

How to Develop Cloud-Integrated Feedback for Robot Skins
APR 17, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Cloud-Integrated Robot Skin Technology Background and Objectives
Robot skin technology represents a transformative advancement in robotics, enabling machines to perceive and interact with their environment through tactile sensing capabilities that mimic biological skin functions. This technology has evolved from basic pressure-sensitive surfaces to sophisticated multi-modal sensing systems capable of detecting temperature, texture, pressure, and even chemical properties. The integration of flexible electronics, advanced materials science, and sensor miniaturization has made it possible to create artificial skin that can cover large surface areas of robotic systems.
The emergence of cloud computing and Internet of Things (IoT) technologies has opened new possibilities for enhancing robot skin capabilities through distributed processing and collective intelligence. Traditional robot skin systems rely on local processing units with limited computational resources, constraining their ability to perform complex pattern recognition, learning, and adaptive responses. Cloud integration addresses these limitations by leveraging virtually unlimited computational power, advanced machine learning algorithms, and vast databases of tactile experiences.
Cloud-integrated feedback systems for robot skins aim to create a paradigm where tactile data collected by individual robots contributes to a shared knowledge base, enabling continuous improvement in tactile perception and response strategies. This approach transforms isolated robotic systems into interconnected entities that can benefit from collective learning experiences, similar to how biological organisms learn from their species' accumulated knowledge.
The primary objective of developing cloud-integrated feedback for robot skins is to enhance the tactile intelligence of robotic systems beyond what is achievable through standalone processing. This includes real-time pattern recognition for complex tactile scenarios, predictive modeling for material properties and object characteristics, and adaptive learning algorithms that improve performance over time. The system should enable robots to recognize previously encountered textures, predict object properties based on initial contact, and share successful manipulation strategies with other robots in the network.
Another critical objective involves establishing robust communication protocols and data management systems that can handle the continuous stream of high-resolution tactile data while maintaining low latency for real-time applications. The system must balance the need for comprehensive data sharing with practical constraints such as bandwidth limitations, privacy concerns, and system reliability requirements.
The ultimate goal is to create an ecosystem where robot skin technology becomes increasingly sophisticated through collective intelligence, enabling applications in healthcare, manufacturing, service robotics, and human-robot interaction that require nuanced tactile understanding and responsive feedback mechanisms.
The emergence of cloud computing and Internet of Things (IoT) technologies has opened new possibilities for enhancing robot skin capabilities through distributed processing and collective intelligence. Traditional robot skin systems rely on local processing units with limited computational resources, constraining their ability to perform complex pattern recognition, learning, and adaptive responses. Cloud integration addresses these limitations by leveraging virtually unlimited computational power, advanced machine learning algorithms, and vast databases of tactile experiences.
Cloud-integrated feedback systems for robot skins aim to create a paradigm where tactile data collected by individual robots contributes to a shared knowledge base, enabling continuous improvement in tactile perception and response strategies. This approach transforms isolated robotic systems into interconnected entities that can benefit from collective learning experiences, similar to how biological organisms learn from their species' accumulated knowledge.
The primary objective of developing cloud-integrated feedback for robot skins is to enhance the tactile intelligence of robotic systems beyond what is achievable through standalone processing. This includes real-time pattern recognition for complex tactile scenarios, predictive modeling for material properties and object characteristics, and adaptive learning algorithms that improve performance over time. The system should enable robots to recognize previously encountered textures, predict object properties based on initial contact, and share successful manipulation strategies with other robots in the network.
Another critical objective involves establishing robust communication protocols and data management systems that can handle the continuous stream of high-resolution tactile data while maintaining low latency for real-time applications. The system must balance the need for comprehensive data sharing with practical constraints such as bandwidth limitations, privacy concerns, and system reliability requirements.
The ultimate goal is to create an ecosystem where robot skin technology becomes increasingly sophisticated through collective intelligence, enabling applications in healthcare, manufacturing, service robotics, and human-robot interaction that require nuanced tactile understanding and responsive feedback mechanisms.
Market Demand for Tactile-Enabled Cloud Robotics
The global robotics market is experiencing unprecedented growth driven by increasing automation demands across manufacturing, healthcare, logistics, and service sectors. Traditional industrial robots, while effective for repetitive tasks, face significant limitations in environments requiring delicate manipulation and adaptive responses. This gap has created substantial market demand for tactile-enabled robotic systems that can perceive, process, and respond to physical interactions with human-like sensitivity.
Manufacturing industries represent the largest market segment for tactile-enabled cloud robotics, particularly in electronics assembly, automotive production, and precision manufacturing. These sectors require robots capable of handling fragile components, performing quality inspections through touch, and adapting to variations in materials and surfaces. The integration of cloud-based processing enables real-time analysis of tactile data, allowing for immediate adjustments and learning from collective experiences across robot fleets.
Healthcare applications constitute another rapidly expanding market segment. Surgical robots equipped with tactile feedback systems can provide surgeons with enhanced precision and safety during minimally invasive procedures. Rehabilitation robotics and assistive devices for elderly care increasingly demand sophisticated touch sensing capabilities to ensure safe and comfortable human-robot interactions. Cloud integration enables these systems to continuously improve through shared learning from medical procedures worldwide.
The logistics and warehousing sector presents significant opportunities for tactile-enabled robotics, particularly in e-commerce fulfillment centers where robots must handle diverse products with varying fragility levels. Cloud-integrated feedback systems allow these robots to adapt their grip strength and manipulation strategies based on real-time tactile information and historical data from similar handling scenarios.
Service robotics, including domestic assistance and hospitality applications, represents an emerging high-growth market segment. Consumers increasingly expect robots to perform tasks requiring delicate touch, such as food preparation, cleaning, and personal care assistance. Cloud connectivity enables these robots to benefit from collective learning experiences, improving their performance through shared tactile knowledge databases.
The market demand is further amplified by advances in artificial intelligence and machine learning algorithms that can process complex tactile data streams. Organizations seek solutions that combine local tactile processing with cloud-based analytics to achieve optimal response times while leveraging collective intelligence for continuous improvement and adaptation to new scenarios.
Manufacturing industries represent the largest market segment for tactile-enabled cloud robotics, particularly in electronics assembly, automotive production, and precision manufacturing. These sectors require robots capable of handling fragile components, performing quality inspections through touch, and adapting to variations in materials and surfaces. The integration of cloud-based processing enables real-time analysis of tactile data, allowing for immediate adjustments and learning from collective experiences across robot fleets.
Healthcare applications constitute another rapidly expanding market segment. Surgical robots equipped with tactile feedback systems can provide surgeons with enhanced precision and safety during minimally invasive procedures. Rehabilitation robotics and assistive devices for elderly care increasingly demand sophisticated touch sensing capabilities to ensure safe and comfortable human-robot interactions. Cloud integration enables these systems to continuously improve through shared learning from medical procedures worldwide.
The logistics and warehousing sector presents significant opportunities for tactile-enabled robotics, particularly in e-commerce fulfillment centers where robots must handle diverse products with varying fragility levels. Cloud-integrated feedback systems allow these robots to adapt their grip strength and manipulation strategies based on real-time tactile information and historical data from similar handling scenarios.
Service robotics, including domestic assistance and hospitality applications, represents an emerging high-growth market segment. Consumers increasingly expect robots to perform tasks requiring delicate touch, such as food preparation, cleaning, and personal care assistance. Cloud connectivity enables these robots to benefit from collective learning experiences, improving their performance through shared tactile knowledge databases.
The market demand is further amplified by advances in artificial intelligence and machine learning algorithms that can process complex tactile data streams. Organizations seek solutions that combine local tactile processing with cloud-based analytics to achieve optimal response times while leveraging collective intelligence for continuous improvement and adaptation to new scenarios.
Current State of Robot Skin and Cloud Integration Challenges
Robot skin technology has evolved significantly over the past decade, transitioning from basic tactile sensors to sophisticated multi-modal sensing systems capable of detecting pressure, temperature, vibration, and proximity. Current implementations primarily utilize distributed sensor networks embedded in flexible substrates, employing technologies such as capacitive sensing, piezoresistive materials, and optical fiber sensors. However, these systems predominantly operate as standalone units with limited computational capabilities and basic local processing.
The integration of cloud computing with robot skin systems remains in its nascent stages, with most existing solutions relying on edge computing or local processing units. Current robot skin architectures typically process sensory data through embedded microcontrollers or dedicated signal processing units, which limits their ability to perform complex pattern recognition, machine learning inference, or adaptive behavior modification based on accumulated experience.
Several fundamental challenges impede the seamless integration of cloud services with robot skin systems. Latency represents the most critical obstacle, as tactile feedback requires near real-time processing with response times typically under 10 milliseconds for effective haptic interaction. Current cloud communication protocols and network infrastructure introduce delays ranging from 50-200 milliseconds, making direct cloud processing unsuitable for immediate tactile responses.
Bandwidth limitations pose another significant constraint, particularly for high-resolution robot skin systems that generate substantial data volumes. Advanced robot skin prototypes can produce sensor data rates exceeding 1 MB/s per square meter of coverage, creating substantial transmission overhead when attempting to stream raw sensor data to cloud platforms for processing.
Data security and privacy concerns further complicate cloud integration efforts. Robot skin systems often operate in sensitive environments where tactile data may contain proprietary information about handled objects, manufacturing processes, or human interaction patterns. Existing cloud security frameworks lack specialized protocols for protecting tactile sensor data streams and ensuring secure bidirectional communication channels.
Standardization gaps represent an additional barrier, as current robot skin technologies employ diverse communication protocols, data formats, and sensor architectures. The absence of unified standards for cloud-robot skin interfaces hampers interoperability and scalable deployment across different robotic platforms and cloud service providers.
Power consumption challenges also emerge when implementing cloud connectivity in robot skin systems. Continuous wireless communication and data transmission significantly increase energy requirements, potentially limiting operational duration for battery-powered robotic systems. Current wireless communication modules consume 100-500 milliwatts during active transmission, representing a substantial portion of available power budgets for mobile robots.
The integration of cloud computing with robot skin systems remains in its nascent stages, with most existing solutions relying on edge computing or local processing units. Current robot skin architectures typically process sensory data through embedded microcontrollers or dedicated signal processing units, which limits their ability to perform complex pattern recognition, machine learning inference, or adaptive behavior modification based on accumulated experience.
Several fundamental challenges impede the seamless integration of cloud services with robot skin systems. Latency represents the most critical obstacle, as tactile feedback requires near real-time processing with response times typically under 10 milliseconds for effective haptic interaction. Current cloud communication protocols and network infrastructure introduce delays ranging from 50-200 milliseconds, making direct cloud processing unsuitable for immediate tactile responses.
Bandwidth limitations pose another significant constraint, particularly for high-resolution robot skin systems that generate substantial data volumes. Advanced robot skin prototypes can produce sensor data rates exceeding 1 MB/s per square meter of coverage, creating substantial transmission overhead when attempting to stream raw sensor data to cloud platforms for processing.
Data security and privacy concerns further complicate cloud integration efforts. Robot skin systems often operate in sensitive environments where tactile data may contain proprietary information about handled objects, manufacturing processes, or human interaction patterns. Existing cloud security frameworks lack specialized protocols for protecting tactile sensor data streams and ensuring secure bidirectional communication channels.
Standardization gaps represent an additional barrier, as current robot skin technologies employ diverse communication protocols, data formats, and sensor architectures. The absence of unified standards for cloud-robot skin interfaces hampers interoperability and scalable deployment across different robotic platforms and cloud service providers.
Power consumption challenges also emerge when implementing cloud connectivity in robot skin systems. Continuous wireless communication and data transmission significantly increase energy requirements, potentially limiting operational duration for battery-powered robotic systems. Current wireless communication modules consume 100-500 milliwatts during active transmission, representing a substantial portion of available power budgets for mobile robots.
Existing Cloud-Integrated Tactile Feedback Solutions
01 Tactile sensing arrays and pressure-sensitive materials for robot skins
Robot skins can incorporate tactile sensing arrays and pressure-sensitive materials to detect contact, force, and pressure. These sensing elements are distributed across the robot surface to provide spatial information about touch interactions. The sensors can be based on various technologies including capacitive, resistive, or piezoelectric principles, enabling robots to perceive physical contact and respond appropriately to external stimuli.- Tactile sensor arrays for robot skin applications: Robot skins can be equipped with tactile sensor arrays that detect pressure, force, and contact. These sensors are distributed across the surface to provide spatial awareness and enable robots to sense their environment through touch. The sensor arrays can utilize various technologies including capacitive, resistive, or piezoelectric sensing mechanisms to convert mechanical stimuli into electrical signals for processing.
- Flexible and stretchable electronic skin materials: Electronic skin materials for robots incorporate flexible and stretchable substrates that can conform to curved surfaces and withstand mechanical deformation. These materials maintain their sensing capabilities during bending, stretching, and twisting motions. The construction typically involves elastomeric polymers combined with conductive elements that preserve electrical connectivity under strain, enabling natural movement while maintaining sensory feedback.
- Multi-modal sensing integration in robotic skin: Advanced robot skins integrate multiple sensing modalities including temperature, proximity, vibration, and texture detection in addition to tactile sensing. This multi-modal approach provides comprehensive environmental awareness by combining different sensor types within a single skin structure. The integration enables robots to gather rich sensory information similar to biological skin, improving interaction capabilities and safety in human-robot collaboration scenarios.
- Signal processing and feedback control systems: Robot skin systems incorporate sophisticated signal processing algorithms and feedback control mechanisms to interpret sensory data and generate appropriate responses. These systems filter noise, identify contact patterns, and translate sensor readings into actionable information for robot control. The processing architecture enables real-time response to tactile stimuli and can implement learning algorithms to improve performance over time.
- Manufacturing methods for large-area robot skin coverage: Scalable manufacturing techniques enable the production of robot skins that can cover large surface areas of robotic systems. These methods include printing technologies, roll-to-roll processing, and modular assembly approaches that allow for cost-effective fabrication. The manufacturing processes ensure uniform sensor distribution, reliable electrical connections, and durability while maintaining flexibility and conformability to complex geometries.
02 Flexible and stretchable electronic skin substrates
Flexible and stretchable substrates are essential for robot skins to conform to curved surfaces and accommodate movement. These substrates can be made from elastomeric materials or flexible polymers that maintain electrical connectivity during deformation. The flexible nature allows the skin to be applied to various robot geometries while maintaining sensing capabilities, enabling natural movement without compromising sensor performance.Expand Specific Solutions03 Multi-modal sensing integration for comprehensive feedback
Robot skins can integrate multiple sensing modalities including tactile, temperature, proximity, and force sensors to provide comprehensive environmental feedback. This multi-modal approach enables robots to gather diverse information simultaneously, improving their ability to interact safely and effectively with their surroundings. The integration of different sensor types creates a more complete perception system similar to biological skin.Expand Specific Solutions04 Signal processing and feedback control systems
Advanced signal processing and control systems are implemented to interpret sensor data from robot skins and generate appropriate feedback responses. These systems can filter noise, process multiple sensor inputs simultaneously, and provide real-time feedback to robot control systems. The processing architecture enables rapid response to tactile events and supports adaptive behavior based on sensory input.Expand Specific Solutions05 Durable and protective outer layers for robot skin applications
Robot skins require durable protective outer layers that shield internal sensing components while maintaining sensitivity. These protective layers must be resistant to wear, environmental factors, and mechanical stress while allowing sensor signals to pass through. Materials and coatings are selected to balance protection with sensing performance, ensuring long-term reliability in various operating conditions.Expand Specific Solutions
Key Players in Robot Skin and Cloud Robotics Industry
The cloud-integrated feedback for robot skins technology represents an emerging field at the intersection of tactile sensing, robotics, and cloud computing, currently in its early development stage with significant growth potential. The market is experiencing nascent expansion driven by increasing demand for advanced haptic feedback systems in robotics applications, though comprehensive market size data remains limited due to the technology's novelty. Technology maturity varies considerably across key players, with established tech giants like Intel Corp. and Google LLC providing robust cloud infrastructure foundations, while specialized companies such as Tujian Technology focus on multimodal flexible tactile sensors and electronic skin systems. Academic institutions including Zhejiang University, Tongji University, and University of Maryland contribute fundamental research, alongside robotics companies like Guangdong Huayan Robotics and Shanghai Yogo Robot developing practical applications. The competitive landscape shows a fragmented ecosystem where cloud computing leaders, tactile sensor specialists, and research institutions collaborate to advance integration capabilities, indicating the technology's interdisciplinary nature and promising but still maturing commercial viability.
Shanghai Yogo Robot Co., Ltd.
Technical Solution: Shanghai Yogo Robot has developed integrated tactile sensing solutions for service robots, incorporating cloud-based feedback systems for enhanced human-robot interaction. Their approach combines flexible sensor arrays embedded in robot skins with cloud analytics for pattern recognition and adaptive response generation. The system utilizes wireless communication protocols to transmit tactile data to cloud services, where machine learning algorithms process touch patterns and generate appropriate robot responses. Their solution focuses on service robot applications, particularly in healthcare and hospitality sectors, where gentle and appropriate tactile responses are crucial. The cloud integration enables continuous learning from user interactions, improving the robot's ability to provide appropriate tactile feedback in various social contexts and environmental conditions.
Strengths: Focus on service robotics, practical deployment experience, understanding of Asian market needs. Weaknesses: Limited scale compared to major tech companies, narrower technology ecosystem.
Inspur Cloud Information Technology Co., Ltd.
Technical Solution: Inspur Cloud has developed specialized cloud infrastructure solutions for robotic applications, including tactile feedback systems for robot skins. Their platform provides high-performance computing resources optimized for real-time sensor data processing and machine learning inference. The solution includes edge computing nodes that pre-process tactile data before cloud transmission, reducing bandwidth requirements and improving response times. Their cloud architecture supports distributed sensor networks with advanced data fusion algorithms for multi-modal tactile sensing. The platform offers APIs for integrating various sensor types commonly used in robot skins, with cloud-based analytics providing insights for adaptive control systems. Their solution emphasizes scalability and reliability for industrial robotic applications requiring continuous tactile feedback processing.
Strengths: Specialized cloud infrastructure, cost-effective solutions, strong presence in Asian markets. Weaknesses: Limited global reach, less established ecosystem compared to major cloud providers.
Core Patents in Distributed Tactile Processing Systems
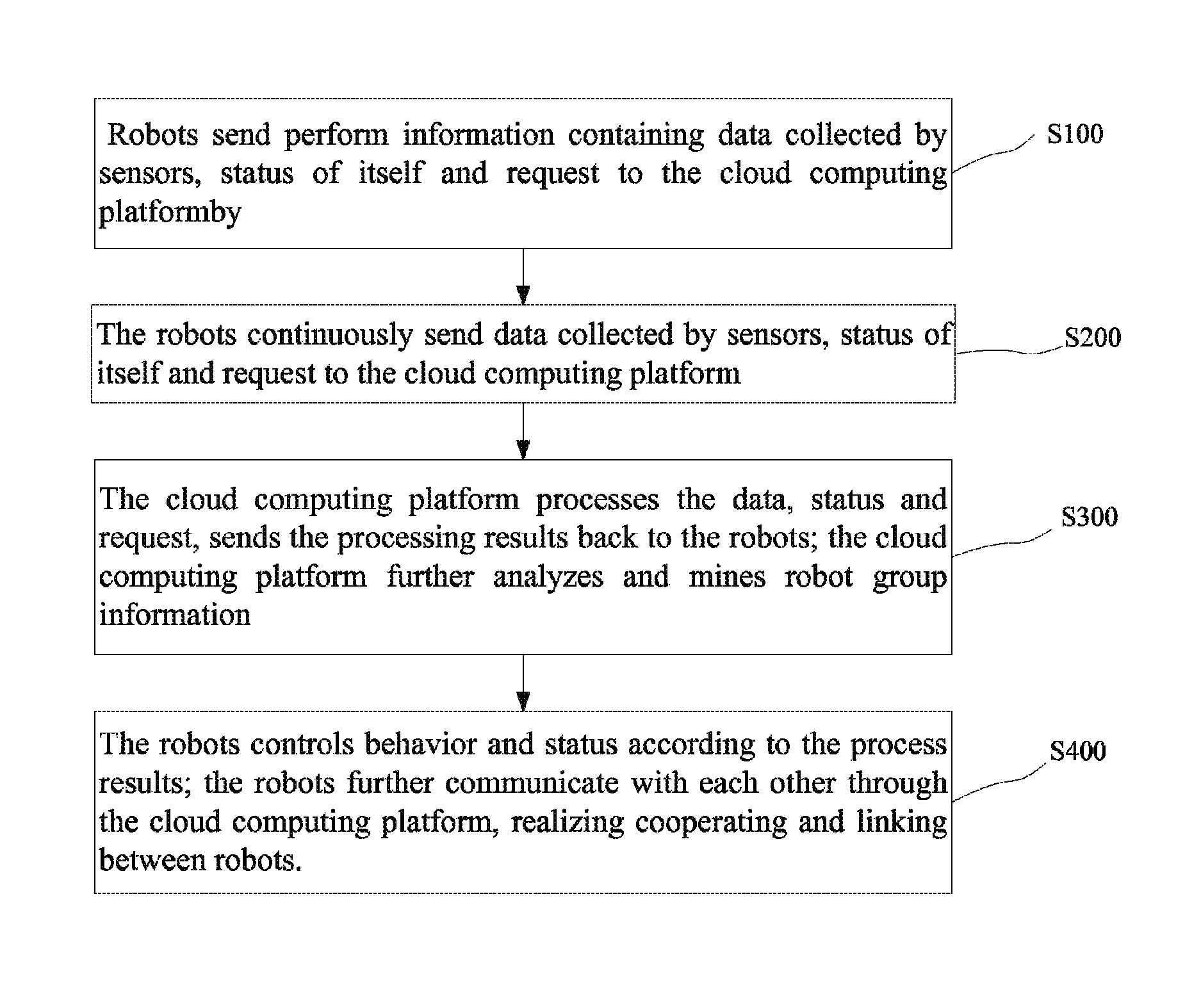
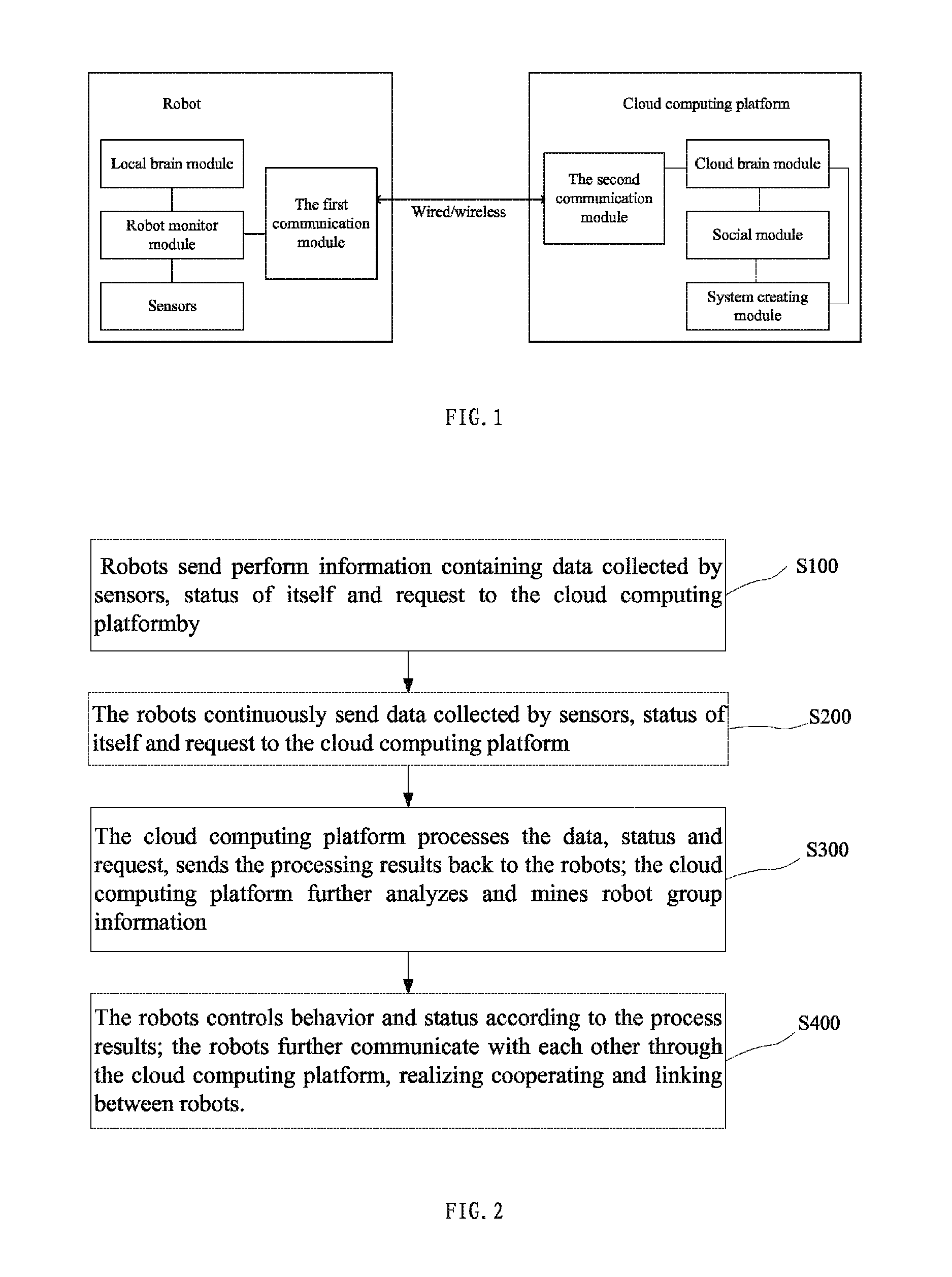
Cloud robot system and method of integrating the same
PatentActiveUS9031692B2
Innovation
- A cloud robot system that utilizes a cloud computing platform to process and manage data, status, and requests from robots, enabling scalable computing and storage resources, and facilitating efficient communication and collaboration among robots through a cloud brain module, social module, and communication modules.
Shared robot knowledge base for use with cloud computing system
PatentActiveUS8639644B1
Innovation
- A shared robot knowledge base within a cloud computing system that allows robots to query and update data on objects, tasks, and maps, enabling collective learning and improved interaction capabilities through a networked architecture.




Data Privacy and Security in Cloud Robotics
The integration of cloud computing with robotic tactile sensing systems introduces significant data privacy and security challenges that must be carefully addressed to ensure safe and reliable operation. Cloud-integrated feedback systems for robot skins generate continuous streams of sensitive tactile data that require robust protection mechanisms throughout the entire data lifecycle.
Data transmission security represents a critical vulnerability point in cloud-integrated robot skin systems. Tactile sensor data traveling between robotic platforms and cloud infrastructure must be encrypted using advanced cryptographic protocols such as TLS 1.3 or quantum-resistant encryption methods. The high-frequency nature of tactile feedback data creates additional challenges, as encryption processes must maintain real-time performance requirements while ensuring data integrity during transmission.
Privacy preservation becomes particularly complex when multiple robots share tactile learning models through cloud platforms. Differential privacy techniques and federated learning approaches offer promising solutions by enabling collaborative learning without exposing raw sensor data. These methods allow robot skin systems to benefit from collective tactile experiences while maintaining individual data privacy through mathematical guarantees and distributed processing architectures.
Authentication and access control mechanisms must address the unique challenges of robotic systems operating in dynamic environments. Multi-factor authentication protocols specifically designed for autonomous systems, including hardware-based security modules and biometric verification of human operators, are essential for preventing unauthorized access to sensitive tactile data and control systems.
Data residency and sovereignty concerns arise when tactile data crosses international boundaries through cloud infrastructure. Regulatory compliance with frameworks such as GDPR, CCPA, and emerging robotics-specific regulations requires careful consideration of data localization requirements and cross-border data transfer restrictions. Organizations must implement data governance policies that ensure tactile sensor information remains within approved jurisdictions while maintaining system functionality.
Edge computing architectures present opportunities to enhance security by processing sensitive tactile data locally before cloud transmission. Hybrid approaches that combine edge-based preprocessing with selective cloud integration can minimize exposure of raw sensor data while preserving the benefits of cloud-based learning and analytics capabilities for robot skin applications.
Data transmission security represents a critical vulnerability point in cloud-integrated robot skin systems. Tactile sensor data traveling between robotic platforms and cloud infrastructure must be encrypted using advanced cryptographic protocols such as TLS 1.3 or quantum-resistant encryption methods. The high-frequency nature of tactile feedback data creates additional challenges, as encryption processes must maintain real-time performance requirements while ensuring data integrity during transmission.
Privacy preservation becomes particularly complex when multiple robots share tactile learning models through cloud platforms. Differential privacy techniques and federated learning approaches offer promising solutions by enabling collaborative learning without exposing raw sensor data. These methods allow robot skin systems to benefit from collective tactile experiences while maintaining individual data privacy through mathematical guarantees and distributed processing architectures.
Authentication and access control mechanisms must address the unique challenges of robotic systems operating in dynamic environments. Multi-factor authentication protocols specifically designed for autonomous systems, including hardware-based security modules and biometric verification of human operators, are essential for preventing unauthorized access to sensitive tactile data and control systems.
Data residency and sovereignty concerns arise when tactile data crosses international boundaries through cloud infrastructure. Regulatory compliance with frameworks such as GDPR, CCPA, and emerging robotics-specific regulations requires careful consideration of data localization requirements and cross-border data transfer restrictions. Organizations must implement data governance policies that ensure tactile sensor information remains within approved jurisdictions while maintaining system functionality.
Edge computing architectures present opportunities to enhance security by processing sensitive tactile data locally before cloud transmission. Hybrid approaches that combine edge-based preprocessing with selective cloud integration can minimize exposure of raw sensor data while preserving the benefits of cloud-based learning and analytics capabilities for robot skin applications.
Real-Time Latency Optimization Strategies
Real-time latency optimization represents a critical challenge in cloud-integrated robot skin systems, where tactile feedback must be processed and transmitted with minimal delay to maintain effective human-robot interaction. The fundamental requirement for these systems is achieving end-to-end latency below 10 milliseconds for critical safety applications, while maintaining acceptable performance under 50 milliseconds for general manipulation tasks.
Edge computing architectures emerge as the primary strategy for reducing communication latency between robot skins and cloud processing centers. By deploying lightweight processing nodes closer to robotic systems, initial sensor data filtering and preprocessing can occur locally, reducing the volume of data transmitted to central cloud servers. This distributed approach typically achieves 30-40% latency reduction compared to direct cloud communication.
Network protocol optimization plays a crucial role in minimizing transmission delays. Implementation of UDP-based communication protocols, combined with custom packet compression algorithms, significantly outperforms traditional TCP connections for time-sensitive tactile data. Advanced implementations utilize 5G network slicing to guarantee dedicated bandwidth and priority routing for robot skin feedback systems.
Predictive caching mechanisms represent an innovative approach to latency mitigation. Machine learning algorithms analyze historical interaction patterns to preload frequently accessed tactile response models at edge nodes. This proactive strategy reduces processing delays by up to 60% for repetitive manipulation tasks, though effectiveness varies based on task predictability.
Dynamic load balancing across multiple cloud processing centers ensures optimal resource allocation during peak demand periods. Intelligent routing algorithms continuously monitor server response times and automatically redirect processing requests to the most responsive available nodes. This approach maintains consistent performance even under varying network conditions.
Sensor data prioritization strategies enable selective processing of critical tactile information. High-priority safety-related signals receive immediate processing pathways, while lower-priority environmental data can tolerate slightly higher latencies. This hierarchical approach ensures that essential feedback reaches robotic control systems within required timeframes while optimizing overall system efficiency.
Edge computing architectures emerge as the primary strategy for reducing communication latency between robot skins and cloud processing centers. By deploying lightweight processing nodes closer to robotic systems, initial sensor data filtering and preprocessing can occur locally, reducing the volume of data transmitted to central cloud servers. This distributed approach typically achieves 30-40% latency reduction compared to direct cloud communication.
Network protocol optimization plays a crucial role in minimizing transmission delays. Implementation of UDP-based communication protocols, combined with custom packet compression algorithms, significantly outperforms traditional TCP connections for time-sensitive tactile data. Advanced implementations utilize 5G network slicing to guarantee dedicated bandwidth and priority routing for robot skin feedback systems.
Predictive caching mechanisms represent an innovative approach to latency mitigation. Machine learning algorithms analyze historical interaction patterns to preload frequently accessed tactile response models at edge nodes. This proactive strategy reduces processing delays by up to 60% for repetitive manipulation tasks, though effectiveness varies based on task predictability.
Dynamic load balancing across multiple cloud processing centers ensures optimal resource allocation during peak demand periods. Intelligent routing algorithms continuously monitor server response times and automatically redirect processing requests to the most responsive available nodes. This approach maintains consistent performance even under varying network conditions.
Sensor data prioritization strategies enable selective processing of critical tactile information. High-priority safety-related signals receive immediate processing pathways, while lower-priority environmental data can tolerate slightly higher latencies. This hierarchical approach ensures that essential feedback reaches robotic control systems within required timeframes while optimizing overall system efficiency.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!