Biomimetic Actuators vs Shape Memory: Dynamics Study
APR 20, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Biomimetic and SMA Actuator Technology Background and Goals
Biomimetic actuators represent a revolutionary approach to mechanical actuation inspired by biological systems found in nature. These devices emulate the movement mechanisms of living organisms, such as muscle contractions, plant movements, and insect locomotion. The field emerged from the convergence of materials science, robotics, and biology, seeking to replicate the efficiency, adaptability, and multifunctionality observed in natural systems. Early developments traced back to the 1990s when researchers began systematically studying biological motion patterns and translating them into artificial systems.
Shape Memory Alloys (SMAs) have evolved as a distinct class of smart materials since their discovery in the 1960s, with nitinol being the most prominent example. These materials exhibit the unique ability to return to predetermined shapes when subjected to specific temperature changes or electrical stimulation. The technology has matured significantly over five decades, progressing from laboratory curiosities to commercially viable actuators used in aerospace, automotive, and medical applications.
The convergence of biomimetic principles with SMA technology represents a natural evolution in actuator development. Traditional electromagnetic and pneumatic actuators often lack the power-to-weight ratios, silent operation, and organic motion characteristics found in biological systems. This technological gap has driven researchers to explore hybrid approaches that combine the reliability of SMAs with the sophisticated control strategies observed in nature.
Current research objectives focus on understanding the dynamic behavior differences between purely biomimetic actuators and SMA-based systems. Key goals include characterizing response times, energy efficiency, force generation capabilities, and control precision under various operating conditions. Researchers aim to establish comprehensive performance benchmarks that can guide future actuator design decisions.
The ultimate technological target involves developing next-generation actuators that seamlessly integrate biological inspiration with advanced materials properties. This includes achieving muscle-like performance characteristics such as variable stiffness, self-healing capabilities, and adaptive control responses. The field seeks to overcome current limitations in both domains, including the relatively slow response times of SMAs and the complexity of replicating sophisticated biological control mechanisms in artificial systems.
Shape Memory Alloys (SMAs) have evolved as a distinct class of smart materials since their discovery in the 1960s, with nitinol being the most prominent example. These materials exhibit the unique ability to return to predetermined shapes when subjected to specific temperature changes or electrical stimulation. The technology has matured significantly over five decades, progressing from laboratory curiosities to commercially viable actuators used in aerospace, automotive, and medical applications.
The convergence of biomimetic principles with SMA technology represents a natural evolution in actuator development. Traditional electromagnetic and pneumatic actuators often lack the power-to-weight ratios, silent operation, and organic motion characteristics found in biological systems. This technological gap has driven researchers to explore hybrid approaches that combine the reliability of SMAs with the sophisticated control strategies observed in nature.
Current research objectives focus on understanding the dynamic behavior differences between purely biomimetic actuators and SMA-based systems. Key goals include characterizing response times, energy efficiency, force generation capabilities, and control precision under various operating conditions. Researchers aim to establish comprehensive performance benchmarks that can guide future actuator design decisions.
The ultimate technological target involves developing next-generation actuators that seamlessly integrate biological inspiration with advanced materials properties. This includes achieving muscle-like performance characteristics such as variable stiffness, self-healing capabilities, and adaptive control responses. The field seeks to overcome current limitations in both domains, including the relatively slow response times of SMAs and the complexity of replicating sophisticated biological control mechanisms in artificial systems.
Market Demand Analysis for Advanced Actuator Systems
The global actuator market is experiencing unprecedented growth driven by the convergence of automation, robotics, and smart material technologies. Advanced actuator systems, particularly those incorporating biomimetic principles and shape memory alloys, are positioned at the forefront of this technological revolution. Industries ranging from aerospace and automotive to medical devices and consumer electronics are actively seeking actuator solutions that offer superior performance characteristics including enhanced precision, reduced energy consumption, and improved durability.
Biomimetic actuators have garnered significant attention due to their ability to replicate natural movement patterns and achieve complex motion profiles that traditional actuators cannot match. The demand for these systems is particularly strong in robotics applications where human-like dexterity and adaptive responses are crucial. Medical robotics, prosthetics, and rehabilitation devices represent high-value market segments where biomimetic actuators can command premium pricing due to their unique capabilities in mimicking biological muscle behavior.
Shape memory alloy actuators are experiencing robust demand across multiple sectors, driven by their compact form factor, silent operation, and ability to generate substantial force relative to their size. The aerospace industry has emerged as a key adopter, utilizing these actuators for morphing wing technologies and adaptive control surfaces. Automotive applications, including active aerodynamics and advanced driver assistance systems, are creating substantial market opportunities for shape memory actuator technologies.
The miniaturization trend in electronics and medical devices is creating new market niches for advanced actuator systems. Micro-electromechanical systems applications require actuators that can operate reliably at microscopic scales while maintaining precise control characteristics. This demand is particularly pronounced in optical systems, microfluidics, and implantable medical devices where traditional electromagnetic actuators prove inadequate.
Industrial automation represents the largest volume market for advanced actuator systems, with manufacturers seeking solutions that offer improved energy efficiency and reduced maintenance requirements. The integration of smart materials into actuator designs addresses these needs while enabling new functionalities such as self-sensing capabilities and adaptive stiffness control. Manufacturing processes in semiconductor fabrication, precision assembly, and quality control systems are driving demand for actuators with nanometer-level positioning accuracy.
Emerging applications in soft robotics and wearable technologies are creating entirely new market categories for advanced actuator systems. These applications require actuators that can operate safely in close proximity to humans while providing natural, compliant motion characteristics. The growing emphasis on human-machine interaction is expanding the addressable market for biomimetic and shape memory actuator technologies beyond traditional industrial applications into consumer and healthcare markets.
Biomimetic actuators have garnered significant attention due to their ability to replicate natural movement patterns and achieve complex motion profiles that traditional actuators cannot match. The demand for these systems is particularly strong in robotics applications where human-like dexterity and adaptive responses are crucial. Medical robotics, prosthetics, and rehabilitation devices represent high-value market segments where biomimetic actuators can command premium pricing due to their unique capabilities in mimicking biological muscle behavior.
Shape memory alloy actuators are experiencing robust demand across multiple sectors, driven by their compact form factor, silent operation, and ability to generate substantial force relative to their size. The aerospace industry has emerged as a key adopter, utilizing these actuators for morphing wing technologies and adaptive control surfaces. Automotive applications, including active aerodynamics and advanced driver assistance systems, are creating substantial market opportunities for shape memory actuator technologies.
The miniaturization trend in electronics and medical devices is creating new market niches for advanced actuator systems. Micro-electromechanical systems applications require actuators that can operate reliably at microscopic scales while maintaining precise control characteristics. This demand is particularly pronounced in optical systems, microfluidics, and implantable medical devices where traditional electromagnetic actuators prove inadequate.
Industrial automation represents the largest volume market for advanced actuator systems, with manufacturers seeking solutions that offer improved energy efficiency and reduced maintenance requirements. The integration of smart materials into actuator designs addresses these needs while enabling new functionalities such as self-sensing capabilities and adaptive stiffness control. Manufacturing processes in semiconductor fabrication, precision assembly, and quality control systems are driving demand for actuators with nanometer-level positioning accuracy.
Emerging applications in soft robotics and wearable technologies are creating entirely new market categories for advanced actuator systems. These applications require actuators that can operate safely in close proximity to humans while providing natural, compliant motion characteristics. The growing emphasis on human-machine interaction is expanding the addressable market for biomimetic and shape memory actuator technologies beyond traditional industrial applications into consumer and healthcare markets.
Current State and Challenges in Actuator Dynamics
The field of actuator dynamics currently encompasses two primary technological paradigms: biomimetic actuators inspired by natural muscle systems and shape memory alloys (SMAs) that leverage thermally-induced phase transformations. Both technologies have achieved significant milestones in laboratory settings, yet substantial gaps remain between theoretical capabilities and practical implementation in real-world applications.
Biomimetic actuators have demonstrated remarkable progress in mimicking natural muscle contraction mechanisms, with recent developments achieving force-to-weight ratios approaching 40% of biological muscle performance. However, these systems face critical challenges in power density limitations, typically operating at 10-50 W/kg compared to the 300+ W/kg observed in natural muscle tissue. The complexity of control systems required for coordinated multi-actuator arrays presents additional technical barriers, particularly in achieving the seamless integration necessary for lifelike motion patterns.
Shape memory alloy actuators have established themselves as commercially viable solutions in specific applications, offering exceptional force output and precise positioning capabilities. Current SMA systems can generate stresses up to 800 MPa while maintaining positioning accuracy within micrometers. Nevertheless, these actuators are constrained by inherently slow response times, typically requiring 1-10 seconds for complete activation cycles, which severely limits their applicability in dynamic systems requiring rapid response.
The thermal management challenge represents a critical bottleneck for both technologies. SMA actuators generate substantial heat during operation, requiring sophisticated cooling systems that add complexity and reduce overall system efficiency. Biomimetic actuators face similar thermal constraints, particularly in high-frequency operation scenarios where heat dissipation becomes a limiting factor for sustained performance.
Dynamic modeling and control present ongoing challenges across both domains. Current mathematical models struggle to accurately predict nonlinear behaviors, hysteresis effects, and fatigue characteristics under varying operational conditions. The lack of standardized testing protocols and performance metrics further complicates comparative analysis and optimization efforts.
Manufacturing scalability remains a significant constraint, with both technologies requiring specialized materials and fabrication processes that limit cost-effectiveness in large-scale production. The integration of sensing capabilities for closed-loop control adds another layer of complexity, particularly in miniaturized applications where space constraints become critical factors in system design and performance optimization.
Biomimetic actuators have demonstrated remarkable progress in mimicking natural muscle contraction mechanisms, with recent developments achieving force-to-weight ratios approaching 40% of biological muscle performance. However, these systems face critical challenges in power density limitations, typically operating at 10-50 W/kg compared to the 300+ W/kg observed in natural muscle tissue. The complexity of control systems required for coordinated multi-actuator arrays presents additional technical barriers, particularly in achieving the seamless integration necessary for lifelike motion patterns.
Shape memory alloy actuators have established themselves as commercially viable solutions in specific applications, offering exceptional force output and precise positioning capabilities. Current SMA systems can generate stresses up to 800 MPa while maintaining positioning accuracy within micrometers. Nevertheless, these actuators are constrained by inherently slow response times, typically requiring 1-10 seconds for complete activation cycles, which severely limits their applicability in dynamic systems requiring rapid response.
The thermal management challenge represents a critical bottleneck for both technologies. SMA actuators generate substantial heat during operation, requiring sophisticated cooling systems that add complexity and reduce overall system efficiency. Biomimetic actuators face similar thermal constraints, particularly in high-frequency operation scenarios where heat dissipation becomes a limiting factor for sustained performance.
Dynamic modeling and control present ongoing challenges across both domains. Current mathematical models struggle to accurately predict nonlinear behaviors, hysteresis effects, and fatigue characteristics under varying operational conditions. The lack of standardized testing protocols and performance metrics further complicates comparative analysis and optimization efforts.
Manufacturing scalability remains a significant constraint, with both technologies requiring specialized materials and fabrication processes that limit cost-effectiveness in large-scale production. The integration of sensing capabilities for closed-loop control adds another layer of complexity, particularly in miniaturized applications where space constraints become critical factors in system design and performance optimization.
Current Solutions for Actuator Dynamics Optimization
01 Shape memory alloy actuators and their control mechanisms
Shape memory alloys (SMAs) are materials that can return to a predetermined shape when heated above their transformation temperature. These materials are widely used in actuator applications due to their high power-to-weight ratio and simple actuation mechanism. The control of SMA actuators involves precise temperature regulation and feedback systems to achieve desired motion and force output. Various control strategies including pulse width modulation and resistance feedback have been developed to optimize the performance and response time of these actuators.- Shape memory alloy actuators and control systems: Shape memory alloys (SMAs) are utilized as actuators that can change shape in response to temperature variations or electrical stimulation. These materials exhibit unique phase transformation properties that enable precise control of mechanical motion. Control systems are integrated to regulate the activation and deactivation cycles, allowing for programmable actuation sequences. The technology finds applications in robotics, medical devices, and adaptive structures where compact, lightweight actuators are required.
- Biomimetic soft actuators inspired by biological systems: Biomimetic actuators replicate the movement mechanisms found in natural organisms such as muscles, tentacles, or plant movements. These soft actuators utilize flexible materials and novel actuation principles to achieve lifelike motion patterns. The designs often incorporate compliant structures that can bend, twist, or contract in response to external stimuli. Such actuators are particularly useful in applications requiring safe human-robot interaction, delicate object manipulation, and adaptive gripping mechanisms.
- Shape memory polymer materials and composites: Shape memory polymers (SMPs) are materials that can be programmed to remember and recover their original shape after deformation when exposed to specific triggers such as heat, light, or chemical stimuli. These polymers offer advantages over metallic shape memory materials including lower density, greater deformability, and easier processing. Composite formulations combine SMPs with reinforcing materials to enhance mechanical properties and response characteristics. Applications include deployable structures, self-healing materials, and morphing surfaces.
- Dynamic modeling and simulation of shape memory material behavior: Mathematical models and computational simulations are developed to predict the thermomechanical behavior of shape memory materials under various loading and environmental conditions. These models account for phase transformation kinetics, hysteresis effects, and stress-strain relationships during the shape memory cycle. Finite element analysis and other numerical methods are employed to optimize actuator designs and predict performance characteristics. Such modeling tools are essential for designing reliable actuator systems and understanding the complex dynamics of shape memory materials.
- Multi-functional actuator systems with sensing and feedback capabilities: Advanced actuator systems integrate shape memory materials with sensors and feedback control mechanisms to create intelligent, self-regulating devices. These systems can monitor their own state, environmental conditions, and performance parameters in real-time. Feedback loops enable adaptive behavior and compensation for external disturbances or material degradation. The integration of actuation and sensing functions in a single device reduces system complexity and improves response accuracy. Applications include adaptive aerospace structures, smart medical implants, and autonomous robotic systems.
02 Shape memory polymer-based actuators and composites
Shape memory polymers represent a class of smart materials that can recover their original shape upon exposure to external stimuli such as heat, light, or electrical current. These polymers offer advantages including lightweight, low cost, and large deformation capability compared to metallic counterparts. Composite structures incorporating shape memory polymers with reinforcing materials have been developed to enhance mechanical properties while maintaining shape memory functionality. Applications include deployable structures, soft robotics, and adaptive systems.Expand Specific Solutions03 Biomimetic muscle-like actuators and artificial muscle systems
Biomimetic actuators are designed to replicate the functionality and performance characteristics of biological muscles. These systems utilize various actuation principles including electroactive polymers, pneumatic artificial muscles, and twisted fiber actuators to achieve muscle-like contraction and force generation. The development focuses on achieving high strain rates, energy efficiency, and compliance similar to natural muscle tissue. Such actuators find applications in prosthetics, humanoid robotics, and rehabilitation devices.Expand Specific Solutions04 Dynamic modeling and control of shape memory material systems
The dynamic behavior of shape memory materials involves complex thermomechanical coupling and phase transformation kinetics. Mathematical models have been developed to predict the response characteristics including hysteresis, transformation dynamics, and stress-strain relationships under various loading conditions. Advanced control algorithms incorporating these models enable precise positioning and force control in actuator applications. Finite element analysis and computational methods are employed to simulate the dynamic performance and optimize design parameters.Expand Specific Solutions05 Multi-functional and adaptive structures using shape memory materials
Shape memory materials enable the development of structures that can adapt their configuration, stiffness, or other properties in response to environmental changes or control signals. These adaptive structures integrate sensing, actuation, and control capabilities to achieve autonomous behavior. Applications include morphing aircraft components, deployable space structures, and reconfigurable mechanical systems. The integration of multiple shape memory elements allows for complex motion patterns and distributed actuation capabilities.Expand Specific Solutions
Key Players in Biomimetic and SMA Actuator Industry
The biomimetic actuators versus shape memory alloys dynamics field represents an emerging technology sector in the early-to-mid development stage, characterized by significant research investment and growing commercial interest. The market demonstrates substantial growth potential, driven by applications across automotive, aerospace, medical devices, and robotics industries. Technology maturity varies considerably among key players: established corporations like Toyota Motor Corp., Samsung Electronics, Boeing, and Medtronic leverage extensive R&D capabilities and manufacturing scale, while specialized firms such as SAES Getters SpA, Cambridge Mechatronics, and memetis GmbH focus on niche applications and advanced materials development. Academic institutions including MIT, Georgia Tech, and Auburn University contribute fundamental research breakthroughs. The competitive landscape shows a hybrid ecosystem where traditional industrial giants collaborate with innovative startups and research institutions, indicating the technology's transition from laboratory concepts toward commercial viability, though widespread market adoption remains several years away.
GM Global Technology Operations LLC
Technical Solution: GM has developed advanced biomimetic actuator systems for automotive applications, focusing on muscle-like actuators that mimic biological movement patterns. Their technology integrates electroactive polymers with traditional mechanical systems to create responsive actuators for adaptive vehicle components. The company's research emphasizes dynamic response characteristics, comparing biomimetic approaches with shape memory alloy implementations for applications such as active aerodynamics, adaptive seating, and climate control systems. Their studies demonstrate improved energy efficiency and response times compared to conventional actuators, with particular focus on temperature-dependent performance optimization and fatigue resistance in automotive environments.
Strengths: Extensive automotive application experience, robust testing protocols. Weaknesses: Limited to automotive-specific requirements, slower adoption of cutting-edge materials.
Toyota Motor Engineering & Manufacturing North America, Inc.
Technical Solution: Toyota has pioneered the integration of shape memory alloys in automotive actuator systems, developing comprehensive dynamics models that compare biomimetic and SMA-based approaches. Their research focuses on hybrid actuator systems that combine the rapid response of biomimetic designs with the reliability of shape memory materials. The company has extensively studied the dynamic behavior of these systems under varying load conditions, temperature fluctuations, and cyclic loading scenarios. Their technology platform includes advanced control algorithms that optimize actuator performance based on real-time environmental conditions, with applications in active suspension systems, adaptive body panels, and intelligent interior components.
Strengths: Strong R&D capabilities, proven manufacturing scalability, comprehensive testing methodologies. Weaknesses: Conservative approach to new technologies, focus primarily on automotive applications.
Core Technologies in Biomimetic vs SMA Dynamics
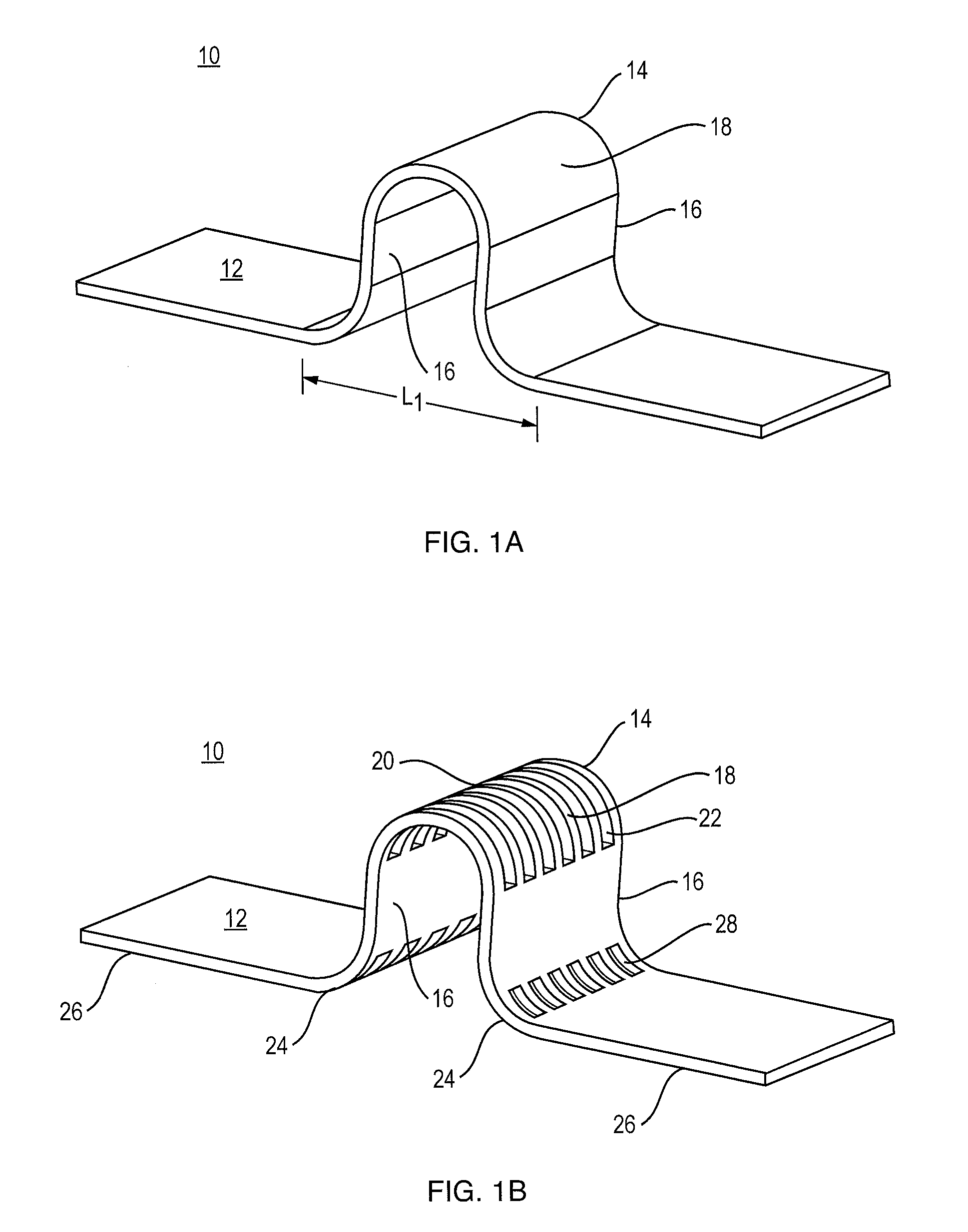
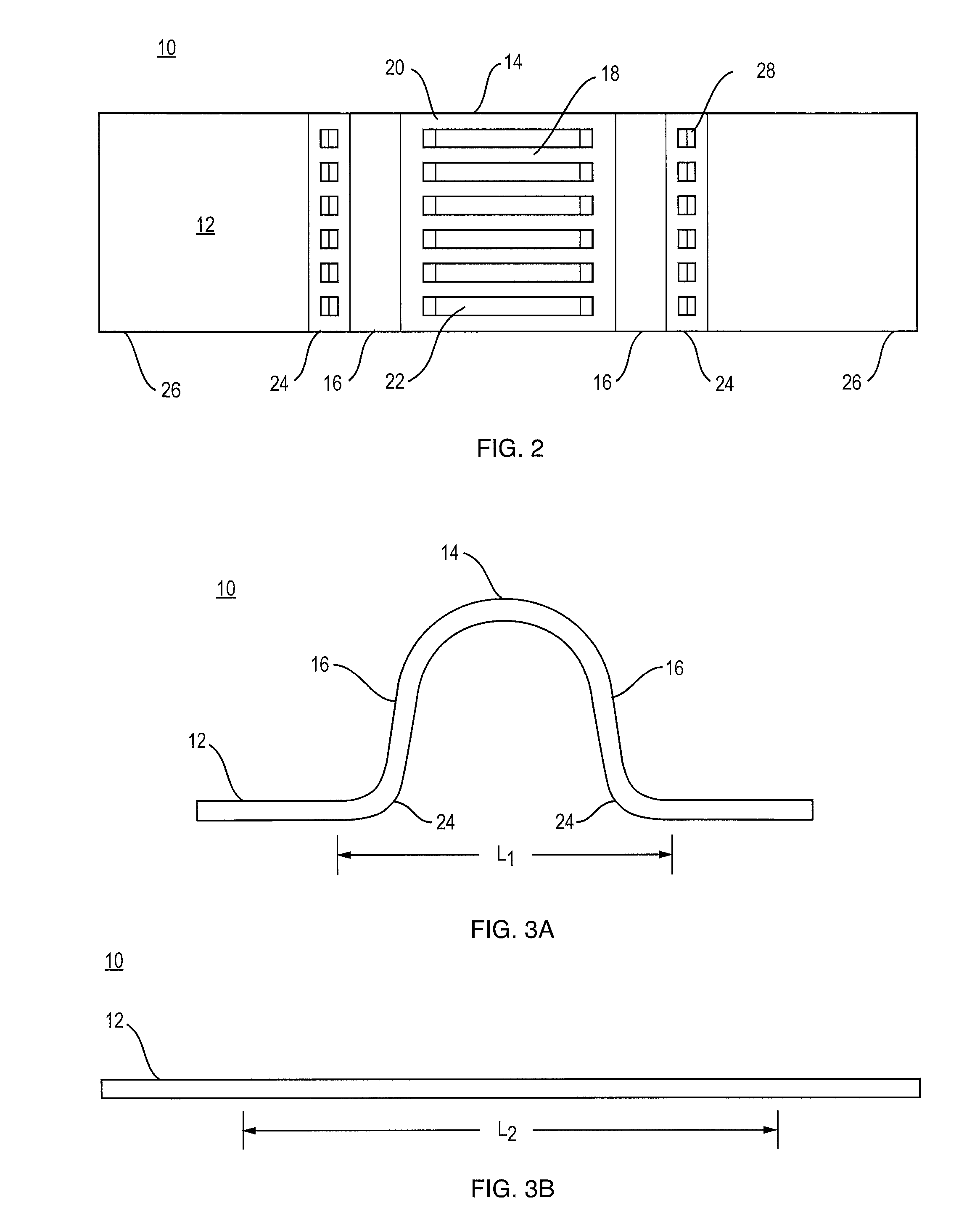
Shape memory alloy (SMA) actuators and devices including bio-inspired shape memory alloy composite (bismac) actuators
PatentInactiveUS20120174571A1
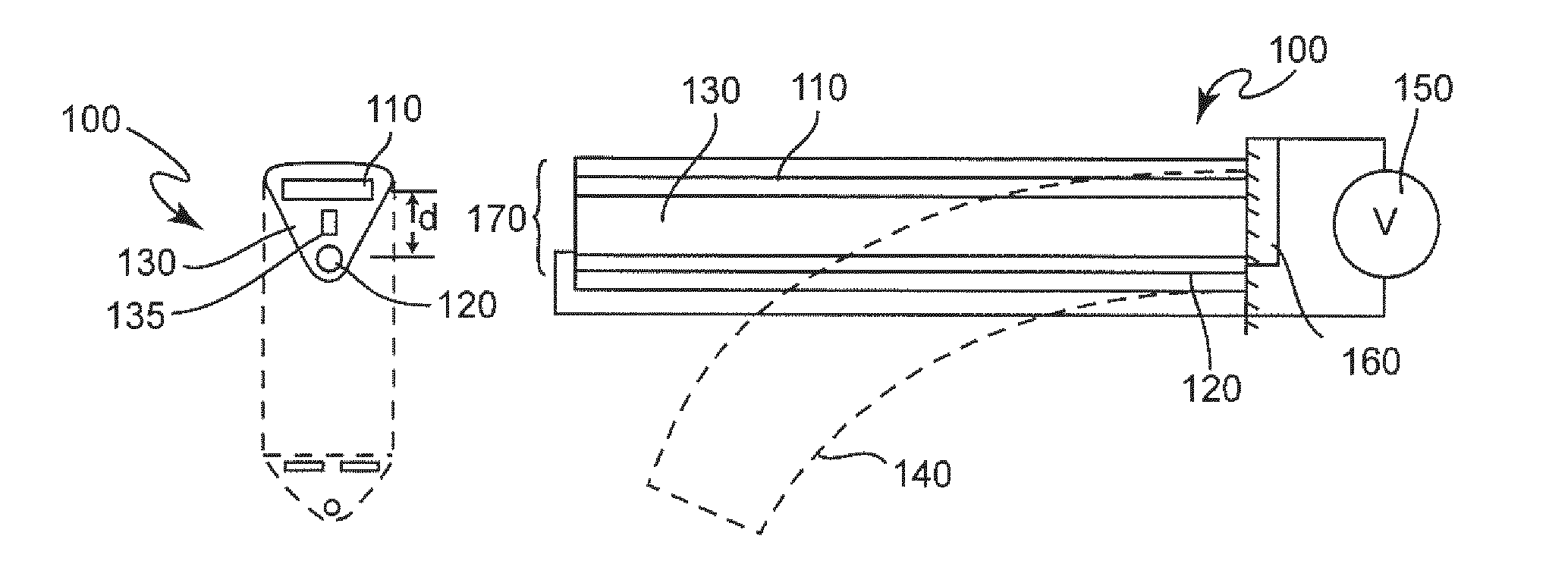
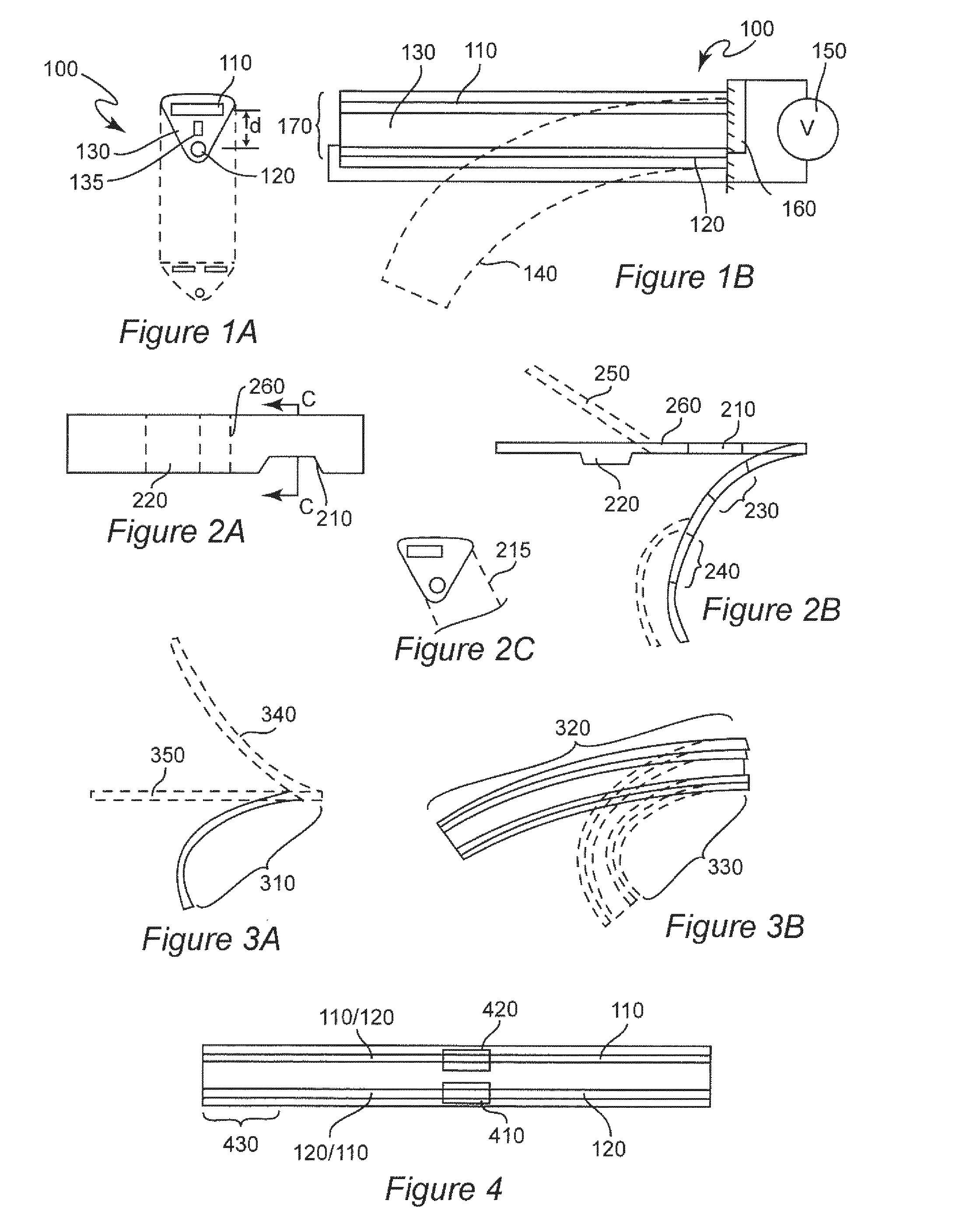
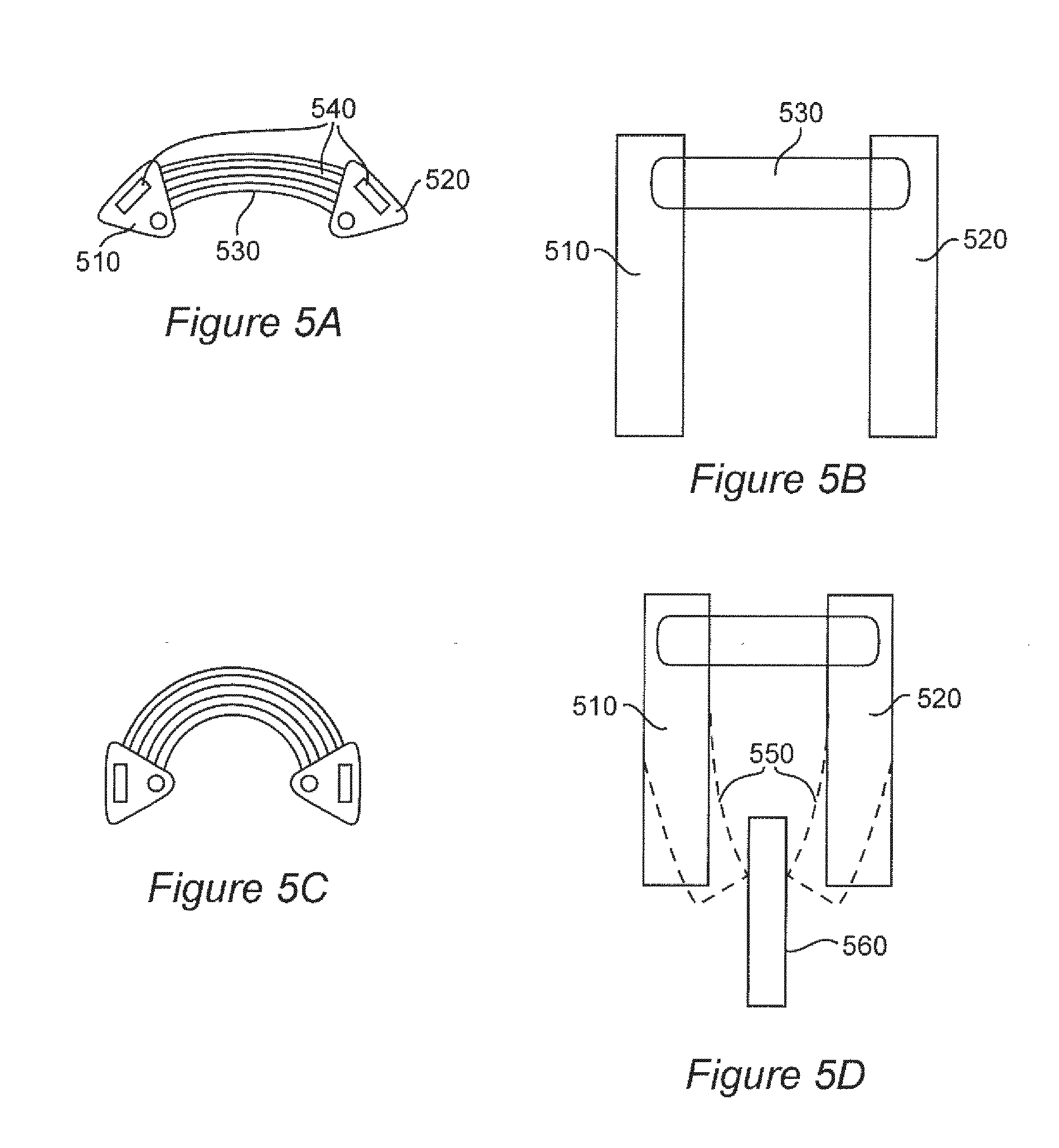
Innovation
- An actuator design combining a flexible spring beam with a shape memory alloy element, where the separation distance between them amplifies the motion by creating a bending moment, allowing for a range of motion comparable to biological muscle tissue while maintaining sufficient force.

Flexible actuator based on shape memory alloy sheet
PatentInactiveUS8733099B2
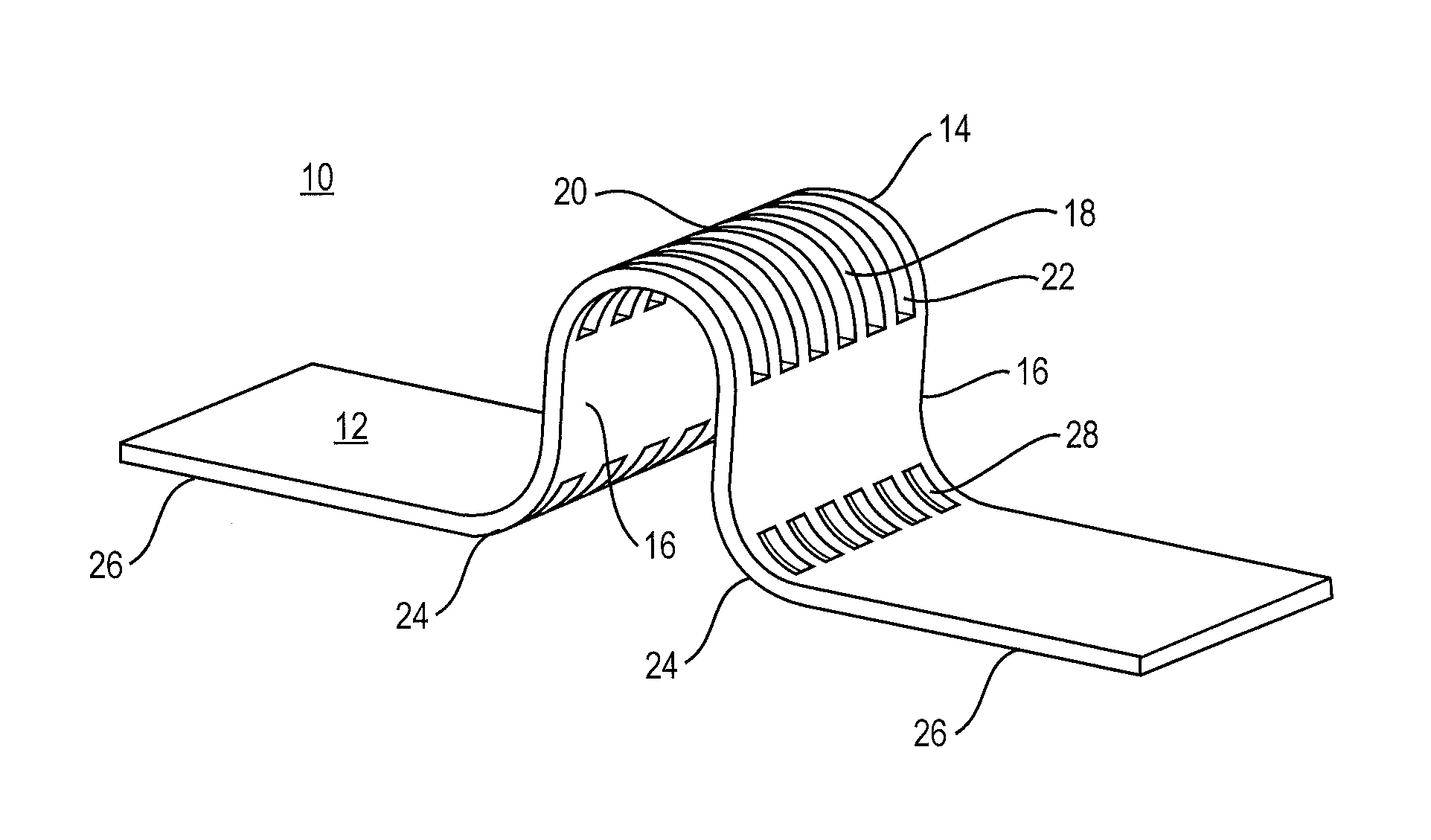
Innovation
- A flexible unit-cell actuator using a shape memory alloy sheet with a fold and a heat source that concentrates heating at the fold to change its state, eliminating the need for transmission mechanisms and allowing for compact, lightweight designs with high force-to-weight ratios.

Material Safety Standards for Advanced Actuators
Material safety standards for advanced actuators represent a critical framework governing the development and deployment of both biomimetic and shape memory alloy-based actuation systems. These standards encompass comprehensive guidelines addressing biocompatibility, mechanical reliability, and operational safety parameters that directly influence the design constraints and performance characteristics of next-generation actuator technologies.
The regulatory landscape for biomimetic actuators primarily focuses on bio-inspired materials and their interaction with biological systems. Current standards mandate rigorous cytotoxicity testing protocols, particularly for actuators intended for medical applications or human-machine interfaces. ISO 10993 series provides the foundational framework for biological evaluation, while ASTM F2027 specifically addresses degradation testing of bioresorbable materials commonly employed in biomimetic designs.
Shape memory alloy actuators face distinct safety requirements centered on thermal management and mechanical fatigue resistance. The ASTM F2004 standard establishes testing procedures for transformation temperature stability, while IEC 62304 governs software-controlled SMA systems in medical devices. These materials must demonstrate consistent phase transformation behavior across millions of cycles without degradation that could compromise safety margins.
Emerging safety considerations address the unique dynamic behaviors observed in comparative studies between these actuator types. Biomimetic systems often exhibit non-linear response characteristics that challenge traditional safety factor calculations, necessitating probabilistic risk assessment methodologies. Shape memory actuators require specialized protocols for managing thermal runaway conditions and ensuring predictable force output under varying environmental conditions.
The convergence of these technologies demands updated safety frameworks that account for hybrid actuator systems combining biomimetic principles with shape memory materials. Current standardization efforts focus on establishing unified testing protocols that evaluate dynamic performance while maintaining stringent safety requirements across diverse application domains.
The regulatory landscape for biomimetic actuators primarily focuses on bio-inspired materials and their interaction with biological systems. Current standards mandate rigorous cytotoxicity testing protocols, particularly for actuators intended for medical applications or human-machine interfaces. ISO 10993 series provides the foundational framework for biological evaluation, while ASTM F2027 specifically addresses degradation testing of bioresorbable materials commonly employed in biomimetic designs.
Shape memory alloy actuators face distinct safety requirements centered on thermal management and mechanical fatigue resistance. The ASTM F2004 standard establishes testing procedures for transformation temperature stability, while IEC 62304 governs software-controlled SMA systems in medical devices. These materials must demonstrate consistent phase transformation behavior across millions of cycles without degradation that could compromise safety margins.
Emerging safety considerations address the unique dynamic behaviors observed in comparative studies between these actuator types. Biomimetic systems often exhibit non-linear response characteristics that challenge traditional safety factor calculations, necessitating probabilistic risk assessment methodologies. Shape memory actuators require specialized protocols for managing thermal runaway conditions and ensuring predictable force output under varying environmental conditions.
The convergence of these technologies demands updated safety frameworks that account for hybrid actuator systems combining biomimetic principles with shape memory materials. Current standardization efforts focus on establishing unified testing protocols that evaluate dynamic performance while maintaining stringent safety requirements across diverse application domains.
Energy Efficiency Considerations in Actuator Design
Energy efficiency represents a critical design parameter that fundamentally distinguishes biomimetic actuators from shape memory alloy (SMA) actuators, with implications extending beyond simple power consumption to encompass thermal management, response characteristics, and operational sustainability. The comparative analysis of energy utilization patterns reveals distinct advantages and limitations inherent to each actuator technology.
Biomimetic actuators demonstrate superior energy efficiency through their ability to mimic natural muscle contraction mechanisms, typically achieving energy conversion rates of 20-40% compared to traditional electromagnetic systems. These systems leverage electroactive polymers, ionic polymer-metal composites, or pneumatic artificial muscles that operate at relatively low voltages while generating substantial force outputs. The distributed actuation mechanism inherent in biomimetic designs enables localized energy delivery, minimizing parasitic losses associated with mechanical transmission systems.
Shape memory actuators present a contrasting energy profile characterized by high energy density but significant thermal inefficiencies. SMA systems require substantial heating energy to trigger phase transformations, with typical energy requirements ranging from 10-50 J/g depending on the alloy composition and transformation temperature. The cooling phase relies on passive heat dissipation or active cooling systems, introducing additional energy overhead that can reduce overall system efficiency to 5-15%.
Dynamic energy considerations reveal temporal efficiency variations between these technologies. Biomimetic actuators maintain relatively constant power consumption during sustained operations, enabling predictable energy budgeting and thermal management. Conversely, SMA actuators exhibit pulsed energy consumption patterns with high instantaneous power requirements during activation phases, necessitating robust power supply systems and thermal management strategies.
Operational frequency significantly impacts energy efficiency metrics for both actuator types. Biomimetic systems demonstrate optimal efficiency at moderate frequencies (1-10 Hz), aligning with biological muscle performance characteristics. SMA actuators face frequency limitations due to thermal time constants, with energy efficiency degrading rapidly above 1 Hz due to incomplete cooling cycles and accumulated thermal energy.
System-level energy optimization strategies differ substantially between these technologies. Biomimetic actuators benefit from distributed control architectures that enable selective activation of actuator segments, reducing overall power consumption during partial actuation scenarios. SMA systems require sophisticated thermal management and energy recovery mechanisms to achieve acceptable efficiency levels in practical applications.
Biomimetic actuators demonstrate superior energy efficiency through their ability to mimic natural muscle contraction mechanisms, typically achieving energy conversion rates of 20-40% compared to traditional electromagnetic systems. These systems leverage electroactive polymers, ionic polymer-metal composites, or pneumatic artificial muscles that operate at relatively low voltages while generating substantial force outputs. The distributed actuation mechanism inherent in biomimetic designs enables localized energy delivery, minimizing parasitic losses associated with mechanical transmission systems.
Shape memory actuators present a contrasting energy profile characterized by high energy density but significant thermal inefficiencies. SMA systems require substantial heating energy to trigger phase transformations, with typical energy requirements ranging from 10-50 J/g depending on the alloy composition and transformation temperature. The cooling phase relies on passive heat dissipation or active cooling systems, introducing additional energy overhead that can reduce overall system efficiency to 5-15%.
Dynamic energy considerations reveal temporal efficiency variations between these technologies. Biomimetic actuators maintain relatively constant power consumption during sustained operations, enabling predictable energy budgeting and thermal management. Conversely, SMA actuators exhibit pulsed energy consumption patterns with high instantaneous power requirements during activation phases, necessitating robust power supply systems and thermal management strategies.
Operational frequency significantly impacts energy efficiency metrics for both actuator types. Biomimetic systems demonstrate optimal efficiency at moderate frequencies (1-10 Hz), aligning with biological muscle performance characteristics. SMA actuators face frequency limitations due to thermal time constants, with energy efficiency degrading rapidly above 1 Hz due to incomplete cooling cycles and accumulated thermal energy.
System-level energy optimization strategies differ substantially between these technologies. Biomimetic actuators benefit from distributed control architectures that enable selective activation of actuator segments, reducing overall power consumption during partial actuation scenarios. SMA systems require sophisticated thermal management and energy recovery mechanisms to achieve acceptable efficiency levels in practical applications.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!