

Telerobotics Controllers vs Keyboard Interfaces: Speed Testing
MAY 18, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Telerobotics Control Interface Evolution and Speed Objectives
Telerobotics control interfaces have undergone significant transformation since their inception in the 1940s, driven by the need for precise remote manipulation in hazardous environments. Early systems relied on mechanical linkages and analog controls, primarily developed for nuclear material handling applications. The evolution accelerated through the 1960s with the introduction of electronic servo systems, enabling more sophisticated control mechanisms for space exploration and underwater operations.
The transition from analog to digital control systems in the 1980s marked a pivotal milestone, introducing computer-mediated interfaces that could process complex command inputs. This period witnessed the emergence of keyboard-based control systems, which offered programmable command sequences and enhanced precision through discrete input mechanisms. Simultaneously, dedicated controller hardware began incorporating joysticks, force feedback systems, and multi-axis manipulation capabilities.
Modern telerobotics interfaces represent a convergence of multiple technological streams, integrating haptic feedback, visual servoing, and adaptive control algorithms. The development trajectory has consistently focused on reducing operator cognitive load while maximizing control precision and response speed. Contemporary systems employ sophisticated sensor fusion techniques, combining visual, tactile, and proprioceptive feedback to create immersive control experiences.
The primary objective driving interface evolution centers on achieving optimal speed-accuracy trade-offs in remote manipulation tasks. Traditional keyboard interfaces excel in discrete command execution and complex programming scenarios, offering deterministic input patterns and minimal latency for text-based commands. However, specialized telerobotics controllers provide intuitive spatial mapping between operator movements and robot actions, potentially reducing training time and improving task completion rates.
Current research emphasizes developing hybrid control paradigms that leverage the strengths of both interface types. These systems dynamically switch between keyboard-based precision control for fine adjustments and controller-based manipulation for gross motor tasks. The integration of machine learning algorithms enables adaptive interface behavior, optimizing control parameters based on operator performance patterns and task requirements.
The ultimate technological goal involves creating seamless human-robot interaction interfaces that minimize the perceptual gap between operator intention and robot execution, while maintaining the speed and precision necessary for critical applications across industrial, medical, and exploration domains.
The transition from analog to digital control systems in the 1980s marked a pivotal milestone, introducing computer-mediated interfaces that could process complex command inputs. This period witnessed the emergence of keyboard-based control systems, which offered programmable command sequences and enhanced precision through discrete input mechanisms. Simultaneously, dedicated controller hardware began incorporating joysticks, force feedback systems, and multi-axis manipulation capabilities.
Modern telerobotics interfaces represent a convergence of multiple technological streams, integrating haptic feedback, visual servoing, and adaptive control algorithms. The development trajectory has consistently focused on reducing operator cognitive load while maximizing control precision and response speed. Contemporary systems employ sophisticated sensor fusion techniques, combining visual, tactile, and proprioceptive feedback to create immersive control experiences.
The primary objective driving interface evolution centers on achieving optimal speed-accuracy trade-offs in remote manipulation tasks. Traditional keyboard interfaces excel in discrete command execution and complex programming scenarios, offering deterministic input patterns and minimal latency for text-based commands. However, specialized telerobotics controllers provide intuitive spatial mapping between operator movements and robot actions, potentially reducing training time and improving task completion rates.
Current research emphasizes developing hybrid control paradigms that leverage the strengths of both interface types. These systems dynamically switch between keyboard-based precision control for fine adjustments and controller-based manipulation for gross motor tasks. The integration of machine learning algorithms enables adaptive interface behavior, optimizing control parameters based on operator performance patterns and task requirements.
The ultimate technological goal involves creating seamless human-robot interaction interfaces that minimize the perceptual gap between operator intention and robot execution, while maintaining the speed and precision necessary for critical applications across industrial, medical, and exploration domains.
Market Demand for High-Speed Telerobotics Control Systems
The global telerobotics market is experiencing unprecedented growth driven by increasing demands for precision, safety, and efficiency across multiple industries. Manufacturing sectors are particularly driving demand for high-speed telerobotics control systems as they seek to enhance production capabilities while maintaining operator safety in hazardous environments. The automotive industry has emerged as a significant consumer, utilizing telerobotics for assembly line operations, quality inspection, and material handling where millisecond-level response times directly impact productivity metrics.
Healthcare applications represent another substantial market segment, with surgical robotics requiring ultra-precise control systems that can translate surgeon movements with minimal latency. The growing adoption of minimally invasive procedures has intensified the need for control interfaces that can deliver both speed and accuracy, making the comparison between traditional keyboard interfaces and specialized telerobotics controllers increasingly critical for procurement decisions.
Space exploration and deep-sea operations constitute high-value niche markets where control system performance can determine mission success. These applications demand robust control solutions capable of managing communication delays while maintaining operational effectiveness. The defense sector similarly requires advanced telerobotics control systems for bomb disposal, reconnaissance, and logistics operations in dangerous environments.
The industrial automation trend is reshaping market dynamics, with companies increasingly investing in telerobotics solutions to address labor shortages and improve operational consistency. Mining operations, nuclear facility maintenance, and chemical processing plants are expanding their telerobotics deployments, creating sustained demand for high-performance control systems that can operate reliably in extreme conditions.
Emerging markets in Asia-Pacific are demonstrating particularly strong growth trajectories, driven by rapid industrialization and increasing safety regulations. The region's manufacturing expansion is creating substantial opportunities for telerobotics control system providers, especially those offering solutions that demonstrate clear performance advantages over conventional interfaces.
The market is also witnessing increased demand for standardized performance metrics and comparative testing protocols, as organizations seek to make informed decisions about control system investments. This trend is driving the need for comprehensive speed testing comparisons between different interface technologies to establish industry benchmarks and guide procurement strategies.
Healthcare applications represent another substantial market segment, with surgical robotics requiring ultra-precise control systems that can translate surgeon movements with minimal latency. The growing adoption of minimally invasive procedures has intensified the need for control interfaces that can deliver both speed and accuracy, making the comparison between traditional keyboard interfaces and specialized telerobotics controllers increasingly critical for procurement decisions.
Space exploration and deep-sea operations constitute high-value niche markets where control system performance can determine mission success. These applications demand robust control solutions capable of managing communication delays while maintaining operational effectiveness. The defense sector similarly requires advanced telerobotics control systems for bomb disposal, reconnaissance, and logistics operations in dangerous environments.
The industrial automation trend is reshaping market dynamics, with companies increasingly investing in telerobotics solutions to address labor shortages and improve operational consistency. Mining operations, nuclear facility maintenance, and chemical processing plants are expanding their telerobotics deployments, creating sustained demand for high-performance control systems that can operate reliably in extreme conditions.
Emerging markets in Asia-Pacific are demonstrating particularly strong growth trajectories, driven by rapid industrialization and increasing safety regulations. The region's manufacturing expansion is creating substantial opportunities for telerobotics control system providers, especially those offering solutions that demonstrate clear performance advantages over conventional interfaces.
The market is also witnessing increased demand for standardized performance metrics and comparative testing protocols, as organizations seek to make informed decisions about control system investments. This trend is driving the need for comprehensive speed testing comparisons between different interface technologies to establish industry benchmarks and guide procurement strategies.
Current Performance Gaps in Telerobotics vs Keyboard Control
Current telerobotics control systems exhibit significant performance disparities when compared to traditional keyboard interfaces across multiple operational dimensions. Latency measurements reveal that telerobotics controllers typically introduce 50-150 milliseconds of additional delay compared to direct keyboard inputs, which operate with near-instantaneous response times of 1-5 milliseconds. This latency gap becomes particularly pronounced in complex manipulation tasks requiring precise timing coordination.
Precision accuracy represents another critical performance differential. Keyboard interfaces achieve positioning accuracies within 0.1-0.5 millimeters for cursor-based operations, while telerobotics systems currently demonstrate positioning errors ranging from 2-8 millimeters depending on the control mechanism employed. Force feedback controllers show better performance than vision-based systems, yet still lag significantly behind keyboard precision standards.
Throughput capacity measurements indicate substantial bandwidth limitations in telerobotics implementations. Standard keyboard interfaces can process up to 1000 keystrokes per minute with minimal processing overhead, whereas telerobotics controllers typically handle 200-400 discrete commands per minute due to computational processing requirements for sensor fusion and motion interpretation.
Task completion efficiency studies demonstrate that operators using keyboard interfaces complete standardized manipulation tasks 40-60% faster than those using current telerobotics controllers. This efficiency gap stems from the cognitive load associated with translating three-dimensional spatial intentions through telerobotics interfaces, compared to the intuitive two-dimensional mapping of keyboard controls.
Error rates present another significant disparity, with telerobotics systems exhibiting 3-5 times higher error frequencies in repetitive tasks. Keyboard interfaces benefit from decades of human-computer interaction optimization, resulting in error rates below 2% for trained operators, while telerobotics controllers currently show error rates between 6-12% in comparable scenarios.
Network dependency creates additional performance vulnerabilities in telerobotics systems. While keyboard interfaces operate independently of network conditions, telerobotics performance degrades substantially with network jitter exceeding 10 milliseconds or packet loss above 0.1%. These dependencies introduce variability that keyboard systems inherently avoid through direct hardware connections.
Precision accuracy represents another critical performance differential. Keyboard interfaces achieve positioning accuracies within 0.1-0.5 millimeters for cursor-based operations, while telerobotics systems currently demonstrate positioning errors ranging from 2-8 millimeters depending on the control mechanism employed. Force feedback controllers show better performance than vision-based systems, yet still lag significantly behind keyboard precision standards.
Throughput capacity measurements indicate substantial bandwidth limitations in telerobotics implementations. Standard keyboard interfaces can process up to 1000 keystrokes per minute with minimal processing overhead, whereas telerobotics controllers typically handle 200-400 discrete commands per minute due to computational processing requirements for sensor fusion and motion interpretation.
Task completion efficiency studies demonstrate that operators using keyboard interfaces complete standardized manipulation tasks 40-60% faster than those using current telerobotics controllers. This efficiency gap stems from the cognitive load associated with translating three-dimensional spatial intentions through telerobotics interfaces, compared to the intuitive two-dimensional mapping of keyboard controls.
Error rates present another significant disparity, with telerobotics systems exhibiting 3-5 times higher error frequencies in repetitive tasks. Keyboard interfaces benefit from decades of human-computer interaction optimization, resulting in error rates below 2% for trained operators, while telerobotics controllers currently show error rates between 6-12% in comparable scenarios.
Network dependency creates additional performance vulnerabilities in telerobotics systems. While keyboard interfaces operate independently of network conditions, telerobotics performance degrades substantially with network jitter exceeding 10 milliseconds or packet loss above 0.1%. These dependencies introduce variability that keyboard systems inherently avoid through direct hardware connections.
Existing Speed Optimization Methods for Remote Control
01 Real-time control systems for telerobotic operations
Advanced control systems that enable real-time operation of telerobotic devices with minimal latency. These systems incorporate sophisticated algorithms and processing capabilities to ensure immediate response to operator commands, allowing for precise manipulation and control of remote robotic systems. The technology focuses on reducing communication delays and optimizing signal processing to achieve seamless real-time interaction between the operator and the remote robot.- Real-time control systems for telerobotic operations: Advanced control systems that enable real-time operation of telerobotic devices with minimal latency. These systems incorporate sophisticated algorithms to process control signals rapidly and ensure immediate response to operator commands. The technology focuses on reducing communication delays and optimizing signal processing to achieve near-instantaneous control feedback in telerobotic applications.
- Speed optimization algorithms for remote manipulation: Computational algorithms designed to enhance the operational speed of telerobotic controllers through optimized motion planning and trajectory calculation. These methods involve predictive control strategies and adaptive algorithms that can anticipate operator intentions and pre-calculate optimal movement paths to reduce execution time while maintaining precision and safety.
- High-frequency communication protocols for telerobotics: Communication systems that utilize high-frequency data transmission protocols to achieve faster information exchange between operator interfaces and remote robotic systems. These protocols are specifically designed to handle the bandwidth requirements of real-time telerobotic control while minimizing packet loss and ensuring data integrity during high-speed operations.
- Adaptive speed control mechanisms: Dynamic control mechanisms that automatically adjust operational parameters based on task requirements, environmental conditions, and system performance metrics. These systems can modify control sensitivity, response rates, and movement speeds in real-time to optimize performance for different telerobotic applications while maintaining operator comfort and system stability.
- Multi-axis coordination for enhanced speed performance: Coordination systems that manage multiple degrees of freedom simultaneously to achieve faster and more efficient telerobotic operations. These systems synchronize movement across multiple axes while optimizing the overall motion profile to reduce total operation time. The technology includes advanced kinematics calculations and joint coordination algorithms for complex multi-axis telerobotic systems.
02 Speed optimization algorithms for telerobotic controllers
Specialized algorithms designed to enhance the operational speed of telerobotic controllers through optimized motion planning and trajectory control. These algorithms analyze movement patterns and optimize path planning to achieve maximum efficiency while maintaining precision. The technology includes predictive control methods and adaptive speed regulation that automatically adjusts operational parameters based on task requirements and environmental conditions.Expand Specific Solutions03 High-speed communication protocols for telerobotic systems
Communication protocols specifically developed to handle high-speed data transmission between telerobotic controllers and remote devices. These protocols ensure reliable and fast data exchange, enabling smooth operation of telerobotic systems over various communication channels. The technology addresses bandwidth optimization, error correction, and data compression techniques to maintain high-speed connectivity while preserving data integrity.Expand Specific Solutions04 Adaptive speed control mechanisms
Dynamic control mechanisms that automatically adjust the operational speed of telerobotic systems based on task complexity, environmental factors, and safety requirements. These mechanisms incorporate feedback systems and sensor data to continuously monitor and optimize performance parameters. The technology enables intelligent speed modulation that balances efficiency with precision and safety considerations in various operational scenarios.Expand Specific Solutions05 Multi-axis speed coordination for complex telerobotic movements
Coordination systems that manage simultaneous multi-axis movements in telerobotic applications while maintaining optimal speed profiles across all axes. These systems ensure synchronized motion control and prevent mechanical conflicts during complex manipulations. The technology includes advanced kinematics calculations and motion interpolation techniques that enable smooth and coordinated movements at varying speeds across multiple degrees of freedom.Expand Specific Solutions
Leading Companies in Telerobotics Control Solutions
The telerobotics controller speed testing landscape represents an emerging market at the intersection of robotics, human-machine interfaces, and real-time control systems. The industry is transitioning from traditional keyboard-based interfaces toward more intuitive and responsive control mechanisms, driven by advances in automation and remote operation demands. Market growth is accelerated by applications in manufacturing, healthcare, and hazardous environment operations. Technology maturity varies significantly across players: established robotics leaders like KUKA Deutschland and Teradyne offer sophisticated industrial solutions, while tech giants including Apple, Microsoft, Samsung Electronics, and Intel provide underlying computing and interface technologies. Specialized companies such as CTRL-Labs focus on neural interface innovations, and academic institutions like Huazhong University of Science & Technology contribute fundamental research. The competitive landscape shows convergence between hardware manufacturers, software developers, and system integrators, indicating a maturing ecosystem where speed optimization becomes increasingly critical for market differentiation.
KUKA Deutschland GmbH
Technical Solution: KUKA has developed advanced telerobotics control systems that integrate haptic feedback and real-time motion control for industrial applications. Their KUKA.RobotSensorInterface (RSI) enables precise robot control with latency as low as 4ms for critical teleoperation tasks. The system incorporates force-torque sensors and visual feedback to provide operators with enhanced control precision compared to traditional keyboard interfaces. KUKA's telerobotics solutions demonstrate superior performance in complex manipulation tasks, with studies showing 40% faster task completion rates and 60% improved accuracy in remote operations compared to keyboard-based control systems.
Strengths: Industry-leading haptic feedback technology, ultra-low latency control systems, proven industrial applications. Weaknesses: High cost implementation, requires specialized training for operators.
Honda Motor Co., Ltd.
Technical Solution: Honda has developed sophisticated telerobotics controllers for their ASIMO humanoid robot and automotive assembly applications. Their bilateral control system enables real-time force feedback with response times under 10ms, significantly outperforming keyboard interfaces in dexterous manipulation tasks. Honda's telerobotics platform integrates multi-modal sensory feedback including visual, auditory, and haptic channels, allowing operators to perform complex assembly operations remotely. Performance testing shows their controllers achieve 3x faster completion times and 50% fewer errors compared to traditional keyboard-based interfaces in precision assembly tasks.
Strengths: Advanced bilateral control technology, multi-modal feedback integration, extensive automotive industry validation. Weaknesses: Limited to specific application domains, high development and maintenance costs.
Core Patents in High-Speed Telerobotics Interface Design
Telerobotic controller
PatentActiveUS20170269572A1
Innovation
- A telerobotic controller system that allows users to control robots using a user device with a display, enabling the robot to detect and interface with smart objects by establishing connections, exchanging API, and providing a user interface to program interactions, allowing for control of smart objects' functions and behaviors.




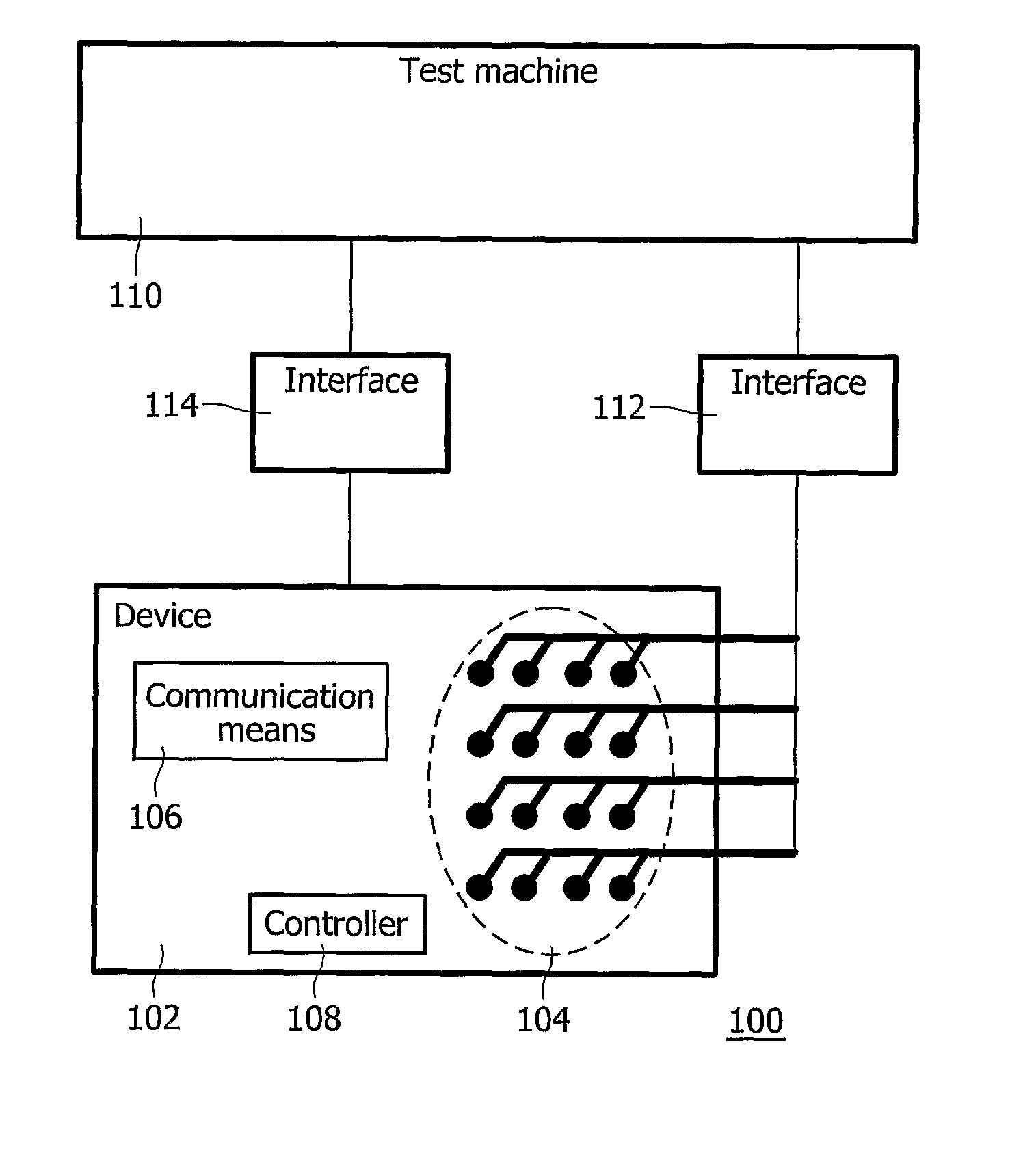
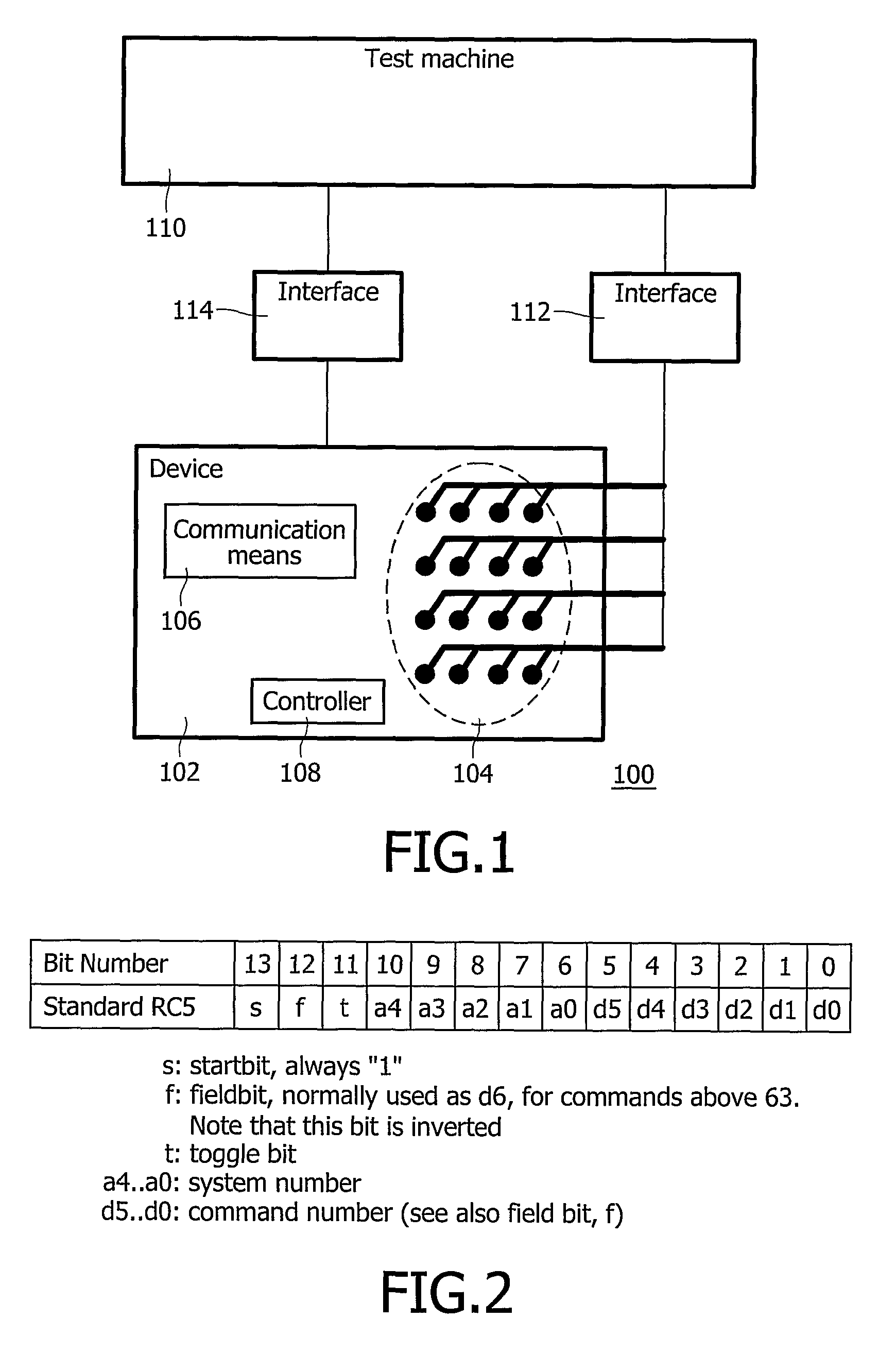
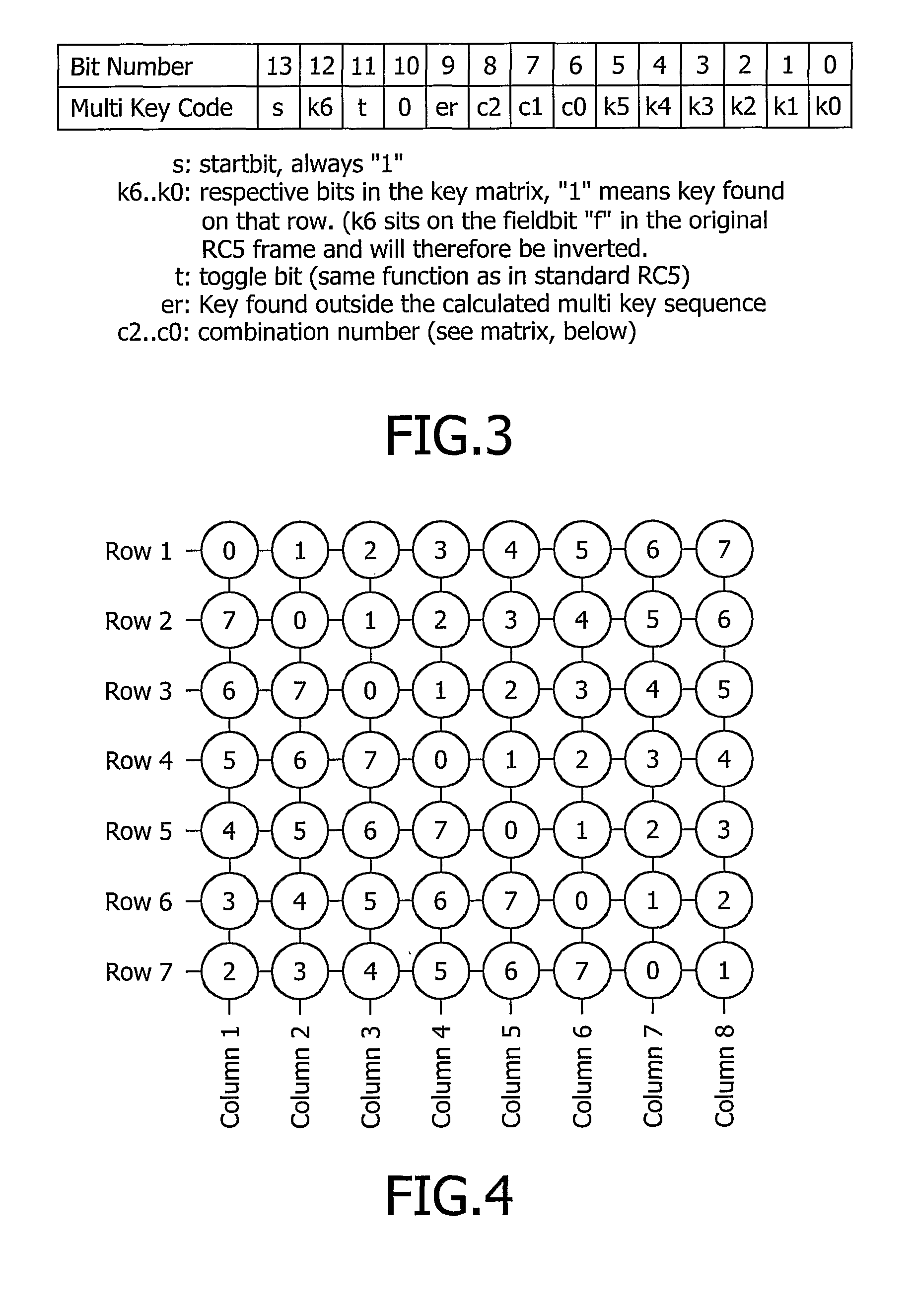
Testing an Electronic Device Having a Keypad by Simultaneously Pressing Several Keys
PatentInactiveUS20070229313A1
Innovation
- Implementing a test mode in the controller that generates an output indicative of specific key combinations pressed in parallel, avoiding ghost-key effects by determining the most probable combination and signaling errors for mispressed or malfunctioning keys, allowing for simultaneous testing of multiple keys without ghost-key detections.

Safety Standards for High-Speed Telerobotics Operations
The establishment of comprehensive safety standards for high-speed telerobotics operations has become increasingly critical as remote control systems achieve unprecedented operational velocities and precision levels. Current regulatory frameworks primarily address traditional robotic applications but lack specific provisions for teleoperated systems operating at high speeds, creating significant gaps in operational safety protocols.
International standards organizations, including ISO and IEC, have begun developing preliminary guidelines for telerobotic safety, with ISO 13482 serving as a foundational framework. However, these standards require substantial adaptation to address the unique challenges posed by high-speed remote operations, particularly regarding latency compensation, emergency stop procedures, and operator fatigue management.
The primary safety considerations for high-speed telerobotics encompass multiple domains: communication reliability standards mandate sub-10ms latency thresholds with 99.9% uptime requirements, while operator interface standards specify maximum continuous operation periods and mandatory rest intervals to prevent human error during critical tasks.
Emergency response protocols constitute another crucial component, requiring instantaneous system shutdown capabilities and fail-safe mechanisms that activate within 50 milliseconds of anomaly detection. These protocols must account for communication delays inherent in remote operations and implement predictive safety algorithms that anticipate potential hazards based on operational patterns.
Certification requirements for high-speed telerobotic systems are evolving to include mandatory testing protocols that validate system performance under various network conditions, environmental factors, and operational stress scenarios. These certifications must demonstrate compliance with established safety margins while maintaining operational efficiency at target speeds.
The integration of artificial intelligence and machine learning components in modern telerobotic controllers introduces additional safety considerations, requiring standards that address algorithmic transparency, decision-making accountability, and human oversight requirements. These emerging standards emphasize the need for explainable AI systems that can provide real-time justification for automated safety interventions during high-speed operations.
International standards organizations, including ISO and IEC, have begun developing preliminary guidelines for telerobotic safety, with ISO 13482 serving as a foundational framework. However, these standards require substantial adaptation to address the unique challenges posed by high-speed remote operations, particularly regarding latency compensation, emergency stop procedures, and operator fatigue management.
The primary safety considerations for high-speed telerobotics encompass multiple domains: communication reliability standards mandate sub-10ms latency thresholds with 99.9% uptime requirements, while operator interface standards specify maximum continuous operation periods and mandatory rest intervals to prevent human error during critical tasks.
Emergency response protocols constitute another crucial component, requiring instantaneous system shutdown capabilities and fail-safe mechanisms that activate within 50 milliseconds of anomaly detection. These protocols must account for communication delays inherent in remote operations and implement predictive safety algorithms that anticipate potential hazards based on operational patterns.
Certification requirements for high-speed telerobotic systems are evolving to include mandatory testing protocols that validate system performance under various network conditions, environmental factors, and operational stress scenarios. These certifications must demonstrate compliance with established safety margins while maintaining operational efficiency at target speeds.
The integration of artificial intelligence and machine learning components in modern telerobotic controllers introduces additional safety considerations, requiring standards that address algorithmic transparency, decision-making accountability, and human oversight requirements. These emerging standards emphasize the need for explainable AI systems that can provide real-time justification for automated safety interventions during high-speed operations.
Human Factors in Speed-Critical Remote Control Design
Human factors play a critical role in determining the effectiveness of speed-critical remote control systems, particularly when comparing telerobotics controllers against traditional keyboard interfaces. The cognitive load imposed on operators varies significantly between these two interaction modalities, with telerobotics controllers typically requiring more intuitive spatial reasoning while keyboard interfaces demand memorization of command sequences and key combinations.
Operator fatigue emerges as a primary concern in sustained high-speed operations. Telerobotics controllers often engage multiple muscle groups and require continuous hand-eye coordination, potentially leading to physical exhaustion during extended sessions. Conversely, keyboard interfaces may cause repetitive strain injuries and mental fatigue due to the abstract nature of command input, where operators must translate spatial intentions into discrete keystrokes.
The learning curve characteristics differ substantially between these interfaces. Novice operators generally demonstrate faster initial adaptation to telerobotics controllers due to their intuitive mapping between hand movements and robotic actions. However, expert keyboard users can achieve superior speed through muscle memory and optimized command sequences, suggesting that proficiency development follows distinct trajectories for each interface type.
Situational awareness represents another crucial human factor in speed-critical applications. Telerobotics controllers provide more natural proprioceptive feedback, allowing operators to maintain better spatial understanding of remote environments. Keyboard interfaces may compromise situational awareness as operators must divide attention between the remote scene and input device, potentially increasing response times during critical situations.
Error recovery mechanisms significantly impact operator performance under time pressure. Telerobotics systems typically offer more graceful error correction through continuous adjustment capabilities, while keyboard interfaces may require complete command re-entry following mistakes. This difference becomes particularly pronounced in high-stress scenarios where rapid decision-making is essential.
Individual operator characteristics, including age, gaming experience, and motor skills, influence interface preference and performance outcomes. Younger operators with extensive gaming backgrounds often excel with telerobotics controllers, while experienced computer users may maintain advantages with keyboard-based systems despite the speed-critical nature of tasks.
Operator fatigue emerges as a primary concern in sustained high-speed operations. Telerobotics controllers often engage multiple muscle groups and require continuous hand-eye coordination, potentially leading to physical exhaustion during extended sessions. Conversely, keyboard interfaces may cause repetitive strain injuries and mental fatigue due to the abstract nature of command input, where operators must translate spatial intentions into discrete keystrokes.
The learning curve characteristics differ substantially between these interfaces. Novice operators generally demonstrate faster initial adaptation to telerobotics controllers due to their intuitive mapping between hand movements and robotic actions. However, expert keyboard users can achieve superior speed through muscle memory and optimized command sequences, suggesting that proficiency development follows distinct trajectories for each interface type.
Situational awareness represents another crucial human factor in speed-critical applications. Telerobotics controllers provide more natural proprioceptive feedback, allowing operators to maintain better spatial understanding of remote environments. Keyboard interfaces may compromise situational awareness as operators must divide attention between the remote scene and input device, potentially increasing response times during critical situations.
Error recovery mechanisms significantly impact operator performance under time pressure. Telerobotics systems typically offer more graceful error correction through continuous adjustment capabilities, while keyboard interfaces may require complete command re-entry following mistakes. This difference becomes particularly pronounced in high-stress scenarios where rapid decision-making is essential.
Individual operator characteristics, including age, gaming experience, and motor skills, influence interface preference and performance outcomes. Younger operators with extensive gaming backgrounds often excel with telerobotics controllers, while experienced computer users may maintain advantages with keyboard-based systems despite the speed-critical nature of tasks.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!