduce thermal noise, particularly problematic in space-based or extreme environment operations where temperature variations can exceed 200 degrees Celsius.
Mechanical vibrations from robotic actuators and external sources create low-frequency noise components that interfere with precise positioning and force feedback systems. These vibrations propagate through the robotic structure, contaminating accelerometer, gyroscope, and strain gauge measurements. The coupling between multiple sensor modalities further complicates noise characterization, as vibration-induced noise in one sensor can correlate with noise in adjacent sensors.
Signal quantization errors become pronounced in telerobotics due to the need for data compression during transmission. Limited bandwidth constraints force systems to reduce signal resolution, introducing quantization noise that accumulates across multiple sensor channels. This is particularly challenging for haptic feedback systems where subtle force variations must be preserved for operator perception.
Cross-talk between sensor channels presents another significant challenge, especially in densely packed robotic systems. Electrical coupling between sensor circuits creates correlated noise patterns that traditional independent filtering approaches cannot effectively address. This inter-channel interference is exacerbated by the high-gain amplification required for weak sensor signals in remote environments.
Power supply variations in remote robotic systems introduce systematic noise components. Battery voltage fluctuations, solar panel output variations, and power conversion inefficiencies create time-varying noise characteristics that challenge adaptive filtering algorithms. These power-related noise sources often exhibit non-stationary behavior, making conventional noise modeling approaches inadequate for effective mitigation.
Environmental interference represents a primary noise source in telerobotics applications. Electromagnetic interference from industrial equipment, wireless communication systems, and power infrastructure introduces high-frequency artifacts into sensor signals. Temperature fluctuations affect sensor calibration and introduce thermal noise, particularly problematic in space-based or extreme environment operations where temperature variations can exceed 200 degrees Celsius.
Mechanical vibrations from robotic actuators and external sources create low-frequency noise components that interfere with precise positioning and force feedback systems. These vibrations propagate through the robotic structure, contaminating accelerometer, gyroscope, and strain gauge measurements. The coupling between multiple sensor modalities further complicates noise characterization, as vibration-induced noise in one sensor can correlate with noise in adjacent sensors.
Signal quantization errors become pronounced in telerobotics due to the need for data compression during transmission. Limited bandwidth constraints force systems to reduce signal resolution, introducing quantization noise that accumulates across multiple sensor channels. This is particularly challenging for haptic feedback systems where subtle force variations must be preserved for operator perception.
Cross-talk between sensor channels presents another significant challenge, especially in densely packed robotic systems. Electrical coupling between sensor circuits creates correlated noise patterns that traditional independent filtering approaches cannot effectively address. This inter-channel interference is exacerbated by the high-gain amplification required for weak sensor signals in remote environments.
Power supply variations in remote robotic systems introduce systematic noise components. Battery voltage fluctuations, solar panel output variations, and power conversion inefficiencies create time-varying noise characteristics that challenge adaptive filtering algorithms. These power-related noise sources often exhibit non-stationary behavior, making conventional noise modeling approaches inadequate for effective mitigation.
Existing Noise Reduction Solutions for Telerobotic Sensors
01 Digital signal processing algorithms for noise reduction
Advanced digital signal processing techniques are employed to filter and reduce noise in sensor signals. These algorithms analyze the frequency characteristics of the signal and noise components to selectively attenuate unwanted noise while preserving the desired signal information. Mathematical filtering approaches and adaptive algorithms are used to optimize noise reduction performance across different operating conditions.- Digital signal processing algorithms for noise reduction: Advanced digital signal processing techniques are employed to reduce noise in sensor systems through algorithmic approaches. These methods include adaptive filtering, spectral subtraction, and statistical noise modeling to enhance signal quality. The algorithms can be implemented in real-time processing systems to continuously monitor and reduce various types of sensor noise including thermal, shot, and flicker noise.
- Hardware-based noise suppression circuits: Dedicated hardware circuits and components are designed to minimize noise at the sensor level before digital processing. These solutions include low-noise amplifiers, shielding techniques, and specialized circuit topologies that reduce electromagnetic interference and thermal noise. The hardware approaches focus on preventing noise generation and coupling in the analog signal path.
- Adaptive noise cancellation systems: Adaptive systems that dynamically adjust their noise reduction parameters based on real-time analysis of the sensor environment and noise characteristics. These systems use machine learning algorithms and feedback mechanisms to optimize noise reduction performance for varying operating conditions. The adaptive approach allows for automatic tuning of noise reduction parameters without manual intervention.
- Multi-sensor fusion for noise mitigation: Techniques that combine data from multiple sensors to reduce noise through correlation and redundancy analysis. This approach leverages the statistical properties of noise across different sensors to improve overall signal-to-noise ratio. The fusion methods can distinguish between correlated signals and uncorrelated noise to enhance measurement accuracy.
- Frequency domain noise filtering techniques: Methods that operate in the frequency domain to identify and suppress noise components while preserving desired signal content. These techniques include Fourier transform-based filtering, wavelet denoising, and spectral analysis approaches. The frequency domain methods are particularly effective for removing periodic noise and interference patterns that have distinct spectral signatures.
02 Hardware-based noise suppression circuits
Dedicated hardware circuits and components are integrated into sensor systems to minimize noise at the source. These circuits include analog filters, shielding techniques, and specialized amplification stages that reduce electromagnetic interference and thermal noise. The hardware approach focuses on preventing noise generation and propagation within the sensor circuitry.Expand Specific Solutions03 Adaptive filtering and machine learning approaches
Intelligent filtering systems that adapt to changing noise conditions using machine learning algorithms and adaptive signal processing techniques. These methods continuously learn from the signal characteristics and automatically adjust filtering parameters to optimize noise reduction performance. The adaptive nature allows for real-time optimization based on environmental conditions and signal patterns.Expand Specific Solutions04 Multi-sensor fusion and correlation techniques
Noise reduction methods that utilize multiple sensors and correlation analysis to distinguish between actual signals and noise components. By comparing and combining data from multiple sensor sources, these techniques can identify and eliminate noise patterns while enhancing signal reliability. Statistical correlation and sensor redundancy are key principles in this approach.Expand Specific Solutions05 Spectral analysis and frequency domain processing
Techniques that operate in the frequency domain to identify and suppress noise components based on their spectral characteristics. These methods transform sensor signals into frequency representations, allowing for precise identification of noise frequencies and selective filtering. Spectral subtraction and frequency masking are commonly employed to achieve effective noise reduction.Expand Specific Solutions
Key Players in Telerobotics and Signal Processing
The sensor noise reduction techniques in telerobotics signal processing market is experiencing rapid growth driven by increasing demand for precision in remote operations across healthcare, manufacturing, and space exploration sectors. The industry is in an expansion phase with significant market potential, as telerobotics applications become more sophisticated and widespread. Technology maturity varies considerably among key players, with established giants like Sony Group Corp., Intel Corp., and NEC Corp. leading in advanced signal processing capabilities, while specialized companies such as UBTECH Robotics Corp. and Amicro Semiconductor focus on robotic-specific solutions. Companies like Keysight Technologies and Rohde & Schwarz provide essential testing and measurement infrastructure, while automotive leaders including DENSO Corp. and Continental Automotive GmbH drive innovation in sensor integration. The competitive landscape shows a mix of mature semiconductor technologies and emerging AI-enhanced noise reduction algorithms, indicating a market transitioning from traditional filtering methods to intelligent, adaptive signal processing solutions.
Sony Group Corp.
Technical Solution: Sony leverages its extensive sensor technology expertise to develop integrated noise reduction solutions for telerobotics. Their approach focuses on sensor-level noise mitigation using advanced CMOS image sensors with built-in noise reduction capabilities, combined with proprietary signal processing algorithms. The company implements multi-sensor fusion techniques that correlate data from different sensor types to identify and eliminate noise patterns. Their solutions particularly excel in visual and audio sensor processing, utilizing machine learning models trained on diverse noise environments to adaptively filter unwanted signals in real-time telerobotic applications.
Strengths: Superior sensor hardware quality and extensive multimedia processing experience. Weaknesses: Limited focus on non-visual sensor modalities and higher cost structure.
UBTECH Robotics Corp. Ltd.
Technical Solution: UBTECH specializes in developing comprehensive noise reduction frameworks specifically designed for humanoid and service robots operating in teleoperation modes. Their technology stack includes proprietary algorithms for filtering sensor noise from accelerometers, gyroscopes, force sensors, and vision systems used in their robotic platforms. The company implements adaptive Kalman filtering combined with deep learning-based noise prediction models that learn from operational environments. Their solutions are optimized for real-time performance in consumer and educational robotics applications, with particular emphasis on maintaining stable communication links and accurate sensor feedback during remote operation scenarios.
Strengths: Specialized robotics focus and integrated hardware-software solutions. Weaknesses: Limited scalability to industrial applications and smaller R&D resources compared to tech giants.
Core Innovations in Adaptive Filtering for Telerobotics
Using blind source separation to reduce noise in a sensor signal
PatentActiveUS20240311978A1
Innovation
- The implementation of a computer system using blind source separation algorithms that shifts a single sensor signal into multiple versions, allowing a blind source separator to distinguish correlated signal components from uncorrelated noise components, even in high noise conditions, by maximizing independence across shifted signals.




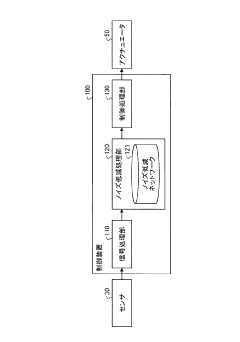
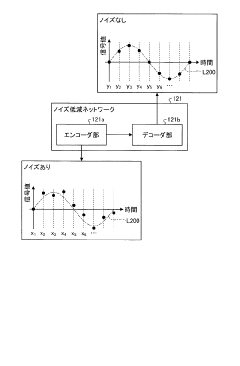
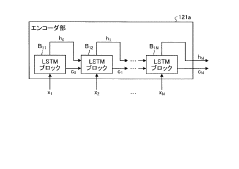
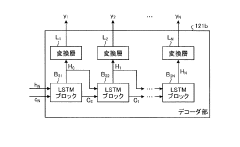
Control device
PatentActiveJP2021077030A
Innovation
- A control device utilizing a recurrent neural network trained to learn the correspondence between a sensor signal with noise and a noise-free signal, combined with signal processing units to reduce noise and improve control performance.
Safety Standards for Telerobotic Signal Integrity
Safety standards for telerobotic signal integrity represent a critical framework ensuring reliable and secure operation of remote robotic systems. These standards encompass comprehensive protocols that govern signal transmission quality, data validation mechanisms, and fault tolerance requirements across telerobotic networks. The primary objective focuses on maintaining operational safety while preserving signal fidelity throughout the entire communication chain.
International standardization bodies have established fundamental requirements for telerobotic signal integrity, including ISO 13482 for personal care robots and IEC 61508 for functional safety systems. These frameworks mandate specific signal-to-noise ratio thresholds, typically requiring minimum 40dB SNR for critical control signals and 30dB for non-critical telemetry data. Additionally, standards specify maximum allowable latency parameters, generally limiting control loop delays to under 100 milliseconds for safety-critical applications.
Signal validation protocols constitute essential components of safety standards, requiring real-time monitoring of communication channels through redundant verification systems. These protocols mandate implementation of cyclic redundancy checks, digital signatures, and timestamp validation to detect signal corruption or unauthorized interference. Standards also require automatic fallback mechanisms when signal integrity falls below acceptable thresholds.
Compliance frameworks establish mandatory testing procedures for telerobotic systems, including electromagnetic compatibility assessments, signal degradation simulations, and cybersecurity vulnerability evaluations. These testing protocols must demonstrate system resilience under various interference conditions, including radio frequency interference, power fluctuations, and network congestion scenarios.
Certification processes require comprehensive documentation of signal processing architectures, including detailed specifications of noise reduction algorithms, filtering mechanisms, and error correction protocols. Standards mandate regular auditing of signal integrity performance metrics and continuous monitoring of system compliance throughout operational lifecycles.
Emerging regulatory developments address advanced telerobotic applications, incorporating requirements for artificial intelligence-driven signal processing systems and adaptive noise reduction technologies. These evolving standards emphasize the need for transparent algorithmic decision-making processes and explainable signal processing methodologies to ensure accountability in safety-critical telerobotic operations.
International standardization bodies have established fundamental requirements for telerobotic signal integrity, including ISO 13482 for personal care robots and IEC 61508 for functional safety systems. These frameworks mandate specific signal-to-noise ratio thresholds, typically requiring minimum 40dB SNR for critical control signals and 30dB for non-critical telemetry data. Additionally, standards specify maximum allowable latency parameters, generally limiting control loop delays to under 100 milliseconds for safety-critical applications.
Signal validation protocols constitute essential components of safety standards, requiring real-time monitoring of communication channels through redundant verification systems. These protocols mandate implementation of cyclic redundancy checks, digital signatures, and timestamp validation to detect signal corruption or unauthorized interference. Standards also require automatic fallback mechanisms when signal integrity falls below acceptable thresholds.
Compliance frameworks establish mandatory testing procedures for telerobotic systems, including electromagnetic compatibility assessments, signal degradation simulations, and cybersecurity vulnerability evaluations. These testing protocols must demonstrate system resilience under various interference conditions, including radio frequency interference, power fluctuations, and network congestion scenarios.
Certification processes require comprehensive documentation of signal processing architectures, including detailed specifications of noise reduction algorithms, filtering mechanisms, and error correction protocols. Standards mandate regular auditing of signal integrity performance metrics and continuous monitoring of system compliance throughout operational lifecycles.
Emerging regulatory developments address advanced telerobotic applications, incorporating requirements for artificial intelligence-driven signal processing systems and adaptive noise reduction technologies. These evolving standards emphasize the need for transparent algorithmic decision-making processes and explainable signal processing methodologies to ensure accountability in safety-critical telerobotic operations.
Human-Robot Interface Optimization Strategies
The optimization of human-robot interfaces in telerobotics systems represents a critical convergence point where sensor noise reduction techniques directly impact operational effectiveness. Modern telerobotic applications demand sophisticated interface strategies that can seamlessly integrate denoised sensor data into intuitive control paradigms, enabling operators to perform complex tasks with precision despite inherent signal processing challenges.
Haptic feedback optimization constitutes a primary interface strategy, where force and tactile sensors must deliver clean, interpretable signals to human operators. Advanced filtering algorithms, including adaptive Kalman filters and machine learning-based noise suppression, ensure that haptic interfaces provide accurate force reflection without introducing artificial vibrations or delayed responses that could compromise operator performance.
Visual interface enhancement through sensor fusion represents another crucial optimization approach. By combining data from multiple imaging sensors and applying real-time noise reduction algorithms, telerobotic systems can present operators with clear, stable visual feeds that maintain spatial accuracy and temporal consistency. This integration often employs predictive filtering techniques that anticipate sensor noise patterns and preemptively compensate for signal degradation.
Multimodal interface synchronization addresses the challenge of maintaining coherent information flow across different sensory channels. Optimization strategies focus on temporal alignment of denoised audio, visual, and haptic data streams, ensuring that operators receive synchronized feedback that accurately represents the remote environment. This synchronization becomes particularly critical when dealing with varying latency characteristics across different sensor types.
Adaptive interface personalization leverages machine learning algorithms to customize noise reduction parameters based on individual operator preferences and task requirements. These systems continuously monitor operator performance metrics and automatically adjust filtering parameters, interface sensitivity, and feedback modalities to optimize human-robot collaboration effectiveness while minimizing cognitive load and operational fatigue.
Haptic feedback optimization constitutes a primary interface strategy, where force and tactile sensors must deliver clean, interpretable signals to human operators. Advanced filtering algorithms, including adaptive Kalman filters and machine learning-based noise suppression, ensure that haptic interfaces provide accurate force reflection without introducing artificial vibrations or delayed responses that could compromise operator performance.
Visual interface enhancement through sensor fusion represents another crucial optimization approach. By combining data from multiple imaging sensors and applying real-time noise reduction algorithms, telerobotic systems can present operators with clear, stable visual feeds that maintain spatial accuracy and temporal consistency. This integration often employs predictive filtering techniques that anticipate sensor noise patterns and preemptively compensate for signal degradation.
Multimodal interface synchronization addresses the challenge of maintaining coherent information flow across different sensory channels. Optimization strategies focus on temporal alignment of denoised audio, visual, and haptic data streams, ensuring that operators receive synchronized feedback that accurately represents the remote environment. This synchronization becomes particularly critical when dealing with varying latency characteristics across different sensor types.
Adaptive interface personalization leverages machine learning algorithms to customize noise reduction parameters based on individual operator preferences and task requirements. These systems continuously monitor operator performance metrics and automatically adjust filtering parameters, interface sensitivity, and feedback modalities to optimize human-robot collaboration effectiveness while minimizing cognitive load and operational fatigue.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!