

Evaluate Enhanced Algorithm Deployment in Sensitive Robot Skins
APR 17, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Enhanced Algorithm Deployment in Sensitive Robot Skins Background and Goals
Sensitive robot skins represent a revolutionary advancement in robotics technology, emerging from the convergence of materials science, sensor technology, and artificial intelligence. These sophisticated tactile interfaces enable robots to perceive and respond to physical interactions with unprecedented sensitivity and precision. The development trajectory spans from early pressure-sensitive materials in the 1980s to today's multi-modal sensing capabilities that can detect pressure, temperature, texture, and even chemical properties simultaneously.
The technological evolution has been driven by the increasing demand for robots that can safely and effectively interact with humans and delicate objects in unstructured environments. Traditional rigid robotic systems have proven inadequate for applications requiring nuanced tactile feedback, creating a critical gap between robotic capabilities and real-world operational requirements. This limitation has become particularly pronounced as robotics applications expand beyond industrial manufacturing into healthcare, service industries, and domestic environments.
Enhanced algorithm deployment in sensitive robot skins addresses the fundamental challenge of processing vast amounts of tactile data in real-time while maintaining system responsiveness and accuracy. Current implementations often struggle with computational bottlenecks, sensor fusion complexities, and the need for adaptive learning capabilities that can accommodate varying environmental conditions and interaction scenarios.
The primary technical objectives encompass developing algorithms that can efficiently process multi-dimensional sensory input, implement predictive tactile modeling, and enable real-time decision-making based on tactile feedback. These algorithms must demonstrate robustness across diverse operational contexts while maintaining low latency and high accuracy in tactile interpretation.
Strategic goals include establishing scalable deployment frameworks that can accommodate different robot platforms and applications, from surgical robots requiring millimeter-precision tactile feedback to service robots needing general-purpose interaction capabilities. The technology aims to bridge the gap between human-like tactile perception and robotic implementation, ultimately enabling more intuitive and safer human-robot collaboration.
The overarching vision involves creating adaptive tactile intelligence systems that can learn and improve their performance through experience, potentially revolutionizing how robots perceive and interact with their physical environment. This advancement represents a critical step toward achieving truly autonomous robotic systems capable of operating effectively in complex, dynamic environments alongside humans.
The technological evolution has been driven by the increasing demand for robots that can safely and effectively interact with humans and delicate objects in unstructured environments. Traditional rigid robotic systems have proven inadequate for applications requiring nuanced tactile feedback, creating a critical gap between robotic capabilities and real-world operational requirements. This limitation has become particularly pronounced as robotics applications expand beyond industrial manufacturing into healthcare, service industries, and domestic environments.
Enhanced algorithm deployment in sensitive robot skins addresses the fundamental challenge of processing vast amounts of tactile data in real-time while maintaining system responsiveness and accuracy. Current implementations often struggle with computational bottlenecks, sensor fusion complexities, and the need for adaptive learning capabilities that can accommodate varying environmental conditions and interaction scenarios.
The primary technical objectives encompass developing algorithms that can efficiently process multi-dimensional sensory input, implement predictive tactile modeling, and enable real-time decision-making based on tactile feedback. These algorithms must demonstrate robustness across diverse operational contexts while maintaining low latency and high accuracy in tactile interpretation.
Strategic goals include establishing scalable deployment frameworks that can accommodate different robot platforms and applications, from surgical robots requiring millimeter-precision tactile feedback to service robots needing general-purpose interaction capabilities. The technology aims to bridge the gap between human-like tactile perception and robotic implementation, ultimately enabling more intuitive and safer human-robot collaboration.
The overarching vision involves creating adaptive tactile intelligence systems that can learn and improve their performance through experience, potentially revolutionizing how robots perceive and interact with their physical environment. This advancement represents a critical step toward achieving truly autonomous robotic systems capable of operating effectively in complex, dynamic environments alongside humans.
Market Demand for Advanced Tactile Sensing in Robotics
The global robotics industry is experiencing unprecedented growth driven by increasing automation demands across manufacturing, healthcare, service, and consumer sectors. Advanced tactile sensing capabilities have emerged as a critical differentiator for next-generation robotic systems, particularly those requiring sophisticated human-robot interaction and delicate manipulation tasks. The integration of sensitive robot skins with enhanced algorithmic processing represents a convergence of hardware innovation and software intelligence that addresses fundamental market needs.
Manufacturing automation continues to drive substantial demand for tactile-enabled robotic systems. Modern production environments require robots capable of handling diverse materials with varying textures, weights, and fragility levels. Traditional vision-based systems prove insufficient for tasks involving soft goods, food processing, or precision assembly where tactile feedback becomes essential. Enhanced algorithm deployment in sensitive robot skins enables real-time force modulation, surface texture recognition, and adaptive grip control, directly addressing these manufacturing challenges.
Healthcare robotics presents another significant market opportunity for advanced tactile sensing technologies. Surgical robots, rehabilitation devices, and elderly care assistants require sophisticated touch sensitivity to ensure patient safety and treatment efficacy. The ability to detect subtle pressure variations, temperature changes, and surface irregularities through algorithmic enhancement of tactile data creates new possibilities for minimally invasive procedures and personalized care delivery.
Consumer and service robotics markets are rapidly expanding as robots enter domestic environments and public spaces. Personal assistant robots, cleaning systems, and companion devices must navigate complex environments while safely interacting with humans and delicate objects. Enhanced tactile algorithms enable these systems to distinguish between different materials, adjust handling techniques dynamically, and respond appropriately to unexpected contact scenarios.
The automotive industry represents an emerging application area where tactile-sensing robots support quality control processes, interior assembly, and material handling operations. Enhanced algorithms processing tactile data can detect surface defects, ensure proper component alignment, and maintain consistent assembly quality standards that traditional automation struggles to achieve.
Research institutions and technology companies are investing heavily in tactile sensing solutions as the technology matures from laboratory concepts to commercial applications. The convergence of artificial intelligence, machine learning, and advanced sensor technologies creates opportunities for breakthrough innovations in robot skin sensitivity and algorithmic processing capabilities.
Market demand is further amplified by the growing emphasis on collaborative robotics, where humans and robots work in shared environments. Enhanced tactile sensing with sophisticated algorithmic processing ensures safe interaction protocols while maintaining operational efficiency across diverse industrial and service applications.
Manufacturing automation continues to drive substantial demand for tactile-enabled robotic systems. Modern production environments require robots capable of handling diverse materials with varying textures, weights, and fragility levels. Traditional vision-based systems prove insufficient for tasks involving soft goods, food processing, or precision assembly where tactile feedback becomes essential. Enhanced algorithm deployment in sensitive robot skins enables real-time force modulation, surface texture recognition, and adaptive grip control, directly addressing these manufacturing challenges.
Healthcare robotics presents another significant market opportunity for advanced tactile sensing technologies. Surgical robots, rehabilitation devices, and elderly care assistants require sophisticated touch sensitivity to ensure patient safety and treatment efficacy. The ability to detect subtle pressure variations, temperature changes, and surface irregularities through algorithmic enhancement of tactile data creates new possibilities for minimally invasive procedures and personalized care delivery.
Consumer and service robotics markets are rapidly expanding as robots enter domestic environments and public spaces. Personal assistant robots, cleaning systems, and companion devices must navigate complex environments while safely interacting with humans and delicate objects. Enhanced tactile algorithms enable these systems to distinguish between different materials, adjust handling techniques dynamically, and respond appropriately to unexpected contact scenarios.
The automotive industry represents an emerging application area where tactile-sensing robots support quality control processes, interior assembly, and material handling operations. Enhanced algorithms processing tactile data can detect surface defects, ensure proper component alignment, and maintain consistent assembly quality standards that traditional automation struggles to achieve.
Research institutions and technology companies are investing heavily in tactile sensing solutions as the technology matures from laboratory concepts to commercial applications. The convergence of artificial intelligence, machine learning, and advanced sensor technologies creates opportunities for breakthrough innovations in robot skin sensitivity and algorithmic processing capabilities.
Market demand is further amplified by the growing emphasis on collaborative robotics, where humans and robots work in shared environments. Enhanced tactile sensing with sophisticated algorithmic processing ensures safe interaction protocols while maintaining operational efficiency across diverse industrial and service applications.
Current State and Challenges of Sensitive Robot Skin Technologies
Sensitive robot skin technologies have emerged as a critical frontier in robotics, enabling machines to perceive and respond to tactile stimuli with unprecedented sophistication. Current implementations primarily rely on distributed sensor networks embedded within flexible substrates, incorporating pressure-sensitive resistors, capacitive sensors, and piezoelectric elements. These systems generate continuous streams of multi-dimensional tactile data that require real-time processing to enable meaningful robotic responses.
The technological landscape is dominated by several competing approaches, each with distinct advantages and limitations. Resistive-based solutions offer cost-effectiveness and simple integration but suffer from limited sensitivity ranges and durability concerns. Capacitive sensing technologies provide superior resolution and response times, yet face challenges in noisy electromagnetic environments. Emerging optical fiber-based systems demonstrate exceptional sensitivity but require complex signal processing infrastructure.
Algorithm deployment in these systems faces significant computational constraints due to power limitations and real-time processing requirements. Current implementations typically utilize simplified filtering algorithms and basic pattern recognition techniques, often sacrificing accuracy for computational efficiency. The integration of machine learning models remains limited, with most systems relying on pre-programmed response patterns rather than adaptive learning capabilities.
Manufacturing scalability presents another substantial challenge, as current production methods struggle to maintain consistent sensor performance across large surface areas. Quality control mechanisms for distributed sensor networks remain inadequate, leading to performance variations that compromise overall system reliability. The lack of standardized testing protocols further complicates performance evaluation and comparison across different technological approaches.
Durability and environmental resilience continue to constrain practical applications. Most existing solutions demonstrate limited resistance to mechanical wear, temperature fluctuations, and chemical exposure. The integration of protective layers often reduces sensitivity, creating an inherent trade-off between robustness and performance that current technologies have yet to resolve satisfactorily.
Data processing architectures currently employed show significant limitations in handling the massive data volumes generated by high-resolution sensor arrays. Existing edge computing solutions lack the processing power required for sophisticated algorithm deployment, while cloud-based processing introduces latency issues incompatible with real-time tactile feedback requirements. This computational bottleneck represents a fundamental constraint limiting the advancement of enhanced algorithm deployment in sensitive robot skin applications.
The technological landscape is dominated by several competing approaches, each with distinct advantages and limitations. Resistive-based solutions offer cost-effectiveness and simple integration but suffer from limited sensitivity ranges and durability concerns. Capacitive sensing technologies provide superior resolution and response times, yet face challenges in noisy electromagnetic environments. Emerging optical fiber-based systems demonstrate exceptional sensitivity but require complex signal processing infrastructure.
Algorithm deployment in these systems faces significant computational constraints due to power limitations and real-time processing requirements. Current implementations typically utilize simplified filtering algorithms and basic pattern recognition techniques, often sacrificing accuracy for computational efficiency. The integration of machine learning models remains limited, with most systems relying on pre-programmed response patterns rather than adaptive learning capabilities.
Manufacturing scalability presents another substantial challenge, as current production methods struggle to maintain consistent sensor performance across large surface areas. Quality control mechanisms for distributed sensor networks remain inadequate, leading to performance variations that compromise overall system reliability. The lack of standardized testing protocols further complicates performance evaluation and comparison across different technological approaches.
Durability and environmental resilience continue to constrain practical applications. Most existing solutions demonstrate limited resistance to mechanical wear, temperature fluctuations, and chemical exposure. The integration of protective layers often reduces sensitivity, creating an inherent trade-off between robustness and performance that current technologies have yet to resolve satisfactorily.
Data processing architectures currently employed show significant limitations in handling the massive data volumes generated by high-resolution sensor arrays. Existing edge computing solutions lack the processing power required for sophisticated algorithm deployment, while cloud-based processing introduces latency issues incompatible with real-time tactile feedback requirements. This computational bottleneck represents a fundamental constraint limiting the advancement of enhanced algorithm deployment in sensitive robot skin applications.
Current Algorithm Deployment Solutions for Sensitive Robot Skins
01 Algorithm optimization through machine learning techniques
Machine learning techniques can be applied to enhance algorithm deployment performance by optimizing parameters, reducing computational complexity, and improving prediction accuracy. These techniques include neural network optimization, deep learning model compression, and adaptive learning methods that automatically adjust algorithm behavior based on runtime conditions and data characteristics.- Algorithm optimization through machine learning techniques: Machine learning techniques can be applied to enhance algorithm deployment performance by optimizing parameters, reducing computational complexity, and improving prediction accuracy. These techniques include neural network optimization, deep learning model compression, and adaptive learning methods that automatically adjust algorithm behavior based on runtime conditions and data characteristics.
- Parallel processing and distributed computing architectures: Performance enhancement can be achieved through parallel processing frameworks and distributed computing architectures that enable simultaneous execution of algorithm components across multiple processors or computing nodes. This approach reduces execution time and improves throughput by leveraging hardware resources more efficiently and implementing load balancing mechanisms.
- Hardware acceleration and specialized processing units: Algorithm performance can be significantly improved by utilizing specialized hardware accelerators such as graphics processing units, field-programmable gate arrays, or application-specific integrated circuits. These hardware solutions provide optimized execution environments for specific algorithm types, enabling faster processing speeds and reduced power consumption compared to general-purpose processors.
- Adaptive resource allocation and dynamic scheduling: Dynamic resource allocation strategies and intelligent scheduling mechanisms can optimize algorithm deployment by adjusting computational resources based on workload demands, priority levels, and system constraints. These methods include predictive resource provisioning, real-time task scheduling, and automated scaling techniques that ensure efficient utilization of available computing infrastructure.
- Algorithm caching and preprocessing optimization: Performance improvements can be realized through intelligent caching strategies and preprocessing optimization techniques that reduce redundant computations and minimize data access latency. These approaches include result caching, intermediate data storage, data preprocessing pipelines, and incremental computation methods that reuse previously computed results when processing similar inputs.
02 Parallel processing and distributed computing architectures
Performance enhancement can be achieved through parallel processing frameworks and distributed computing architectures that enable simultaneous execution of algorithm components across multiple processors or computing nodes. This approach reduces execution time and increases throughput by dividing computational tasks and leveraging hardware resources more efficiently.Expand Specific Solutions03 Hardware acceleration and specialized processing units
Deploying algorithms on specialized hardware such as GPUs, FPGAs, or custom accelerators can significantly improve performance. Hardware acceleration techniques involve optimizing algorithm implementations to leverage specific architectural features, memory hierarchies, and parallel processing capabilities of specialized computing units.Expand Specific Solutions04 Dynamic resource allocation and load balancing
Performance can be enhanced through intelligent resource management systems that dynamically allocate computational resources based on workload demands and system conditions. Load balancing mechanisms distribute processing tasks across available resources to prevent bottlenecks and optimize overall system utilization and response times.Expand Specific Solutions05 Algorithm caching and preprocessing optimization
Deployment performance can be improved through caching strategies that store frequently accessed data or intermediate results, and preprocessing techniques that prepare data in optimized formats before algorithm execution. These methods reduce redundant computations and data access latency, resulting in faster overall execution times.Expand Specific Solutions
Core Innovations in Enhanced Algorithms for Tactile Processing
High-sensitivity intelligent robot skin
PatentActiveCN104827491A
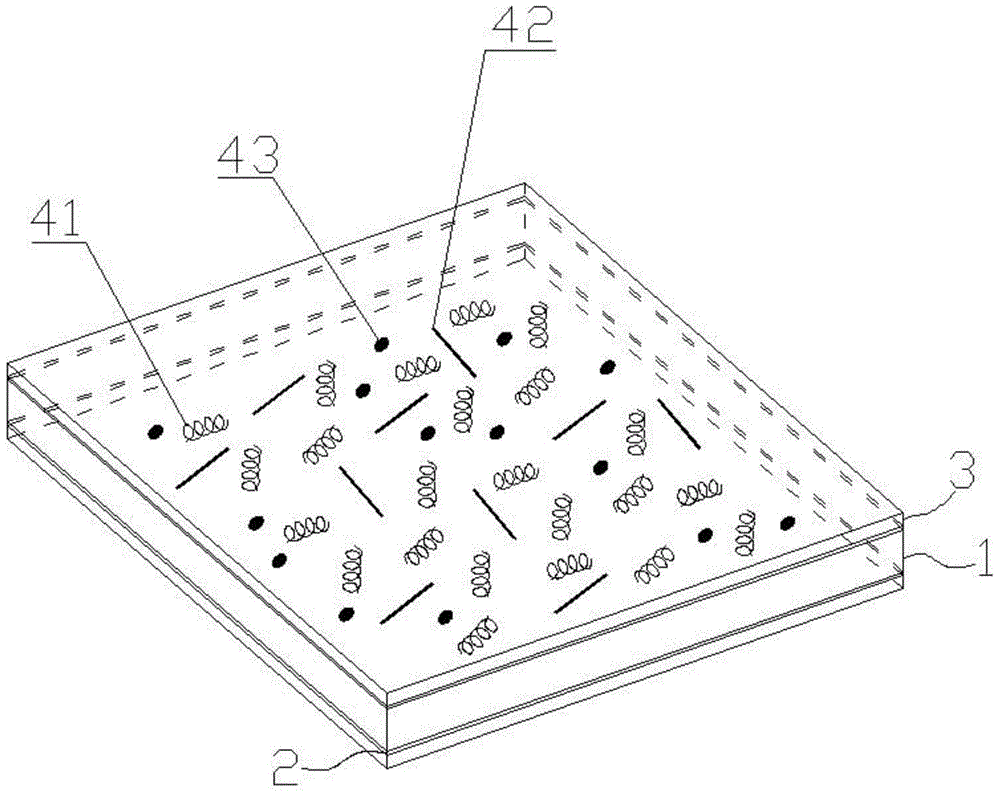
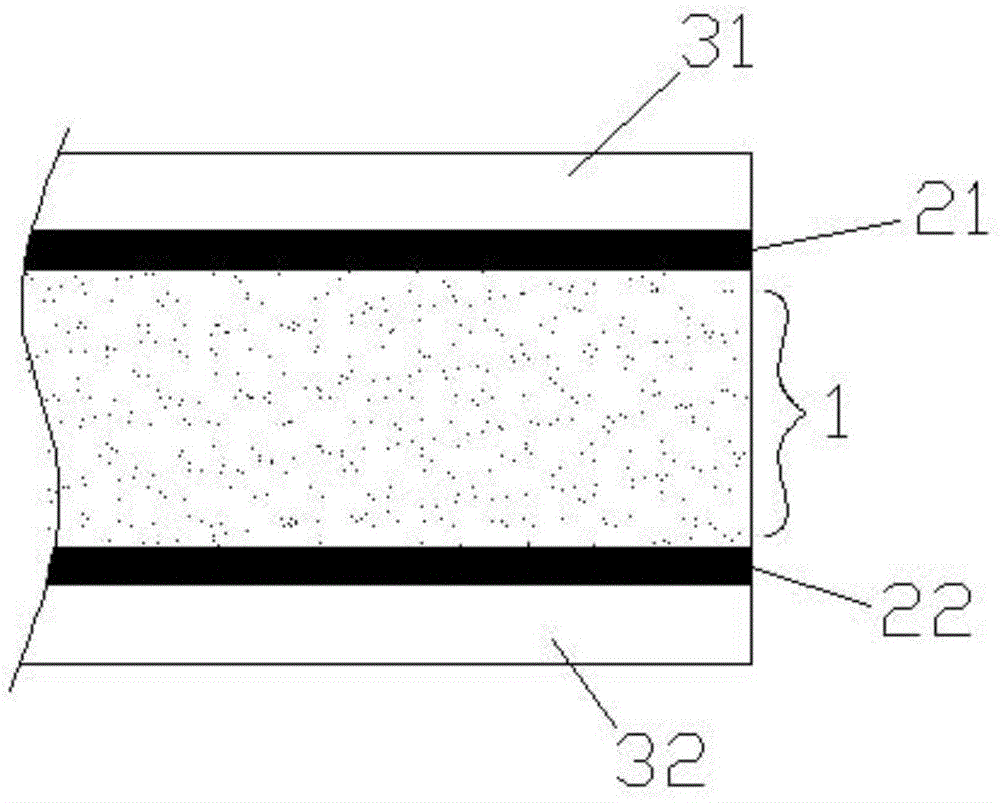
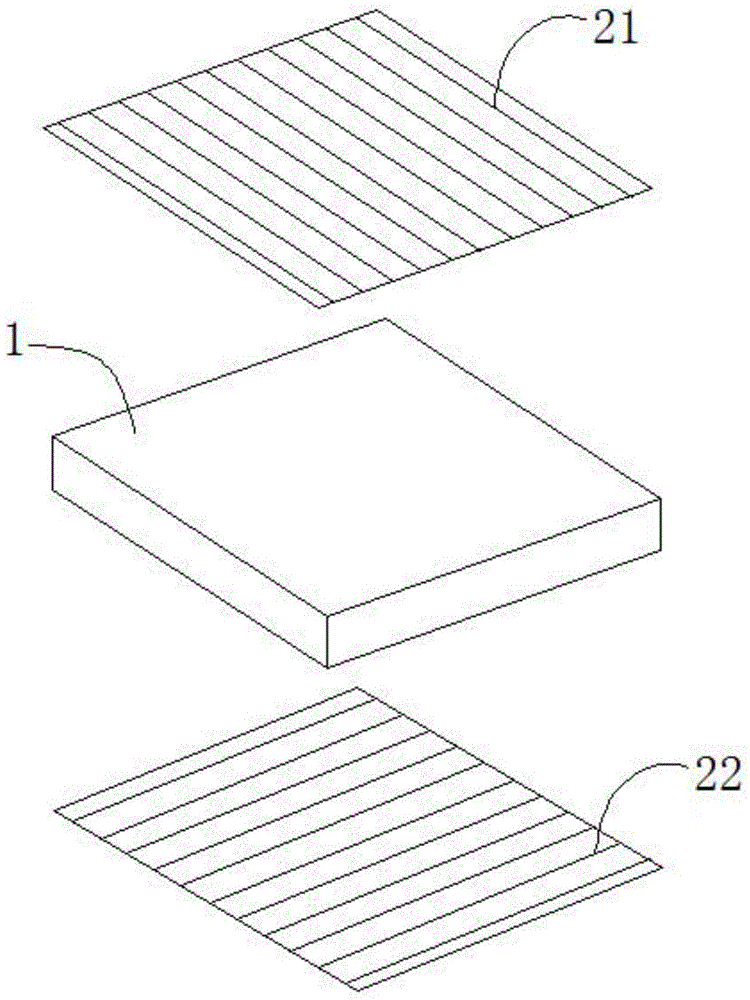
Innovation
- Using a conductive monomer and polymer-doped composite layer, the electrode layer is plated, and the outer layer is wrapped, including conductive micro-springs, fibers and particles, combined with electroplated or chemically plated conductive lines and polymer films to form a soft composite structure. Simulates the tactile sensation of human skin.

Variable-stiffness electronic skin sensor for enhancing sensing ability of robot and preparation method of variable-stiffness electronic skin sensor
PatentPendingCN117760492A
Innovation
- Design a variable stiffness electronic skin sensor. By filling iron particles in the insulating pipeline, and adsorbing the iron particles to the inner wall of the insulating pipeline under the action of an external magnetic field, the deformation and stiffness adjustment of the sensor can be achieved. Combining carbon nanoconductive materials and water Gel matrix material to enhance perception.




Safety Standards and Regulations for Sensitive Robotic Systems
The deployment of enhanced algorithms in sensitive robot skins necessitates comprehensive safety standards and regulatory frameworks to ensure reliable operation in human-robot interaction scenarios. Current international standards such as ISO 10218 for industrial robots and ISO 13482 for personal care robots provide foundational safety requirements, but these frameworks require significant expansion to address the unique challenges posed by tactile sensing systems and real-time algorithmic processing.
Regulatory bodies including the International Electrotechnical Commission (IEC) and the Institute of Electrical and Electronics Engineers (IEEE) are developing specialized standards for robotic systems with advanced sensory capabilities. The emerging IEC 61508 functional safety standard is being adapted to cover algorithm-dependent safety functions in robotic applications, while IEEE 2755 addresses ethical design processes for autonomous systems incorporating sensitive skin technologies.
Key safety considerations for sensitive robotic systems encompass algorithm validation protocols, fail-safe mechanisms, and data integrity requirements. Enhanced algorithms must demonstrate predictable behavior under various operational conditions, including sensor degradation, environmental interference, and unexpected contact scenarios. Mandatory testing protocols should include stress testing of tactile algorithms, validation of force limitation systems, and verification of emergency stop functionalities triggered by skin sensor inputs.
Certification processes for sensitive robotic systems require multi-layered approval mechanisms involving algorithm performance validation, hardware safety compliance, and integrated system testing. Regulatory frameworks must address liability concerns when algorithms make autonomous decisions based on tactile feedback, establishing clear accountability chains for system behavior.
Future regulatory developments will likely mandate algorithmic transparency requirements, enabling safety auditors to evaluate decision-making processes within sensitive skin systems. Additionally, emerging standards will need to address cybersecurity concerns, as networked robotic systems with enhanced sensing capabilities present new attack vectors that could compromise both operational safety and user privacy in human-robot collaborative environments.
Regulatory bodies including the International Electrotechnical Commission (IEC) and the Institute of Electrical and Electronics Engineers (IEEE) are developing specialized standards for robotic systems with advanced sensory capabilities. The emerging IEC 61508 functional safety standard is being adapted to cover algorithm-dependent safety functions in robotic applications, while IEEE 2755 addresses ethical design processes for autonomous systems incorporating sensitive skin technologies.
Key safety considerations for sensitive robotic systems encompass algorithm validation protocols, fail-safe mechanisms, and data integrity requirements. Enhanced algorithms must demonstrate predictable behavior under various operational conditions, including sensor degradation, environmental interference, and unexpected contact scenarios. Mandatory testing protocols should include stress testing of tactile algorithms, validation of force limitation systems, and verification of emergency stop functionalities triggered by skin sensor inputs.
Certification processes for sensitive robotic systems require multi-layered approval mechanisms involving algorithm performance validation, hardware safety compliance, and integrated system testing. Regulatory frameworks must address liability concerns when algorithms make autonomous decisions based on tactile feedback, establishing clear accountability chains for system behavior.
Future regulatory developments will likely mandate algorithmic transparency requirements, enabling safety auditors to evaluate decision-making processes within sensitive skin systems. Additionally, emerging standards will need to address cybersecurity concerns, as networked robotic systems with enhanced sensing capabilities present new attack vectors that could compromise both operational safety and user privacy in human-robot collaborative environments.
Real-time Processing Requirements for Enhanced Tactile Algorithms
Real-time processing capabilities represent the cornerstone of successful enhanced tactile algorithm deployment in sensitive robot skins. The fundamental requirement centers on achieving sub-millisecond response times to match human tactile perception thresholds, which typically operate within 1-10 milliseconds for basic touch detection and 10-100 milliseconds for complex texture recognition.
Processing latency constraints become particularly stringent when considering multi-modal tactile sensing scenarios. Enhanced algorithms must simultaneously handle pressure, temperature, vibration, and texture data streams from thousands of distributed sensors across the robot skin surface. This parallel processing demand necessitates computational architectures capable of managing data throughput rates exceeding 10 MB/s per square centimeter of sensor coverage.
Memory bandwidth requirements pose significant challenges for real-time implementation. Enhanced tactile algorithms typically employ machine learning models with substantial parameter sets, often requiring 50-200 MB of active memory for neural network weights and intermediate calculations. The continuous data flow from sensor arrays demands high-speed memory access patterns, with bandwidth requirements reaching 1-5 GB/s for comprehensive tactile processing systems.
Edge computing integration emerges as a critical architectural consideration for meeting real-time constraints. Distributed processing units embedded within the robot skin structure can perform preliminary data filtering and feature extraction, reducing the computational burden on central processing units. This approach enables parallel processing of tactile data streams while maintaining the necessary response times for reactive behaviors.
Power consumption limitations significantly impact real-time processing capabilities in mobile robotic applications. Enhanced tactile algorithms must balance computational complexity with energy efficiency, typically operating within power budgets of 1-10 watts per processing node. Advanced power management techniques, including dynamic voltage scaling and selective sensor activation, become essential for maintaining continuous real-time operation.
Synchronization requirements across distributed sensor networks introduce additional timing constraints. Enhanced algorithms must coordinate data acquisition and processing across multiple sensor clusters while maintaining temporal coherence. This synchronization challenge becomes more complex as the sensor density increases, requiring sophisticated timing protocols and buffering strategies to ensure consistent real-time performance across the entire tactile sensing system.
Processing latency constraints become particularly stringent when considering multi-modal tactile sensing scenarios. Enhanced algorithms must simultaneously handle pressure, temperature, vibration, and texture data streams from thousands of distributed sensors across the robot skin surface. This parallel processing demand necessitates computational architectures capable of managing data throughput rates exceeding 10 MB/s per square centimeter of sensor coverage.
Memory bandwidth requirements pose significant challenges for real-time implementation. Enhanced tactile algorithms typically employ machine learning models with substantial parameter sets, often requiring 50-200 MB of active memory for neural network weights and intermediate calculations. The continuous data flow from sensor arrays demands high-speed memory access patterns, with bandwidth requirements reaching 1-5 GB/s for comprehensive tactile processing systems.
Edge computing integration emerges as a critical architectural consideration for meeting real-time constraints. Distributed processing units embedded within the robot skin structure can perform preliminary data filtering and feature extraction, reducing the computational burden on central processing units. This approach enables parallel processing of tactile data streams while maintaining the necessary response times for reactive behaviors.
Power consumption limitations significantly impact real-time processing capabilities in mobile robotic applications. Enhanced tactile algorithms must balance computational complexity with energy efficiency, typically operating within power budgets of 1-10 watts per processing node. Advanced power management techniques, including dynamic voltage scaling and selective sensor activation, become essential for maintaining continuous real-time operation.
Synchronization requirements across distributed sensor networks introduce additional timing constraints. Enhanced algorithms must coordinate data acquisition and processing across multiple sensor clusters while maintaining temporal coherence. This synchronization challenge becomes more complex as the sensor density increases, requiring sophisticated timing protocols and buffering strategies to ensure consistent real-time performance across the entire tactile sensing system.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!