Biomimetic Actuators in Tiny Robotics: Power Solutions
APR 20, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Biomimetic Actuator Development Background and Objectives
The field of biomimetic actuators represents a revolutionary convergence of biological inspiration and engineering innovation, drawing from millions of years of evolutionary optimization found in natural systems. This interdisciplinary domain emerged from the recognition that biological organisms have developed remarkably efficient mechanisms for movement, sensing, and energy conversion at microscopic scales. The miniaturization demands of modern robotics have intensified interest in replicating these natural phenomena to create artificial systems capable of precise, efficient operation in constrained environments.
Historical development of biomimetic actuators began with early observations of muscle fiber mechanics in the 1950s, progressing through electroactive polymer discoveries in the 1990s, to contemporary advances in molecular motors and smart materials. The evolution has been marked by increasing sophistication in understanding biological mechanisms such as sarcomere contraction, flagellar rotation, and ciliary beating patterns. These insights have translated into engineering applications ranging from medical microrobots to environmental monitoring systems.
The technological trajectory has consistently moved toward smaller scales, higher efficiency, and greater functional integration. Early pneumatic and electromagnetic actuators gave way to shape memory alloys, piezoelectric materials, and electroactive polymers. Recent breakthroughs in ionic polymer-metal composites and conducting polymers have opened new possibilities for biomimetic actuation at the microscale, where traditional electromagnetic approaches become increasingly inefficient due to scaling laws.
Current objectives center on achieving power densities comparable to biological systems while maintaining controllability and reliability. Biological muscles generate approximately 300 watts per kilogram, setting a benchmark that synthetic actuators strive to match. The challenge intensifies at microscales where surface forces dominate and conventional power transmission methods become impractical. Primary goals include developing actuators that can operate continuously for extended periods, respond rapidly to control signals, and integrate seamlessly with miniaturized power sources and control electronics.
The ultimate vision encompasses autonomous microrobotic systems capable of performing complex tasks in challenging environments, from targeted drug delivery within the human body to environmental remediation at the cellular level. Success requires overcoming fundamental challenges in power density, energy storage, and system integration while maintaining the robustness and adaptability that characterize their biological counterparts.
Historical development of biomimetic actuators began with early observations of muscle fiber mechanics in the 1950s, progressing through electroactive polymer discoveries in the 1990s, to contemporary advances in molecular motors and smart materials. The evolution has been marked by increasing sophistication in understanding biological mechanisms such as sarcomere contraction, flagellar rotation, and ciliary beating patterns. These insights have translated into engineering applications ranging from medical microrobots to environmental monitoring systems.
The technological trajectory has consistently moved toward smaller scales, higher efficiency, and greater functional integration. Early pneumatic and electromagnetic actuators gave way to shape memory alloys, piezoelectric materials, and electroactive polymers. Recent breakthroughs in ionic polymer-metal composites and conducting polymers have opened new possibilities for biomimetic actuation at the microscale, where traditional electromagnetic approaches become increasingly inefficient due to scaling laws.
Current objectives center on achieving power densities comparable to biological systems while maintaining controllability and reliability. Biological muscles generate approximately 300 watts per kilogram, setting a benchmark that synthetic actuators strive to match. The challenge intensifies at microscales where surface forces dominate and conventional power transmission methods become impractical. Primary goals include developing actuators that can operate continuously for extended periods, respond rapidly to control signals, and integrate seamlessly with miniaturized power sources and control electronics.
The ultimate vision encompasses autonomous microrobotic systems capable of performing complex tasks in challenging environments, from targeted drug delivery within the human body to environmental remediation at the cellular level. Success requires overcoming fundamental challenges in power density, energy storage, and system integration while maintaining the robustness and adaptability that characterize their biological counterparts.
Market Demand for Miniaturized Robotic Systems
The global miniaturized robotics market is experiencing unprecedented growth driven by diverse applications across multiple industries. Medical applications represent the largest segment, with micro-robots enabling minimally invasive surgeries, targeted drug delivery, and diagnostic procedures within the human body. These applications demand extremely small form factors while maintaining precise control and sufficient power for extended operations.
Industrial automation increasingly relies on miniaturized robotic systems for precision manufacturing, quality inspection, and assembly of microelectronics. The semiconductor industry particularly benefits from tiny robots capable of handling delicate components and performing tasks in confined spaces where traditional automation fails. These systems require high-precision actuators with reliable power solutions to maintain operational accuracy.
Consumer electronics markets show growing interest in miniaturized robotics for smart home devices, wearable technology, and personal assistance applications. The integration of tiny robots into everyday products creates demand for biomimetic actuators that can operate efficiently within strict power and size constraints while delivering natural, life-like movements.
Environmental monitoring and exploration applications drive demand for swarm robotics systems comprising numerous miniaturized units. These applications require robots capable of autonomous operation in challenging environments, necessitating robust power solutions that can sustain extended missions without external charging infrastructure.
The aerospace and defense sectors increasingly adopt miniaturized robotic systems for reconnaissance, surveillance, and maintenance operations in space environments. These applications demand highly reliable actuator systems capable of operating under extreme conditions while maintaining minimal power consumption profiles.
Market growth is further accelerated by advances in materials science, enabling the development of more efficient biomimetic actuators that closely replicate natural muscle movements. The convergence of artificial intelligence, advanced materials, and miniaturization technologies creates expanding opportunities for innovative power solutions in tiny robotics applications across emerging market segments.
Industrial automation increasingly relies on miniaturized robotic systems for precision manufacturing, quality inspection, and assembly of microelectronics. The semiconductor industry particularly benefits from tiny robots capable of handling delicate components and performing tasks in confined spaces where traditional automation fails. These systems require high-precision actuators with reliable power solutions to maintain operational accuracy.
Consumer electronics markets show growing interest in miniaturized robotics for smart home devices, wearable technology, and personal assistance applications. The integration of tiny robots into everyday products creates demand for biomimetic actuators that can operate efficiently within strict power and size constraints while delivering natural, life-like movements.
Environmental monitoring and exploration applications drive demand for swarm robotics systems comprising numerous miniaturized units. These applications require robots capable of autonomous operation in challenging environments, necessitating robust power solutions that can sustain extended missions without external charging infrastructure.
The aerospace and defense sectors increasingly adopt miniaturized robotic systems for reconnaissance, surveillance, and maintenance operations in space environments. These applications demand highly reliable actuator systems capable of operating under extreme conditions while maintaining minimal power consumption profiles.
Market growth is further accelerated by advances in materials science, enabling the development of more efficient biomimetic actuators that closely replicate natural muscle movements. The convergence of artificial intelligence, advanced materials, and miniaturization technologies creates expanding opportunities for innovative power solutions in tiny robotics applications across emerging market segments.
Current Power Limitations in Micro-Scale Biomimetic Actuators
Micro-scale biomimetic actuators face fundamental power limitations that significantly constrain their operational capabilities and practical applications in tiny robotics. The primary challenge stems from the unfavorable scaling laws that govern energy storage and power generation at microscopic dimensions. As actuator size decreases, the surface-area-to-volume ratio increases dramatically, leading to higher relative power losses through surface effects while simultaneously reducing the available volume for energy storage components.
Energy density represents a critical bottleneck in current micro-actuator systems. Conventional battery technologies exhibit poor performance at micro-scales due to manufacturing constraints and material limitations. Lithium-ion batteries, while effective at larger scales, suffer from reduced capacity and increased internal resistance when miniaturized below millimeter dimensions. The packaging overhead becomes disproportionately large relative to the active material volume, resulting in energy densities that are often insufficient for sustained operation.
Power delivery mechanisms present additional constraints in biomimetic micro-actuators. The electrical resistance of microscopic conductors increases significantly due to size effects and surface scattering phenomena. This leads to substantial I²R losses during power transmission, reducing overall system efficiency. Furthermore, the thermal management becomes increasingly challenging as heat dissipation pathways are limited by the small thermal mass and reduced surface area available for heat transfer.
Actuation efficiency represents another major limitation affecting power requirements. Many biomimetic actuators rely on electroactive polymers, shape memory alloys, or piezoelectric materials that exhibit relatively low energy conversion efficiencies. These materials often require high driving voltages or currents, placing additional demands on the power supply system. The mismatch between available power and actuation requirements frequently results in compromised performance or severely limited operational duration.
Wireless power transfer, while offering potential solutions for untethered operation, faces significant challenges at micro-scales. The coupling efficiency between transmitter and receiver coils decreases rapidly with miniaturization due to reduced coil dimensions and quality factors. Additionally, the power transfer distance becomes severely limited, restricting the operational range of micro-robotic systems.
Current manufacturing processes further exacerbate power limitations by introducing parasitic resistances and capacitances that were negligible at larger scales. The precision required for micro-scale fabrication often results in non-ideal component characteristics that increase power consumption beyond theoretical predictions. These manufacturing-induced limitations compound the fundamental scaling challenges, creating a complex optimization problem for micro-actuator designers.
Energy density represents a critical bottleneck in current micro-actuator systems. Conventional battery technologies exhibit poor performance at micro-scales due to manufacturing constraints and material limitations. Lithium-ion batteries, while effective at larger scales, suffer from reduced capacity and increased internal resistance when miniaturized below millimeter dimensions. The packaging overhead becomes disproportionately large relative to the active material volume, resulting in energy densities that are often insufficient for sustained operation.
Power delivery mechanisms present additional constraints in biomimetic micro-actuators. The electrical resistance of microscopic conductors increases significantly due to size effects and surface scattering phenomena. This leads to substantial I²R losses during power transmission, reducing overall system efficiency. Furthermore, the thermal management becomes increasingly challenging as heat dissipation pathways are limited by the small thermal mass and reduced surface area available for heat transfer.
Actuation efficiency represents another major limitation affecting power requirements. Many biomimetic actuators rely on electroactive polymers, shape memory alloys, or piezoelectric materials that exhibit relatively low energy conversion efficiencies. These materials often require high driving voltages or currents, placing additional demands on the power supply system. The mismatch between available power and actuation requirements frequently results in compromised performance or severely limited operational duration.
Wireless power transfer, while offering potential solutions for untethered operation, faces significant challenges at micro-scales. The coupling efficiency between transmitter and receiver coils decreases rapidly with miniaturization due to reduced coil dimensions and quality factors. Additionally, the power transfer distance becomes severely limited, restricting the operational range of micro-robotic systems.
Current manufacturing processes further exacerbate power limitations by introducing parasitic resistances and capacitances that were negligible at larger scales. The precision required for micro-scale fabrication often results in non-ideal component characteristics that increase power consumption beyond theoretical predictions. These manufacturing-induced limitations compound the fundamental scaling challenges, creating a complex optimization problem for micro-actuator designers.
Existing Power Solutions for Miniature Biomimetic Actuators
01 Electroactive polymer-based actuators
Biomimetic actuators can be powered using electroactive polymers that change shape or size when electrical voltage is applied. These materials enable artificial muscle-like movements by converting electrical energy directly into mechanical motion. The polymers can be configured in various arrangements to achieve different types of actuation, including bending, stretching, and contraction motions similar to biological muscles.- Electroactive polymer-based biomimetic actuators: Biomimetic actuators can be powered using electroactive polymers that change shape or size when electrical voltage is applied. These materials mimic natural muscle movements and can be configured in various arrangements to achieve desired actuation patterns. The power systems for these actuators typically involve controlled electrical stimulation that enables precise movement control and energy-efficient operation.
- Hydraulic and pneumatic power systems for biomimetic actuators: Biomimetic actuators can utilize hydraulic or pneumatic power systems that replicate biological muscle function through fluid pressure control. These systems employ pressurized fluids or gases to generate mechanical motion, offering high force output and smooth operation. The power delivery mechanisms can be designed to provide variable force and speed characteristics similar to natural biological systems.
- Shape memory alloy actuator power mechanisms: Shape memory alloys can be employed as power sources for biomimetic actuators, utilizing thermal or electrical energy to induce phase transformations that generate mechanical work. These materials can return to predetermined shapes when activated, providing compact and lightweight actuation solutions. The power systems are designed to efficiently heat and cool the alloy materials to achieve cyclic actuation.
- Battery and energy storage systems for autonomous biomimetic actuators: Autonomous biomimetic actuators require integrated power sources such as rechargeable batteries, supercapacitors, or hybrid energy storage systems. These power solutions enable untethered operation and can be optimized for weight, capacity, and recharge cycles. Advanced power management circuits regulate energy distribution to maximize operational duration and performance efficiency.
- Biofuel and chemical energy conversion for biomimetic actuators: Biomimetic actuators can be powered through chemical energy conversion systems that mimic biological energy metabolism. These systems may utilize fuel cells, enzymatic reactions, or other biochemical processes to generate electrical or mechanical energy. The power generation approach allows for sustained operation using renewable or biological fuel sources, closely replicating natural energy systems.
02 Pneumatic and hydraulic power systems
Biomimetic actuators can utilize compressed air or fluid pressure to generate movement that mimics biological systems. These power systems provide high force output and can be precisely controlled through valve mechanisms. The pneumatic or hydraulic approach allows for compliant and adaptive movements similar to natural organisms, making them suitable for soft robotics applications.Expand Specific Solutions03 Shape memory alloy actuation
Shape memory alloys can be employed as power sources for biomimetic actuators by utilizing their ability to return to a predetermined shape when heated. These materials undergo phase transformation that generates significant force and displacement. The actuation can be triggered through electrical resistance heating or environmental temperature changes, providing a compact and efficient power solution.Expand Specific Solutions04 Electromagnetic and motor-driven systems
Traditional electromagnetic motors and solenoids can be adapted to power biomimetic actuators through mechanical linkages and transmission systems. These systems convert rotational or linear electromagnetic motion into biomimetic movements through gear systems, cam mechanisms, or direct drive configurations. The approach offers precise control and high power density for various actuation requirements.Expand Specific Solutions05 Chemical and biological energy conversion
Biomimetic actuators can be powered through chemical reactions or biological processes that convert chemical energy into mechanical work. These systems may utilize fuel cells, chemical gradients, or bio-hybrid approaches that integrate living cells with synthetic materials. Such power sources enable autonomous operation and can provide sustained actuation in environments where traditional power sources are impractical.Expand Specific Solutions
Key Players in Biomimetic Actuator and Micro-Robotics Industry
The biomimetic actuators in tiny robotics field represents an emerging technology sector in its early development stage, characterized by significant research activity but limited commercial deployment. The market remains nascent with substantial growth potential as miniaturization demands increase across medical and industrial applications. Technology maturity varies considerably among key players, with established corporations like Koninklijke Philips NV, Boston Scientific Neuromodulation Corp., and Olympus Corp. leveraging their medical device expertise to advance power-efficient micro-actuator solutions. Leading research institutions including Massachusetts Institute of Technology, Shanghai Jiao Tong University, and École Polytechnique Fédérale de Lausanne are driving fundamental breakthroughs in biomimetic design principles and energy harvesting mechanisms. Specialized robotics companies such as Shanghai Fourier Technology Co. Ltd. and Cloudminds Shanghai Robotics Co Ltd. are translating academic research into practical applications, while technology giants like Hitachi Ltd. contribute advanced materials and manufacturing capabilities essential for scalable production of these sophisticated micro-systems.
Massachusetts Institute of Technology
Technical Solution: MIT has developed advanced biomimetic actuators using artificial muscle fibers based on twisted and coiled polymer actuators that can contract up to 49% of their length while generating significant force. Their power solutions incorporate hybrid energy systems combining lithium-ion batteries with supercapacitors for burst power delivery. The research team has created wireless power transfer systems operating at high frequencies to minimize power loss during transmission. Their cheetah-inspired robots demonstrate efficient locomotion through optimized actuator placement and power management algorithms that reduce energy consumption by up to 40% compared to traditional servo motors.
Strengths: Cutting-edge artificial muscle technology, efficient power management systems, strong research capabilities with practical demonstrations. Weaknesses: Technology still in research phase, complex manufacturing processes, limited battery life for extended operations.
President & Fellows of Harvard College
Technical Solution: Harvard has developed innovative biomimetic actuators for tiny robotics using shape memory alloy (SMA) wires and electroactive polymers. Their research focuses on creating muscle-like actuators that can generate high force-to-weight ratios while consuming minimal power. The team has pioneered wireless power transmission systems using electromagnetic induction and piezoelectric energy harvesting for micro-robots. Their RoboBee project demonstrates untethered flight capabilities through advanced power management circuits that optimize energy consumption during different flight phases. The integration of photovoltaic cells with ultra-lightweight designs enables sustained operation in controlled environments.
Strengths: Leading research institution with breakthrough innovations in micro-robotics, excellent force-to-weight ratio actuators, proven untethered flight capabilities. Weaknesses: Limited commercial scalability, high manufacturing costs, power solutions still constrained for extended autonomous operation.
Core Power Technologies for Micro-Scale Actuation Systems
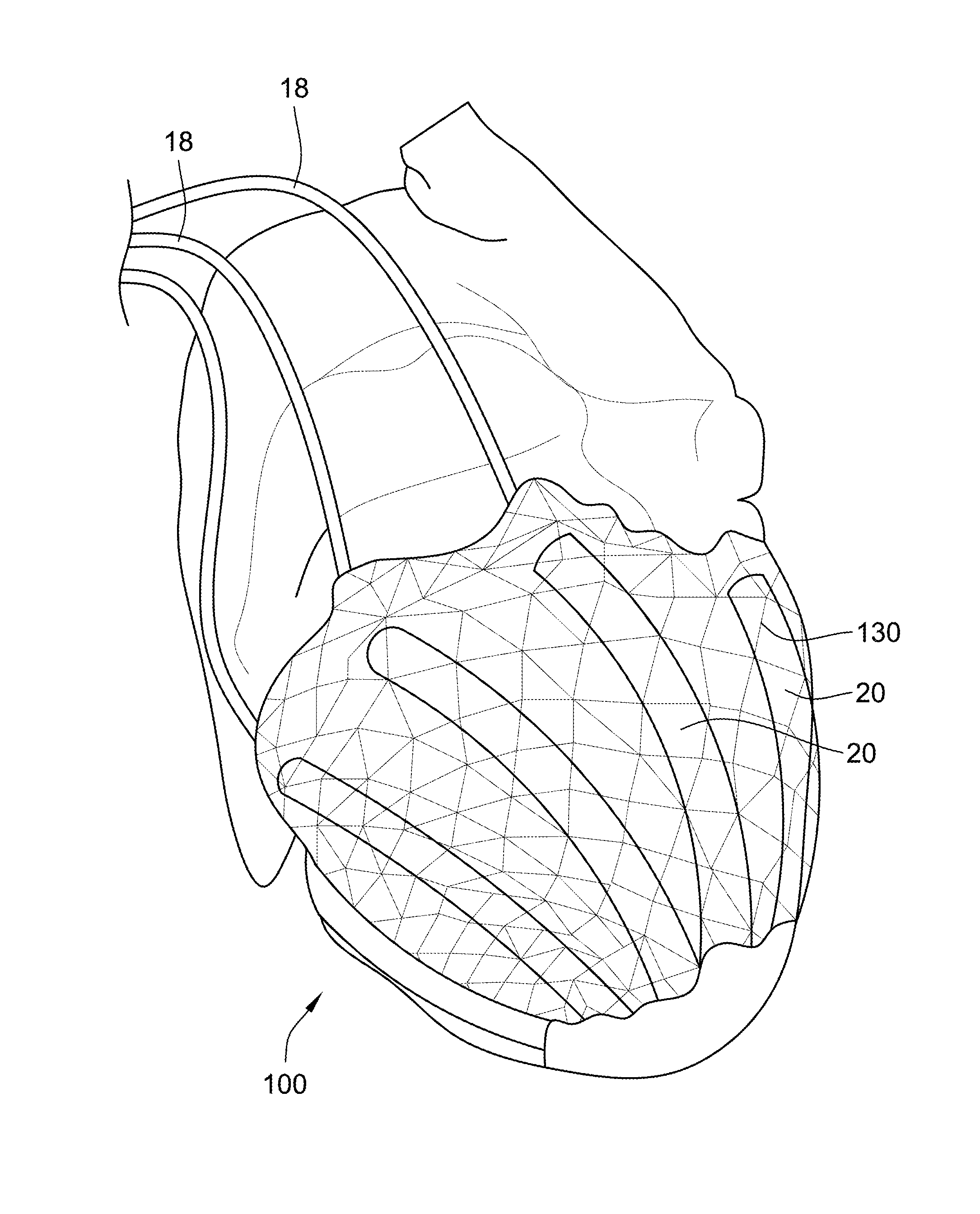
Biomimetic actuation device and system, and methods for controlling a biomimetic actuation device and system
PatentActiveUS20160346449A1
Innovation
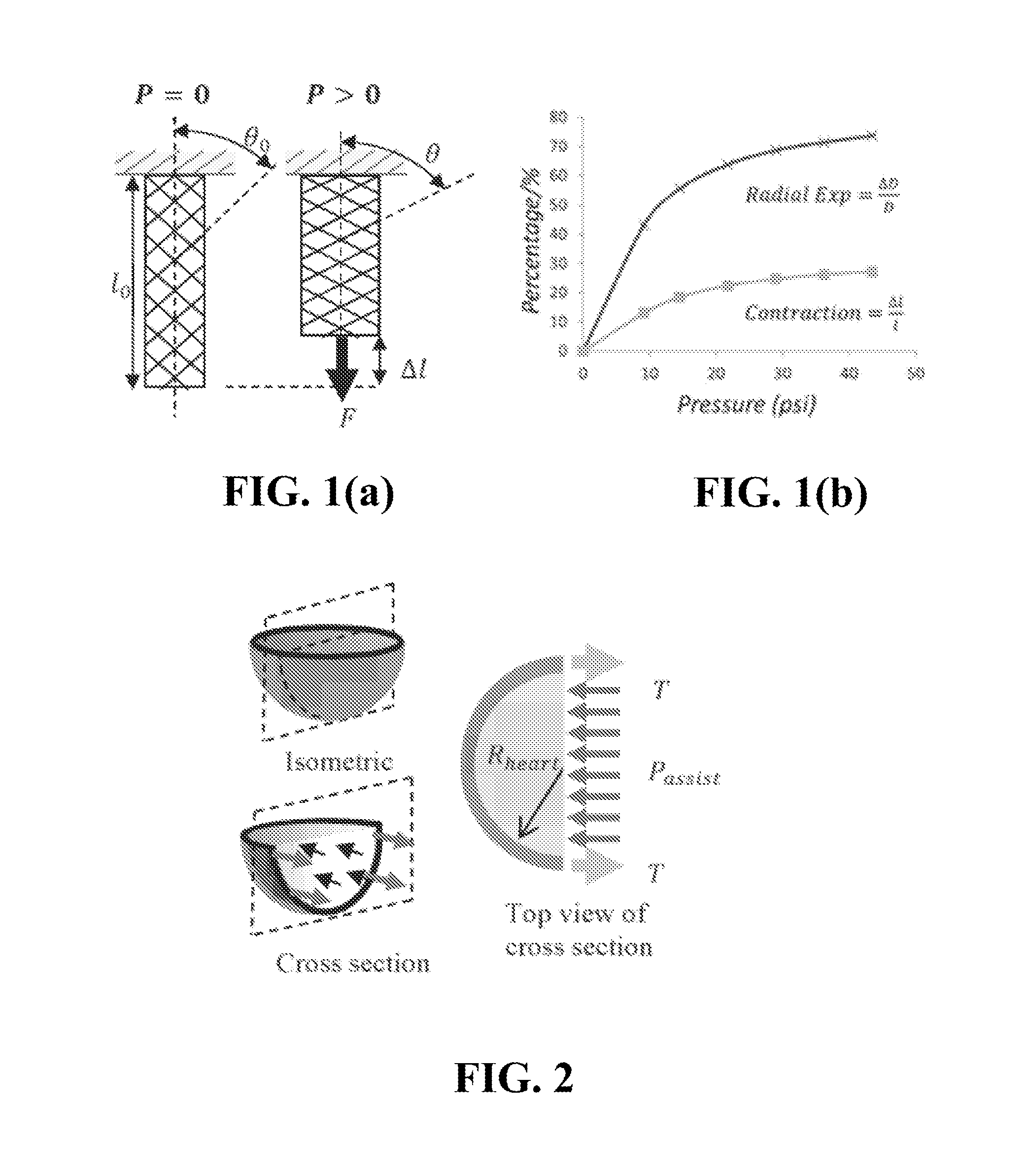
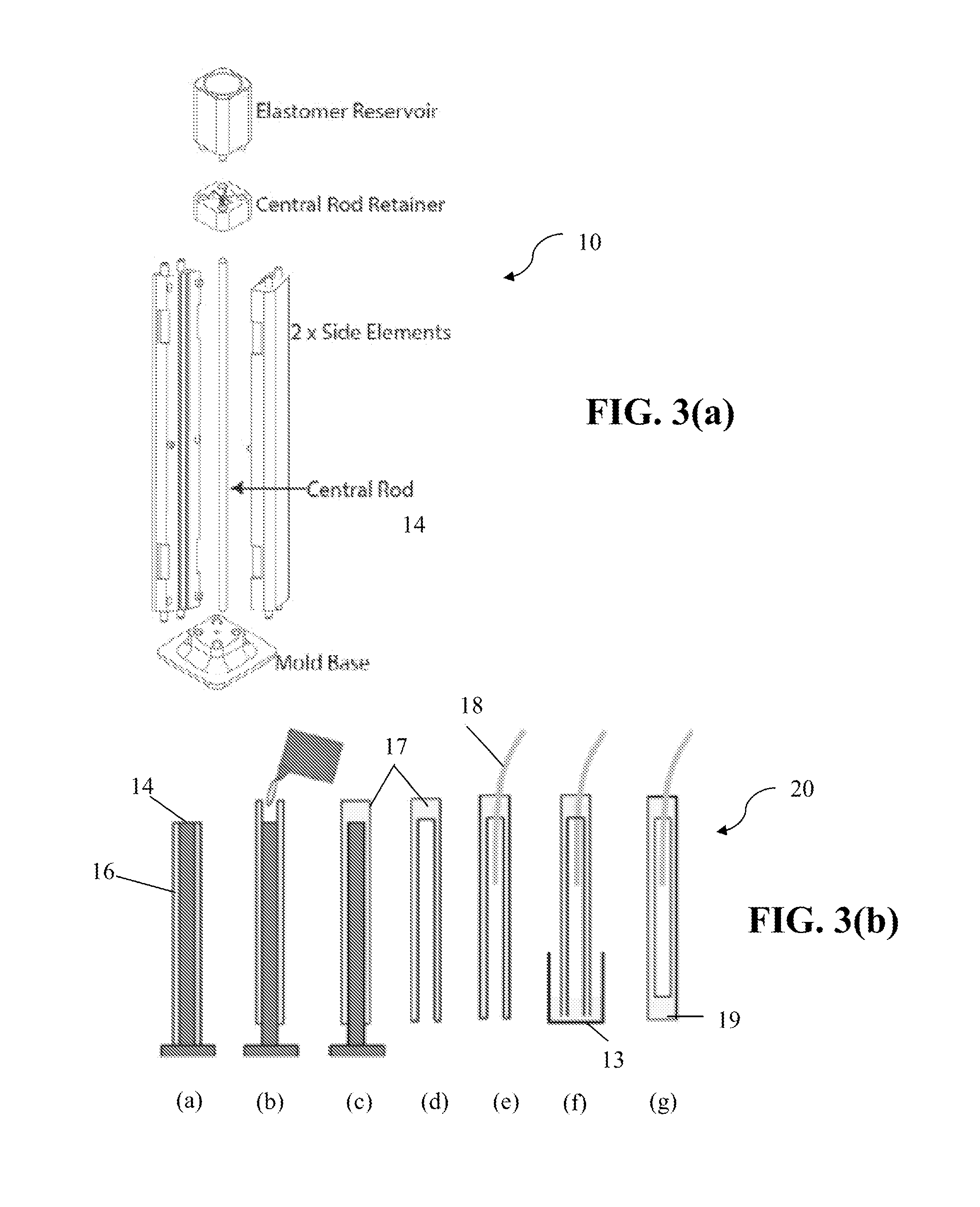
- Development of biomimetic DCC devices using soft pneumatic artificial muscles (PAMs) with low threshold pressures and soft ends, oriented in a helical and circumferential fashion to replicate cardiac motion, providing synchronized mechanical assistance during both systolic and diastolic phases without contacting blood, thus reducing the need for anticoagulation and minimizing trauma.

Method for preparing paper that is useful in biomimetic electro-active paper actuators
PatentInactiveUS20100319867A1
Innovation
- Development of ultra-lightweight biomimetic electro-active paper (EAPap) actuators made from cellulose paper with aligned micro fibrils and electrodes, capable of deformation via electric fields, and powered remotely using microwave energy, eliminating the need for internal batteries and reducing power consumption.




Safety Standards for Miniaturized Robotic Power Systems
The development of safety standards for miniaturized robotic power systems represents a critical frontier in ensuring the reliable and secure operation of biomimetic actuators in tiny robotics. As these systems become increasingly sophisticated and autonomous, establishing comprehensive safety protocols becomes paramount to prevent potential hazards ranging from thermal runaway to electromagnetic interference.
Current safety frameworks for miniaturized power systems primarily focus on battery management protocols, thermal regulation, and fail-safe mechanisms. The IEEE 1725 standard provides foundational guidelines for rechargeable batteries in portable applications, while IEC 62133 addresses safety requirements for portable sealed secondary cells. However, these existing standards require significant adaptation to address the unique challenges posed by biomimetic actuators operating at microscale dimensions.
The miniaturization of robotic power systems introduces novel safety considerations that traditional standards inadequately address. Power density constraints in tiny robotics create heightened risks of localized heating, potentially damaging delicate biomimetic structures. Additionally, the integration of biological-inspired materials with electronic components necessitates biocompatibility assessments and long-term stability evaluations under varying environmental conditions.
Emerging safety protocols specifically target voltage regulation in constrained spaces, where traditional protection circuits may be impractical due to size limitations. Advanced monitoring systems utilizing distributed sensor networks enable real-time assessment of power system health, detecting anomalies before they escalate into safety hazards. These systems incorporate predictive algorithms that analyze power consumption patterns and identify potential failure modes.
International standardization bodies are actively developing specialized guidelines for miniaturized robotic applications. The proposed ISO/IEC 30071 standard framework addresses safety requirements for autonomous micro-robots, including power system isolation, emergency shutdown procedures, and environmental containment protocols. These standards emphasize redundant safety mechanisms and graceful degradation strategies to maintain operational safety even during component failures.
Future safety standard development will likely incorporate machine learning-based risk assessment models and adaptive safety protocols that evolve with system behavior. The integration of biomimetic design principles with robust safety frameworks will enable the deployment of increasingly sophisticated tiny robotic systems while maintaining stringent safety requirements across diverse operational environments.
Current safety frameworks for miniaturized power systems primarily focus on battery management protocols, thermal regulation, and fail-safe mechanisms. The IEEE 1725 standard provides foundational guidelines for rechargeable batteries in portable applications, while IEC 62133 addresses safety requirements for portable sealed secondary cells. However, these existing standards require significant adaptation to address the unique challenges posed by biomimetic actuators operating at microscale dimensions.
The miniaturization of robotic power systems introduces novel safety considerations that traditional standards inadequately address. Power density constraints in tiny robotics create heightened risks of localized heating, potentially damaging delicate biomimetic structures. Additionally, the integration of biological-inspired materials with electronic components necessitates biocompatibility assessments and long-term stability evaluations under varying environmental conditions.
Emerging safety protocols specifically target voltage regulation in constrained spaces, where traditional protection circuits may be impractical due to size limitations. Advanced monitoring systems utilizing distributed sensor networks enable real-time assessment of power system health, detecting anomalies before they escalate into safety hazards. These systems incorporate predictive algorithms that analyze power consumption patterns and identify potential failure modes.
International standardization bodies are actively developing specialized guidelines for miniaturized robotic applications. The proposed ISO/IEC 30071 standard framework addresses safety requirements for autonomous micro-robots, including power system isolation, emergency shutdown procedures, and environmental containment protocols. These standards emphasize redundant safety mechanisms and graceful degradation strategies to maintain operational safety even during component failures.
Future safety standard development will likely incorporate machine learning-based risk assessment models and adaptive safety protocols that evolve with system behavior. The integration of biomimetic design principles with robust safety frameworks will enable the deployment of increasingly sophisticated tiny robotic systems while maintaining stringent safety requirements across diverse operational environments.
Bio-Inspired Energy Harvesting for Autonomous Micro-Robots
Bio-inspired energy harvesting represents a paradigm shift in powering autonomous micro-robots, drawing inspiration from nature's most efficient energy conversion mechanisms. Natural systems have evolved sophisticated strategies to capture, convert, and store energy from environmental sources, offering valuable blueprints for miniaturized robotic applications. These biological models demonstrate remarkable efficiency in energy utilization, often operating with minimal power requirements while maintaining complex functionalities.
Photosynthetic energy harvesting mimics plant chloroplasts to convert ambient light into electrical energy for micro-robotic systems. Advanced photovoltaic cells integrated at microscale dimensions can achieve power densities sufficient for basic locomotion and sensing operations. Recent developments in organic photovoltaics and perovskite solar cells have enabled flexible, lightweight energy harvesting modules that can be seamlessly integrated into micro-robot architectures without compromising mobility or functionality.
Piezoelectric energy harvesting exploits mechanical vibrations and deformations, similar to how certain marine organisms generate bioelectricity through muscular contractions. Micro-scale piezoelectric generators can capture energy from environmental vibrations, robot locomotion, or deliberate mechanical stimulation. These systems demonstrate particular promise in applications where micro-robots operate in dynamic environments with consistent mechanical energy sources.
Thermoelectric energy conversion leverages temperature gradients, inspired by thermophilic organisms that thrive in temperature-variable environments. Miniaturized thermoelectric generators can harvest energy from ambient temperature differences, body heat, or thermal variations in operational environments. The integration of advanced thermoelectric materials enables continuous power generation even in relatively small temperature differentials.
Electrochemical energy harvesting draws inspiration from biological fuel cells found in living organisms. Micro-fuel cells can utilize environmental chemicals, organic compounds, or even biological fluids as energy sources. These bio-inspired systems offer extended operational periods and can potentially achieve energy autonomy in environments rich in suitable chemical substrates.
Hybrid energy harvesting approaches combine multiple bio-inspired mechanisms to ensure reliable power supply across varying environmental conditions. These integrated systems can switch between different energy sources or operate multiple harvesting mechanisms simultaneously, providing robust power solutions for long-term autonomous operation of micro-robotic systems in unpredictable environments.
Photosynthetic energy harvesting mimics plant chloroplasts to convert ambient light into electrical energy for micro-robotic systems. Advanced photovoltaic cells integrated at microscale dimensions can achieve power densities sufficient for basic locomotion and sensing operations. Recent developments in organic photovoltaics and perovskite solar cells have enabled flexible, lightweight energy harvesting modules that can be seamlessly integrated into micro-robot architectures without compromising mobility or functionality.
Piezoelectric energy harvesting exploits mechanical vibrations and deformations, similar to how certain marine organisms generate bioelectricity through muscular contractions. Micro-scale piezoelectric generators can capture energy from environmental vibrations, robot locomotion, or deliberate mechanical stimulation. These systems demonstrate particular promise in applications where micro-robots operate in dynamic environments with consistent mechanical energy sources.
Thermoelectric energy conversion leverages temperature gradients, inspired by thermophilic organisms that thrive in temperature-variable environments. Miniaturized thermoelectric generators can harvest energy from ambient temperature differences, body heat, or thermal variations in operational environments. The integration of advanced thermoelectric materials enables continuous power generation even in relatively small temperature differentials.
Electrochemical energy harvesting draws inspiration from biological fuel cells found in living organisms. Micro-fuel cells can utilize environmental chemicals, organic compounds, or even biological fluids as energy sources. These bio-inspired systems offer extended operational periods and can potentially achieve energy autonomy in environments rich in suitable chemical substrates.
Hybrid energy harvesting approaches combine multiple bio-inspired mechanisms to ensure reliable power supply across varying environmental conditions. These integrated systems can switch between different energy sources or operate multiple harvesting mechanisms simultaneously, providing robust power solutions for long-term autonomous operation of micro-robotic systems in unpredictable environments.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!