Biomimetic Actuators in Interactive Interfaces: Control Study
APR 20, 202610 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Biomimetic Actuator Technology Background and Control Objectives
Biomimetic actuators represent a revolutionary convergence of biological inspiration and engineering innovation, drawing from nature's most efficient movement mechanisms to create responsive interface technologies. This field emerged from the recognition that biological systems have evolved sophisticated actuation strategies over millions of years, offering unparalleled efficiency, adaptability, and responsiveness that traditional mechanical systems struggle to replicate.
The foundational concept stems from studying natural actuators such as muscle fibers, plant movements, and insect wing mechanisms. These biological systems demonstrate remarkable properties including high power-to-weight ratios, self-healing capabilities, and adaptive responses to environmental stimuli. Early research in the 1990s focused on understanding the molecular mechanisms behind muscle contraction and plant cell wall dynamics, leading to the development of electroactive polymers and shape memory alloys as artificial muscle analogs.
The evolution toward interactive interfaces began with the recognition that human-computer interaction could benefit significantly from tactile feedback systems that mimic biological touch sensations. Traditional haptic feedback mechanisms relied on electromagnetic motors and vibration systems, which provided limited sensory experiences compared to the nuanced feedback possible through biomimetic approaches. This realization drove researchers to explore how biological actuators could be integrated into interface design.
Contemporary biomimetic actuator technologies encompass various approaches including ionic polymer-metal composites, dielectric elastomers, and pneumatic artificial muscles. These systems demonstrate the ability to produce complex motion patterns, variable stiffness characteristics, and distributed sensing capabilities that closely resemble biological counterparts. The integration of these actuators into interactive interfaces has opened new possibilities for creating more intuitive and responsive user experiences.
The primary technical objectives in this domain focus on achieving precise control over actuator behavior while maintaining the inherent advantages of biological systems. Key goals include developing real-time control algorithms that can modulate actuator response based on user interaction patterns, creating scalable manufacturing processes for complex actuator arrays, and establishing robust feedback mechanisms that enable adaptive interface behavior.
Control system development represents a critical challenge, as biomimetic actuators often exhibit nonlinear responses and time-dependent characteristics that differ significantly from conventional actuators. The objective is to create control frameworks that can harness these unique properties while providing predictable and reliable interface performance. This requires sophisticated modeling approaches that capture both the physical dynamics of the actuators and the perceptual requirements of human users.
The foundational concept stems from studying natural actuators such as muscle fibers, plant movements, and insect wing mechanisms. These biological systems demonstrate remarkable properties including high power-to-weight ratios, self-healing capabilities, and adaptive responses to environmental stimuli. Early research in the 1990s focused on understanding the molecular mechanisms behind muscle contraction and plant cell wall dynamics, leading to the development of electroactive polymers and shape memory alloys as artificial muscle analogs.
The evolution toward interactive interfaces began with the recognition that human-computer interaction could benefit significantly from tactile feedback systems that mimic biological touch sensations. Traditional haptic feedback mechanisms relied on electromagnetic motors and vibration systems, which provided limited sensory experiences compared to the nuanced feedback possible through biomimetic approaches. This realization drove researchers to explore how biological actuators could be integrated into interface design.
Contemporary biomimetic actuator technologies encompass various approaches including ionic polymer-metal composites, dielectric elastomers, and pneumatic artificial muscles. These systems demonstrate the ability to produce complex motion patterns, variable stiffness characteristics, and distributed sensing capabilities that closely resemble biological counterparts. The integration of these actuators into interactive interfaces has opened new possibilities for creating more intuitive and responsive user experiences.
The primary technical objectives in this domain focus on achieving precise control over actuator behavior while maintaining the inherent advantages of biological systems. Key goals include developing real-time control algorithms that can modulate actuator response based on user interaction patterns, creating scalable manufacturing processes for complex actuator arrays, and establishing robust feedback mechanisms that enable adaptive interface behavior.
Control system development represents a critical challenge, as biomimetic actuators often exhibit nonlinear responses and time-dependent characteristics that differ significantly from conventional actuators. The objective is to create control frameworks that can harness these unique properties while providing predictable and reliable interface performance. This requires sophisticated modeling approaches that capture both the physical dynamics of the actuators and the perceptual requirements of human users.
Market Demand for Interactive Biomimetic Interface Systems
The global market for interactive biomimetic interface systems is experiencing unprecedented growth driven by the convergence of biological inspiration and advanced human-computer interaction technologies. This emerging sector encompasses applications ranging from prosthetics and rehabilitation devices to consumer electronics and virtual reality systems, where biomimetic actuators serve as critical enabling components for natural and intuitive user experiences.
Healthcare and medical rehabilitation represent the most significant demand drivers for biomimetic interface technologies. The aging global population and increasing prevalence of mobility impairments have created substantial market pressure for advanced prosthetic devices that can replicate natural muscle movement patterns. Biomimetic actuators enable prosthetics to achieve more lifelike motion characteristics, improving user acceptance and functional outcomes compared to traditional mechanical systems.
Consumer electronics manufacturers are increasingly integrating biomimetic interface elements to differentiate their products in saturated markets. Gaming peripherals, haptic feedback devices, and wearable technologies benefit from actuators that can simulate natural tactile sensations and movement patterns. The demand for more immersive user experiences in virtual and augmented reality applications has particularly accelerated interest in biomimetic control systems that can provide realistic force feedback and motion simulation.
Industrial automation and robotics sectors demonstrate growing appetite for biomimetic interface solutions that enhance human-robot collaboration. Manufacturing environments increasingly require intuitive control interfaces that allow operators to interact naturally with robotic systems, reducing training requirements and improving operational efficiency. Biomimetic actuators enable the development of control interfaces that leverage human instinctive movement patterns.
The automotive industry presents emerging opportunities as vehicle interfaces evolve toward more sophisticated human-machine interaction paradigms. Advanced driver assistance systems and autonomous vehicle interfaces require intuitive control mechanisms that can seamlessly transition between human and automated control modes. Biomimetic actuators offer potential solutions for creating natural-feeling steering and control interfaces that adapt to human behavioral patterns.
Research institutions and academic organizations constitute a specialized but influential market segment driving fundamental advances in biomimetic interface technologies. Government funding for assistive technologies and defense applications provides additional market momentum, particularly for applications requiring precise control and natural user interaction capabilities.
Market adoption faces challenges including cost considerations, technical complexity, and regulatory requirements, particularly in medical applications. However, advancing manufacturing techniques and increasing component standardization are gradually addressing these barriers, expanding market accessibility across diverse application domains.
Healthcare and medical rehabilitation represent the most significant demand drivers for biomimetic interface technologies. The aging global population and increasing prevalence of mobility impairments have created substantial market pressure for advanced prosthetic devices that can replicate natural muscle movement patterns. Biomimetic actuators enable prosthetics to achieve more lifelike motion characteristics, improving user acceptance and functional outcomes compared to traditional mechanical systems.
Consumer electronics manufacturers are increasingly integrating biomimetic interface elements to differentiate their products in saturated markets. Gaming peripherals, haptic feedback devices, and wearable technologies benefit from actuators that can simulate natural tactile sensations and movement patterns. The demand for more immersive user experiences in virtual and augmented reality applications has particularly accelerated interest in biomimetic control systems that can provide realistic force feedback and motion simulation.
Industrial automation and robotics sectors demonstrate growing appetite for biomimetic interface solutions that enhance human-robot collaboration. Manufacturing environments increasingly require intuitive control interfaces that allow operators to interact naturally with robotic systems, reducing training requirements and improving operational efficiency. Biomimetic actuators enable the development of control interfaces that leverage human instinctive movement patterns.
The automotive industry presents emerging opportunities as vehicle interfaces evolve toward more sophisticated human-machine interaction paradigms. Advanced driver assistance systems and autonomous vehicle interfaces require intuitive control mechanisms that can seamlessly transition between human and automated control modes. Biomimetic actuators offer potential solutions for creating natural-feeling steering and control interfaces that adapt to human behavioral patterns.
Research institutions and academic organizations constitute a specialized but influential market segment driving fundamental advances in biomimetic interface technologies. Government funding for assistive technologies and defense applications provides additional market momentum, particularly for applications requiring precise control and natural user interaction capabilities.
Market adoption faces challenges including cost considerations, technical complexity, and regulatory requirements, particularly in medical applications. However, advancing manufacturing techniques and increasing component standardization are gradually addressing these barriers, expanding market accessibility across diverse application domains.
Current State and Control Challenges in Biomimetic Actuators
Biomimetic actuators represent a rapidly evolving field that draws inspiration from biological systems to create responsive mechanisms for interactive interfaces. Current implementations primarily focus on muscle-inspired actuators, including pneumatic artificial muscles, shape memory alloys, and electroactive polymers. These systems attempt to replicate the smooth, adaptive motion characteristics observed in natural organisms, offering significant advantages over traditional rigid actuators in human-computer interaction applications.
The technological landscape is dominated by several key actuator types, each with distinct operational principles and performance characteristics. Pneumatic artificial muscles utilize compressed air to generate contractile forces, mimicking skeletal muscle behavior through flexible bladder systems. Shape memory alloy actuators leverage temperature-induced phase transitions to produce controlled deformation, while electroactive polymers respond to electrical stimulation with dimensional changes that closely resemble biological tissue mechanics.
Despite significant advances, biomimetic actuators face substantial control challenges that limit their widespread adoption in interactive interfaces. Response time inconsistencies represent a primary obstacle, as biological-inspired systems often exhibit slower activation speeds compared to conventional electromagnetic actuators. The inherent nonlinear behavior of these materials creates complex control dynamics that require sophisticated feedback mechanisms and adaptive control algorithms to achieve precise positioning and force regulation.
Hysteresis effects pose another critical challenge, particularly in shape memory alloy and electroactive polymer systems. These materials demonstrate path-dependent behavior where the actuator response varies based on previous activation states, making predictable control extremely difficult. Temperature sensitivity further complicates control strategies, as environmental conditions significantly influence actuator performance and require real-time compensation mechanisms.
Power consumption and efficiency concerns also constrain practical implementation. Many biomimetic actuators require continuous energy input to maintain specific states, unlike biological muscles that can sustain positions with minimal metabolic cost. This limitation becomes particularly problematic in portable interactive devices where battery life is crucial.
Manufacturing consistency and material degradation represent additional technical barriers. Current production methods struggle to achieve uniform material properties across actuator batches, leading to unpredictable performance variations. Long-term reliability remains questionable as repeated activation cycles can cause material fatigue and performance degradation, especially in electroactive polymers exposed to electrical stress.
Integration complexity with existing control systems creates implementation challenges for interactive interface designers. The specialized drive electronics, sensor feedback systems, and control algorithms required for biomimetic actuators often exceed the complexity of traditional actuator solutions, increasing development costs and system maintenance requirements while potentially reducing overall system reliability.
The technological landscape is dominated by several key actuator types, each with distinct operational principles and performance characteristics. Pneumatic artificial muscles utilize compressed air to generate contractile forces, mimicking skeletal muscle behavior through flexible bladder systems. Shape memory alloy actuators leverage temperature-induced phase transitions to produce controlled deformation, while electroactive polymers respond to electrical stimulation with dimensional changes that closely resemble biological tissue mechanics.
Despite significant advances, biomimetic actuators face substantial control challenges that limit their widespread adoption in interactive interfaces. Response time inconsistencies represent a primary obstacle, as biological-inspired systems often exhibit slower activation speeds compared to conventional electromagnetic actuators. The inherent nonlinear behavior of these materials creates complex control dynamics that require sophisticated feedback mechanisms and adaptive control algorithms to achieve precise positioning and force regulation.
Hysteresis effects pose another critical challenge, particularly in shape memory alloy and electroactive polymer systems. These materials demonstrate path-dependent behavior where the actuator response varies based on previous activation states, making predictable control extremely difficult. Temperature sensitivity further complicates control strategies, as environmental conditions significantly influence actuator performance and require real-time compensation mechanisms.
Power consumption and efficiency concerns also constrain practical implementation. Many biomimetic actuators require continuous energy input to maintain specific states, unlike biological muscles that can sustain positions with minimal metabolic cost. This limitation becomes particularly problematic in portable interactive devices where battery life is crucial.
Manufacturing consistency and material degradation represent additional technical barriers. Current production methods struggle to achieve uniform material properties across actuator batches, leading to unpredictable performance variations. Long-term reliability remains questionable as repeated activation cycles can cause material fatigue and performance degradation, especially in electroactive polymers exposed to electrical stress.
Integration complexity with existing control systems creates implementation challenges for interactive interface designers. The specialized drive electronics, sensor feedback systems, and control algorithms required for biomimetic actuators often exceed the complexity of traditional actuator solutions, increasing development costs and system maintenance requirements while potentially reducing overall system reliability.
Existing Control Solutions for Interactive Biomimetic Systems
01 Neural network-based control systems for biomimetic actuators
Control systems utilizing neural networks and machine learning algorithms can be implemented to manage biomimetic actuators. These systems can process sensory feedback and adapt actuation patterns in real-time, mimicking biological motor control. The neural network approach enables the actuators to learn and optimize their performance through training, improving precision and responsiveness in various applications such as prosthetics and robotics.- Neural network-based control systems for biomimetic actuators: Control systems utilizing neural networks and machine learning algorithms can be implemented to manage biomimetic actuators. These systems can process sensory feedback and adapt actuation patterns in real-time, mimicking biological motor control. The neural network approach enables the actuators to learn and optimize their performance based on environmental conditions and task requirements, providing more natural and efficient movement control.
- Feedback control mechanisms using sensors: Integration of various sensors with biomimetic actuators enables closed-loop feedback control systems. These sensors can monitor position, force, pressure, and other parameters to provide real-time data for precise control. The feedback mechanisms allow the actuators to adjust their output dynamically, ensuring accurate and stable operation while mimicking biological systems' responsive behavior.
- Distributed control architecture for multi-actuator systems: Distributed control architectures can coordinate multiple biomimetic actuators working together in complex systems. This approach allows for decentralized decision-making and parallel processing, similar to biological systems where multiple muscles work in coordination. The distributed control enables scalability, fault tolerance, and more efficient management of complex biomimetic robotic systems with numerous degrees of freedom.
- Adaptive control algorithms for variable conditions: Adaptive control algorithms enable biomimetic actuators to adjust their behavior based on changing environmental conditions and operational requirements. These algorithms can modify control parameters in response to variations in load, temperature, or other factors, maintaining optimal performance. The adaptive approach allows the actuators to handle uncertainties and disturbances while maintaining stability and precision in diverse operating scenarios.
- Biomechanical modeling for control optimization: Control systems based on biomechanical models can optimize the performance of biomimetic actuators by incorporating principles from biological systems. These models simulate muscle dynamics, joint mechanics, and movement patterns to generate control signals that closely replicate natural motion. By leveraging biomechanical insights, the control systems can achieve more efficient energy usage and more lifelike actuation characteristics.
02 Feedback control mechanisms using sensors
Integration of various sensors including force sensors, position sensors, and pressure sensors enables closed-loop feedback control for biomimetic actuators. These sensing mechanisms provide real-time data about the actuator's state and environment, allowing for precise adjustments to actuation commands. The feedback control approach enhances stability, accuracy, and adaptability of the biomimetic system, particularly in dynamic environments.Expand Specific Solutions03 Electroactive polymer-based actuation control
Control methods specifically designed for electroactive polymer actuators involve managing electrical stimulation parameters such as voltage, current, and frequency. These control strategies account for the unique properties of electroactive materials that change shape or size when electrically stimulated. The control systems can modulate the electrical input to achieve desired mechanical outputs, enabling smooth and efficient biomimetic motion.Expand Specific Solutions04 Multi-actuator coordination and synchronization
Control architectures for coordinating multiple biomimetic actuators working in concert to achieve complex movements. These systems manage the timing, sequencing, and force distribution among multiple actuators to replicate natural biological motion patterns. The coordination control enables sophisticated behaviors such as grasping, walking, or swimming by synchronizing individual actuator outputs into coherent system-level movements.Expand Specific Solutions05 Adaptive control algorithms for variable conditions
Adaptive control strategies that automatically adjust control parameters based on changing environmental conditions or system states. These algorithms can compensate for wear, fatigue, temperature variations, and external disturbances affecting actuator performance. The adaptive approach ensures consistent biomimetic behavior across different operating conditions and extends the functional lifespan of the actuator system.Expand Specific Solutions
Key Players in Biomimetic Actuator and Interface Industry
The biomimetic actuators in interactive interfaces field represents an emerging technology sector currently in its early development stage, characterized by significant research activity but limited commercial deployment. The market remains relatively small with substantial growth potential as applications span gaming, healthcare, consumer electronics, and industrial automation. Technology maturity varies considerably across different implementation approaches, with established players like Apple, Sony Group Corp., and Texas Instruments Incorporated leveraging their hardware expertise, while specialized companies such as Immersion Corp., Wearable Devices Ltd., and Coapt LLC focus on haptic feedback and neural interface solutions. Research institutions including University of California, City University of Hong Kong, and Commissariat à l'énergie atomique contribute fundamental advances in biomimetic control systems. The competitive landscape shows a convergence of traditional electronics manufacturers, emerging haptic technology specialists, and academic research centers, indicating the technology's transition from laboratory concepts toward practical applications in next-generation interactive systems.
Immersion Corp.
Technical Solution: Immersion Corporation specializes in haptic feedback technology that creates tactile sensations in interactive interfaces. Their biomimetic actuator solutions utilize advanced force feedback algorithms and piezoelectric actuators to simulate natural touch sensations. The company's TouchSense technology platform integrates multiple actuator types including linear resonant actuators (LRAs) and eccentric rotating mass (ERM) motors to create realistic haptic experiences. Their control systems employ machine learning algorithms to adapt haptic responses based on user interaction patterns, enabling more intuitive and natural interface experiences. The technology supports multi-modal feedback combining tactile, kinesthetic, and thermal sensations to create comprehensive biomimetic responses in gaming, mobile devices, and automotive applications.
Strengths: Industry-leading haptic technology with extensive patent portfolio and proven commercial applications. Weaknesses: Limited to surface-level tactile feedback, lacks deep tissue or complex biomimetic movement capabilities.
Apple, Inc.
Technical Solution: Apple has developed advanced biomimetic actuator systems integrated into their interactive interfaces, particularly through the Taptic Engine technology. Their linear actuator design mimics natural tactile sensations by generating precise haptic feedback that simulates physical button presses, texture variations, and environmental interactions. The system utilizes electromagnetic actuators with sophisticated control algorithms that can produce over 1000 distinct haptic patterns. Apple's biomimetic approach focuses on creating intuitive user experiences by replicating familiar physical sensations in digital interfaces. Their control study methodology involves extensive user testing to optimize actuator response timing, amplitude, and frequency characteristics to match human tactile perception patterns. The technology is implemented across multiple product lines including smartphones, tablets, and wearables.
Strengths: Seamless integration with consumer devices and refined user experience optimization through extensive testing. Weaknesses: Proprietary ecosystem limits broader application and relatively simple actuator mechanisms compared to advanced biomimetic systems.
Core Control Innovations in Biomimetic Actuator Patents
Biomimetic actuation device and system, and methods for controlling a biomimetic actuation device and system
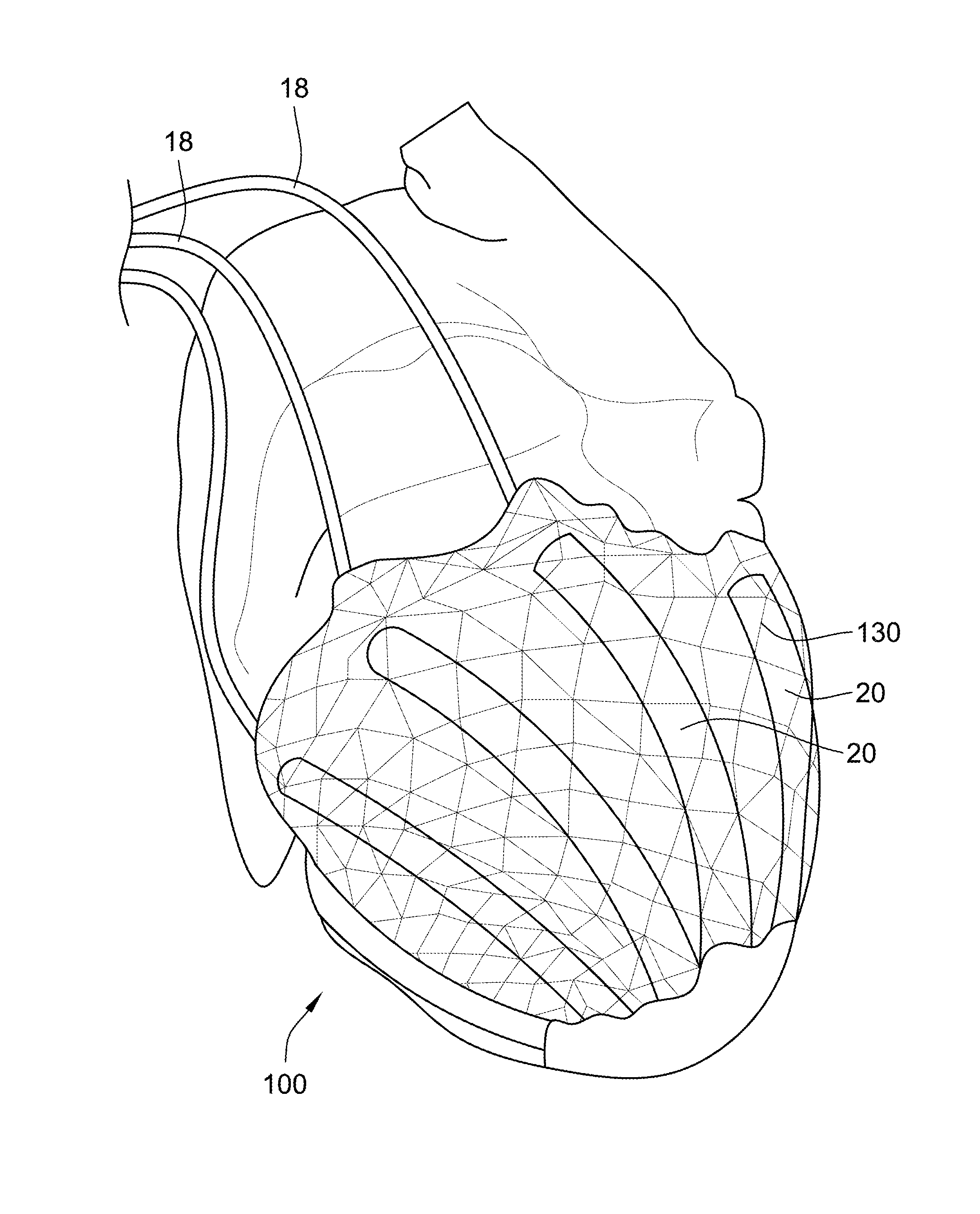
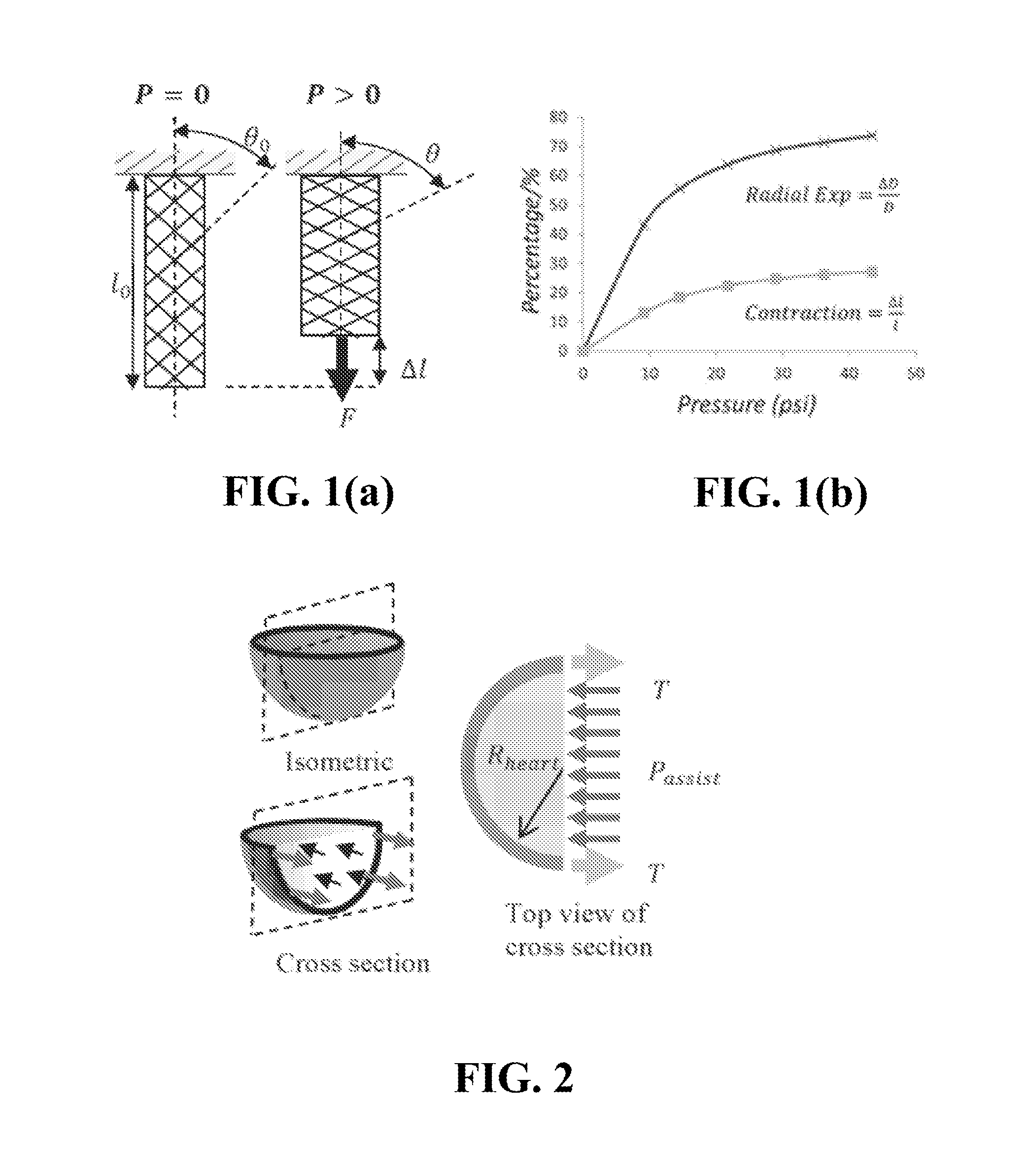
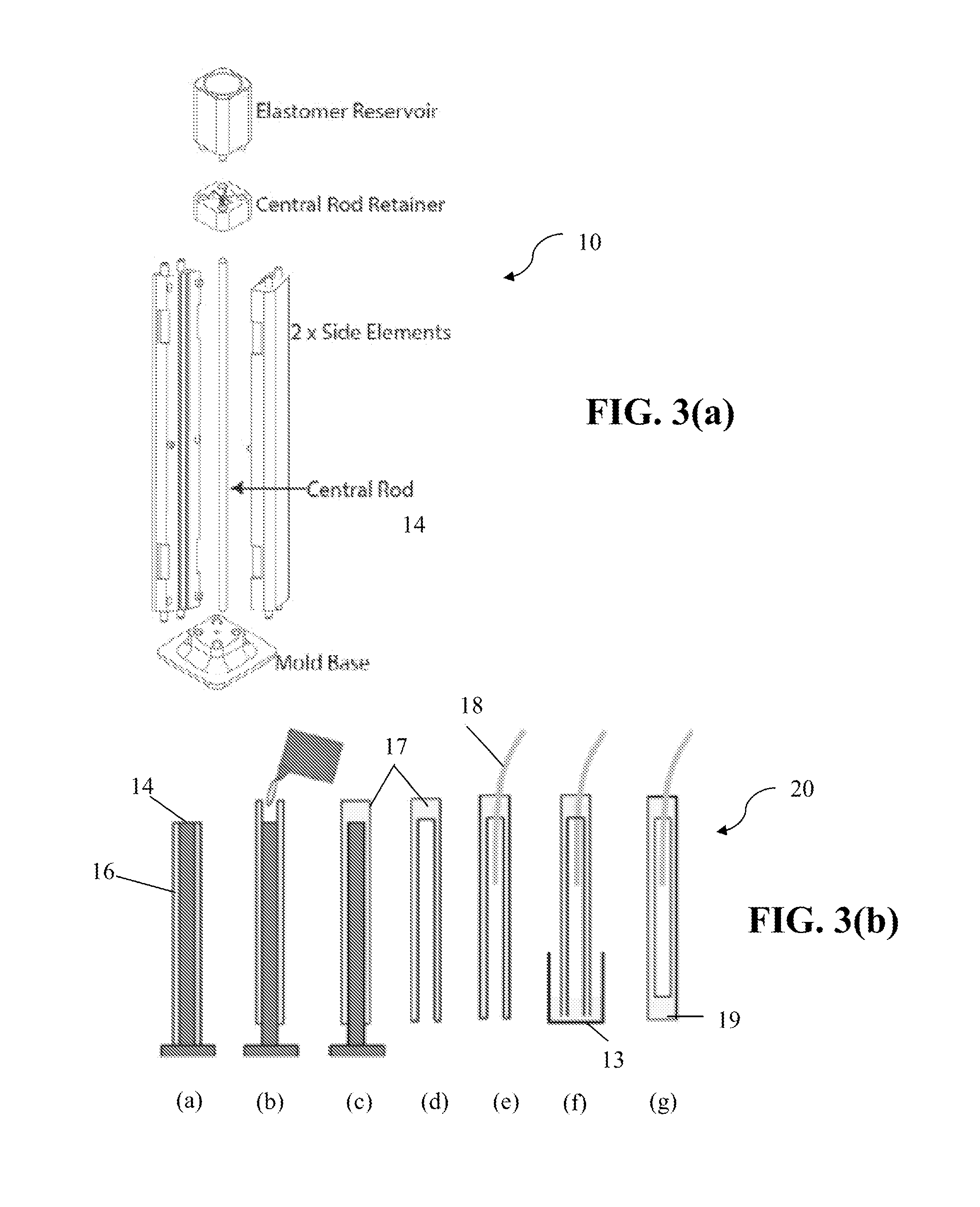
PatentActiveUS20160346449A1
Innovation
- Development of biomimetic DCC devices using soft pneumatic artificial muscles (PAMs) with low threshold pressures and soft ends, oriented in a helical and circumferential fashion to replicate cardiac motion, providing synchronized mechanical assistance during both systolic and diastolic phases without contacting blood, thus reducing the need for anticoagulation and minimizing trauma.

Control logic for biomimetic joint actuators
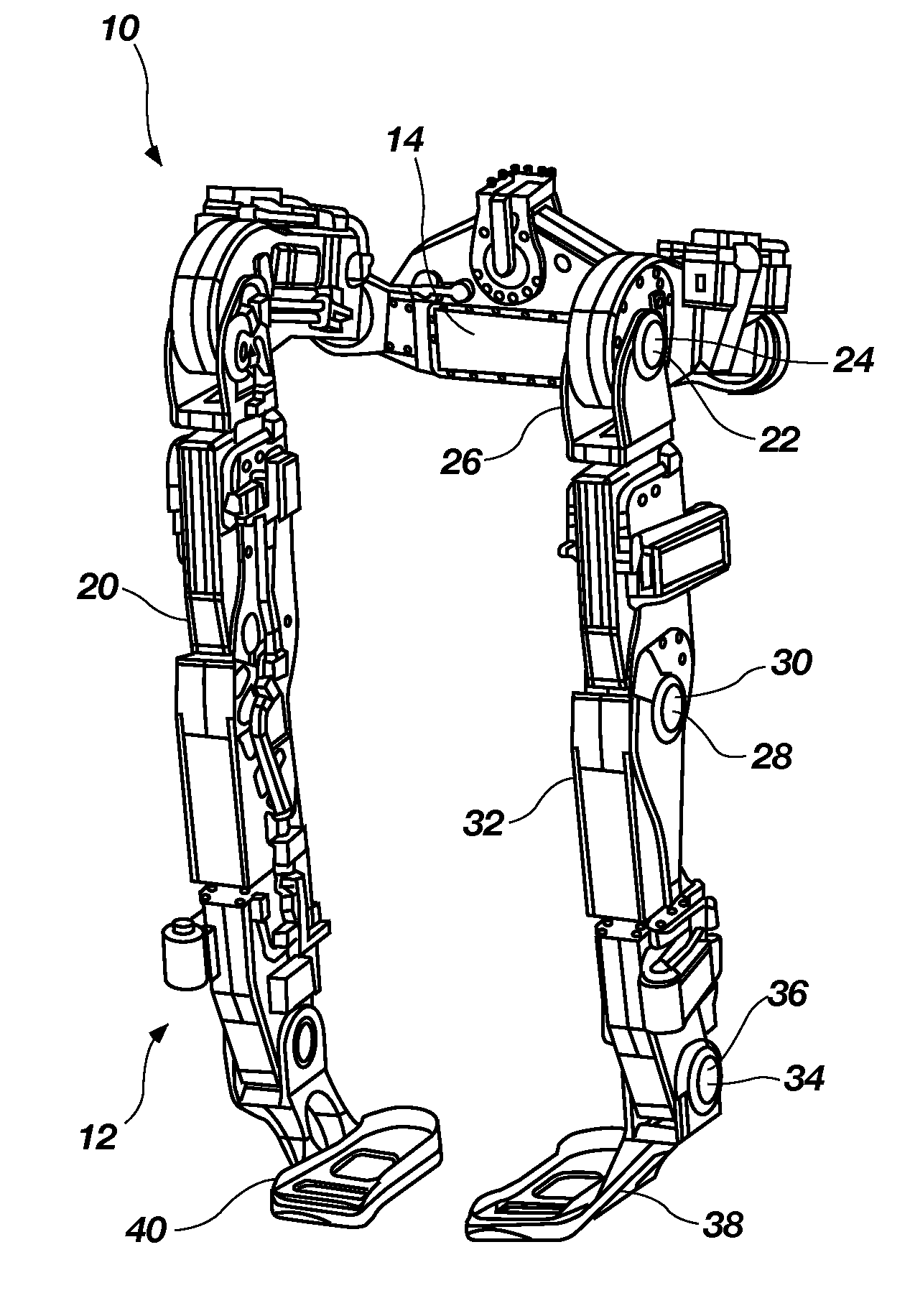
PatentInactiveUS8731716B2
Innovation
- A biomimetic mechanical joint system utilizing multiple fractional actuators that can be selectively recruited and throttled to efficiently rotate a support member about a pivot device, mimicking the human body's muscle configuration, allowing for efficient movement across a range of conditions without sacrificing speed or power.

Safety Standards for Biomimetic Interactive Devices
The development of safety standards for biomimetic interactive devices represents a critical regulatory frontier as these technologies transition from laboratory prototypes to commercial applications. Current safety frameworks primarily draw from existing standards in robotics, medical devices, and consumer electronics, yet the unique characteristics of biomimetic actuators necessitate specialized safety considerations that address their biological-inspired behaviors and human interaction modalities.
Mechanical safety standards focus on force limitation and fail-safe mechanisms inherent to biomimetic actuators. Unlike traditional rigid actuators, biomimetic systems often employ soft materials and compliant structures that require dynamic force monitoring. Standards mandate maximum force thresholds based on contact area and interaction duration, with particular attention to vulnerable body regions. Emergency stop protocols must account for the gradual response characteristics of biological-inspired materials, requiring predictive safety algorithms rather than instantaneous cutoff mechanisms.
Biocompatibility requirements extend beyond traditional material safety to encompass prolonged skin contact scenarios. Standards specify acceptable materials for direct human interface, including hypoallergenic polymers and antimicrobial surface treatments. Particular emphasis is placed on devices intended for extended wear or therapeutic applications, where skin sensitization and allergic reactions pose significant risks. Testing protocols require comprehensive dermatological evaluation under various environmental conditions and user demographics.
Electrical safety standards address the unique challenges posed by biomimetic actuators' distributed sensing and actuation networks. Unlike centralized motor systems, biomimetic devices often incorporate numerous small actuators and sensors throughout the interface structure. Standards mandate isolation requirements for each actuator unit, redundant grounding systems, and protection against moisture ingress that could compromise electrical safety during normal use.
Cybersecurity frameworks specifically address the vulnerability of biomimetic interactive devices to malicious interference. Given their intimate human interaction capabilities, these devices present unique attack vectors where compromised control systems could cause physical harm. Standards require encrypted communication protocols, secure authentication mechanisms, and fail-safe behaviors when communication integrity is compromised. Regular security auditing and update mechanisms are mandated to address emerging threats.
Performance reliability standards establish minimum operational parameters for biomimetic actuators in safety-critical applications. These include response time consistency, force accuracy maintenance over extended operation periods, and graceful degradation protocols when component failure occurs. Standards specify acceptable deviation ranges for biomimetic behavior patterns and require comprehensive testing under various environmental conditions including temperature extremes, humidity variations, and electromagnetic interference scenarios.
Human factors safety considerations address the psychological and ergonomic aspects of biomimetic device interaction. Standards mandate user training requirements, clear operational boundaries communication, and intuitive emergency override mechanisms. Special attention is given to preventing uncanny valley effects that could cause user distress or inappropriate reliance on biomimetic behaviors that exceed actual device capabilities.
Mechanical safety standards focus on force limitation and fail-safe mechanisms inherent to biomimetic actuators. Unlike traditional rigid actuators, biomimetic systems often employ soft materials and compliant structures that require dynamic force monitoring. Standards mandate maximum force thresholds based on contact area and interaction duration, with particular attention to vulnerable body regions. Emergency stop protocols must account for the gradual response characteristics of biological-inspired materials, requiring predictive safety algorithms rather than instantaneous cutoff mechanisms.
Biocompatibility requirements extend beyond traditional material safety to encompass prolonged skin contact scenarios. Standards specify acceptable materials for direct human interface, including hypoallergenic polymers and antimicrobial surface treatments. Particular emphasis is placed on devices intended for extended wear or therapeutic applications, where skin sensitization and allergic reactions pose significant risks. Testing protocols require comprehensive dermatological evaluation under various environmental conditions and user demographics.
Electrical safety standards address the unique challenges posed by biomimetic actuators' distributed sensing and actuation networks. Unlike centralized motor systems, biomimetic devices often incorporate numerous small actuators and sensors throughout the interface structure. Standards mandate isolation requirements for each actuator unit, redundant grounding systems, and protection against moisture ingress that could compromise electrical safety during normal use.
Cybersecurity frameworks specifically address the vulnerability of biomimetic interactive devices to malicious interference. Given their intimate human interaction capabilities, these devices present unique attack vectors where compromised control systems could cause physical harm. Standards require encrypted communication protocols, secure authentication mechanisms, and fail-safe behaviors when communication integrity is compromised. Regular security auditing and update mechanisms are mandated to address emerging threats.
Performance reliability standards establish minimum operational parameters for biomimetic actuators in safety-critical applications. These include response time consistency, force accuracy maintenance over extended operation periods, and graceful degradation protocols when component failure occurs. Standards specify acceptable deviation ranges for biomimetic behavior patterns and require comprehensive testing under various environmental conditions including temperature extremes, humidity variations, and electromagnetic interference scenarios.
Human factors safety considerations address the psychological and ergonomic aspects of biomimetic device interaction. Standards mandate user training requirements, clear operational boundaries communication, and intuitive emergency override mechanisms. Special attention is given to preventing uncanny valley effects that could cause user distress or inappropriate reliance on biomimetic behaviors that exceed actual device capabilities.
Human-Machine Interaction Ethics in Biomimetic Systems
The integration of biomimetic actuators into interactive interfaces raises profound ethical considerations that extend beyond traditional human-machine interaction paradigms. As these systems increasingly mimic biological behaviors and responses, they blur the boundaries between artificial and natural interactions, creating new ethical territories that require careful examination.
Privacy and data autonomy emerge as primary concerns when biomimetic systems collect and process biometric data to enhance interaction fidelity. These actuators often require continuous monitoring of user physiological responses, muscle movements, and behavioral patterns to achieve realistic biomimetic feedback. The granular nature of this data collection raises questions about user consent, data ownership, and the potential for surveillance overreach.
The psychological impact of biomimetic interfaces presents another critical ethical dimension. When actuators replicate natural sensations and responses with high fidelity, users may develop emotional attachments or dependencies on these artificial systems. This phenomenon becomes particularly concerning in vulnerable populations, including children, elderly users, or individuals with cognitive impairments who may struggle to distinguish between authentic biological interactions and artificial simulations.
Transparency and explainability constitute fundamental ethical requirements for biomimetic actuator systems. Users must understand when they are interacting with artificial biomimetic responses versus authentic biological feedback. The sophisticated nature of these systems can create deceptive experiences where users unknowingly form relationships with artificial entities, potentially leading to manipulation or emotional exploitation.
Accessibility and equity considerations demand attention as biomimetic actuator technologies advance. These sophisticated systems risk creating digital divides where only privileged populations access enhanced interactive experiences. Ethical deployment requires ensuring that biomimetic interfaces serve diverse user needs without perpetuating existing inequalities or creating new forms of technological discrimination.
The autonomy and agency of users within biomimetic systems require careful protection. As these interfaces become more responsive and adaptive, they may subtly influence user behavior through carefully crafted biomimetic feedback loops. Maintaining user agency while providing enhanced interactive experiences represents a delicate balance that demands ongoing ethical oversight and user empowerment mechanisms.
Privacy and data autonomy emerge as primary concerns when biomimetic systems collect and process biometric data to enhance interaction fidelity. These actuators often require continuous monitoring of user physiological responses, muscle movements, and behavioral patterns to achieve realistic biomimetic feedback. The granular nature of this data collection raises questions about user consent, data ownership, and the potential for surveillance overreach.
The psychological impact of biomimetic interfaces presents another critical ethical dimension. When actuators replicate natural sensations and responses with high fidelity, users may develop emotional attachments or dependencies on these artificial systems. This phenomenon becomes particularly concerning in vulnerable populations, including children, elderly users, or individuals with cognitive impairments who may struggle to distinguish between authentic biological interactions and artificial simulations.
Transparency and explainability constitute fundamental ethical requirements for biomimetic actuator systems. Users must understand when they are interacting with artificial biomimetic responses versus authentic biological feedback. The sophisticated nature of these systems can create deceptive experiences where users unknowingly form relationships with artificial entities, potentially leading to manipulation or emotional exploitation.
Accessibility and equity considerations demand attention as biomimetic actuator technologies advance. These sophisticated systems risk creating digital divides where only privileged populations access enhanced interactive experiences. Ethical deployment requires ensuring that biomimetic interfaces serve diverse user needs without perpetuating existing inequalities or creating new forms of technological discrimination.
The autonomy and agency of users within biomimetic systems require careful protection. As these interfaces become more responsive and adaptive, they may subtly influence user behavior through carefully crafted biomimetic feedback loops. Maintaining user agency while providing enhanced interactive experiences represents a delicate balance that demands ongoing ethical oversight and user empowerment mechanisms.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!