

Enhance Algorithmic Response in Collaborative Robot Skin Design
APR 17, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Collaborative Robot Skin Technology Background and Objectives
Collaborative robot skin technology represents a revolutionary advancement in human-robot interaction, emerging from the convergence of tactile sensing, flexible electronics, and artificial intelligence. This technology aims to endow collaborative robots with human-like tactile perception capabilities, enabling them to safely and effectively work alongside humans in shared environments. The development of robotic skin has evolved from basic pressure-sensitive materials to sophisticated multi-modal sensing systems capable of detecting touch, pressure, temperature, and proximity simultaneously.
The fundamental concept of collaborative robot skin originated in the early 2000s when researchers began exploring biomimetic approaches to robotic sensing. Initial developments focused on creating artificial skin that could replicate basic human tactile functions. However, the integration of advanced algorithms for processing sensory data has become increasingly critical as applications demand more sophisticated responses to environmental stimuli.
Current collaborative robot skin systems face significant challenges in algorithmic response optimization. Traditional approaches often suffer from latency issues, limited processing capabilities, and inadequate adaptation to dynamic environments. The need for enhanced algorithmic response stems from the requirement for real-time decision-making in collaborative scenarios where human safety and task efficiency are paramount.
The primary objective of enhancing algorithmic response in collaborative robot skin design centers on developing intelligent processing systems that can interpret tactile data with human-like speed and accuracy. This involves creating algorithms capable of distinguishing between intentional human contact, accidental collisions, and environmental interactions while maintaining appropriate response protocols for each scenario.
Key technological goals include reducing sensor-to-response latency to sub-millisecond levels, implementing adaptive learning algorithms that improve performance through experience, and developing robust signal processing techniques that can filter noise while preserving critical tactile information. Additionally, the integration of predictive algorithms that anticipate human intentions based on tactile patterns represents a crucial advancement toward truly collaborative robotics.
The evolution toward enhanced algorithmic response also encompasses the development of distributed processing architectures that can handle multiple simultaneous inputs across large skin surfaces. This requires sophisticated data fusion techniques and hierarchical processing systems that can prioritize critical information while maintaining comprehensive environmental awareness.
The fundamental concept of collaborative robot skin originated in the early 2000s when researchers began exploring biomimetic approaches to robotic sensing. Initial developments focused on creating artificial skin that could replicate basic human tactile functions. However, the integration of advanced algorithms for processing sensory data has become increasingly critical as applications demand more sophisticated responses to environmental stimuli.
Current collaborative robot skin systems face significant challenges in algorithmic response optimization. Traditional approaches often suffer from latency issues, limited processing capabilities, and inadequate adaptation to dynamic environments. The need for enhanced algorithmic response stems from the requirement for real-time decision-making in collaborative scenarios where human safety and task efficiency are paramount.
The primary objective of enhancing algorithmic response in collaborative robot skin design centers on developing intelligent processing systems that can interpret tactile data with human-like speed and accuracy. This involves creating algorithms capable of distinguishing between intentional human contact, accidental collisions, and environmental interactions while maintaining appropriate response protocols for each scenario.
Key technological goals include reducing sensor-to-response latency to sub-millisecond levels, implementing adaptive learning algorithms that improve performance through experience, and developing robust signal processing techniques that can filter noise while preserving critical tactile information. Additionally, the integration of predictive algorithms that anticipate human intentions based on tactile patterns represents a crucial advancement toward truly collaborative robotics.
The evolution toward enhanced algorithmic response also encompasses the development of distributed processing architectures that can handle multiple simultaneous inputs across large skin surfaces. This requires sophisticated data fusion techniques and hierarchical processing systems that can prioritize critical information while maintaining comprehensive environmental awareness.
Market Demand for Advanced Robotic Tactile Sensing Solutions
The global robotics industry is experiencing unprecedented growth driven by increasing automation demands across manufacturing, healthcare, service, and domestic sectors. Collaborative robots, or cobots, represent one of the fastest-growing segments within this market, fundamentally changing how humans and machines interact in shared workspaces. This transformation has created substantial demand for advanced tactile sensing technologies that enable safer, more intuitive human-robot collaboration.
Manufacturing industries are leading the adoption of tactile-enabled collaborative robots, particularly in automotive assembly, electronics manufacturing, and precision machining operations. These applications require robots capable of detecting contact forces, surface textures, and material properties to perform delicate assembly tasks, quality inspection, and adaptive manipulation. The ability to sense and respond to tactile feedback allows cobots to work alongside human operators without traditional safety barriers, significantly improving production flexibility and efficiency.
Healthcare and medical robotics represent another high-growth market segment driving demand for sophisticated robotic skin technologies. Surgical robots, rehabilitation devices, and elderly care assistants require highly sensitive tactile feedback systems to ensure patient safety and treatment effectiveness. The aging global population and increasing healthcare automation are accelerating investment in tactile sensing solutions that can provide human-like touch sensitivity and responsiveness.
Service robotics applications, including logistics, hospitality, and domestic assistance, are creating new market opportunities for advanced tactile sensing technologies. These robots must navigate complex environments, handle diverse objects, and interact safely with humans in unpredictable situations. Enhanced algorithmic response capabilities enable robots to adapt their behavior based on tactile input, improving task performance and user acceptance.
The market demand is further intensified by regulatory requirements and safety standards that mandate advanced sensing capabilities for collaborative robots operating in human environments. Industry standards increasingly require real-time force monitoring, collision detection, and adaptive response mechanisms that rely heavily on sophisticated tactile sensing and algorithmic processing capabilities.
Emerging applications in agriculture, construction, and space exploration are expanding market opportunities beyond traditional industrial sectors. These demanding environments require robust tactile sensing solutions capable of operating under extreme conditions while maintaining high sensitivity and reliability. The convergence of artificial intelligence, machine learning, and advanced materials science is enabling new tactile sensing paradigms that meet these diverse market requirements.
Manufacturing industries are leading the adoption of tactile-enabled collaborative robots, particularly in automotive assembly, electronics manufacturing, and precision machining operations. These applications require robots capable of detecting contact forces, surface textures, and material properties to perform delicate assembly tasks, quality inspection, and adaptive manipulation. The ability to sense and respond to tactile feedback allows cobots to work alongside human operators without traditional safety barriers, significantly improving production flexibility and efficiency.
Healthcare and medical robotics represent another high-growth market segment driving demand for sophisticated robotic skin technologies. Surgical robots, rehabilitation devices, and elderly care assistants require highly sensitive tactile feedback systems to ensure patient safety and treatment effectiveness. The aging global population and increasing healthcare automation are accelerating investment in tactile sensing solutions that can provide human-like touch sensitivity and responsiveness.
Service robotics applications, including logistics, hospitality, and domestic assistance, are creating new market opportunities for advanced tactile sensing technologies. These robots must navigate complex environments, handle diverse objects, and interact safely with humans in unpredictable situations. Enhanced algorithmic response capabilities enable robots to adapt their behavior based on tactile input, improving task performance and user acceptance.
The market demand is further intensified by regulatory requirements and safety standards that mandate advanced sensing capabilities for collaborative robots operating in human environments. Industry standards increasingly require real-time force monitoring, collision detection, and adaptive response mechanisms that rely heavily on sophisticated tactile sensing and algorithmic processing capabilities.
Emerging applications in agriculture, construction, and space exploration are expanding market opportunities beyond traditional industrial sectors. These demanding environments require robust tactile sensing solutions capable of operating under extreme conditions while maintaining high sensitivity and reliability. The convergence of artificial intelligence, machine learning, and advanced materials science is enabling new tactile sensing paradigms that meet these diverse market requirements.
Current State and Challenges in Robot Skin Algorithm Development
The development of robot skin algorithms has reached a critical juncture where traditional approaches are being challenged by the increasing demands for real-time responsiveness and multi-modal sensing capabilities. Current algorithmic frameworks primarily rely on conventional signal processing techniques that were originally designed for static sensor arrays, rather than the dynamic, distributed sensing networks that characterize modern robot skin systems. These legacy approaches often struggle with the computational complexity required for processing thousands of tactile sensors simultaneously while maintaining the sub-millisecond response times necessary for safe human-robot collaboration.
Contemporary robot skin implementations face significant challenges in sensor data fusion and interpretation. Most existing algorithms operate on simplified models that treat tactile information as discrete data points, failing to capture the spatial-temporal relationships that are crucial for understanding complex contact scenarios. This limitation becomes particularly pronounced when robots must distinguish between intentional human contact, accidental collisions, and environmental interactions in real-time collaborative settings.
The algorithmic landscape is further complicated by the heterogeneity of sensor technologies employed in robot skin systems. Current solutions often require separate processing pipelines for different sensor modalities, including capacitive, resistive, and optical sensors, leading to increased computational overhead and potential synchronization issues. The lack of unified algorithmic frameworks capable of handling multi-modal sensor fusion represents a significant bottleneck in achieving seamless tactile perception.
Machine learning approaches, while promising, face substantial implementation challenges in robot skin applications. Training data acquisition remains problematic due to the difficulty in generating comprehensive datasets that capture the full spectrum of human-robot interaction scenarios. Additionally, the computational requirements of deep learning models often exceed the processing capabilities of embedded systems typically used in collaborative robots, creating a fundamental mismatch between algorithmic sophistication and hardware constraints.
Latency optimization presents another critical challenge in current robot skin algorithm development. Existing approaches often prioritize accuracy over speed, resulting in processing delays that compromise the safety and naturalness of human-robot interactions. The trade-off between algorithmic complexity and response time remains poorly understood, with limited research addressing the specific temporal requirements of collaborative robotics applications.
Scalability issues further constrain the practical deployment of advanced robot skin algorithms. Current solutions typically demonstrate effectiveness on small-scale prototypes but fail to maintain performance when scaled to full-body robot skin implementations. The exponential increase in computational complexity as sensor density increases has not been adequately addressed by existing algorithmic approaches, limiting the practical applicability of current research outcomes.
Contemporary robot skin implementations face significant challenges in sensor data fusion and interpretation. Most existing algorithms operate on simplified models that treat tactile information as discrete data points, failing to capture the spatial-temporal relationships that are crucial for understanding complex contact scenarios. This limitation becomes particularly pronounced when robots must distinguish between intentional human contact, accidental collisions, and environmental interactions in real-time collaborative settings.
The algorithmic landscape is further complicated by the heterogeneity of sensor technologies employed in robot skin systems. Current solutions often require separate processing pipelines for different sensor modalities, including capacitive, resistive, and optical sensors, leading to increased computational overhead and potential synchronization issues. The lack of unified algorithmic frameworks capable of handling multi-modal sensor fusion represents a significant bottleneck in achieving seamless tactile perception.
Machine learning approaches, while promising, face substantial implementation challenges in robot skin applications. Training data acquisition remains problematic due to the difficulty in generating comprehensive datasets that capture the full spectrum of human-robot interaction scenarios. Additionally, the computational requirements of deep learning models often exceed the processing capabilities of embedded systems typically used in collaborative robots, creating a fundamental mismatch between algorithmic sophistication and hardware constraints.
Latency optimization presents another critical challenge in current robot skin algorithm development. Existing approaches often prioritize accuracy over speed, resulting in processing delays that compromise the safety and naturalness of human-robot interactions. The trade-off between algorithmic complexity and response time remains poorly understood, with limited research addressing the specific temporal requirements of collaborative robotics applications.
Scalability issues further constrain the practical deployment of advanced robot skin algorithms. Current solutions typically demonstrate effectiveness on small-scale prototypes but fail to maintain performance when scaled to full-body robot skin implementations. The exponential increase in computational complexity as sensor density increases has not been adequately addressed by existing algorithmic approaches, limiting the practical applicability of current research outcomes.
Existing Algorithmic Solutions for Robot Skin Response Systems
01 Tactile sensing and force detection mechanisms for robot skin
Collaborative robots utilize advanced tactile sensing technologies integrated into their skin surfaces to detect contact forces, pressure distribution, and touch interactions. These sensing mechanisms employ various sensor arrays, including capacitive, resistive, and piezoelectric sensors, to provide real-time feedback about physical contact. The sensor data enables the robot to distinguish between different types of contact and measure force magnitude, allowing for appropriate response adjustments during human-robot interaction.- Tactile sensing and force detection mechanisms for robot skin: Collaborative robots utilize advanced tactile sensing technologies integrated into their skin surfaces to detect contact forces and pressure. These sensing mechanisms employ various sensor arrays and transducers that can measure the magnitude, location, and direction of applied forces. The tactile feedback enables robots to respond appropriately to physical interactions with humans and objects in their environment, ensuring safe collaboration.
- Collision detection and safety response algorithms: Safety algorithms process sensor data from robot skin to detect potential collisions or unexpected contact events. These algorithms analyze force thresholds, contact patterns, and velocity changes to determine appropriate responses. When contact is detected, the system can trigger immediate safety measures such as stopping robot motion, reducing speed, or initiating compliant behavior to minimize impact forces and prevent injury.
- Adaptive control systems based on skin sensor feedback: Control algorithms utilize real-time feedback from robot skin sensors to adaptively adjust robot behavior and motion parameters. These systems implement machine learning and artificial intelligence techniques to interpret tactile information and modify robot trajectories, grip forces, and interaction dynamics. The adaptive control enables smooth and natural human-robot collaboration by allowing the robot to respond intelligently to varying contact conditions.
- Signal processing and data interpretation for skin sensors: Advanced signal processing algorithms filter, analyze, and interpret raw data from distributed sensor networks embedded in robot skin. These algorithms handle noise reduction, sensor calibration, and data fusion from multiple sensing modalities. The processed information is converted into actionable parameters that inform robot control decisions, enabling accurate perception of contact characteristics and environmental interactions.
- Multi-modal sensing integration and response coordination: Collaborative robot systems integrate multiple sensing modalities including pressure, temperature, proximity, and vibration sensors within the robot skin. Coordination algorithms synthesize information from these diverse sources to create comprehensive situational awareness. This multi-modal approach enables more sophisticated response strategies that account for complex interaction scenarios, improving both safety and task performance in collaborative environments.
02 Signal processing and data interpretation algorithms
The robot skin system incorporates sophisticated algorithms for processing raw sensor data and interpreting tactile information. These algorithms filter noise, calibrate sensor readings, and extract meaningful features from the sensory input. Machine learning techniques may be employed to recognize contact patterns and classify different types of interactions. The processed data is then used to generate appropriate control signals for the robot's response mechanisms.Expand Specific Solutions03 Safety response and collision avoidance systems
Algorithmic responses in collaborative robot skin include safety protocols that trigger immediate protective actions upon detecting unexpected contact or potential collisions. These systems implement real-time decision-making algorithms that can initiate emergency stops, reduce robot velocity, or redirect motion paths. The safety algorithms prioritize human protection by calculating risk levels based on contact force, location, and duration, ensuring compliance with collaborative robotics safety standards.Expand Specific Solutions04 Adaptive control and compliant behavior algorithms
The robot skin enables adaptive control strategies that allow the robot to adjust its behavior based on tactile feedback. Compliance algorithms modify the robot's stiffness, impedance, and motion characteristics in response to detected contact. These algorithms enable smooth and natural interaction by allowing the robot to yield to human touch, follow guided movements, or maintain gentle contact during collaborative tasks. The adaptive responses enhance the intuitiveness and safety of human-robot collaboration.Expand Specific Solutions05 Multi-modal integration and context-aware response systems
Advanced collaborative robot skin systems integrate tactile information with other sensory modalities such as vision, proximity sensing, and environmental awareness to generate context-aware responses. The algorithms fuse data from multiple sources to understand the interaction context and intent, enabling more sophisticated and appropriate reactions. This multi-modal approach allows the robot to anticipate contact, distinguish between intentional and accidental touch, and adapt its response strategy based on the overall situation and task requirements.Expand Specific Solutions
Key Players in Collaborative Robotics and Tactile Sensor Industry
The collaborative robot skin technology market is experiencing rapid growth, driven by increasing demand for safer human-robot interaction across manufacturing and service sectors. The industry is in an expansion phase with significant market potential, as companies seek to enhance robotic tactile sensing capabilities for improved safety and performance. Technology maturity varies considerably across different approaches, with established players like Intel, Honda, and YASKAWA Electric demonstrating advanced integration capabilities, while specialized firms such as Tujian Technology, Passini Perception Technology, and AMOSENSE focus on cutting-edge sensor development. Academic institutions including MIT, Zhejiang University, and Tongji University contribute foundational research in materials science and algorithmic optimization. The competitive landscape shows a convergence of traditional robotics manufacturers, semiconductor giants, emerging tactile technology specialists, and research institutions, indicating both the technology's commercial viability and ongoing innovation potential in algorithmic response enhancement.
Honda Motor Co., Ltd.
Technical Solution: Honda has developed advanced tactile sensing systems for collaborative robots using multi-layered flexible sensor arrays integrated with machine learning algorithms. Their approach combines capacitive and resistive sensing elements embedded in silicone-based artificial skin materials, enabling real-time force and texture recognition. The system utilizes distributed processing architecture where each sensor node performs local computation before transmitting data to central controllers, significantly reducing response latency to under 10 milliseconds. Honda's algorithmic framework incorporates adaptive learning mechanisms that continuously improve touch sensitivity and object recognition accuracy through operational experience.
Strengths: Proven automotive-grade reliability and safety standards, extensive R&D resources, strong integration capabilities. Weaknesses: Higher cost due to automotive-grade components, complex system architecture requiring specialized maintenance.
YASKAWA Electric Corp.
Technical Solution: YASKAWA has developed comprehensive tactile feedback systems for their collaborative robot platforms, implementing advanced sensor fusion algorithms that combine multiple sensing modalities including pressure, temperature, and vibration detection. Their proprietary algorithmic framework uses real-time signal processing techniques to filter noise and extract meaningful tactile information within microsecond timeframes. The system employs distributed intelligence architecture where sensor clusters perform local processing before communicating with the main robot controller, enabling rapid response to unexpected contact or collision scenarios. YASKAWA's approach emphasizes industrial robustness and reliability, with algorithms specifically tuned for manufacturing environments requiring precise force control and safety compliance.
Strengths: Industrial-proven reliability, extensive robotics expertise, strong global support network. Weaknesses: Focus primarily on industrial applications, limited customization options, higher initial investment costs.
Core Innovations in Tactile Algorithm Enhancement Technologies
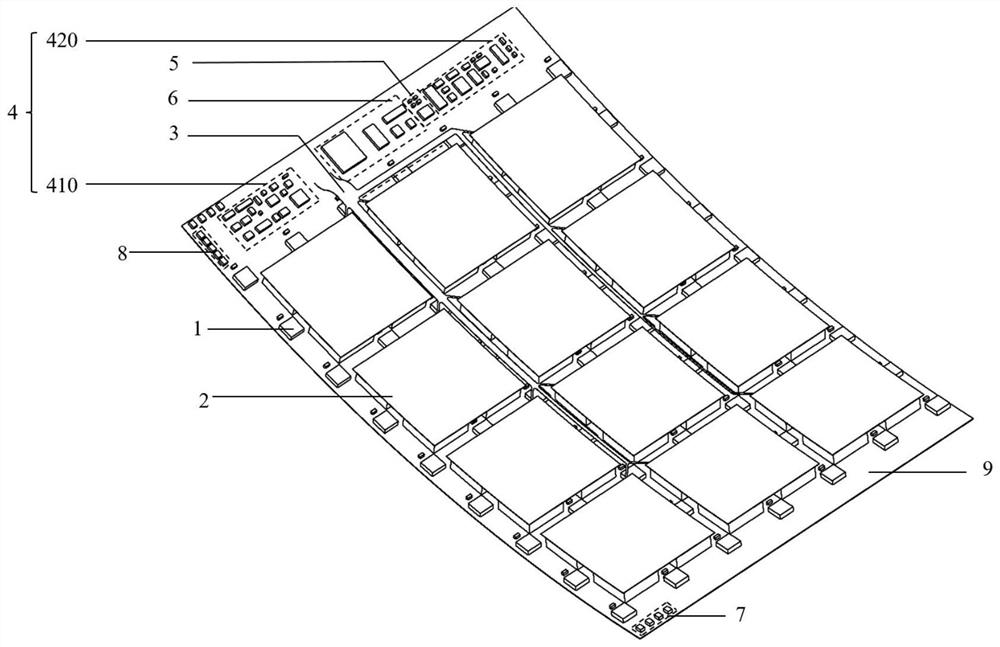
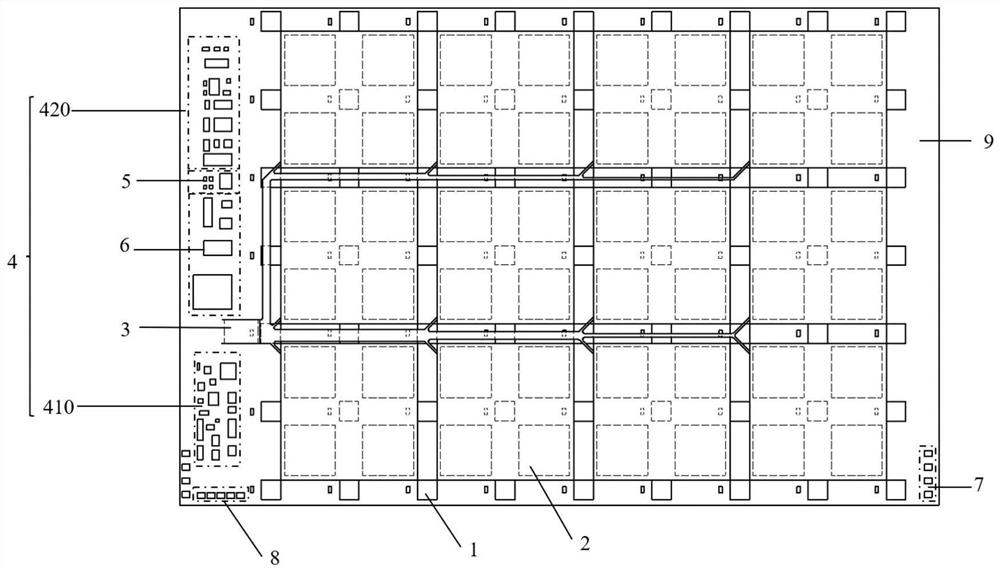
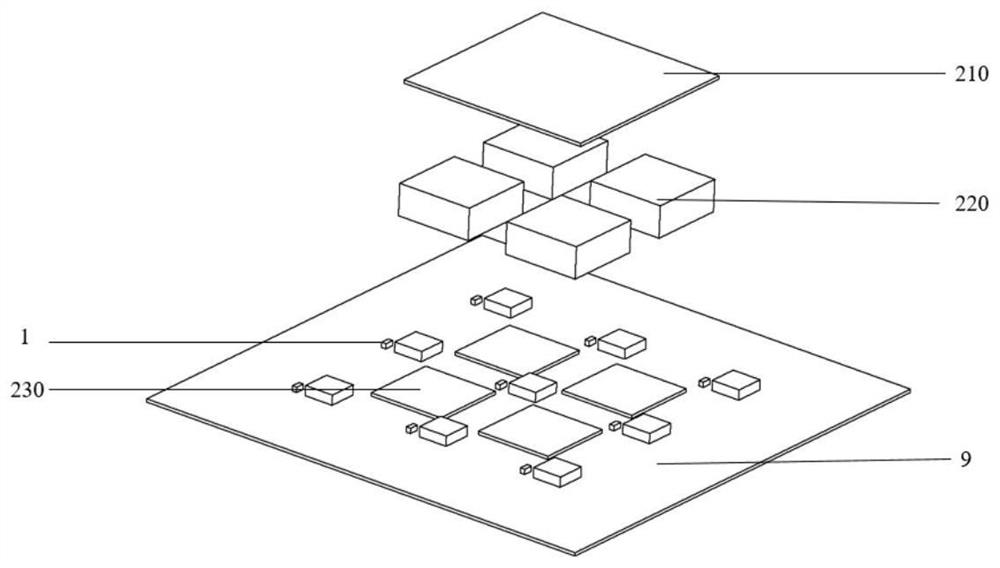
Multi-modal expandable interactive flexible robot skin
PatentActiveCN114347063A
Innovation
- A multi-modal scalable interactive flexible robot skin is designed, which integrates a luminous interaction unit, a flexible sensing unit, a flying line connection unit, etc. through a flexible printed circuit board to achieve proximity sensing and pressure sensing, and performs data processing through a micro-control unit. processing and feedback, providing in-situ visual feedback.

Artificial skin flexible touch sensor measuring device
PatentActiveCN115266902A
Innovation
- An artificial skin flexible tactile sensor measurement device is designed, including a sensing layer, a detection group layer and a substrate. The sensing layer is made of fluffy magnetic material with built-in Hall elements. It detects the material and shape through magnetic field frequency changes and is fixed through the skin. The device provides flexibility and cushioning.




Safety Standards and Regulations for Collaborative Robotics
The regulatory landscape for collaborative robotics has evolved significantly to address the unique safety challenges posed by human-robot interaction in shared workspaces. The International Organization for Standardization (ISO) has established ISO 10218 as the foundational standard for industrial robot safety, which serves as the baseline for collaborative robot operations. This standard has been complemented by ISO/TS 15066, specifically developed to address the technical specifications for collaborative industrial robots, providing detailed guidance on safety-related control systems and human-robot collaboration scenarios.
ISO/TS 15066 introduces four distinct collaborative operation modes: safety-monitored stop, hand guiding, speed and separation monitoring, and power and force limiting. Each mode requires specific safety measures and risk assessment protocols. The power and force limiting mode is particularly relevant to robot skin design, as it establishes biomechanical thresholds for allowable contact forces and pressures between robots and humans. These thresholds directly influence the sensitivity requirements and response algorithms embedded in tactile sensing systems.
Regional regulatory bodies have adapted these international standards to local requirements. The European Union's Machinery Directive 2006/42/EC mandates comprehensive risk assessments for collaborative robotic systems, while OSHA guidelines in the United States emphasize workplace safety protocols for human-robot interaction. The Japanese Industrial Safety and Health Association has developed additional guidelines focusing on the integration of advanced sensing technologies in collaborative applications.
Certification processes for collaborative robots require extensive validation of safety systems, including tactile sensing capabilities and algorithmic response mechanisms. Third-party testing organizations such as TÜV and UL evaluate compliance with safety standards, examining sensor reliability, response time specifications, and fail-safe mechanisms. These certification requirements directly impact the design parameters for robot skin systems, necessitating redundant sensing pathways and validated emergency stop protocols.
Emerging regulatory trends indicate increasing focus on artificial intelligence safety in collaborative robotics. The European Union's proposed AI Act includes provisions for high-risk AI applications in robotics, potentially requiring additional compliance measures for adaptive algorithmic systems. This regulatory evolution suggests future requirements for transparent, auditable decision-making processes in robot skin response algorithms, emphasizing the need for explainable AI approaches in safety-critical applications.
ISO/TS 15066 introduces four distinct collaborative operation modes: safety-monitored stop, hand guiding, speed and separation monitoring, and power and force limiting. Each mode requires specific safety measures and risk assessment protocols. The power and force limiting mode is particularly relevant to robot skin design, as it establishes biomechanical thresholds for allowable contact forces and pressures between robots and humans. These thresholds directly influence the sensitivity requirements and response algorithms embedded in tactile sensing systems.
Regional regulatory bodies have adapted these international standards to local requirements. The European Union's Machinery Directive 2006/42/EC mandates comprehensive risk assessments for collaborative robotic systems, while OSHA guidelines in the United States emphasize workplace safety protocols for human-robot interaction. The Japanese Industrial Safety and Health Association has developed additional guidelines focusing on the integration of advanced sensing technologies in collaborative applications.
Certification processes for collaborative robots require extensive validation of safety systems, including tactile sensing capabilities and algorithmic response mechanisms. Third-party testing organizations such as TÜV and UL evaluate compliance with safety standards, examining sensor reliability, response time specifications, and fail-safe mechanisms. These certification requirements directly impact the design parameters for robot skin systems, necessitating redundant sensing pathways and validated emergency stop protocols.
Emerging regulatory trends indicate increasing focus on artificial intelligence safety in collaborative robotics. The European Union's proposed AI Act includes provisions for high-risk AI applications in robotics, potentially requiring additional compliance measures for adaptive algorithmic systems. This regulatory evolution suggests future requirements for transparent, auditable decision-making processes in robot skin response algorithms, emphasizing the need for explainable AI approaches in safety-critical applications.
Human-Robot Interaction Ethics in Tactile Sensing Applications
The integration of tactile sensing capabilities in collaborative robot skin design raises fundamental ethical considerations that extend beyond technical performance metrics. As robots increasingly operate in close proximity to humans, the ethical implications of how these systems collect, process, and respond to tactile information become paramount to ensuring responsible human-robot interaction.
Privacy and data protection represent primary ethical concerns in tactile sensing applications. Collaborative robots equipped with advanced skin sensors can potentially gather intimate biometric data through touch interactions, including stress levels, emotional states, and physiological conditions. The collection of such sensitive information necessitates robust data governance frameworks that clearly define what tactile data is collected, how it is processed, and who has access to this information.
Consent mechanisms pose unique challenges in tactile sensing scenarios. Unlike visual or auditory data collection where users can be explicitly informed, tactile interactions often occur spontaneously and may not provide clear opportunities for informed consent. Establishing transparent protocols for tactile data collection becomes essential, particularly in healthcare, eldercare, and educational applications where vulnerable populations may be involved.
The algorithmic decision-making processes embedded within tactile sensing systems raise questions about autonomy and human agency. When collaborative robots interpret tactile feedback to make autonomous decisions about physical interactions, the balance between system efficiency and human control becomes critical. Ensuring that humans retain meaningful oversight over robot responses to tactile input is essential for maintaining ethical interaction standards.
Bias and fairness considerations emerge when tactile sensing algorithms are trained on limited demographic datasets. Variations in skin texture, temperature, and tactile response patterns across different populations may lead to discriminatory system behaviors. Addressing these biases requires diverse training datasets and continuous monitoring of system performance across different user groups.
Safety and harm prevention represent fundamental ethical obligations in tactile sensing applications. The potential for misinterpretation of tactile signals could lead to inappropriate robot responses, potentially causing physical or psychological harm. Establishing fail-safe mechanisms and clear boundaries for tactile interaction becomes crucial for maintaining trust and ensuring user safety in collaborative environments.
Human dignity and respect must be preserved throughout tactile sensing interactions. The intimate nature of touch requires careful consideration of cultural sensitivities, personal boundaries, and individual preferences. Designing systems that respect human autonomy while providing beneficial tactile feedback represents a core ethical challenge in collaborative robot development.
Privacy and data protection represent primary ethical concerns in tactile sensing applications. Collaborative robots equipped with advanced skin sensors can potentially gather intimate biometric data through touch interactions, including stress levels, emotional states, and physiological conditions. The collection of such sensitive information necessitates robust data governance frameworks that clearly define what tactile data is collected, how it is processed, and who has access to this information.
Consent mechanisms pose unique challenges in tactile sensing scenarios. Unlike visual or auditory data collection where users can be explicitly informed, tactile interactions often occur spontaneously and may not provide clear opportunities for informed consent. Establishing transparent protocols for tactile data collection becomes essential, particularly in healthcare, eldercare, and educational applications where vulnerable populations may be involved.
The algorithmic decision-making processes embedded within tactile sensing systems raise questions about autonomy and human agency. When collaborative robots interpret tactile feedback to make autonomous decisions about physical interactions, the balance between system efficiency and human control becomes critical. Ensuring that humans retain meaningful oversight over robot responses to tactile input is essential for maintaining ethical interaction standards.
Bias and fairness considerations emerge when tactile sensing algorithms are trained on limited demographic datasets. Variations in skin texture, temperature, and tactile response patterns across different populations may lead to discriminatory system behaviors. Addressing these biases requires diverse training datasets and continuous monitoring of system performance across different user groups.
Safety and harm prevention represent fundamental ethical obligations in tactile sensing applications. The potential for misinterpretation of tactile signals could lead to inappropriate robot responses, potentially causing physical or psychological harm. Establishing fail-safe mechanisms and clear boundaries for tactile interaction becomes crucial for maintaining trust and ensuring user safety in collaborative environments.
Human dignity and respect must be preserved throughout tactile sensing interactions. The intimate nature of touch requires careful consideration of cultural sensitivities, personal boundaries, and individual preferences. Designing systems that respect human autonomy while providing beneficial tactile feedback represents a core ethical challenge in collaborative robot development.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!