Optimize Biomimetic Actuator Designs for Fast Actuation
APR 20, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Biomimetic Actuator Development Background and Objectives
Biomimetic actuators represent a revolutionary approach to mechanical actuation systems, drawing inspiration from the sophisticated movement mechanisms found in biological organisms. The field emerged from the recognition that natural systems have evolved highly efficient, adaptive, and responsive actuation mechanisms over millions of years. From the rapid muscle contractions in cheetahs to the lightning-fast strike of mantis shrimp, nature provides countless examples of high-speed, precise actuation that far exceeds the performance of conventional mechanical systems.
The development of biomimetic actuators has evolved through several distinct phases since the 1990s. Initial research focused on understanding the fundamental principles underlying biological actuation, particularly muscle fiber mechanics and neural control systems. Early prototypes primarily replicated basic muscle-like contractions using shape memory alloys and pneumatic systems. The field gained significant momentum in the 2000s with advances in smart materials, including electroactive polymers, piezoelectric materials, and ionic polymer-metal composites.
Contemporary biomimetic actuator research has shifted toward achieving unprecedented actuation speeds while maintaining the inherent advantages of biological systems, such as energy efficiency, adaptability, and self-healing capabilities. The quest for fast actuation has become increasingly critical as applications demand real-time responsiveness in robotics, prosthetics, and autonomous systems. Current challenges include overcoming the traditional trade-offs between speed, force output, and energy consumption that plague conventional actuators.
The primary objective of optimizing biomimetic actuator designs for fast actuation centers on developing systems that can achieve millisecond-level response times while preserving the natural advantages of biological inspiration. This involves creating actuators capable of rapid state transitions, high-frequency operation, and instantaneous force generation. Key performance targets include achieving actuation speeds comparable to or exceeding biological benchmarks, such as the 0.3-millisecond strike time of trap-jaw ants or the sub-millisecond muscle activation in hummingbird flight.
Strategic goals encompass developing scalable manufacturing processes for high-speed biomimetic actuators, establishing standardized performance metrics for comparative evaluation, and creating integrated control systems that can harness the full potential of rapid actuation capabilities. The ultimate vision involves deploying these advanced actuators in next-generation applications requiring unprecedented speed and precision.
The development of biomimetic actuators has evolved through several distinct phases since the 1990s. Initial research focused on understanding the fundamental principles underlying biological actuation, particularly muscle fiber mechanics and neural control systems. Early prototypes primarily replicated basic muscle-like contractions using shape memory alloys and pneumatic systems. The field gained significant momentum in the 2000s with advances in smart materials, including electroactive polymers, piezoelectric materials, and ionic polymer-metal composites.
Contemporary biomimetic actuator research has shifted toward achieving unprecedented actuation speeds while maintaining the inherent advantages of biological systems, such as energy efficiency, adaptability, and self-healing capabilities. The quest for fast actuation has become increasingly critical as applications demand real-time responsiveness in robotics, prosthetics, and autonomous systems. Current challenges include overcoming the traditional trade-offs between speed, force output, and energy consumption that plague conventional actuators.
The primary objective of optimizing biomimetic actuator designs for fast actuation centers on developing systems that can achieve millisecond-level response times while preserving the natural advantages of biological inspiration. This involves creating actuators capable of rapid state transitions, high-frequency operation, and instantaneous force generation. Key performance targets include achieving actuation speeds comparable to or exceeding biological benchmarks, such as the 0.3-millisecond strike time of trap-jaw ants or the sub-millisecond muscle activation in hummingbird flight.
Strategic goals encompass developing scalable manufacturing processes for high-speed biomimetic actuators, establishing standardized performance metrics for comparative evaluation, and creating integrated control systems that can harness the full potential of rapid actuation capabilities. The ultimate vision involves deploying these advanced actuators in next-generation applications requiring unprecedented speed and precision.
Market Demand for High-Speed Biomimetic Actuation Systems
The global market for high-speed biomimetic actuation systems is experiencing unprecedented growth driven by diverse industrial applications requiring rapid, precise, and energy-efficient motion control. Traditional electromagnetic and pneumatic actuators face limitations in speed, power consumption, and adaptability, creating substantial demand for biomimetic alternatives that replicate the efficiency of natural muscle systems.
Robotics represents the largest market segment, where applications demand actuators capable of achieving millisecond response times while maintaining high force output. Humanoid robots, prosthetic devices, and surgical robots require actuators that can mimic human muscle performance, particularly in applications involving delicate manipulation tasks or real-time adaptive responses. The increasing adoption of collaborative robots in manufacturing environments further amplifies this demand.
Aerospace and defense sectors present significant opportunities for high-speed biomimetic actuators, particularly in unmanned aerial vehicles and adaptive wing systems. These applications require lightweight actuators with rapid deployment capabilities for flight control surfaces, where traditional hydraulic systems prove too heavy and slow. Military applications increasingly seek actuators for exoskeletons and autonomous systems that must operate in dynamic environments.
The automotive industry drives substantial demand through electric vehicle development and autonomous driving systems. High-speed actuators are essential for active suspension systems, adaptive aerodynamics, and safety mechanisms requiring instantaneous response. Advanced driver assistance systems rely on rapid actuator deployment for collision avoidance and stability control.
Medical device markets show accelerating adoption of biomimetic actuators for surgical instruments, rehabilitation equipment, and implantable devices. Minimally invasive surgical procedures require actuators with precise control and rapid response capabilities, while rehabilitation robotics demands systems that can adapt to patient movement patterns in real-time.
Manufacturing automation increasingly requires actuators that can handle high-frequency operations while maintaining precision. Pick-and-place operations, quality inspection systems, and adaptive manufacturing processes benefit from actuators that combine speed with intelligent feedback mechanisms. The trend toward flexible manufacturing systems creates additional demand for rapidly reconfigurable actuation solutions.
Consumer electronics and haptic feedback systems represent emerging market segments where miniaturized high-speed actuators enable enhanced user experiences. Virtual reality systems, gaming peripherals, and mobile devices increasingly incorporate sophisticated haptic feedback requiring rapid, precise actuation at small scales.
Market growth is further accelerated by increasing emphasis on energy efficiency and sustainability. Biomimetic actuators offer superior power-to-weight ratios and energy conversion efficiency compared to conventional systems, aligning with global initiatives toward reduced energy consumption and environmental impact across industrial sectors.
Robotics represents the largest market segment, where applications demand actuators capable of achieving millisecond response times while maintaining high force output. Humanoid robots, prosthetic devices, and surgical robots require actuators that can mimic human muscle performance, particularly in applications involving delicate manipulation tasks or real-time adaptive responses. The increasing adoption of collaborative robots in manufacturing environments further amplifies this demand.
Aerospace and defense sectors present significant opportunities for high-speed biomimetic actuators, particularly in unmanned aerial vehicles and adaptive wing systems. These applications require lightweight actuators with rapid deployment capabilities for flight control surfaces, where traditional hydraulic systems prove too heavy and slow. Military applications increasingly seek actuators for exoskeletons and autonomous systems that must operate in dynamic environments.
The automotive industry drives substantial demand through electric vehicle development and autonomous driving systems. High-speed actuators are essential for active suspension systems, adaptive aerodynamics, and safety mechanisms requiring instantaneous response. Advanced driver assistance systems rely on rapid actuator deployment for collision avoidance and stability control.
Medical device markets show accelerating adoption of biomimetic actuators for surgical instruments, rehabilitation equipment, and implantable devices. Minimally invasive surgical procedures require actuators with precise control and rapid response capabilities, while rehabilitation robotics demands systems that can adapt to patient movement patterns in real-time.
Manufacturing automation increasingly requires actuators that can handle high-frequency operations while maintaining precision. Pick-and-place operations, quality inspection systems, and adaptive manufacturing processes benefit from actuators that combine speed with intelligent feedback mechanisms. The trend toward flexible manufacturing systems creates additional demand for rapidly reconfigurable actuation solutions.
Consumer electronics and haptic feedback systems represent emerging market segments where miniaturized high-speed actuators enable enhanced user experiences. Virtual reality systems, gaming peripherals, and mobile devices increasingly incorporate sophisticated haptic feedback requiring rapid, precise actuation at small scales.
Market growth is further accelerated by increasing emphasis on energy efficiency and sustainability. Biomimetic actuators offer superior power-to-weight ratios and energy conversion efficiency compared to conventional systems, aligning with global initiatives toward reduced energy consumption and environmental impact across industrial sectors.
Current State and Speed Limitations of Biomimetic Actuators
Biomimetic actuators represent a rapidly evolving field that draws inspiration from natural biological systems to create artificial motion mechanisms. Currently, the technology encompasses several primary categories including electroactive polymers, shape memory alloys, pneumatic artificial muscles, and ionic polymer-metal composites. These actuators demonstrate remarkable capabilities in mimicking natural movements, offering advantages such as silent operation, compliance, and energy efficiency compared to traditional rigid actuators.
The predominant challenge facing biomimetic actuators lies in their inherently slow response characteristics. Most electroactive polymer actuators operate within frequency ranges of 0.1 to 10 Hz, significantly slower than conventional electromagnetic motors that can achieve thousands of revolutions per minute. This limitation stems from fundamental physical constraints including ion diffusion rates in ionic actuators, thermal cycling requirements in shape memory alloys, and fluid dynamics in pneumatic systems.
Electroactive polymers, while offering excellent biocompatibility and flexibility, suffer from low actuation speeds due to charge transport limitations across polymer matrices. The migration of ions through polymer networks creates bottlenecks that restrict rapid dimensional changes. Similarly, dielectric elastomer actuators, despite their high energy density potential, face constraints from viscoelastic material properties that limit their dynamic response capabilities.
Shape memory alloy actuators encounter thermal management challenges that directly impact their speed performance. The heating and cooling cycles required for phase transitions typically require several seconds, making them unsuitable for high-frequency applications. Heat dissipation becomes a critical limiting factor, particularly in miniaturized systems where surface area to volume ratios affect thermal dynamics.
Pneumatic artificial muscles demonstrate superior force generation capabilities but are constrained by compressibility effects and flow resistance in supply lines. The time required for pressure buildup and release creates inherent delays in actuation response. Additionally, the need for external pressure sources adds complexity to system integration and limits portability.
Recent developments have shown promising improvements through hybrid approaches and advanced materials. Researchers have achieved response times in the millisecond range using carbon nanotube-enhanced polymers and optimized electrode configurations. However, these improvements often come at the cost of other performance parameters such as stroke length, force output, or operational lifetime, highlighting the complex trade-offs inherent in current biomimetic actuator technologies.
The predominant challenge facing biomimetic actuators lies in their inherently slow response characteristics. Most electroactive polymer actuators operate within frequency ranges of 0.1 to 10 Hz, significantly slower than conventional electromagnetic motors that can achieve thousands of revolutions per minute. This limitation stems from fundamental physical constraints including ion diffusion rates in ionic actuators, thermal cycling requirements in shape memory alloys, and fluid dynamics in pneumatic systems.
Electroactive polymers, while offering excellent biocompatibility and flexibility, suffer from low actuation speeds due to charge transport limitations across polymer matrices. The migration of ions through polymer networks creates bottlenecks that restrict rapid dimensional changes. Similarly, dielectric elastomer actuators, despite their high energy density potential, face constraints from viscoelastic material properties that limit their dynamic response capabilities.
Shape memory alloy actuators encounter thermal management challenges that directly impact their speed performance. The heating and cooling cycles required for phase transitions typically require several seconds, making them unsuitable for high-frequency applications. Heat dissipation becomes a critical limiting factor, particularly in miniaturized systems where surface area to volume ratios affect thermal dynamics.
Pneumatic artificial muscles demonstrate superior force generation capabilities but are constrained by compressibility effects and flow resistance in supply lines. The time required for pressure buildup and release creates inherent delays in actuation response. Additionally, the need for external pressure sources adds complexity to system integration and limits portability.
Recent developments have shown promising improvements through hybrid approaches and advanced materials. Researchers have achieved response times in the millisecond range using carbon nanotube-enhanced polymers and optimized electrode configurations. However, these improvements often come at the cost of other performance parameters such as stroke length, force output, or operational lifetime, highlighting the complex trade-offs inherent in current biomimetic actuator technologies.
Existing Fast Actuation Solutions in Biomimetic Systems
01 Material composition for enhanced actuation speed
Biomimetic actuators can achieve improved actuation speed through the selection and optimization of specific materials. Smart materials such as shape memory alloys, electroactive polymers, and piezoelectric materials enable rapid response times. The molecular structure and composition of these materials directly influence the speed at which the actuator can change shape or position. Material properties including elasticity, conductivity, and phase transition characteristics are critical factors in determining actuation velocity.- Material composition optimization for enhanced actuation speed: Biomimetic actuators can achieve improved actuation speed through careful selection and optimization of active materials. This includes the use of shape memory alloys, electroactive polymers, and composite materials that exhibit rapid response characteristics. The material properties such as elasticity, conductivity, and molecular structure are engineered to minimize response time and maximize actuation frequency. Advanced material processing techniques enable the creation of actuators with tailored microstructures that facilitate faster mechanical transitions.
- Electrical stimulation and control mechanisms: The actuation speed of biomimetic actuators can be significantly enhanced through optimized electrical stimulation methods and control systems. This involves the implementation of precise voltage control, current modulation, and frequency tuning to achieve rapid activation and deactivation cycles. Advanced control algorithms and feedback mechanisms enable real-time adjustment of electrical parameters to maximize response speed while maintaining stability and repeatability of the actuator performance.
- Structural design and geometric configuration: The physical architecture and geometric design of biomimetic actuators play a crucial role in determining actuation speed. This includes optimization of actuator dimensions, layer thickness, surface area ratios, and mechanical coupling arrangements. Innovative structural configurations such as multi-layered designs, helical arrangements, and segmented architectures enable faster energy transfer and mechanical response. The integration of flexible joints and optimized load distribution mechanisms further contributes to enhanced actuation velocity.
- Thermal management and energy efficiency: Effective thermal management strategies are essential for improving the actuation speed of biomimetic actuators, particularly those based on thermal activation principles. This involves the implementation of efficient heat transfer mechanisms, thermal insulation designs, and rapid cooling systems. Energy-efficient heating methods and optimized thermal cycling protocols enable faster temperature transitions, thereby reducing actuation time. The integration of heat dissipation structures and temperature monitoring systems ensures consistent high-speed performance.
- Hybrid actuation systems and multi-modal approaches: Combining multiple actuation mechanisms in hybrid systems can significantly enhance overall actuation speed and performance. This approach integrates different actuation principles such as pneumatic, hydraulic, electrical, and chemical methods to leverage the advantages of each mechanism. Multi-modal actuation strategies enable rapid initial response through one mechanism while maintaining sustained performance through another. The synergistic combination of actuation modes allows for optimized speed-force trade-offs and adaptive performance across varying operational conditions.
02 Structural design optimization for rapid actuation
The geometric configuration and structural architecture of biomimetic actuators significantly impact actuation speed. Designs incorporating thin-film structures, layered configurations, or micro-scale architectures can reduce inertia and enable faster response times. Biomimetic structures inspired by natural systems such as muscle fibers or plant movements provide templates for achieving high-speed actuation. Optimization of aspect ratios, thickness parameters, and mechanical coupling mechanisms contributes to enhanced actuation velocity.Expand Specific Solutions03 Control systems and signal processing for actuation speed
Advanced control algorithms and signal processing techniques play a crucial role in maximizing biomimetic actuator speed. Real-time feedback systems, predictive control methods, and optimized voltage or current waveforms can significantly reduce response latency. Integration of sensors and closed-loop control enables dynamic adjustment of actuation parameters. Digital signal processing and microcontroller-based systems facilitate rapid command execution and minimize delays in the actuation cycle.Expand Specific Solutions04 Energy delivery and power management for fast actuation
The method and efficiency of energy delivery directly affects the actuation speed of biomimetic systems. Optimized power supply configurations, including capacitive discharge systems and high-frequency power sources, enable rapid energy transfer to the actuator. Thermal management strategies prevent performance degradation during high-speed operation. Energy storage mechanisms and power amplification circuits support the instantaneous power demands required for fast actuation cycles.Expand Specific Solutions05 Hybrid actuation mechanisms for speed enhancement
Combining multiple actuation principles in hybrid configurations can achieve superior speed performance compared to single-mode systems. Integration of electromagnetic, pneumatic, hydraulic, or thermal actuation methods allows leveraging the advantages of each mechanism. Multi-modal actuation systems can switch between different operating modes to optimize speed for specific tasks. Synergistic coupling of actuation mechanisms enables rapid initial response followed by sustained motion or force generation.Expand Specific Solutions
Key Players in Biomimetic Actuator and Robotics Industry
The biomimetic actuator optimization field represents an emerging technology sector in its early development stage, characterized by significant research activity but limited commercial maturity. The market remains nascent with substantial growth potential as applications span from medical devices to robotics and aerospace systems. Technology maturity varies considerably across the competitive landscape, with leading research institutions like Harvard College, Duke University, and Jilin University driving fundamental innovations in bio-inspired actuation mechanisms. Industrial players including Moog Inc., Intel Corp., and Thales SA are advancing practical implementations, while specialized companies like VisCardia Inc. focus on medical applications. The sector demonstrates a hybrid ecosystem where academic research from institutions such as Huazhong University of Science & Technology and Agency for Science, Technology & Research collaborates with established technology companies like Apple Inc. and emerging specialists, indicating a technology transition phase from laboratory concepts toward commercial viability with significant optimization challenges remaining in speed, efficiency, and scalability.
President & Fellows of Harvard College
Technical Solution: Harvard has developed advanced soft robotics actuators inspired by biological systems, particularly focusing on pneumatic and hydraulic actuators that mimic muscle contractions. Their research includes electroactive polymer (EAP) actuators and shape memory alloy (SMA) based systems that can achieve rapid response times under 100 milliseconds. The university's Wyss Institute has pioneered multi-material 3D printing techniques for creating complex actuator geometries that optimize force-to-weight ratios while maintaining fast actuation speeds through innovative material compositions and structural designs.
Strengths: Leading research institution with cutting-edge fabrication capabilities and strong theoretical foundation. Weaknesses: Limited commercial scalability and high manufacturing costs for complex designs.
Moog, Inc.
Technical Solution: Moog specializes in high-performance electrohydraulic and electromechanical actuators for aerospace and industrial applications. Their biomimetic approach incorporates adaptive control algorithms that mimic neural feedback systems, enabling actuators to achieve response times as fast as 10 milliseconds with precise force control. The company's ServoActuator technology combines advanced materials like carbon fiber composites with optimized valve designs and smart control systems to deliver rapid actuation while maintaining durability and reliability in demanding environments.
Strengths: Proven commercial track record with robust industrial-grade solutions and excellent reliability. Weaknesses: Higher cost compared to conventional actuators and complex maintenance requirements.
Core Patents in High-Speed Biomimetic Actuator Design
Mechano-sensitive actuator array
PatentInactiveNZ574809B
Innovation
- A biomimetic actuator array using mechano-sensitive dielectric elastomer minimum energy structures (DEMES) units that self-sense deformation to propagate actuation through the array, allowing for sequential actuation and efficient propulsion by overlapping stroke paths of adjacent actuators, with capacitive or resistive sensing triggering actuation.




Biomimetic actuation device and system, and methods for controlling a biomimetic actuation device and system
PatentActiveUS10058647B2
Innovation
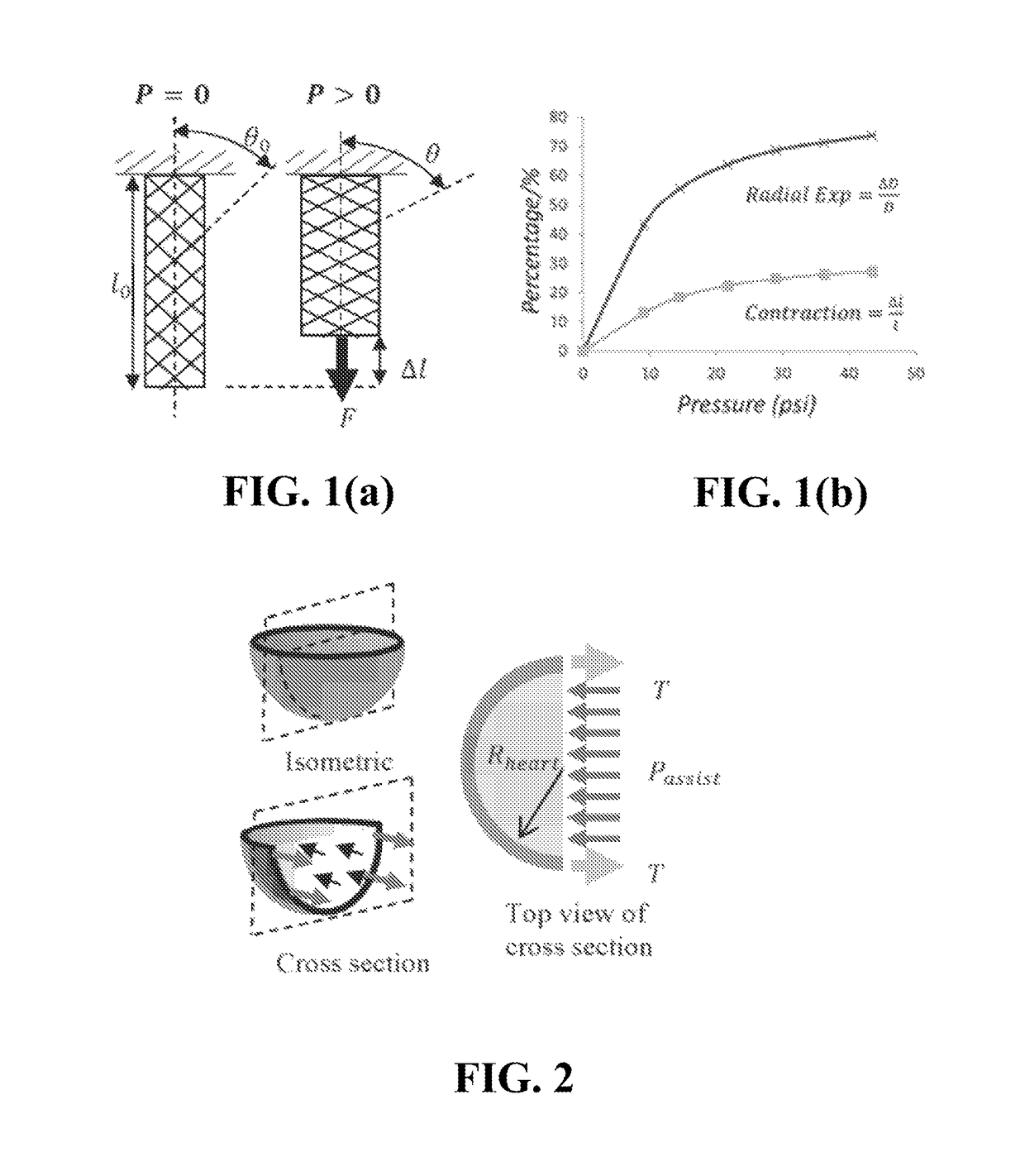
- Development of soft pneumatic artificial muscles (PAMs) with low threshold pressures and soft ends, oriented in a helical and circumferential fashion to replicate cardiac motion, providing synchronized mechanical assistance and avoiding blood contact, thus reducing thromboembolic risks.

Material Science Advances for Actuator Optimization
Material science innovations have emerged as the primary catalyst for achieving breakthrough performance in biomimetic actuators designed for rapid response applications. The development of novel smart materials with enhanced electromechanical properties has fundamentally transformed the actuator landscape, enabling unprecedented speed and efficiency in bio-inspired systems.
Shape memory alloys represent a significant advancement in actuator materials, with recent developments in nickel-titanium compositions achieving response times under 10 milliseconds. These alloys demonstrate remarkable strain recovery rates exceeding 8% while maintaining structural integrity across millions of actuation cycles. Advanced heat treatment processes and microstructural engineering have optimized the martensitic transformation temperatures, enabling precise control over activation thresholds and response characteristics.
Electroactive polymers have revolutionized soft actuator design through their ability to generate large deformations under relatively low electrical stimulation. Dielectric elastomers, particularly those incorporating high-permittivity nanofillers such as barium titanate and carbon nanotubes, exhibit strain rates approaching 1000% per second. Recent breakthroughs in polymer chain architecture and cross-linking density optimization have significantly reduced viscoelastic losses, directly translating to faster actuation speeds.
Piezoelectric ceramics continue to advance through compositional modifications and crystal structure engineering. Lead-free alternatives based on potassium sodium niobate and bismuth ferrite systems now achieve piezoelectric coefficients comparable to traditional lead zirconate titanate while offering superior frequency response characteristics. Multilayer configurations and gradient structures have enhanced power density and reduced response latency to microsecond ranges.
Hybrid material systems combining multiple actuation mechanisms represent the frontier of fast-response biomimetic actuators. Composite architectures integrating conductive polymers with carbon nanotube networks demonstrate synergistic effects, where electrical conductivity enhancements enable rapid charge distribution while maintaining mechanical flexibility. These multi-functional materials achieve actuation frequencies exceeding 100 Hz while preserving the compliance necessary for biological mimicry.
Nanostructured materials offer unprecedented control over actuator performance through surface area maximization and enhanced ion transport kinetics. Graphene-based actuators exploit the material's exceptional electrical properties and mechanical strength, achieving strain rates that surpass conventional materials by orders of magnitude. The incorporation of functionalized graphene oxide layers creates hierarchical structures that optimize both speed and force generation capabilities.
Shape memory alloys represent a significant advancement in actuator materials, with recent developments in nickel-titanium compositions achieving response times under 10 milliseconds. These alloys demonstrate remarkable strain recovery rates exceeding 8% while maintaining structural integrity across millions of actuation cycles. Advanced heat treatment processes and microstructural engineering have optimized the martensitic transformation temperatures, enabling precise control over activation thresholds and response characteristics.
Electroactive polymers have revolutionized soft actuator design through their ability to generate large deformations under relatively low electrical stimulation. Dielectric elastomers, particularly those incorporating high-permittivity nanofillers such as barium titanate and carbon nanotubes, exhibit strain rates approaching 1000% per second. Recent breakthroughs in polymer chain architecture and cross-linking density optimization have significantly reduced viscoelastic losses, directly translating to faster actuation speeds.
Piezoelectric ceramics continue to advance through compositional modifications and crystal structure engineering. Lead-free alternatives based on potassium sodium niobate and bismuth ferrite systems now achieve piezoelectric coefficients comparable to traditional lead zirconate titanate while offering superior frequency response characteristics. Multilayer configurations and gradient structures have enhanced power density and reduced response latency to microsecond ranges.
Hybrid material systems combining multiple actuation mechanisms represent the frontier of fast-response biomimetic actuators. Composite architectures integrating conductive polymers with carbon nanotube networks demonstrate synergistic effects, where electrical conductivity enhancements enable rapid charge distribution while maintaining mechanical flexibility. These multi-functional materials achieve actuation frequencies exceeding 100 Hz while preserving the compliance necessary for biological mimicry.
Nanostructured materials offer unprecedented control over actuator performance through surface area maximization and enhanced ion transport kinetics. Graphene-based actuators exploit the material's exceptional electrical properties and mechanical strength, achieving strain rates that surpass conventional materials by orders of magnitude. The incorporation of functionalized graphene oxide layers creates hierarchical structures that optimize both speed and force generation capabilities.
Bio-Inspired Control Algorithms for Speed Enhancement
Bio-inspired control algorithms represent a paradigm shift in actuator speed optimization, drawing from natural systems that have evolved sophisticated mechanisms for rapid movement. These algorithms leverage computational models derived from biological neural networks, muscle activation patterns, and sensorimotor control systems to enhance actuator response times and movement precision.
Neural network-inspired control architectures form the foundation of speed enhancement strategies. Central pattern generators (CPGs), modeled after spinal cord circuits in vertebrates, provide rhythmic control signals that can coordinate multiple actuator elements simultaneously. These distributed control systems eliminate the latency associated with centralized processing, enabling real-time adaptation to dynamic loading conditions and environmental perturbations.
Adaptive learning algorithms inspired by synaptic plasticity mechanisms offer significant advantages for speed optimization. Reinforcement learning frameworks based on dopaminergic reward pathways allow actuators to continuously refine their control parameters through experience. These systems can automatically adjust activation timing, force distribution, and energy allocation patterns to minimize response delays while maintaining precision.
Predictive control strategies derived from cerebellar function enable proactive actuator management. Forward models that anticipate system dynamics allow controllers to pre-compensate for mechanical delays and inertial effects. This biological approach to motor control significantly reduces settling times and improves trajectory tracking performance in high-speed applications.
Hierarchical control architectures mimic the multi-level organization of biological motor systems, from spinal reflexes to cortical planning. Fast reflexive responses handle immediate disturbances at the actuator level, while higher-level controllers manage complex movement sequences and goal-directed behaviors. This layered approach optimizes both speed and adaptability.
Swarm intelligence algorithms inspired by collective animal behaviors offer novel solutions for multi-actuator systems. Distributed coordination protocols based on flocking, schooling, and swarming behaviors enable rapid synchronization of actuator arrays without centralized communication overhead. These bio-inspired approaches demonstrate particular promise for soft robotic systems requiring coordinated deformation patterns.
The integration of sensory feedback mechanisms modeled after proprioceptive and vestibular systems enhances control loop performance. Bio-inspired sensor fusion algorithms process multiple feedback channels to provide robust state estimation under dynamic conditions, enabling more aggressive control strategies that push actuator speed limits while maintaining stability.
Neural network-inspired control architectures form the foundation of speed enhancement strategies. Central pattern generators (CPGs), modeled after spinal cord circuits in vertebrates, provide rhythmic control signals that can coordinate multiple actuator elements simultaneously. These distributed control systems eliminate the latency associated with centralized processing, enabling real-time adaptation to dynamic loading conditions and environmental perturbations.
Adaptive learning algorithms inspired by synaptic plasticity mechanisms offer significant advantages for speed optimization. Reinforcement learning frameworks based on dopaminergic reward pathways allow actuators to continuously refine their control parameters through experience. These systems can automatically adjust activation timing, force distribution, and energy allocation patterns to minimize response delays while maintaining precision.
Predictive control strategies derived from cerebellar function enable proactive actuator management. Forward models that anticipate system dynamics allow controllers to pre-compensate for mechanical delays and inertial effects. This biological approach to motor control significantly reduces settling times and improves trajectory tracking performance in high-speed applications.
Hierarchical control architectures mimic the multi-level organization of biological motor systems, from spinal reflexes to cortical planning. Fast reflexive responses handle immediate disturbances at the actuator level, while higher-level controllers manage complex movement sequences and goal-directed behaviors. This layered approach optimizes both speed and adaptability.
Swarm intelligence algorithms inspired by collective animal behaviors offer novel solutions for multi-actuator systems. Distributed coordination protocols based on flocking, schooling, and swarming behaviors enable rapid synchronization of actuator arrays without centralized communication overhead. These bio-inspired approaches demonstrate particular promise for soft robotic systems requiring coordinated deformation patterns.
The integration of sensory feedback mechanisms modeled after proprioceptive and vestibular systems enhances control loop performance. Bio-inspired sensor fusion algorithms process multiple feedback channels to provide robust state estimation under dynamic conditions, enabling more aggressive control strategies that push actuator speed limits while maintaining stability.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!