

How to Implement Tactile Sensing in Micro-Robots
APR 11, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Micro-Robot Tactile Sensing Background and Objectives
Tactile sensing in micro-robotics represents a convergence of miniaturization technologies, advanced materials science, and sophisticated sensing mechanisms that has evolved significantly over the past two decades. The field emerged from the fundamental need to provide micro-scale robotic systems with the ability to perceive and interact with their environment through physical contact, enabling applications ranging from minimally invasive medical procedures to precision manufacturing and environmental monitoring.
The historical development of micro-robot tactile sensing can be traced back to early MEMS (Micro-Electro-Mechanical Systems) technologies in the 1990s, which laid the groundwork for miniaturized force and pressure sensors. Initial implementations focused primarily on silicon-based piezoresistive sensors, but the field has since expanded to encompass capacitive, piezoelectric, optical, and magnetic sensing principles. The integration of these sensing modalities into increasingly smaller robotic platforms has been driven by advances in semiconductor fabrication, nanotechnology, and materials engineering.
Current technological trends indicate a shift toward multi-modal sensing approaches that combine tactile feedback with other sensory inputs to create comprehensive perception systems. The development of flexible and biocompatible sensing materials has opened new possibilities for applications in biological environments, while advances in wireless power transmission and data communication have addressed the challenges of integrating sensing systems into untethered micro-robots.
The primary technical objectives in implementing tactile sensing for micro-robots encompass several critical dimensions. Force resolution represents a fundamental challenge, requiring sensors capable of detecting forces in the micro-Newton to milli-Newton range while maintaining sufficient signal-to-noise ratios. Spatial resolution objectives focus on achieving tactile sensing arrays with feature sizes comparable to the robot dimensions, typically in the range of tens to hundreds of micrometers.
Integration objectives emphasize the seamless incorporation of sensing elements into the robot structure without significantly increasing size, weight, or power consumption. This includes developing sensing systems that can operate within the severe constraints of micro-robot platforms, where available space for electronics, power sources, and communication systems is extremely limited.
Real-time processing capabilities represent another crucial objective, requiring the development of efficient algorithms and hardware architectures that can process tactile information with minimal computational overhead. The goal is to enable immediate feedback for control systems while maintaining the responsiveness necessary for dynamic interactions with the environment.
Robustness and reliability objectives address the need for sensing systems that can withstand the harsh operating conditions often encountered by micro-robots, including exposure to biological fluids, extreme temperatures, and mechanical stress. Long-term stability and biocompatibility are particularly important for medical applications where sensors must function reliably over extended periods without degradation or adverse biological reactions.
The historical development of micro-robot tactile sensing can be traced back to early MEMS (Micro-Electro-Mechanical Systems) technologies in the 1990s, which laid the groundwork for miniaturized force and pressure sensors. Initial implementations focused primarily on silicon-based piezoresistive sensors, but the field has since expanded to encompass capacitive, piezoelectric, optical, and magnetic sensing principles. The integration of these sensing modalities into increasingly smaller robotic platforms has been driven by advances in semiconductor fabrication, nanotechnology, and materials engineering.
Current technological trends indicate a shift toward multi-modal sensing approaches that combine tactile feedback with other sensory inputs to create comprehensive perception systems. The development of flexible and biocompatible sensing materials has opened new possibilities for applications in biological environments, while advances in wireless power transmission and data communication have addressed the challenges of integrating sensing systems into untethered micro-robots.
The primary technical objectives in implementing tactile sensing for micro-robots encompass several critical dimensions. Force resolution represents a fundamental challenge, requiring sensors capable of detecting forces in the micro-Newton to milli-Newton range while maintaining sufficient signal-to-noise ratios. Spatial resolution objectives focus on achieving tactile sensing arrays with feature sizes comparable to the robot dimensions, typically in the range of tens to hundreds of micrometers.
Integration objectives emphasize the seamless incorporation of sensing elements into the robot structure without significantly increasing size, weight, or power consumption. This includes developing sensing systems that can operate within the severe constraints of micro-robot platforms, where available space for electronics, power sources, and communication systems is extremely limited.
Real-time processing capabilities represent another crucial objective, requiring the development of efficient algorithms and hardware architectures that can process tactile information with minimal computational overhead. The goal is to enable immediate feedback for control systems while maintaining the responsiveness necessary for dynamic interactions with the environment.
Robustness and reliability objectives address the need for sensing systems that can withstand the harsh operating conditions often encountered by micro-robots, including exposure to biological fluids, extreme temperatures, and mechanical stress. Long-term stability and biocompatibility are particularly important for medical applications where sensors must function reliably over extended periods without degradation or adverse biological reactions.
Market Demand for Tactile-Enabled Micro-Robotics
The market demand for tactile-enabled micro-robotics is experiencing unprecedented growth driven by the convergence of miniaturization technologies and the increasing need for precision operations in confined environments. Healthcare applications represent the most significant demand driver, particularly in minimally invasive surgical procedures, targeted drug delivery systems, and diagnostic microsystems. The aging global population and rising healthcare costs are accelerating adoption of micro-robotic solutions that can perform delicate operations with enhanced tactile feedback capabilities.
Industrial automation sectors are demonstrating substantial interest in tactile-sensing micro-robots for quality control and precision manufacturing processes. Electronics manufacturing, particularly semiconductor fabrication and micro-component assembly, requires robots capable of handling fragile materials while providing real-time tactile information. The miniaturization trend in consumer electronics is creating new opportunities for micro-robots equipped with sophisticated sensing capabilities.
Research institutions and academic laboratories constitute a growing market segment, driven by increased funding for robotics research and the need for advanced experimental platforms. Government initiatives supporting robotics innovation and defense applications are contributing to market expansion, particularly for reconnaissance and surveillance micro-systems requiring environmental interaction capabilities.
The market exhibits strong regional variations, with North America and Europe leading in healthcare applications, while Asia-Pacific shows rapid growth in industrial automation segments. Technology adoption barriers include high development costs, integration complexity, and regulatory challenges in medical applications. However, advancing manufacturing techniques and decreasing component costs are making tactile-enabled micro-robotics increasingly accessible.
Market growth is further supported by emerging applications in environmental monitoring, space exploration, and consumer robotics. The integration of artificial intelligence with tactile sensing capabilities is creating new value propositions, enabling autonomous decision-making in micro-scale operations. Industry analysts project sustained demand growth as technological maturity increases and cost barriers continue to diminish across multiple application domains.
Industrial automation sectors are demonstrating substantial interest in tactile-sensing micro-robots for quality control and precision manufacturing processes. Electronics manufacturing, particularly semiconductor fabrication and micro-component assembly, requires robots capable of handling fragile materials while providing real-time tactile information. The miniaturization trend in consumer electronics is creating new opportunities for micro-robots equipped with sophisticated sensing capabilities.
Research institutions and academic laboratories constitute a growing market segment, driven by increased funding for robotics research and the need for advanced experimental platforms. Government initiatives supporting robotics innovation and defense applications are contributing to market expansion, particularly for reconnaissance and surveillance micro-systems requiring environmental interaction capabilities.
The market exhibits strong regional variations, with North America and Europe leading in healthcare applications, while Asia-Pacific shows rapid growth in industrial automation segments. Technology adoption barriers include high development costs, integration complexity, and regulatory challenges in medical applications. However, advancing manufacturing techniques and decreasing component costs are making tactile-enabled micro-robotics increasingly accessible.
Market growth is further supported by emerging applications in environmental monitoring, space exploration, and consumer robotics. The integration of artificial intelligence with tactile sensing capabilities is creating new value propositions, enabling autonomous decision-making in micro-scale operations. Industry analysts project sustained demand growth as technological maturity increases and cost barriers continue to diminish across multiple application domains.
Current State and Challenges of Micro-Scale Tactile Sensors
The current landscape of micro-scale tactile sensors presents a complex technological ecosystem with significant achievements alongside persistent challenges. Leading research institutions and technology companies have developed various sensing mechanisms, including piezoresistive, capacitive, piezoelectric, and optical approaches, each demonstrating unique advantages for specific micro-robotic applications. Silicon-based MEMS sensors dominate the commercial market due to their compatibility with semiconductor manufacturing processes, while emerging materials like graphene, carbon nanotubes, and conductive polymers show promising characteristics for next-generation implementations.
Manufacturing precision remains one of the most critical challenges in micro-scale tactile sensor development. Current fabrication techniques struggle to achieve consistent sensor performance at dimensions below 100 micrometers, where surface roughness and material impurities significantly impact sensing accuracy. The integration of multiple sensing elements within confined spaces creates additional complexity, as cross-talk between adjacent sensors can compromise measurement reliability. Advanced lithography and etching processes have improved manufacturing tolerances, yet yield rates for high-density sensor arrays remain economically challenging.
Signal processing and noise management present substantial technical hurdles at micro-scales. The inherently weak signals generated by miniaturized sensors are susceptible to electromagnetic interference, thermal fluctuations, and mechanical vibrations from the micro-robot's actuators. Current amplification circuits often introduce additional noise, requiring sophisticated filtering algorithms that consume valuable computational resources. The development of low-noise, high-gain amplifiers specifically designed for micro-scale applications remains an active area of research.
Power consumption constraints significantly limit the operational capabilities of micro-scale tactile sensors. Traditional sensing circuits require power levels that exceed the energy budgets of most micro-robotic systems, necessitating innovative approaches to ultra-low-power sensor design. Recent advances in energy harvesting techniques and power management circuits have shown potential, but achieving continuous tactile sensing operation within micro-watt power envelopes remains challenging.
Material durability and sensor longevity pose additional concerns for practical micro-robotic applications. The mechanical stress cycles, environmental exposure, and potential contamination encountered during micro-robot operations can degrade sensor performance over time. Current protective coatings and encapsulation methods add bulk and complexity to sensor designs, creating trade-offs between durability and miniaturization objectives. Research into self-healing materials and robust sensing mechanisms continues to address these reliability concerns.
Integration complexity represents another significant challenge, as micro-scale tactile sensors must interface seamlessly with micro-robot control systems, communication modules, and mechanical structures. The limited space available for interconnects and the need for flexible sensor mounting solutions complicate system-level design. Current approaches often require custom integration solutions that increase development costs and limit scalability across different micro-robotic platforms.
Manufacturing precision remains one of the most critical challenges in micro-scale tactile sensor development. Current fabrication techniques struggle to achieve consistent sensor performance at dimensions below 100 micrometers, where surface roughness and material impurities significantly impact sensing accuracy. The integration of multiple sensing elements within confined spaces creates additional complexity, as cross-talk between adjacent sensors can compromise measurement reliability. Advanced lithography and etching processes have improved manufacturing tolerances, yet yield rates for high-density sensor arrays remain economically challenging.
Signal processing and noise management present substantial technical hurdles at micro-scales. The inherently weak signals generated by miniaturized sensors are susceptible to electromagnetic interference, thermal fluctuations, and mechanical vibrations from the micro-robot's actuators. Current amplification circuits often introduce additional noise, requiring sophisticated filtering algorithms that consume valuable computational resources. The development of low-noise, high-gain amplifiers specifically designed for micro-scale applications remains an active area of research.
Power consumption constraints significantly limit the operational capabilities of micro-scale tactile sensors. Traditional sensing circuits require power levels that exceed the energy budgets of most micro-robotic systems, necessitating innovative approaches to ultra-low-power sensor design. Recent advances in energy harvesting techniques and power management circuits have shown potential, but achieving continuous tactile sensing operation within micro-watt power envelopes remains challenging.
Material durability and sensor longevity pose additional concerns for practical micro-robotic applications. The mechanical stress cycles, environmental exposure, and potential contamination encountered during micro-robot operations can degrade sensor performance over time. Current protective coatings and encapsulation methods add bulk and complexity to sensor designs, creating trade-offs between durability and miniaturization objectives. Research into self-healing materials and robust sensing mechanisms continues to address these reliability concerns.
Integration complexity represents another significant challenge, as micro-scale tactile sensors must interface seamlessly with micro-robot control systems, communication modules, and mechanical structures. The limited space available for interconnects and the need for flexible sensor mounting solutions complicate system-level design. Current approaches often require custom integration solutions that increase development costs and limit scalability across different micro-robotic platforms.
Existing Tactile Sensing Solutions for Micro-Robots
01 Capacitive tactile sensing technology
Capacitive sensing technology is widely used in tactile sensors to detect touch, pressure, and proximity. This technology measures changes in capacitance when an object comes into contact with or approaches the sensor surface. The sensors can be integrated into various devices and surfaces to provide touch-sensitive interfaces. Capacitive tactile sensors offer high sensitivity, fast response times, and the ability to detect multiple touch points simultaneously. They are commonly used in touchscreens, robotics, and human-machine interfaces.- Capacitive tactile sensing technology: Capacitive sensing technology is widely used in tactile sensors to detect touch, pressure, and proximity. This technology measures changes in capacitance when an object comes into contact with or approaches the sensor surface. The sensors can be integrated into various devices and surfaces to provide touch-sensitive interfaces. Capacitive tactile sensors offer high sensitivity, fast response times, and the ability to detect multiple touch points simultaneously. They are commonly used in touchscreens, robotic applications, and human-machine interfaces.
- Piezoresistive and piezoelectric tactile sensors: Piezoresistive and piezoelectric materials are utilized in tactile sensors to convert mechanical pressure or force into electrical signals. These sensors can detect varying levels of pressure and force distribution across a surface. The technology enables precise measurement of contact forces and is particularly useful in applications requiring force feedback. Such sensors are employed in robotics for grip control, medical devices for pressure monitoring, and wearable devices for health monitoring. The materials used can include conductive polymers, carbon-based composites, and specialized ceramics.
- Flexible and stretchable tactile sensor arrays: Flexible and stretchable tactile sensor arrays are designed to conform to curved or irregular surfaces while maintaining sensing capabilities. These sensors use flexible substrates and stretchable conductive materials to create sensor arrays that can bend and stretch without losing functionality. The technology enables integration into soft robotics, electronic skin applications, and wearable devices. Advanced fabrication techniques allow for high-density sensor arrays with spatial resolution for detailed tactile mapping. These sensors can detect pressure distribution, shear forces, and temperature variations simultaneously.
- Optical and vision-based tactile sensing: Optical tactile sensing methods use light-based technologies to detect and measure contact and deformation. These systems typically employ cameras, light sources, and optical markers or patterns to track surface deformation when touched. Vision-based tactile sensors can provide high-resolution spatial information about contact geometry and force distribution. The technology is particularly useful for applications requiring detailed surface texture recognition and slip detection. Such sensors are increasingly used in robotic manipulation tasks and quality inspection systems.
- Multi-modal tactile sensing systems: Multi-modal tactile sensing systems integrate multiple sensing modalities to provide comprehensive tactile information. These systems combine different sensing principles such as pressure, temperature, vibration, and proximity detection in a single sensor platform. The integration enables more sophisticated tactile perception capabilities similar to human skin. Advanced signal processing and machine learning algorithms are used to interpret the multi-dimensional sensor data. Applications include advanced prosthetics, haptic feedback systems, and intelligent robotic grippers that require rich tactile information for complex manipulation tasks.
02 Piezoresistive tactile sensing mechanisms
Piezoresistive sensors detect tactile information by measuring changes in electrical resistance when mechanical stress or pressure is applied. These sensors typically use conductive materials or composites that change their resistance properties under deformation. The technology enables accurate force and pressure measurement across the sensor surface. Piezoresistive tactile sensors are valued for their simple structure, ease of fabrication, and ability to measure static and dynamic forces. Applications include robotic grippers, prosthetics, and wearable devices.Expand Specific Solutions03 Flexible and stretchable tactile sensor arrays
Flexible and stretchable tactile sensor arrays are designed to conform to curved or irregular surfaces while maintaining sensing capabilities. These sensors utilize flexible substrates and stretchable conductive materials to create sensor arrays that can bend, twist, and stretch without losing functionality. The technology enables tactile sensing on soft robotic systems, electronic skin applications, and wearable health monitoring devices. Advanced fabrication techniques allow for high-density sensor arrays with spatial resolution for detailed tactile mapping.Expand Specific Solutions04 Optical tactile sensing methods
Optical tactile sensing employs light-based detection mechanisms to measure contact, pressure, and deformation. These systems typically use cameras, light sources, and optical markers or patterns to detect changes when objects interact with the sensor surface. The technology can provide high-resolution tactile information and three-dimensional force distribution mapping. Optical methods offer advantages such as immunity to electromagnetic interference and the ability to measure multiple tactile parameters simultaneously. Applications include precision manipulation in robotics and advanced haptic feedback systems.Expand Specific Solutions05 Multi-modal tactile sensing integration
Multi-modal tactile sensing combines different sensing principles and technologies to capture comprehensive tactile information including pressure, temperature, texture, and slip. These integrated systems use multiple sensor types working together to provide rich tactile feedback that mimics human touch perception. The approach enables more sophisticated object recognition, manipulation control, and interaction capabilities. Integration of various sensing modalities allows for robust performance across different environmental conditions and application scenarios. Such systems are particularly valuable in advanced robotics, prosthetics, and virtual reality applications.Expand Specific Solutions
Key Players in Micro-Robotics and Tactile Sensor Industry
The tactile sensing in micro-robotics field represents an emerging technology sector in its early development stage, characterized by significant growth potential but limited commercial maturity. The market remains relatively niche with substantial research investment from leading academic institutions including MIT, Carnegie Mellon University, University of Tokyo, and Zhejiang University driving fundamental breakthroughs. Technology maturity varies considerably across players, with established electronics giants like Samsung Electronics, TDK Corp., and NEC Corp. leveraging existing sensor capabilities, while specialized companies such as Beijing Tashan Technology and Sanctuary Cognitive Systems focus on advanced AI-integrated tactile solutions. Research powerhouses like Toyota Research Institute and KAIST are pioneering biomimetic approaches, though most implementations remain in prototype phases, indicating the technology requires further development before widespread commercial deployment in micro-robotic applications.
TDK Corp.
Technical Solution: TDK has developed commercial-grade tactile sensing solutions specifically designed for micro-robotic applications using their proprietary MEMS-based force sensors. Their technology features ultra-compact sensor packages (2x2x0.5mm) with integrated signal conditioning circuits capable of measuring forces from 0.01N to 10N across three axes. TDK's sensors employ piezoresistive elements fabricated on silicon substrates with temperature compensation and noise reduction capabilities. The company offers complete sensing modules with digital interfaces (I2C/SPI) and power consumption below 1mW, making them suitable for battery-powered micro-robots. Their sensors demonstrate excellent linearity (±0.5% full scale) and long-term stability over 10 million cycles.
Strengths: Commercial availability, compact packaging, low power consumption, proven reliability. Weaknesses: Limited customization options and higher cost compared to research prototypes.
Massachusetts Institute of Technology
Technical Solution: MIT has developed advanced tactile sensing systems for micro-robots using flexible piezoresistive sensors and capacitive touch arrays. Their approach integrates multi-modal sensing capabilities including pressure, texture, and temperature detection into miniaturized packages smaller than 5mm. The technology employs soft lithography techniques to create deformable sensor skins that can conform to curved surfaces while maintaining high sensitivity (detection threshold below 0.1N force). MIT's tactile sensors utilize machine learning algorithms for real-time signal processing and feature extraction, enabling micro-robots to perform delicate manipulation tasks with sub-millimeter precision.
Strengths: High sensitivity and multi-modal sensing capabilities, excellent miniaturization techniques. Weaknesses: Complex manufacturing processes and high computational requirements for signal processing.
Core Innovations in Micro-Scale Tactile Sensing
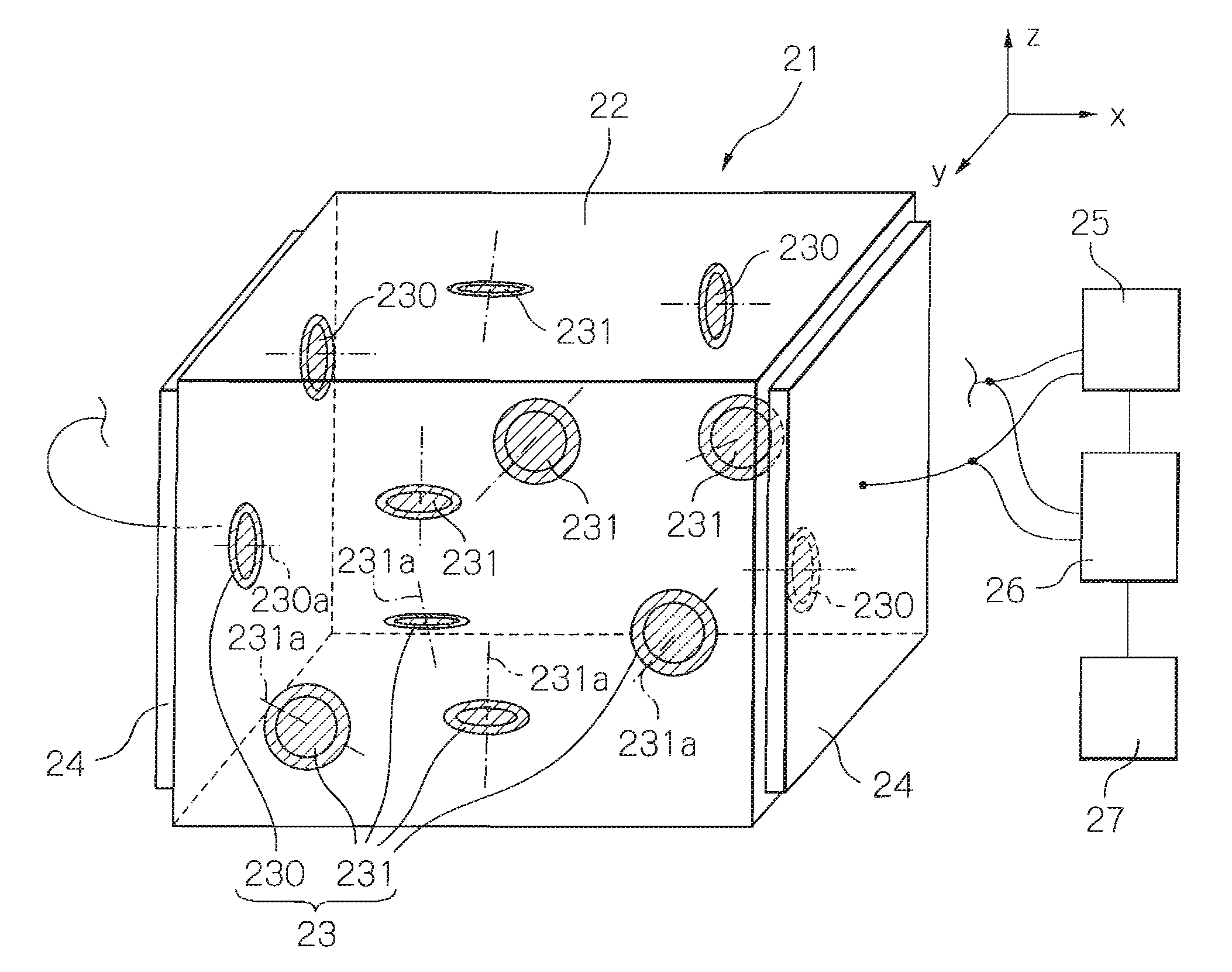
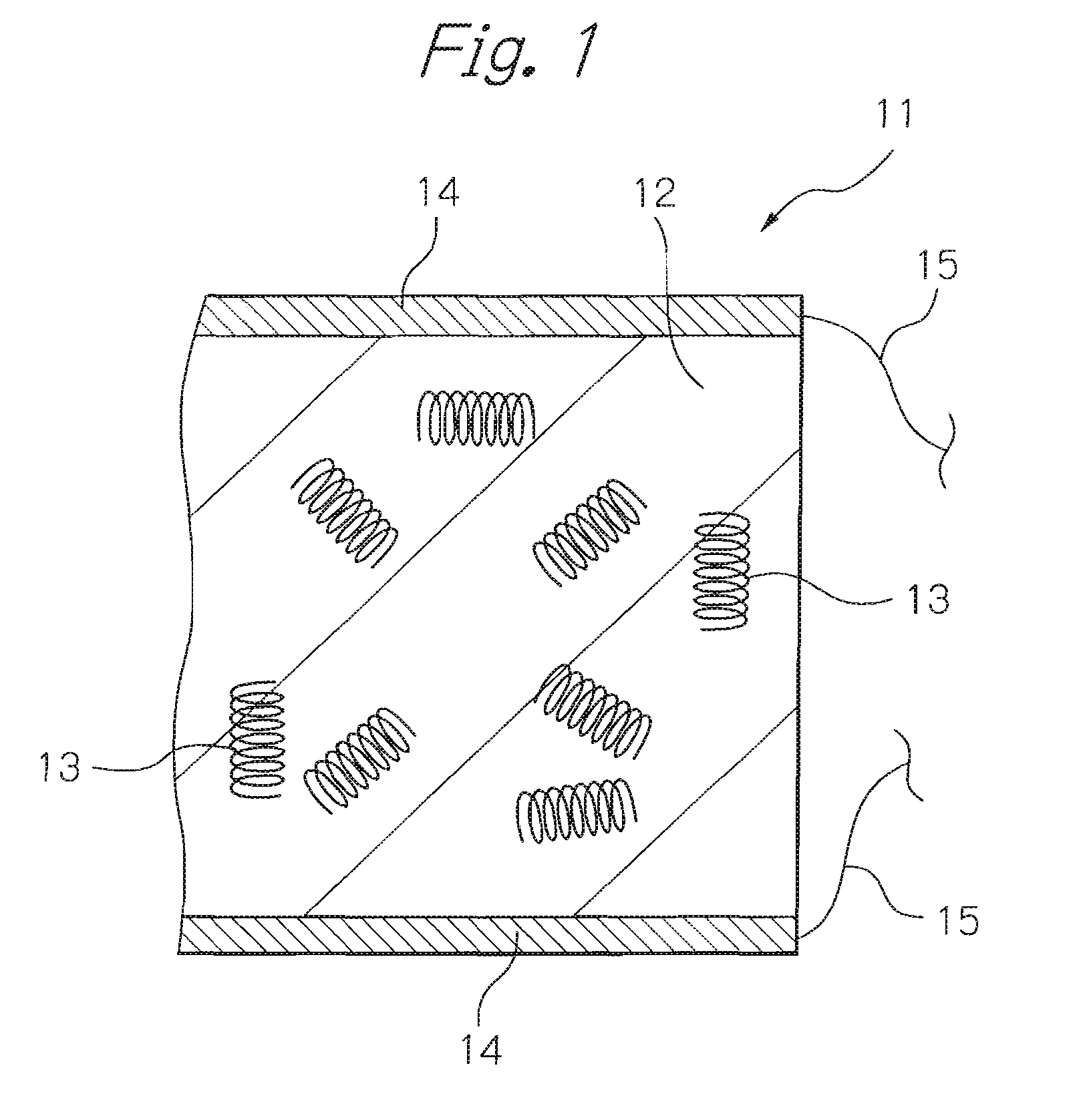
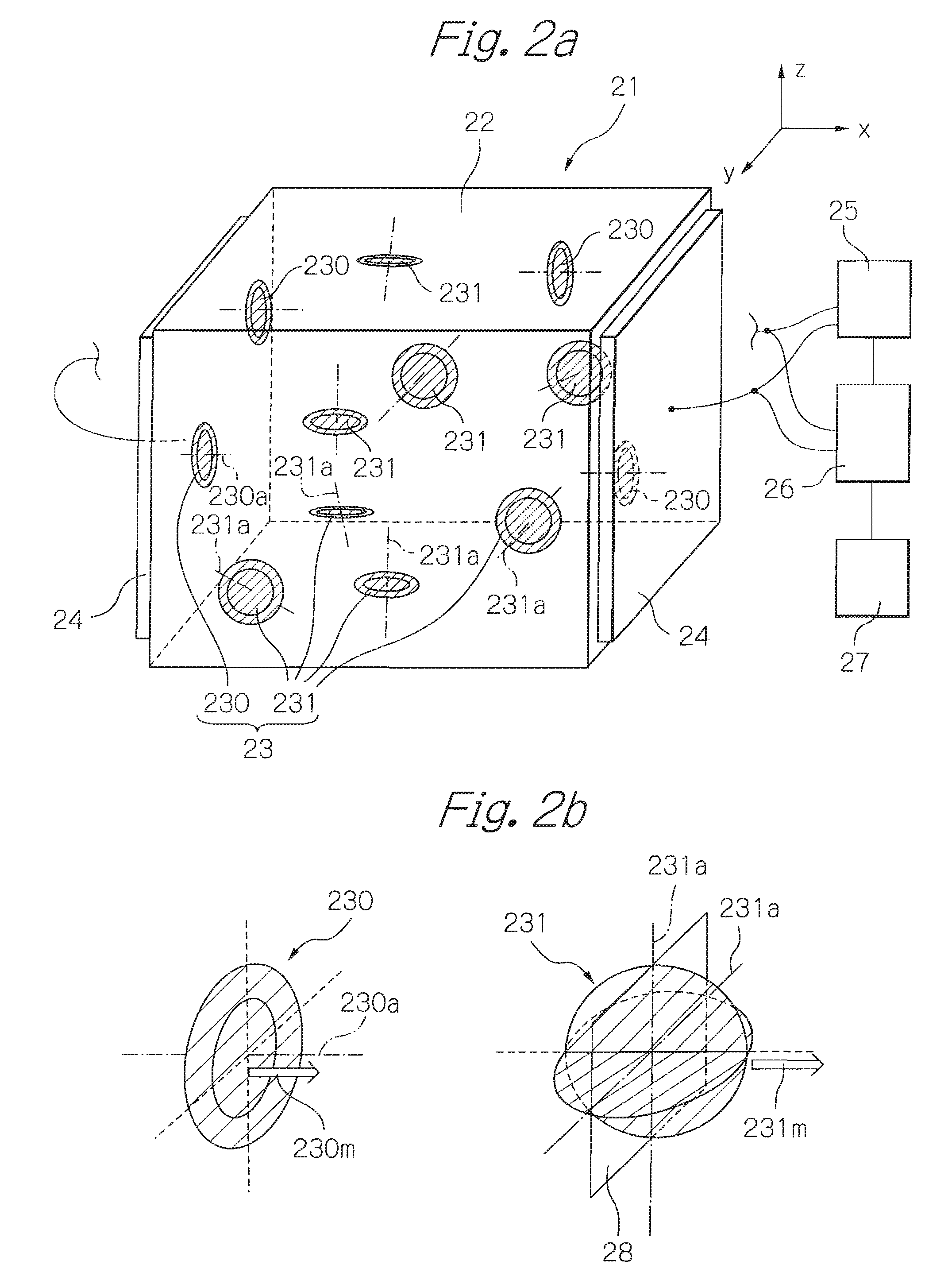
Tactile sensor utilizing microcoils with spiral shape
PatentInactiveUS20090045820A1
Innovation
- A tactile-sensitive material with micro coils having a spiral shape and aligned coil axes, forming an LCR resonance circuit, where the coil axes are directed along specific directions or planes, enhancing the sensitivity by varying the capacitance component significantly and allowing for better modeling of sensor outputs.

Tactile sensor, tactile stimulation detection method using same, and robot skin and robot which comprise same
PatentWO2022030715A1
Innovation
- A tactile sensor with a medium layer containing gas, which transmits vibrations generated by tactile stimulation to spaced-apart microphones, allowing the control unit to determine the location and type of tactile stimulation by analyzing vibration intensity and arrival time, and waveform, enabling efficient detection of dynamic tactile sensations like tapping, rubbing, and slapping.




Manufacturing Constraints for Micro-Scale Integration
The integration of tactile sensing capabilities into micro-robots presents significant manufacturing challenges that fundamentally differ from conventional robotics production. At the micro-scale, traditional manufacturing processes become inadequate, requiring specialized fabrication techniques that can accommodate the dimensional constraints while maintaining functional integrity of sensing components.
Semiconductor fabrication processes, particularly MEMS (Micro-Electro-Mechanical Systems) technology, emerge as the primary manufacturing approach for micro-scale tactile sensors. These processes enable the creation of sensing elements with dimensions ranging from micrometers to millimeters, utilizing photolithography, etching, and deposition techniques. However, the multi-layer nature of tactile sensors introduces complexity in process sequencing and material compatibility, often requiring custom fabrication protocols that deviate from standard semiconductor manufacturing flows.
Material selection becomes critically constrained at micro-scales due to processing limitations and performance requirements. Biocompatible materials such as PDMS (polydimethylsiloxane) and parylene coatings are preferred for sensing surfaces, but their integration with rigid electronic components creates thermal expansion mismatches and adhesion challenges. The selection of piezoresistive materials, such as doped silicon or conductive polymers, must balance sensitivity requirements with manufacturing feasibility and long-term stability.
Assembly and packaging constraints represent major bottlenecks in micro-robot tactile sensing implementation. Traditional wire bonding and soldering techniques become impractical at micro-scales, necessitating alternative interconnection methods such as flip-chip bonding, conductive adhesives, or integrated flexible circuits. The packaging must provide environmental protection while maintaining mechanical compliance for tactile functionality, often requiring custom encapsulation solutions that add significant complexity and cost to the manufacturing process.
Quality control and testing procedures face substantial limitations at micro-scales. Standard electrical testing methods may not adequately verify tactile sensing performance, requiring specialized micro-manipulation equipment and custom test protocols. The statistical validation of sensor performance across production batches becomes challenging due to the difficulty in applying consistent mechanical stimuli at micro-scales, potentially leading to reliability issues in deployed micro-robot systems.
Semiconductor fabrication processes, particularly MEMS (Micro-Electro-Mechanical Systems) technology, emerge as the primary manufacturing approach for micro-scale tactile sensors. These processes enable the creation of sensing elements with dimensions ranging from micrometers to millimeters, utilizing photolithography, etching, and deposition techniques. However, the multi-layer nature of tactile sensors introduces complexity in process sequencing and material compatibility, often requiring custom fabrication protocols that deviate from standard semiconductor manufacturing flows.
Material selection becomes critically constrained at micro-scales due to processing limitations and performance requirements. Biocompatible materials such as PDMS (polydimethylsiloxane) and parylene coatings are preferred for sensing surfaces, but their integration with rigid electronic components creates thermal expansion mismatches and adhesion challenges. The selection of piezoresistive materials, such as doped silicon or conductive polymers, must balance sensitivity requirements with manufacturing feasibility and long-term stability.
Assembly and packaging constraints represent major bottlenecks in micro-robot tactile sensing implementation. Traditional wire bonding and soldering techniques become impractical at micro-scales, necessitating alternative interconnection methods such as flip-chip bonding, conductive adhesives, or integrated flexible circuits. The packaging must provide environmental protection while maintaining mechanical compliance for tactile functionality, often requiring custom encapsulation solutions that add significant complexity and cost to the manufacturing process.
Quality control and testing procedures face substantial limitations at micro-scales. Standard electrical testing methods may not adequately verify tactile sensing performance, requiring specialized micro-manipulation equipment and custom test protocols. The statistical validation of sensor performance across production batches becomes challenging due to the difficulty in applying consistent mechanical stimuli at micro-scales, potentially leading to reliability issues in deployed micro-robot systems.
Power Management Solutions for Tactile Micro-Systems
Power management represents one of the most critical engineering challenges in tactile micro-robotic systems, where energy constraints directly impact sensing performance, operational duration, and overall system reliability. The miniaturized nature of these systems demands innovative approaches to energy harvesting, storage, and distribution that fundamentally differ from conventional robotic power architectures.
Energy harvesting technologies have emerged as primary solutions for sustainable tactile micro-systems operation. Piezoelectric energy harvesting shows particular promise, converting mechanical deformation from tactile interactions directly into electrical energy. Recent developments in flexible piezoelectric materials, including PVDF and zinc oxide nanowires, enable integration within tactile sensor arrays while simultaneously powering the sensing circuitry. Electromagnetic induction harvesting offers alternative approaches, particularly effective in dynamic environments where micro-robots experience continuous motion.
Ultra-low power circuit design forms the foundation of effective power management strategies. Advanced power gating techniques allow selective activation of tactile sensing modules based on operational requirements, reducing standby power consumption by up to 90%. Dynamic voltage scaling adapts power supply levels to match real-time processing demands, while clock gating minimizes unnecessary switching activities in digital processing units.
Energy storage solutions must balance capacity constraints with size limitations inherent in micro-robotic platforms. Thin-film batteries and supercapacitors provide viable options, with recent advances in solid-state electrolytes enabling safer, more compact energy storage. Hybrid storage systems combining batteries for sustained operation with supercapacitors for peak power demands optimize both energy density and power delivery characteristics.
Wireless power transfer technologies offer supplementary charging capabilities for tactile micro-systems. Near-field magnetic coupling enables efficient power transmission over short distances, particularly useful for swarm robotics applications where individual units can share energy resources. Radio frequency energy harvesting from ambient electromagnetic fields provides continuous low-level charging, extending operational periods between active charging cycles.
Power distribution networks within micro-robotic systems require careful optimization to minimize resistive losses while maintaining signal integrity for tactile data transmission. Multi-rail power architectures separate analog sensing circuits from digital processing units, reducing noise interference and improving measurement accuracy. Integrated power management units coordinate energy flow between harvesting sources, storage elements, and load circuits, implementing intelligent switching algorithms that maximize system efficiency while ensuring continuous tactile sensing capabilities.
Energy harvesting technologies have emerged as primary solutions for sustainable tactile micro-systems operation. Piezoelectric energy harvesting shows particular promise, converting mechanical deformation from tactile interactions directly into electrical energy. Recent developments in flexible piezoelectric materials, including PVDF and zinc oxide nanowires, enable integration within tactile sensor arrays while simultaneously powering the sensing circuitry. Electromagnetic induction harvesting offers alternative approaches, particularly effective in dynamic environments where micro-robots experience continuous motion.
Ultra-low power circuit design forms the foundation of effective power management strategies. Advanced power gating techniques allow selective activation of tactile sensing modules based on operational requirements, reducing standby power consumption by up to 90%. Dynamic voltage scaling adapts power supply levels to match real-time processing demands, while clock gating minimizes unnecessary switching activities in digital processing units.
Energy storage solutions must balance capacity constraints with size limitations inherent in micro-robotic platforms. Thin-film batteries and supercapacitors provide viable options, with recent advances in solid-state electrolytes enabling safer, more compact energy storage. Hybrid storage systems combining batteries for sustained operation with supercapacitors for peak power demands optimize both energy density and power delivery characteristics.
Wireless power transfer technologies offer supplementary charging capabilities for tactile micro-systems. Near-field magnetic coupling enables efficient power transmission over short distances, particularly useful for swarm robotics applications where individual units can share energy resources. Radio frequency energy harvesting from ambient electromagnetic fields provides continuous low-level charging, extending operational periods between active charging cycles.
Power distribution networks within micro-robotic systems require careful optimization to minimize resistive losses while maintaining signal integrity for tactile data transmission. Multi-rail power architectures separate analog sensing circuits from digital processing units, reducing noise interference and improving measurement accuracy. Integrated power management units coordinate energy flow between harvesting sources, storage elements, and load circuits, implementing intelligent switching algorithms that maximize system efficiency while ensuring continuous tactile sensing capabilities.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!