How KERS optimizes robotic apparatus power consumption
AUG 15, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
KERS Background and Objectives
Kinetic Energy Recovery Systems (KERS) have emerged as a promising technology for optimizing power consumption in robotic apparatus. Originally developed for automotive applications, particularly in Formula One racing, KERS has found its way into robotics due to its potential to significantly enhance energy efficiency.
The primary objective of implementing KERS in robotic systems is to recover and reuse kinetic energy that would otherwise be lost during deceleration or braking. This recovered energy can then be stored and utilized to power various components of the robotic apparatus, thereby reducing overall power consumption and improving operational efficiency.
The evolution of KERS technology in robotics has been driven by the increasing demand for energy-efficient solutions in industrial automation, mobile robotics, and even humanoid robots. As robots become more prevalent in various sectors, the need for sustainable and cost-effective power management solutions has become paramount.
KERS in robotics typically involves the integration of regenerative braking systems, energy storage devices such as flywheels or supercapacitors, and sophisticated control algorithms. These components work in tandem to capture, store, and redistribute energy within the robotic system, optimizing power utilization across different operational modes.
The technology aims to address several key challenges in robotic power consumption. These include reducing the reliance on external power sources, extending operational runtime, and minimizing energy waste during repetitive tasks or idle periods. By harnessing otherwise dissipated energy, KERS can potentially lead to smaller battery requirements, lighter robotic designs, and improved overall system efficiency.
Recent advancements in materials science and control systems have further enhanced the potential of KERS in robotics. High-performance flywheels made from composite materials, for instance, offer higher energy density and lower losses compared to traditional steel flywheels. Similarly, advanced control algorithms enable more precise energy management, allowing for optimal distribution of recovered energy based on real-time operational demands.
Looking ahead, the integration of KERS with other emerging technologies such as artificial intelligence and machine learning presents exciting possibilities. These combinations could lead to adaptive energy recovery systems that can predict and optimize power consumption based on learned patterns of robotic behavior and environmental conditions.
As research in this field progresses, the overarching goal is to develop KERS solutions that are compact, lightweight, and seamlessly integrated into robotic designs. This would not only improve the energy efficiency of individual robots but could also contribute to the broader objective of creating more sustainable and environmentally friendly robotic systems across various industries.
The primary objective of implementing KERS in robotic systems is to recover and reuse kinetic energy that would otherwise be lost during deceleration or braking. This recovered energy can then be stored and utilized to power various components of the robotic apparatus, thereby reducing overall power consumption and improving operational efficiency.
The evolution of KERS technology in robotics has been driven by the increasing demand for energy-efficient solutions in industrial automation, mobile robotics, and even humanoid robots. As robots become more prevalent in various sectors, the need for sustainable and cost-effective power management solutions has become paramount.
KERS in robotics typically involves the integration of regenerative braking systems, energy storage devices such as flywheels or supercapacitors, and sophisticated control algorithms. These components work in tandem to capture, store, and redistribute energy within the robotic system, optimizing power utilization across different operational modes.
The technology aims to address several key challenges in robotic power consumption. These include reducing the reliance on external power sources, extending operational runtime, and minimizing energy waste during repetitive tasks or idle periods. By harnessing otherwise dissipated energy, KERS can potentially lead to smaller battery requirements, lighter robotic designs, and improved overall system efficiency.
Recent advancements in materials science and control systems have further enhanced the potential of KERS in robotics. High-performance flywheels made from composite materials, for instance, offer higher energy density and lower losses compared to traditional steel flywheels. Similarly, advanced control algorithms enable more precise energy management, allowing for optimal distribution of recovered energy based on real-time operational demands.
Looking ahead, the integration of KERS with other emerging technologies such as artificial intelligence and machine learning presents exciting possibilities. These combinations could lead to adaptive energy recovery systems that can predict and optimize power consumption based on learned patterns of robotic behavior and environmental conditions.
As research in this field progresses, the overarching goal is to develop KERS solutions that are compact, lightweight, and seamlessly integrated into robotic designs. This would not only improve the energy efficiency of individual robots but could also contribute to the broader objective of creating more sustainable and environmentally friendly robotic systems across various industries.
Market Demand for Energy-Efficient Robotics
The market demand for energy-efficient robotics has been steadily increasing in recent years, driven by a combination of economic, environmental, and regulatory factors. Industries across various sectors are recognizing the potential of robotic systems to enhance productivity and efficiency, but are also becoming increasingly aware of the associated energy costs and environmental impact.
In the manufacturing sector, which accounts for a significant portion of global energy consumption, there is a growing emphasis on sustainable production practices. Energy-efficient robots are seen as a key component in reducing overall energy consumption and operational costs. Major automotive manufacturers, for instance, have reported energy savings of up to 20-30% by implementing energy-efficient robotic systems in their production lines.
The logistics and warehousing industry is another major driver of demand for energy-efficient robotics. With the rapid growth of e-commerce, warehouses are under pressure to optimize their operations while minimizing energy usage. Energy-efficient robotic systems for picking, packing, and sorting are increasingly being adopted by large e-commerce companies and third-party logistics providers.
In the healthcare sector, there is a rising demand for robotic systems in surgical procedures, patient care, and laboratory automation. Energy efficiency is particularly crucial in this context, as hospitals and healthcare facilities are under constant pressure to reduce operational costs while maintaining high standards of care.
The agriculture industry is also showing increased interest in energy-efficient robotic systems for tasks such as planting, harvesting, and crop monitoring. As farms face challenges related to labor shortages and the need for sustainable practices, energy-efficient robots offer a promising solution.
Market research indicates that the global market for energy-efficient robotics is expected to grow at a compound annual growth rate (CAGR) of over 10% in the next five years. This growth is particularly strong in regions with high energy costs and stringent environmental regulations, such as Europe and parts of Asia.
Governments and regulatory bodies worldwide are implementing policies and incentives to promote energy efficiency in industrial processes, further driving the demand for energy-efficient robotics. For example, the European Union's Eco-design Directive and Energy Labelling Regulation are encouraging manufacturers to develop more energy-efficient products, including robotic systems.
As awareness of climate change and corporate social responsibility increases, many companies are setting ambitious sustainability goals. This has led to a growing demand for energy-efficient technologies across all aspects of their operations, including robotics.
In the manufacturing sector, which accounts for a significant portion of global energy consumption, there is a growing emphasis on sustainable production practices. Energy-efficient robots are seen as a key component in reducing overall energy consumption and operational costs. Major automotive manufacturers, for instance, have reported energy savings of up to 20-30% by implementing energy-efficient robotic systems in their production lines.
The logistics and warehousing industry is another major driver of demand for energy-efficient robotics. With the rapid growth of e-commerce, warehouses are under pressure to optimize their operations while minimizing energy usage. Energy-efficient robotic systems for picking, packing, and sorting are increasingly being adopted by large e-commerce companies and third-party logistics providers.
In the healthcare sector, there is a rising demand for robotic systems in surgical procedures, patient care, and laboratory automation. Energy efficiency is particularly crucial in this context, as hospitals and healthcare facilities are under constant pressure to reduce operational costs while maintaining high standards of care.
The agriculture industry is also showing increased interest in energy-efficient robotic systems for tasks such as planting, harvesting, and crop monitoring. As farms face challenges related to labor shortages and the need for sustainable practices, energy-efficient robots offer a promising solution.
Market research indicates that the global market for energy-efficient robotics is expected to grow at a compound annual growth rate (CAGR) of over 10% in the next five years. This growth is particularly strong in regions with high energy costs and stringent environmental regulations, such as Europe and parts of Asia.
Governments and regulatory bodies worldwide are implementing policies and incentives to promote energy efficiency in industrial processes, further driving the demand for energy-efficient robotics. For example, the European Union's Eco-design Directive and Energy Labelling Regulation are encouraging manufacturers to develop more energy-efficient products, including robotic systems.
As awareness of climate change and corporate social responsibility increases, many companies are setting ambitious sustainability goals. This has led to a growing demand for energy-efficient technologies across all aspects of their operations, including robotics.
KERS Challenges in Robotic Applications
The integration of Kinetic Energy Recovery Systems (KERS) in robotic applications presents several significant challenges that researchers and engineers must address. One of the primary obstacles is the adaptation of KERS technology, originally developed for automotive applications, to the unique requirements of robotic systems. The intermittent and often unpredictable nature of robotic movements creates difficulties in optimizing energy recovery and storage.
A major challenge lies in the miniaturization of KERS components to fit within the compact form factors of many robotic platforms. This requires innovative engineering solutions to reduce the size and weight of flywheels, generators, and energy storage systems without compromising their efficiency. The need for lightweight components is particularly crucial in mobile robots, where every gram of added weight can significantly impact overall performance and energy consumption.
Another significant hurdle is the development of sophisticated control algorithms capable of managing the complex energy flows within a KERS-equipped robotic system. These algorithms must accurately predict energy demands, optimize recovery during deceleration phases, and efficiently distribute stored energy during acceleration or high-demand operations. The variability in robotic tasks and environments further complicates this challenge, necessitating adaptive control strategies that can respond to changing conditions in real-time.
The integration of KERS with existing robotic power systems poses additional challenges. Engineers must design interfaces that allow seamless interaction between the KERS and the robot's primary power source, whether it be batteries, fuel cells, or direct electrical connections. This integration must ensure that the KERS complements rather than interferes with the robot's existing power management systems, requiring careful consideration of power electronics and energy routing mechanisms.
Durability and reliability of KERS components in robotic applications represent another critical challenge. Robotic systems often operate in harsh environments and may be subjected to frequent starts, stops, and rapid directional changes. KERS components, particularly moving parts like flywheels, must be designed to withstand these conditions while maintaining consistent performance over extended periods.
Lastly, the cost-effectiveness of implementing KERS in robotic systems remains a significant challenge. While the technology promises improved energy efficiency, the initial investment in research, development, and implementation must be balanced against the potential energy savings and performance improvements. This economic consideration is particularly relevant for mass-produced robotic systems, where even small increases in component costs can have substantial impacts on overall product viability.
A major challenge lies in the miniaturization of KERS components to fit within the compact form factors of many robotic platforms. This requires innovative engineering solutions to reduce the size and weight of flywheels, generators, and energy storage systems without compromising their efficiency. The need for lightweight components is particularly crucial in mobile robots, where every gram of added weight can significantly impact overall performance and energy consumption.
Another significant hurdle is the development of sophisticated control algorithms capable of managing the complex energy flows within a KERS-equipped robotic system. These algorithms must accurately predict energy demands, optimize recovery during deceleration phases, and efficiently distribute stored energy during acceleration or high-demand operations. The variability in robotic tasks and environments further complicates this challenge, necessitating adaptive control strategies that can respond to changing conditions in real-time.
The integration of KERS with existing robotic power systems poses additional challenges. Engineers must design interfaces that allow seamless interaction between the KERS and the robot's primary power source, whether it be batteries, fuel cells, or direct electrical connections. This integration must ensure that the KERS complements rather than interferes with the robot's existing power management systems, requiring careful consideration of power electronics and energy routing mechanisms.
Durability and reliability of KERS components in robotic applications represent another critical challenge. Robotic systems often operate in harsh environments and may be subjected to frequent starts, stops, and rapid directional changes. KERS components, particularly moving parts like flywheels, must be designed to withstand these conditions while maintaining consistent performance over extended periods.
Lastly, the cost-effectiveness of implementing KERS in robotic systems remains a significant challenge. While the technology promises improved energy efficiency, the initial investment in research, development, and implementation must be balanced against the potential energy savings and performance improvements. This economic consideration is particularly relevant for mass-produced robotic systems, where even small increases in component costs can have substantial impacts on overall product viability.
Current KERS Solutions for Robots
01 Energy efficiency optimization in KERS
Improving the energy efficiency of Kinetic Energy Recovery Systems (KERS) is crucial for reducing power consumption. This involves optimizing the energy conversion process, minimizing losses during energy storage and retrieval, and enhancing the overall system design to maximize energy recovery during braking and deceleration.- Energy efficiency optimization in KERS: KERS systems are designed to optimize energy efficiency by recovering kinetic energy during braking and converting it into usable power. This process involves minimizing power consumption through advanced control strategies, efficient energy conversion, and storage technologies. Improvements in system design and components contribute to reducing overall power consumption while maximizing energy recovery.
- Integration of KERS with vehicle systems: The integration of KERS with other vehicle systems, such as the powertrain and electrical systems, plays a crucial role in managing power consumption. This integration allows for optimized energy distribution, balancing power demands between the KERS and other vehicle components. Advanced control algorithms and system architectures are employed to ensure efficient power management across the entire vehicle.
- Energy storage technologies for KERS: The choice and design of energy storage technologies significantly impact KERS power consumption. Advanced battery systems, supercapacitors, and hybrid storage solutions are developed to improve energy density, charge/discharge efficiency, and overall system performance. These technologies aim to reduce power losses during energy storage and retrieval processes.
- Regenerative braking efficiency: Enhancing the efficiency of regenerative braking is crucial for reducing KERS power consumption. This involves optimizing the energy capture during deceleration, improving the conversion of kinetic energy to electrical energy, and minimizing losses in the process. Advanced braking systems and control strategies are developed to maximize energy recovery while maintaining vehicle stability and safety.
- Lightweight and compact KERS design: Developing lightweight and compact KERS designs contributes to reduced power consumption by minimizing the system's overall mass and improving vehicle efficiency. This includes the use of advanced materials, innovative component designs, and integrated system architectures that reduce weight and size while maintaining or improving performance and energy recovery capabilities.
02 Advanced control strategies for KERS power management
Implementing sophisticated control algorithms and strategies can significantly reduce power consumption in KERS. These may include predictive control methods, adaptive energy management systems, and intelligent power distribution techniques that optimize the use of recovered energy based on driving conditions and vehicle demands.Expand Specific Solutions03 Integration of KERS with other vehicle systems
Integrating KERS with other vehicle systems, such as regenerative braking, start-stop systems, and hybrid powertrains, can lead to synergistic effects that reduce overall power consumption. This integration allows for more efficient energy recovery and utilization across various vehicle operations.Expand Specific Solutions04 Lightweight and high-efficiency KERS components
Developing lightweight and high-efficiency components for KERS, such as advanced energy storage devices, low-loss power electronics, and optimized mechanical systems, can significantly reduce power losses and improve overall system efficiency. This includes the use of novel materials and designs to minimize energy dissipation.Expand Specific Solutions05 Adaptive KERS operation based on driving conditions
Implementing adaptive KERS operation that adjusts its performance based on real-time driving conditions can optimize power consumption. This may involve varying the energy recovery and deployment strategies according to factors such as vehicle speed, road gradient, traffic conditions, and driver behavior.Expand Specific Solutions
Key Players in KERS for Robotics
The competition landscape for KERS (Kinetic Energy Recovery System) optimization in robotic apparatus power consumption is in a growth phase, with increasing market size and technological advancements. The market is driven by the automotive and industrial robotics sectors, with key players like Volvo Lastvagnar AB, KUKA Deutschland GmbH, and YASKAWA Electric Corp. leading innovation. Academic institutions such as Zhejiang University and Chongqing University are contributing to research and development. The technology is maturing, with companies like Marelli Europe SpA and Caterpillar, Inc. integrating KERS into their products. Emerging players like Horizon Robotics and Nano One Materials Corp. are exploring novel applications, indicating a dynamic and competitive environment with potential for further growth and efficiency improvements.
KUKA Deutschland GmbH
Technical Solution: KUKA has developed an innovative KERS (Kinetic Energy Recovery System) for their robotic apparatus to optimize power consumption. Their system utilizes regenerative braking technology, converting kinetic energy from the robot's movements into electrical energy, which is then stored in high-capacity ultracapacitors[1]. This stored energy is reused during subsequent acceleration phases, significantly reducing the overall power draw from the main power supply. KUKA's KERS implementation also includes advanced energy management algorithms that predict energy demands based on the robot's programmed movements, allowing for optimal energy distribution and utilization[3]. The system is designed to be modular and can be integrated into various robot models across their product line, ensuring widespread applicability and energy savings[5].
Strengths: Significant reduction in power consumption, increased energy efficiency, and potential for application across various robot models. Weaknesses: Initial implementation costs and potential complexity in retrofitting existing systems.
YASKAWA Electric Corp.
Technical Solution: YASKAWA has implemented a sophisticated KERS solution for their robotic systems, focusing on maximizing energy recovery and minimizing power consumption. Their approach integrates high-efficiency motors with advanced power electronics to capture and store energy during deceleration phases[2]. The recovered energy is stored in a hybrid system combining lithium-ion batteries and supercapacitors, optimizing both energy density and power density[4]. YASKAWA's system also incorporates intelligent power management software that analyzes the robot's operation patterns to predict energy needs and optimize power distribution. This predictive capability allows for more efficient use of recovered energy and reduces reliance on external power sources[6]. Additionally, YASKAWA has developed a thermal management system that helps maintain optimal operating temperatures for the energy storage components, enhancing overall system efficiency and longevity[8].
Strengths: High energy recovery efficiency, intelligent power management, and thermal optimization for improved system longevity. Weaknesses: Potential for increased system complexity and higher initial costs compared to traditional systems.
KERS Innovations for Power Optimization
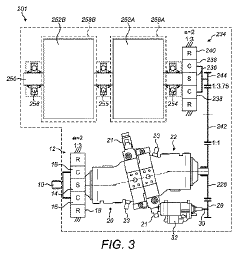
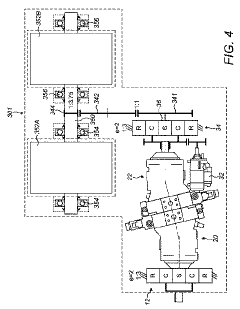
Kinetic energy regeneration system
PatentActiveJP2019521032A
Innovation
- A kinetic energy recovery system (KERS) incorporating a first speed increasing gear unit, hydraulic variator with oblique axis motors, and a flywheel positioned in a vacuum chamber, controlled by an electronic control unit (ECU) to manage energy storage and retrieval efficiently.


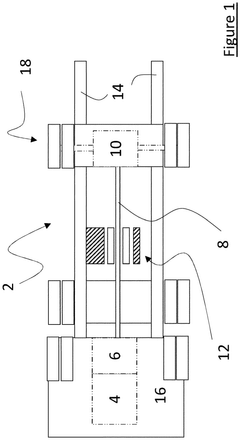
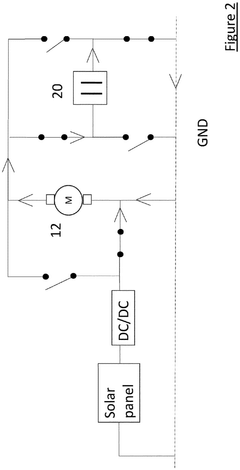
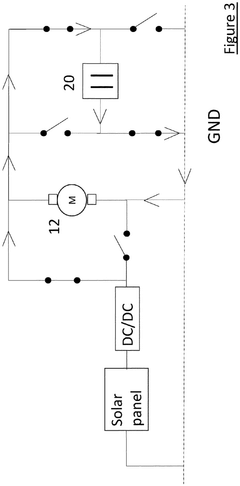
Vehicle equipped with at least one solar panel, a supercapacitor and a kinetic energy recovery system
PatentPendingEP4446148A1
Innovation
- A vehicle equipped with a kinetic energy recuperation system using a supercapacitor and solar panels connected to an electric machine on the transmission shaft, where a controller directs solar energy to either the electric machine or supercapacitor based on torque demand, optimizing energy use and storage.
Environmental Impact of KERS in Robotics
The implementation of Kinetic Energy Recovery Systems (KERS) in robotics has significant environmental implications, extending beyond mere power optimization. By capturing and reusing energy that would otherwise be lost during braking or deceleration, KERS contributes to a substantial reduction in overall energy consumption. This efficiency gain translates directly into decreased power demands from the grid or battery systems, leading to a lower carbon footprint associated with robotic operations.
In industrial settings, where robots often perform repetitive tasks involving frequent starts and stops, the cumulative energy savings from KERS can be substantial. This reduction in energy waste not only lowers operational costs but also diminishes the environmental impact of manufacturing processes. The decreased reliance on external power sources means fewer emissions from power plants, particularly in regions where fossil fuels remain a significant part of the energy mix.
Moreover, the integration of KERS in mobile robots and autonomous vehicles can extend their operational range without increasing battery capacity. This has twofold environmental benefits: it reduces the need for frequent recharging, which often relies on grid electricity, and it potentially decreases the demand for larger batteries, whose production carries its own environmental costs in terms of resource extraction and manufacturing emissions.
The environmental benefits of KERS in robotics also extend to the realm of e-waste reduction. By optimizing power consumption, KERS can potentially extend the lifespan of robotic components, particularly batteries and motors, which are often the first to degrade due to high energy demands. This longevity reduces the frequency of replacements, thereby minimizing the electronic waste generated by robotic systems over their operational lifetime.
In urban environments, where delivery robots and autonomous vehicles are becoming increasingly common, KERS can play a crucial role in noise reduction. The system's ability to capture and reuse kinetic energy means less reliance on traditional braking systems, which are a significant source of urban noise pollution. This quieter operation contributes to improved quality of life in urban areas, an often-overlooked environmental benefit.
Furthermore, the adoption of KERS in robotics sets a precedent for energy-efficient design across the broader field of automation and machinery. As this technology becomes more widespread, it has the potential to influence design philosophies in related industries, promoting a culture of energy conservation and sustainability in technological development.
In industrial settings, where robots often perform repetitive tasks involving frequent starts and stops, the cumulative energy savings from KERS can be substantial. This reduction in energy waste not only lowers operational costs but also diminishes the environmental impact of manufacturing processes. The decreased reliance on external power sources means fewer emissions from power plants, particularly in regions where fossil fuels remain a significant part of the energy mix.
Moreover, the integration of KERS in mobile robots and autonomous vehicles can extend their operational range without increasing battery capacity. This has twofold environmental benefits: it reduces the need for frequent recharging, which often relies on grid electricity, and it potentially decreases the demand for larger batteries, whose production carries its own environmental costs in terms of resource extraction and manufacturing emissions.
The environmental benefits of KERS in robotics also extend to the realm of e-waste reduction. By optimizing power consumption, KERS can potentially extend the lifespan of robotic components, particularly batteries and motors, which are often the first to degrade due to high energy demands. This longevity reduces the frequency of replacements, thereby minimizing the electronic waste generated by robotic systems over their operational lifetime.
In urban environments, where delivery robots and autonomous vehicles are becoming increasingly common, KERS can play a crucial role in noise reduction. The system's ability to capture and reuse kinetic energy means less reliance on traditional braking systems, which are a significant source of urban noise pollution. This quieter operation contributes to improved quality of life in urban areas, an often-overlooked environmental benefit.
Furthermore, the adoption of KERS in robotics sets a precedent for energy-efficient design across the broader field of automation and machinery. As this technology becomes more widespread, it has the potential to influence design philosophies in related industries, promoting a culture of energy conservation and sustainability in technological development.
KERS Integration Strategies for Robots
The integration of Kinetic Energy Recovery Systems (KERS) into robotic apparatus presents a promising avenue for optimizing power consumption and enhancing overall efficiency. KERS technology, originally developed for automotive applications, can be adapted to capture and store energy during deceleration or braking phases of robotic movements, which can then be redeployed to power subsequent actions.
One key strategy for KERS integration in robots involves the implementation of regenerative braking systems. This approach allows for the conversion of kinetic energy, typically lost as heat during braking, into electrical energy that can be stored in batteries or capacitors. By incorporating high-efficiency electric motors and advanced power electronics, robots can effectively harness this recovered energy to supplement their primary power source.
Another integration strategy focuses on the optimization of energy storage systems. Utilizing advanced battery technologies or supercapacitors can significantly improve the ability to rapidly store and release recovered energy. This is particularly crucial for robots that undergo frequent acceleration and deceleration cycles, as it allows for more efficient energy management and reduces reliance on external power sources.
The integration of intelligent energy management systems represents a third strategy for KERS implementation in robotics. By employing sophisticated algorithms and sensors, robots can dynamically adjust their energy recovery and utilization based on operational demands and environmental conditions. This adaptive approach ensures that energy is recovered and deployed in the most efficient manner possible, further optimizing power consumption.
Modular KERS designs offer yet another integration strategy, allowing for scalability and adaptability across various robotic platforms. This approach enables manufacturers to incorporate KERS technology into a wide range of robotic systems, from small, agile units to large, industrial-scale machines, with minimal redesign requirements.
Lastly, the integration of KERS with other energy-efficient technologies, such as lightweight materials and aerodynamic designs, can create synergistic effects that further enhance overall power optimization. This holistic approach to energy efficiency ensures that the benefits of KERS are maximized within the context of the entire robotic system.
One key strategy for KERS integration in robots involves the implementation of regenerative braking systems. This approach allows for the conversion of kinetic energy, typically lost as heat during braking, into electrical energy that can be stored in batteries or capacitors. By incorporating high-efficiency electric motors and advanced power electronics, robots can effectively harness this recovered energy to supplement their primary power source.
Another integration strategy focuses on the optimization of energy storage systems. Utilizing advanced battery technologies or supercapacitors can significantly improve the ability to rapidly store and release recovered energy. This is particularly crucial for robots that undergo frequent acceleration and deceleration cycles, as it allows for more efficient energy management and reduces reliance on external power sources.
The integration of intelligent energy management systems represents a third strategy for KERS implementation in robotics. By employing sophisticated algorithms and sensors, robots can dynamically adjust their energy recovery and utilization based on operational demands and environmental conditions. This adaptive approach ensures that energy is recovered and deployed in the most efficient manner possible, further optimizing power consumption.
Modular KERS designs offer yet another integration strategy, allowing for scalability and adaptability across various robotic platforms. This approach enables manufacturers to incorporate KERS technology into a wide range of robotic systems, from small, agile units to large, industrial-scale machines, with minimal redesign requirements.
Lastly, the integration of KERS with other energy-efficient technologies, such as lightweight materials and aerodynamic designs, can create synergistic effects that further enhance overall power optimization. This holistic approach to energy efficiency ensures that the benefits of KERS are maximized within the context of the entire robotic system.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!