

Telerobotics Visual Processing vs Infrared Scanning: Application Fit
MAY 18, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Telerobotics Visual Processing Background and Objectives
Telerobotics represents a convergence of robotics, telecommunications, and advanced sensing technologies that enables remote operation and control of robotic systems across vast distances. This field has evolved from early industrial automation concepts in the 1940s to sophisticated space exploration missions and surgical procedures today. The integration of visual processing capabilities has become increasingly critical as telerobotics applications demand higher precision, real-time decision-making, and enhanced situational awareness for remote operators.
The historical development of telerobotics visual processing can be traced through several key phases. Initial systems relied on simple camera feeds with basic image transmission capabilities. The advent of digital image processing in the 1980s introduced computational enhancement techniques, while the 1990s brought real-time video compression and improved bandwidth utilization. Recent decades have witnessed the integration of artificial intelligence, machine learning algorithms, and advanced computer vision techniques that enable autonomous decision-making and predictive analysis within telerobotic systems.
Current technological trends indicate a shift toward intelligent visual processing systems that combine multiple sensing modalities. These systems increasingly incorporate depth perception, object recognition, motion tracking, and environmental mapping capabilities. The emergence of 5G networks and edge computing has further accelerated the development of low-latency visual processing solutions, enabling near-instantaneous response times critical for precision applications.
The primary objectives driving telerobotics visual processing development center on achieving human-level or superior visual perception in remote environments. Key goals include minimizing operator cognitive load through intelligent scene interpretation, providing enhanced situational awareness beyond human visual capabilities, and enabling autonomous task execution with minimal human intervention. These systems aim to overcome traditional limitations such as lighting variations, distance-related image degradation, and bandwidth constraints that have historically challenged remote operations.
Performance optimization remains a central focus, with objectives targeting sub-millisecond processing latencies, high-resolution image analysis, and robust operation across diverse environmental conditions. The integration of predictive algorithms and adaptive processing capabilities represents another crucial objective, allowing systems to anticipate operational requirements and adjust processing parameters dynamically. These technological pursuits ultimately serve the broader goal of expanding human operational capabilities into previously inaccessible or hazardous environments while maintaining safety, precision, and efficiency standards comparable to direct human operation.
The historical development of telerobotics visual processing can be traced through several key phases. Initial systems relied on simple camera feeds with basic image transmission capabilities. The advent of digital image processing in the 1980s introduced computational enhancement techniques, while the 1990s brought real-time video compression and improved bandwidth utilization. Recent decades have witnessed the integration of artificial intelligence, machine learning algorithms, and advanced computer vision techniques that enable autonomous decision-making and predictive analysis within telerobotic systems.
Current technological trends indicate a shift toward intelligent visual processing systems that combine multiple sensing modalities. These systems increasingly incorporate depth perception, object recognition, motion tracking, and environmental mapping capabilities. The emergence of 5G networks and edge computing has further accelerated the development of low-latency visual processing solutions, enabling near-instantaneous response times critical for precision applications.
The primary objectives driving telerobotics visual processing development center on achieving human-level or superior visual perception in remote environments. Key goals include minimizing operator cognitive load through intelligent scene interpretation, providing enhanced situational awareness beyond human visual capabilities, and enabling autonomous task execution with minimal human intervention. These systems aim to overcome traditional limitations such as lighting variations, distance-related image degradation, and bandwidth constraints that have historically challenged remote operations.
Performance optimization remains a central focus, with objectives targeting sub-millisecond processing latencies, high-resolution image analysis, and robust operation across diverse environmental conditions. The integration of predictive algorithms and adaptive processing capabilities represents another crucial objective, allowing systems to anticipate operational requirements and adjust processing parameters dynamically. These technological pursuits ultimately serve the broader goal of expanding human operational capabilities into previously inaccessible or hazardous environments while maintaining safety, precision, and efficiency standards comparable to direct human operation.
Market Demand for Advanced Telerobotics Sensing Solutions
The global telerobotics market is experiencing unprecedented growth driven by increasing demand for remote operation capabilities across multiple industries. Manufacturing sectors are particularly driving adoption, as companies seek to enhance operational safety while maintaining precision in hazardous environments. The COVID-19 pandemic has accelerated this trend, with organizations recognizing the critical importance of contactless operations and remote workforce capabilities.
Healthcare applications represent one of the fastest-growing segments for advanced telerobotics sensing solutions. Surgical robotics systems require sophisticated visual processing capabilities to provide surgeons with high-definition, real-time imagery during minimally invasive procedures. Meanwhile, infrared scanning technologies are gaining traction in patient monitoring and diagnostic applications, where thermal imaging can detect physiological changes without direct contact.
The defense and security sector demonstrates substantial demand for both visual processing and infrared scanning technologies in telerobotics applications. Military operations increasingly rely on unmanned systems for reconnaissance, bomb disposal, and surveillance missions. These applications require robust sensing solutions that can operate effectively in diverse environmental conditions, from desert heat to arctic cold, making the choice between visual and infrared technologies application-specific.
Industrial inspection and maintenance markets are driving significant demand for telerobotics systems equipped with advanced sensing capabilities. Oil and gas companies utilize remote-operated vehicles for pipeline inspection, where infrared scanning can detect heat signatures indicating potential leaks or structural weaknesses. Conversely, visual processing systems excel in detailed component inspection and quality control applications where color differentiation and fine detail recognition are paramount.
The space exploration sector continues to push the boundaries of telerobotics sensing technology. Planetary rovers and orbital maintenance systems require sensing solutions that can function reliably in extreme environments with minimal latency tolerance. This market segment often demands hybrid approaches that combine both visual processing and infrared scanning capabilities to maximize operational effectiveness.
Emerging applications in agriculture and environmental monitoring are creating new market opportunities for telerobotics sensing solutions. Precision agriculture systems utilize visual processing for crop health assessment and automated harvesting, while infrared scanning enables soil temperature monitoring and irrigation optimization. These applications highlight the growing need for specialized sensing solutions tailored to specific operational requirements.
The commercial service robotics market is expanding rapidly, with applications ranging from building maintenance to disaster response. These diverse use cases require flexible sensing solutions that can adapt to varying operational conditions and mission requirements, driving demand for both established and innovative sensing technologies.
Healthcare applications represent one of the fastest-growing segments for advanced telerobotics sensing solutions. Surgical robotics systems require sophisticated visual processing capabilities to provide surgeons with high-definition, real-time imagery during minimally invasive procedures. Meanwhile, infrared scanning technologies are gaining traction in patient monitoring and diagnostic applications, where thermal imaging can detect physiological changes without direct contact.
The defense and security sector demonstrates substantial demand for both visual processing and infrared scanning technologies in telerobotics applications. Military operations increasingly rely on unmanned systems for reconnaissance, bomb disposal, and surveillance missions. These applications require robust sensing solutions that can operate effectively in diverse environmental conditions, from desert heat to arctic cold, making the choice between visual and infrared technologies application-specific.
Industrial inspection and maintenance markets are driving significant demand for telerobotics systems equipped with advanced sensing capabilities. Oil and gas companies utilize remote-operated vehicles for pipeline inspection, where infrared scanning can detect heat signatures indicating potential leaks or structural weaknesses. Conversely, visual processing systems excel in detailed component inspection and quality control applications where color differentiation and fine detail recognition are paramount.
The space exploration sector continues to push the boundaries of telerobotics sensing technology. Planetary rovers and orbital maintenance systems require sensing solutions that can function reliably in extreme environments with minimal latency tolerance. This market segment often demands hybrid approaches that combine both visual processing and infrared scanning capabilities to maximize operational effectiveness.
Emerging applications in agriculture and environmental monitoring are creating new market opportunities for telerobotics sensing solutions. Precision agriculture systems utilize visual processing for crop health assessment and automated harvesting, while infrared scanning enables soil temperature monitoring and irrigation optimization. These applications highlight the growing need for specialized sensing solutions tailored to specific operational requirements.
The commercial service robotics market is expanding rapidly, with applications ranging from building maintenance to disaster response. These diverse use cases require flexible sensing solutions that can adapt to varying operational conditions and mission requirements, driving demand for both established and innovative sensing technologies.
Current State of Visual vs Infrared Scanning Technologies
Visual processing technologies in telerobotics have achieved significant maturity, with high-definition cameras and advanced computer vision algorithms enabling real-time object recognition, depth perception, and spatial mapping. Current visual systems typically operate in the visible light spectrum (380-700nm) and leverage machine learning models for autonomous navigation and manipulation tasks. Leading implementations include stereo vision systems, RGB-D cameras, and LiDAR integration, providing millimeter-level precision in controlled lighting conditions.
Modern visual processing platforms utilize GPU-accelerated neural networks for real-time image analysis, achieving processing speeds of 30-60 frames per second. These systems excel in texture recognition, color differentiation, and fine detail detection, making them particularly effective for precision assembly tasks and quality inspection applications. However, visual systems face significant limitations in low-light environments, adverse weather conditions, and scenarios with visual obstructions.
Infrared scanning technologies have evolved substantially, encompassing both thermal infrared (8-14μm) and near-infrared (0.7-1.4μm) spectrum capabilities. Contemporary thermal imaging systems achieve temperature resolution as fine as 0.02°C, enabling detection of heat signatures through smoke, dust, and complete darkness. Advanced infrared sensors now incorporate uncooled microbolometer arrays and quantum well infrared photodetectors, significantly reducing system costs while maintaining high sensitivity.
Current infrared implementations in telerobotics focus on thermal mapping, human detection, and material identification based on thermal properties. These systems demonstrate superior performance in challenging environmental conditions where visual systems fail, including complete darkness, fog, and smoke-filled environments. Processing speeds have improved dramatically, with modern infrared systems achieving real-time thermal analysis at 60Hz refresh rates.
The integration of both technologies represents the current frontier, with hybrid systems combining visual and infrared data streams through sensor fusion algorithms. Multi-spectral approaches leverage the complementary strengths of each technology, using visual processing for detailed texture analysis and infrared scanning for environmental awareness and obstacle detection in degraded visual conditions. This convergence addresses the individual limitations of each technology while maximizing operational versatility across diverse application scenarios.
Modern visual processing platforms utilize GPU-accelerated neural networks for real-time image analysis, achieving processing speeds of 30-60 frames per second. These systems excel in texture recognition, color differentiation, and fine detail detection, making them particularly effective for precision assembly tasks and quality inspection applications. However, visual systems face significant limitations in low-light environments, adverse weather conditions, and scenarios with visual obstructions.
Infrared scanning technologies have evolved substantially, encompassing both thermal infrared (8-14μm) and near-infrared (0.7-1.4μm) spectrum capabilities. Contemporary thermal imaging systems achieve temperature resolution as fine as 0.02°C, enabling detection of heat signatures through smoke, dust, and complete darkness. Advanced infrared sensors now incorporate uncooled microbolometer arrays and quantum well infrared photodetectors, significantly reducing system costs while maintaining high sensitivity.
Current infrared implementations in telerobotics focus on thermal mapping, human detection, and material identification based on thermal properties. These systems demonstrate superior performance in challenging environmental conditions where visual systems fail, including complete darkness, fog, and smoke-filled environments. Processing speeds have improved dramatically, with modern infrared systems achieving real-time thermal analysis at 60Hz refresh rates.
The integration of both technologies represents the current frontier, with hybrid systems combining visual and infrared data streams through sensor fusion algorithms. Multi-spectral approaches leverage the complementary strengths of each technology, using visual processing for detailed texture analysis and infrared scanning for environmental awareness and obstacle detection in degraded visual conditions. This convergence addresses the individual limitations of each technology while maximizing operational versatility across diverse application scenarios.
Existing Visual Processing and Infrared Scanning Solutions
01 Robotic control systems and interfaces for teleoperation
Advanced control systems and user interfaces are essential for effective telerobotics applications. These systems enable operators to remotely control robotic devices with precision and real-time feedback. The interfaces typically include haptic feedback mechanisms, visual displays, and intuitive control methods that allow for seamless human-robot interaction across distances. Such systems are crucial for maintaining operational efficiency and safety in remote robotic operations.- Robotic control systems and interfaces for teleoperation: Advanced control systems and user interfaces are essential for effective telerobotics applications. These systems enable operators to remotely control robotic devices with precision and real-time feedback. The interfaces typically include haptic feedback mechanisms, visual displays, and intuitive control methods that allow for seamless human-robot interaction across distances. Such systems are crucial for maintaining operational efficiency and safety in remote robotic operations.
- Communication protocols and network architectures for remote robotics: Reliable communication systems form the backbone of telerobotics applications, ensuring stable data transmission between operators and remote robotic systems. These protocols handle latency compensation, data compression, and error correction to maintain consistent performance over various network conditions. The architectures support real-time control signals, sensor data feedback, and video streaming capabilities essential for remote operation.
- Sensor integration and feedback systems for telerobotics: Comprehensive sensor networks and feedback mechanisms enable operators to perceive and understand the remote environment effectively. These systems integrate multiple sensor types including visual, tactile, and environmental sensors to provide rich situational awareness. The feedback systems process and transmit sensory information in real-time, allowing operators to make informed decisions and perform precise manipulations remotely.
- Autonomous assistance and AI integration in telerobotic systems: Artificial intelligence and autonomous assistance features enhance telerobotics by reducing operator workload and improving system performance. These technologies provide automated functions such as obstacle avoidance, path planning, and predictive assistance that complement human control. The integration allows for semi-autonomous operation modes where the system can handle routine tasks while maintaining human oversight for complex decisions.
- Safety and reliability mechanisms for remote robotic operations: Safety systems and reliability measures are critical components that ensure secure and dependable telerobotics operations. These mechanisms include fail-safe protocols, emergency stop functions, redundant communication channels, and system monitoring capabilities. The safety features protect both equipment and personnel while maintaining operational continuity even in challenging or unpredictable remote environments.
02 Communication and data transmission protocols for remote robotics
Reliable communication protocols are fundamental to telerobotics applications, ensuring stable data transmission between operators and remote robotic systems. These protocols handle real-time data exchange, command transmission, and status feedback while managing latency and bandwidth limitations. The systems incorporate error correction, data compression, and secure transmission methods to maintain operational integrity in various network conditions.Expand Specific Solutions03 Sensor integration and environmental perception systems
Comprehensive sensor systems enable telerobotics platforms to perceive and interact with their remote environments effectively. These systems integrate multiple sensor types including cameras, proximity sensors, force sensors, and environmental monitoring devices. The sensor data is processed and transmitted to provide operators with situational awareness and enable autonomous decision-making capabilities in complex operational scenarios.Expand Specific Solutions04 Autonomous navigation and path planning for telerobotic systems
Intelligent navigation systems allow telerobotic platforms to operate semi-autonomously while maintaining remote oversight capabilities. These systems incorporate path planning algorithms, obstacle avoidance mechanisms, and adaptive navigation strategies that can function in dynamic environments. The technology enables robots to execute complex missions with minimal direct operator intervention while providing override capabilities when needed.Expand Specific Solutions05 Safety and reliability mechanisms for remote robotic operations
Robust safety systems are critical for telerobotics applications to ensure safe operation in remote or hazardous environments. These mechanisms include fail-safe protocols, emergency stop procedures, system health monitoring, and redundant safety measures. The systems are designed to handle communication failures, equipment malfunctions, and unexpected environmental conditions while protecting both the robotic platform and surrounding areas.Expand Specific Solutions
Key Players in Telerobotics and Sensing Technology Market
The telerobotics visual processing versus infrared scanning technology landscape represents a mature but rapidly evolving market driven by diverse application requirements across healthcare, industrial automation, and defense sectors. The industry has reached significant scale with established players like Microsoft, Sony, and Texas Instruments providing foundational technologies, while specialized companies such as Teledyne FLIR, OMRON, and Wuhan Guide Infrared lead in thermal imaging solutions. Technology maturity varies significantly between segments - visual processing benefits from advanced AI and machine learning capabilities developed by tech giants, whereas infrared scanning technology shows high maturity in hardware but emerging sophistication in processing algorithms. The competitive landscape includes major electronics manufacturers (Philips, Panasonic, FANUC), medical device companies (Terumo, Ambu), and research institutions (Georgia Tech, University of Barcelona), indicating broad cross-industry adoption and continued innovation potential across both complementary technologies.
Microsoft Technology Licensing LLC
Technical Solution: Microsoft develops advanced computer vision and AI-powered visual processing systems for telerobotics through their Azure AI and mixed reality platforms. Their approach combines machine learning algorithms with real-time visual data processing, enabling robots to perform complex object recognition, spatial mapping, and autonomous navigation. The HoloLens technology provides spatial understanding capabilities that can be adapted for telerobotic control systems. Their visual processing solutions leverage cloud computing for enhanced processing power and can handle multiple video streams simultaneously with low latency. The platform supports both 2D and 3D visual processing with advanced depth sensing capabilities.
Strengths: Strong AI and cloud integration capabilities, comprehensive software ecosystem, advanced depth sensing technology. Weaknesses: Dependency on network connectivity for cloud processing, less effective in complete darkness or obscured visibility conditions.
Koninklijke Philips NV
Technical Solution: Philips focuses on medical telerobotics applications, combining both visual processing and infrared technologies for surgical and diagnostic procedures. Their systems integrate high-definition visual cameras with thermal sensing capabilities to provide comprehensive imaging solutions for remote medical procedures. The technology enables surgeons to perform minimally invasive procedures with enhanced visualization, combining real-time video feeds with thermal mapping for tissue analysis. Their solutions offer multi-spectral imaging that can switch between visual and infrared modes based on procedural requirements, providing flexibility in different medical scenarios and improving diagnostic accuracy in telemedical applications.
Strengths: Medical-grade precision and reliability, regulatory compliance for healthcare applications, hybrid imaging capabilities. Weaknesses: Specialized for medical use with limited applicability to other industries, high regulatory requirements increase development costs.
Core Technologies in Telerobotics Sensing Systems
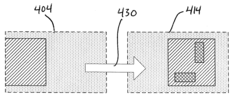
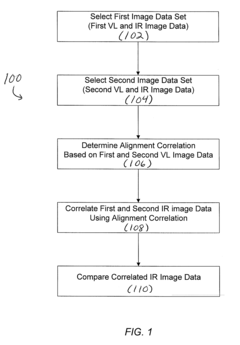
Comparison of Infrared Images
PatentActiveUS20110122251A1
Innovation
- A method that selects and aligns visual-light and infrared image data sets captured from different points of view, using alignment correlations to correlate and compare infrared image data, generating IR comparison image data by subtracting or comparing portions of the correlated images, and displaying the results with visual-light image data for enhanced analysis.
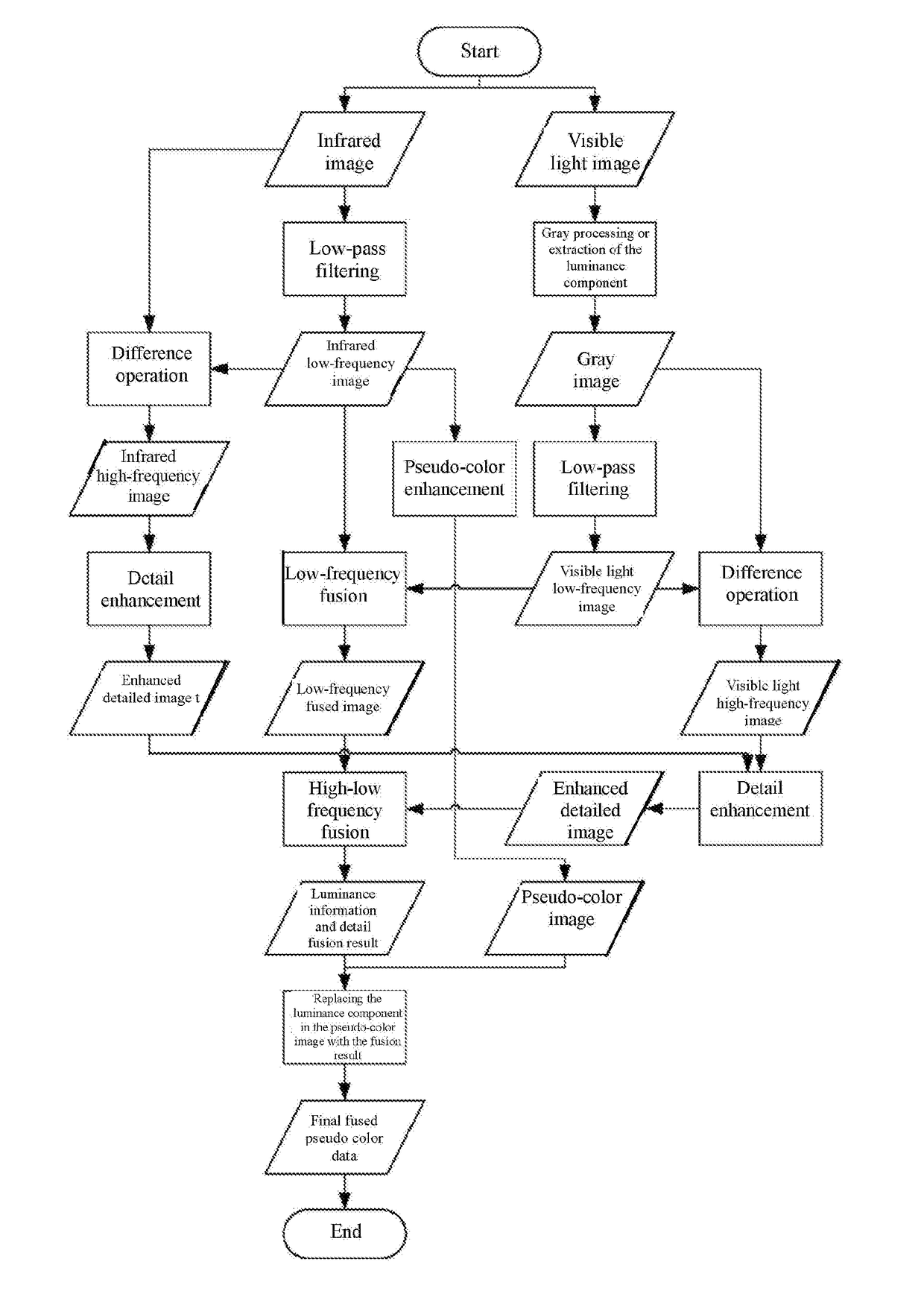
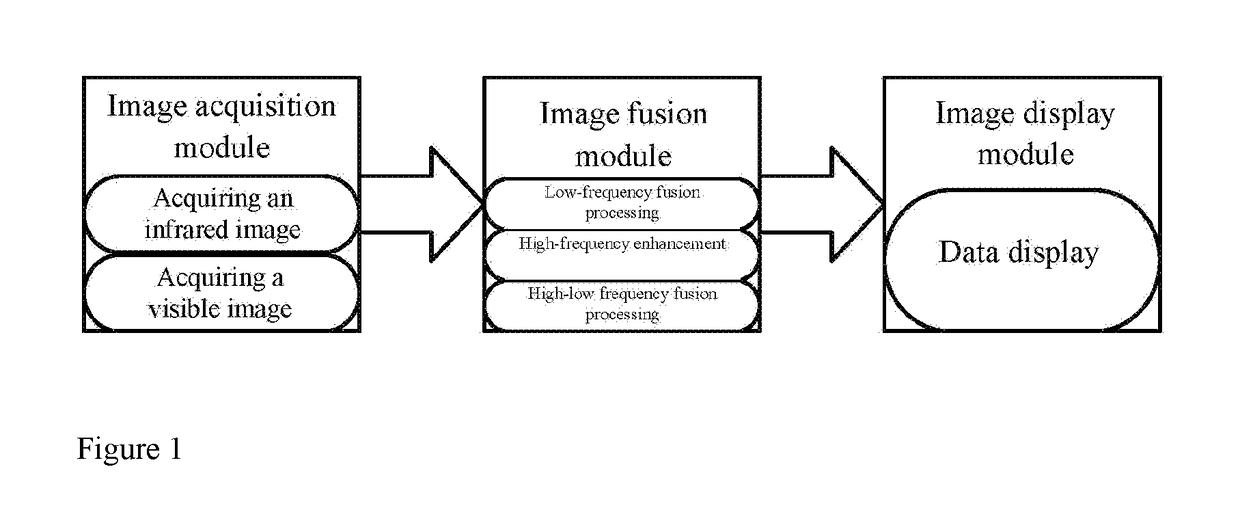
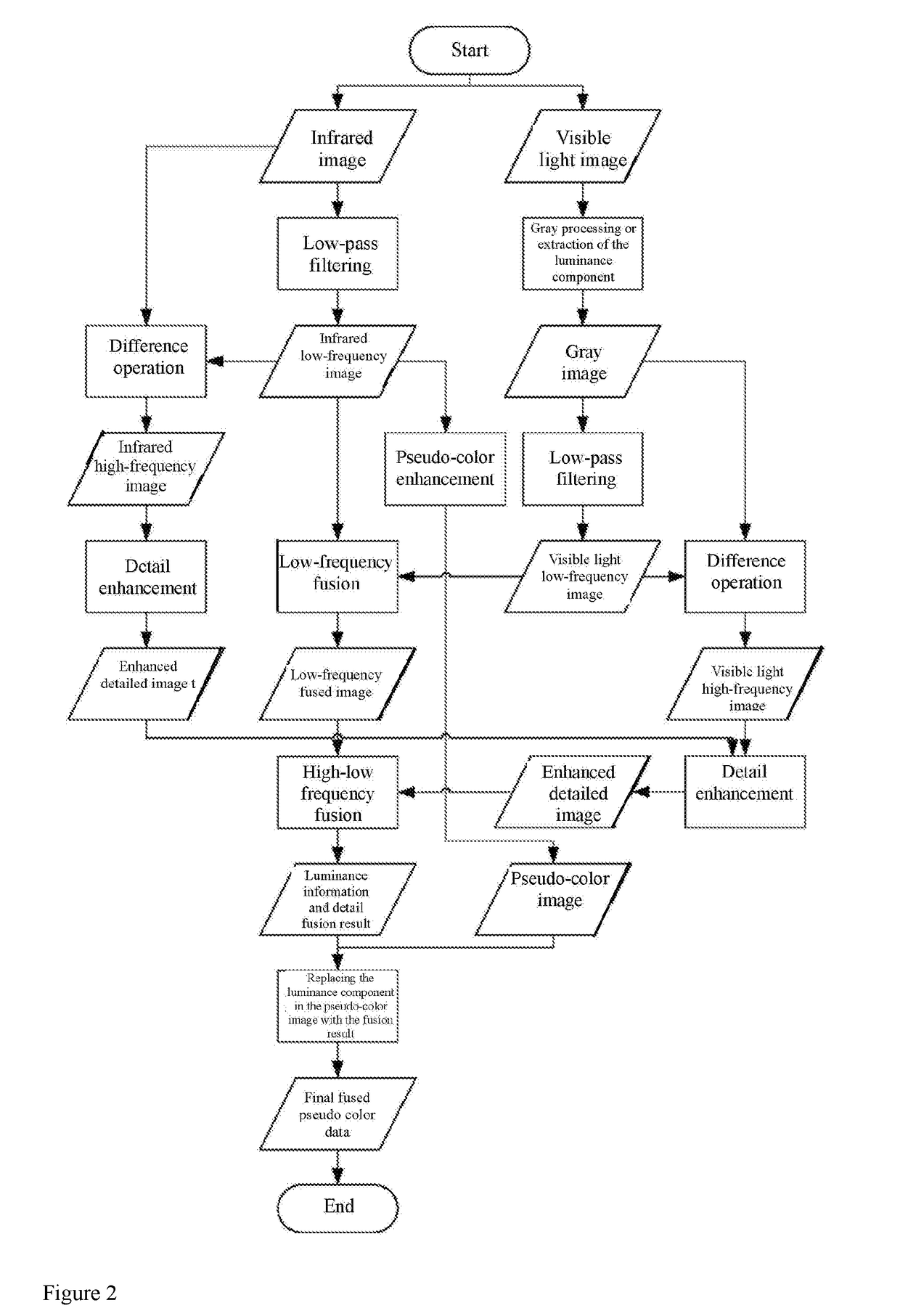
Visible light image and infrared image fusion processing system and fusion method
PatentActiveUS20180227509A1
Innovation
- A visible light image and infrared image fusion processing system that includes an image acquisition module, fusion module, and display module, where images are registered and fused by converting color images to grayscale, filtering low-frequency components, calculating high-frequency components, and adjusting weights based on scene information to enhance detailed information while reducing noise.
Safety Standards for Remote Robotic Operations
Safety standards for remote robotic operations represent a critical framework that governs the deployment and operation of teleoperated systems across various industries. These standards have evolved significantly as remote robotics technology has matured, particularly in applications requiring visual processing and infrared scanning capabilities. The regulatory landscape encompasses multiple international bodies, including ISO, IEC, and industry-specific organizations that establish comprehensive guidelines for safe remote operations.
The fundamental safety architecture for remote robotic systems centers on fail-safe mechanisms and redundant communication protocols. Primary safety requirements mandate that all remote operations must maintain continuous operator oversight with immediate emergency stop capabilities. Communication latency thresholds are strictly defined, typically requiring response times under 100 milliseconds for critical operations, with automatic system shutdown protocols activated when communication delays exceed acceptable parameters.
Visual processing systems in telerobotics must comply with specific image quality and transmission standards to ensure operator situational awareness. Safety protocols require minimum resolution standards, typically 1080p or higher for precision tasks, with mandatory backup visual systems. Color accuracy and real-time transmission capabilities are regulated to prevent misinterpretation of visual data that could lead to operational hazards.
Infrared scanning integration introduces additional safety considerations, particularly regarding thermal signature interpretation and environmental hazard detection. Standards mandate calibration protocols for thermal sensors, requiring regular verification against known temperature references. Operators must receive certified training in thermal image interpretation, with documented competency assessments required for system authorization.
Environmental safety protocols address electromagnetic interference, radiation exposure limits, and operational boundary definitions. Remote systems must incorporate geofencing capabilities to prevent unauthorized area access, with automatic shutdown mechanisms when operational boundaries are exceeded. Power management systems require redundant backup power sources and graceful degradation protocols to ensure safe system shutdown during power failures.
Cybersecurity standards form an integral component of remote robotic safety frameworks. Encrypted communication channels, multi-factor authentication, and intrusion detection systems are mandatory requirements. Regular security audits and penetration testing protocols ensure ongoing system integrity against potential cyber threats that could compromise operational safety.
The fundamental safety architecture for remote robotic systems centers on fail-safe mechanisms and redundant communication protocols. Primary safety requirements mandate that all remote operations must maintain continuous operator oversight with immediate emergency stop capabilities. Communication latency thresholds are strictly defined, typically requiring response times under 100 milliseconds for critical operations, with automatic system shutdown protocols activated when communication delays exceed acceptable parameters.
Visual processing systems in telerobotics must comply with specific image quality and transmission standards to ensure operator situational awareness. Safety protocols require minimum resolution standards, typically 1080p or higher for precision tasks, with mandatory backup visual systems. Color accuracy and real-time transmission capabilities are regulated to prevent misinterpretation of visual data that could lead to operational hazards.
Infrared scanning integration introduces additional safety considerations, particularly regarding thermal signature interpretation and environmental hazard detection. Standards mandate calibration protocols for thermal sensors, requiring regular verification against known temperature references. Operators must receive certified training in thermal image interpretation, with documented competency assessments required for system authorization.
Environmental safety protocols address electromagnetic interference, radiation exposure limits, and operational boundary definitions. Remote systems must incorporate geofencing capabilities to prevent unauthorized area access, with automatic shutdown mechanisms when operational boundaries are exceeded. Power management systems require redundant backup power sources and graceful degradation protocols to ensure safe system shutdown during power failures.
Cybersecurity standards form an integral component of remote robotic safety frameworks. Encrypted communication channels, multi-factor authentication, and intrusion detection systems are mandatory requirements. Regular security audits and penetration testing protocols ensure ongoing system integrity against potential cyber threats that could compromise operational safety.
Application-Specific Sensing Technology Selection Framework
The selection of appropriate sensing technologies in telerobotics applications requires a systematic framework that considers multiple interdependent factors. This framework must balance technical capabilities, operational requirements, and environmental constraints to optimize system performance across diverse application scenarios.
Environmental conditions serve as the primary determinant in technology selection. Visual processing systems excel in well-lit environments with adequate contrast and visibility, making them ideal for indoor manufacturing, precision assembly, and quality inspection tasks. Conversely, infrared scanning demonstrates superior performance in challenging visibility conditions, including darkness, smoke, dust, or extreme weather scenarios commonly encountered in search and rescue operations, military applications, and industrial environments with high particulate matter.
Task complexity and precision requirements significantly influence technology choice. Visual processing offers exceptional spatial resolution and color discrimination capabilities, enabling detailed object recognition, texture analysis, and fine manipulation tasks. This makes it particularly suitable for applications requiring high-precision positioning, such as surgical robotics or electronic component assembly. Infrared scanning, while providing lower spatial resolution, excels in thermal signature detection and can identify objects based on temperature differentials, proving invaluable for leak detection, electrical system monitoring, and biological target identification.
Real-time processing demands and computational resources represent critical selection criteria. Visual processing typically requires substantial computational power for image analysis, pattern recognition, and depth perception algorithms. Modern implementations benefit from GPU acceleration and machine learning optimization but may introduce latency in resource-constrained systems. Infrared scanning generally demands less computational overhead for basic thermal detection but requires sophisticated algorithms for advanced applications like predictive maintenance or medical diagnostics.
Cost considerations encompass both initial investment and operational expenses. Visual processing systems leverage mature, widely available camera technologies with decreasing costs, while infrared sensors remain relatively expensive due to specialized detector materials and cooling requirements. However, the total cost of ownership must include processing hardware, software licensing, and maintenance requirements.
Integration complexity varies significantly between technologies. Visual processing benefits from extensive software libraries, development tools, and industry standards, facilitating rapid prototyping and deployment. Infrared systems often require specialized expertise and custom calibration procedures, potentially extending development timelines and increasing implementation complexity.
The optimal selection framework should incorporate weighted scoring matrices that evaluate each technology against specific application requirements, enabling objective comparison and informed decision-making for telerobotics system designers.
Environmental conditions serve as the primary determinant in technology selection. Visual processing systems excel in well-lit environments with adequate contrast and visibility, making them ideal for indoor manufacturing, precision assembly, and quality inspection tasks. Conversely, infrared scanning demonstrates superior performance in challenging visibility conditions, including darkness, smoke, dust, or extreme weather scenarios commonly encountered in search and rescue operations, military applications, and industrial environments with high particulate matter.
Task complexity and precision requirements significantly influence technology choice. Visual processing offers exceptional spatial resolution and color discrimination capabilities, enabling detailed object recognition, texture analysis, and fine manipulation tasks. This makes it particularly suitable for applications requiring high-precision positioning, such as surgical robotics or electronic component assembly. Infrared scanning, while providing lower spatial resolution, excels in thermal signature detection and can identify objects based on temperature differentials, proving invaluable for leak detection, electrical system monitoring, and biological target identification.
Real-time processing demands and computational resources represent critical selection criteria. Visual processing typically requires substantial computational power for image analysis, pattern recognition, and depth perception algorithms. Modern implementations benefit from GPU acceleration and machine learning optimization but may introduce latency in resource-constrained systems. Infrared scanning generally demands less computational overhead for basic thermal detection but requires sophisticated algorithms for advanced applications like predictive maintenance or medical diagnostics.
Cost considerations encompass both initial investment and operational expenses. Visual processing systems leverage mature, widely available camera technologies with decreasing costs, while infrared sensors remain relatively expensive due to specialized detector materials and cooling requirements. However, the total cost of ownership must include processing hardware, software licensing, and maintenance requirements.
Integration complexity varies significantly between technologies. Visual processing benefits from extensive software libraries, development tools, and industry standards, facilitating rapid prototyping and deployment. Infrared systems often require specialized expertise and custom calibration procedures, potentially extending development timelines and increasing implementation complexity.
The optimal selection framework should incorporate weighted scoring matrices that evaluate each technology against specific application requirements, enabling objective comparison and informed decision-making for telerobotics system designers.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!