

Robot Skin Prototypes: Iterative vs Dynamic Design Models
APR 17, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Robot Skin Technology Background and Development Goals
Robot skin technology represents a critical frontier in robotics research, emerging from the fundamental need to enable robots to interact safely and effectively with their environment and humans. This technology encompasses the development of artificial tactile sensing systems that can replicate or enhance the sensory capabilities of biological skin, providing robots with essential feedback for manipulation, navigation, and human-robot interaction tasks.
The evolution of robot skin technology has been driven by advances in materials science, sensor miniaturization, and signal processing capabilities. Early developments in the 1980s focused on basic pressure-sensitive arrays, while contemporary research has expanded to include multi-modal sensing capabilities incorporating temperature, texture, proximity, and even chemical detection. The integration of flexible electronics and soft robotics principles has further accelerated progress in creating skin-like interfaces that can conform to complex geometries.
Current technological objectives center on achieving human-level tactile sensitivity while maintaining robustness for industrial applications. Key performance targets include spatial resolution approaching 1-2mm, response times under 10 milliseconds, and the ability to detect forces ranging from millinewtons to several newtons. Additionally, researchers are pursuing self-healing capabilities, wireless data transmission, and energy harvesting functionalities to create truly autonomous tactile systems.
The distinction between iterative and dynamic design models has become increasingly relevant as the field matures. Iterative approaches focus on systematic refinement of established sensor architectures, emphasizing reliability and manufacturability. These models typically involve incremental improvements to existing technologies such as capacitive, resistive, or piezoelectric sensing elements, with well-defined development cycles and predictable outcomes.
Dynamic design models, conversely, embrace adaptive and reconfigurable sensing architectures that can modify their properties in real-time based on task requirements or environmental conditions. These approaches leverage emerging technologies such as liquid metal conductors, shape-memory alloys, and programmable materials to create sensing systems that can dynamically adjust their sensitivity, spatial resolution, or sensing modalities.
The strategic importance of robot skin technology extends across multiple application domains, from healthcare robotics requiring gentle human interaction to industrial automation demanding precise force feedback. As robots increasingly operate in unstructured environments alongside humans, the development of sophisticated tactile sensing capabilities becomes essential for ensuring both safety and performance effectiveness in next-generation robotic systems.
The evolution of robot skin technology has been driven by advances in materials science, sensor miniaturization, and signal processing capabilities. Early developments in the 1980s focused on basic pressure-sensitive arrays, while contemporary research has expanded to include multi-modal sensing capabilities incorporating temperature, texture, proximity, and even chemical detection. The integration of flexible electronics and soft robotics principles has further accelerated progress in creating skin-like interfaces that can conform to complex geometries.
Current technological objectives center on achieving human-level tactile sensitivity while maintaining robustness for industrial applications. Key performance targets include spatial resolution approaching 1-2mm, response times under 10 milliseconds, and the ability to detect forces ranging from millinewtons to several newtons. Additionally, researchers are pursuing self-healing capabilities, wireless data transmission, and energy harvesting functionalities to create truly autonomous tactile systems.
The distinction between iterative and dynamic design models has become increasingly relevant as the field matures. Iterative approaches focus on systematic refinement of established sensor architectures, emphasizing reliability and manufacturability. These models typically involve incremental improvements to existing technologies such as capacitive, resistive, or piezoelectric sensing elements, with well-defined development cycles and predictable outcomes.
Dynamic design models, conversely, embrace adaptive and reconfigurable sensing architectures that can modify their properties in real-time based on task requirements or environmental conditions. These approaches leverage emerging technologies such as liquid metal conductors, shape-memory alloys, and programmable materials to create sensing systems that can dynamically adjust their sensitivity, spatial resolution, or sensing modalities.
The strategic importance of robot skin technology extends across multiple application domains, from healthcare robotics requiring gentle human interaction to industrial automation demanding precise force feedback. As robots increasingly operate in unstructured environments alongside humans, the development of sophisticated tactile sensing capabilities becomes essential for ensuring both safety and performance effectiveness in next-generation robotic systems.
Market Demand Analysis for Tactile Robotics Applications
The tactile robotics market is experiencing unprecedented growth driven by the convergence of artificial intelligence, advanced materials science, and increasing automation demands across multiple industries. Healthcare robotics represents the largest application segment, where tactile-enabled surgical robots and rehabilitation devices require sophisticated skin prototypes capable of providing real-time haptic feedback. The aging global population and rising healthcare costs are accelerating adoption of robotic assistants that can safely interact with patients through advanced tactile sensing capabilities.
Manufacturing and industrial automation constitute another significant demand driver, where collaborative robots equipped with tactile skin technology can work alongside human operators with enhanced safety and precision. The automotive industry particularly seeks tactile robotics solutions for quality inspection, assembly operations, and human-robot collaboration in production lines. These applications require robust skin prototypes that can withstand harsh industrial environments while maintaining sensitivity to detect minute variations in texture, pressure, and temperature.
Consumer robotics markets are emerging as a substantial growth opportunity, with household service robots, elderly care assistants, and educational robots requiring intuitive tactile interfaces. The demand for natural human-robot interaction is pushing developers toward more sophisticated skin designs that can interpret complex touch patterns and respond appropriately to human contact. Personal care robots and companion robots represent particularly promising segments where tactile sensitivity directly correlates with user acceptance and market success.
The aerospace and defense sectors present specialized requirements for tactile robotics applications, including space exploration robots that must operate in extreme environments and military applications requiring precise manipulation capabilities. These markets demand highly reliable skin prototypes with exceptional durability and performance consistency under varying environmental conditions.
Research institutions and academic markets continue to drive innovation in tactile robotics, creating demand for experimental skin prototypes that can support advanced research in neuroscience, psychology, and human-computer interaction. This segment values flexibility and customization capabilities over mass production efficiency, influencing the iterative versus dynamic design model preferences across different market segments.
Manufacturing and industrial automation constitute another significant demand driver, where collaborative robots equipped with tactile skin technology can work alongside human operators with enhanced safety and precision. The automotive industry particularly seeks tactile robotics solutions for quality inspection, assembly operations, and human-robot collaboration in production lines. These applications require robust skin prototypes that can withstand harsh industrial environments while maintaining sensitivity to detect minute variations in texture, pressure, and temperature.
Consumer robotics markets are emerging as a substantial growth opportunity, with household service robots, elderly care assistants, and educational robots requiring intuitive tactile interfaces. The demand for natural human-robot interaction is pushing developers toward more sophisticated skin designs that can interpret complex touch patterns and respond appropriately to human contact. Personal care robots and companion robots represent particularly promising segments where tactile sensitivity directly correlates with user acceptance and market success.
The aerospace and defense sectors present specialized requirements for tactile robotics applications, including space exploration robots that must operate in extreme environments and military applications requiring precise manipulation capabilities. These markets demand highly reliable skin prototypes with exceptional durability and performance consistency under varying environmental conditions.
Research institutions and academic markets continue to drive innovation in tactile robotics, creating demand for experimental skin prototypes that can support advanced research in neuroscience, psychology, and human-computer interaction. This segment values flexibility and customization capabilities over mass production efficiency, influencing the iterative versus dynamic design model preferences across different market segments.
Current State of Iterative vs Dynamic Skin Design Challenges
The development of robot skin prototypes faces fundamental challenges in choosing between iterative and dynamic design approaches, each presenting distinct technical obstacles and implementation complexities. Current research reveals significant gaps in understanding how these two methodologies can be optimally applied to achieve responsive, durable, and functionally versatile artificial skin systems.
Iterative design models encounter substantial challenges in material integration and sensor calibration. Traditional approaches rely on sequential testing and refinement cycles, which often result in prolonged development timelines and increased manufacturing costs. The primary constraint lies in achieving consistent tactile sensitivity across different prototype iterations while maintaining structural integrity. Current iterative prototypes struggle with sensor drift over time, requiring frequent recalibration that undermines their practical deployment potential.
Dynamic design models face equally complex challenges, particularly in real-time adaptability and computational processing requirements. These systems demand sophisticated algorithms capable of instantaneous response to environmental stimuli while managing power consumption constraints. The integration of multiple sensing modalities within dynamic frameworks creates interference issues that current filtering technologies cannot adequately address. Additionally, the mechanical flexibility required for dynamic adaptation often compromises the longevity of embedded electronic components.
Manufacturing scalability represents a critical bottleneck for both approaches. Iterative designs require extensive quality control measures at each development stage, while dynamic systems demand precision manufacturing techniques that are not yet commercially viable for large-scale production. The cost differential between laboratory prototypes and market-ready products remains prohibitively high, limiting widespread adoption and further research investment.
Cross-platform compatibility issues further complicate the current landscape. Existing robot skin prototypes demonstrate limited interoperability between different robotic platforms, necessitating custom integration solutions that increase development complexity. The absence of standardized communication protocols between skin sensors and robotic control systems creates additional barriers to technology transfer and collaborative research efforts.
Current testing methodologies also present significant limitations in evaluating the comparative effectiveness of iterative versus dynamic approaches. Standardized benchmarking protocols remain underdeveloped, making objective performance comparisons difficult and hindering evidence-based design decisions in the field.
Iterative design models encounter substantial challenges in material integration and sensor calibration. Traditional approaches rely on sequential testing and refinement cycles, which often result in prolonged development timelines and increased manufacturing costs. The primary constraint lies in achieving consistent tactile sensitivity across different prototype iterations while maintaining structural integrity. Current iterative prototypes struggle with sensor drift over time, requiring frequent recalibration that undermines their practical deployment potential.
Dynamic design models face equally complex challenges, particularly in real-time adaptability and computational processing requirements. These systems demand sophisticated algorithms capable of instantaneous response to environmental stimuli while managing power consumption constraints. The integration of multiple sensing modalities within dynamic frameworks creates interference issues that current filtering technologies cannot adequately address. Additionally, the mechanical flexibility required for dynamic adaptation often compromises the longevity of embedded electronic components.
Manufacturing scalability represents a critical bottleneck for both approaches. Iterative designs require extensive quality control measures at each development stage, while dynamic systems demand precision manufacturing techniques that are not yet commercially viable for large-scale production. The cost differential between laboratory prototypes and market-ready products remains prohibitively high, limiting widespread adoption and further research investment.
Cross-platform compatibility issues further complicate the current landscape. Existing robot skin prototypes demonstrate limited interoperability between different robotic platforms, necessitating custom integration solutions that increase development complexity. The absence of standardized communication protocols between skin sensors and robotic control systems creates additional barriers to technology transfer and collaborative research efforts.
Current testing methodologies also present significant limitations in evaluating the comparative effectiveness of iterative versus dynamic approaches. Standardized benchmarking protocols remain underdeveloped, making objective performance comparisons difficult and hindering evidence-based design decisions in the field.
Current Iterative and Dynamic Design Solution Approaches
01 Flexible and stretchable sensor integration in robot skin
Robot skin prototypes incorporate flexible and stretchable sensors that can detect various stimuli such as pressure, temperature, and strain. These sensors are embedded within elastomeric materials or polymer substrates to maintain flexibility while providing tactile feedback. The design allows the robot skin to conform to curved surfaces and withstand mechanical deformation during operation, enabling natural interaction with objects and environments.- Flexible and stretchable sensor integration in robot skin: Robot skin prototypes incorporate flexible and stretchable sensors that can detect various stimuli such as pressure, temperature, and strain. These sensors are embedded within elastic substrates or polymer matrices to maintain flexibility while providing tactile feedback. The design allows the robot skin to conform to curved surfaces and withstand mechanical deformation during operation, enabling natural interaction with objects and environments.
- Multi-layer structural design for enhanced functionality: Robot skin prototypes utilize multi-layer architectures where different layers serve specific functions such as sensing, signal processing, and protection. The layered structure typically includes a sensing layer with distributed sensors, an intermediate processing layer for signal conditioning, and an outer protective layer. This design approach enables integration of multiple sensing modalities while maintaining durability and mechanical properties suitable for robotic applications.
- Biomimetic design inspired by human skin properties: Design models for robot skin draw inspiration from biological skin structures and properties to achieve similar functionality. These prototypes replicate characteristics such as self-healing capabilities, hierarchical structures, and distributed sensing networks found in natural skin. The biomimetic approach aims to create robot skin that can adapt to various environmental conditions and provide human-like tactile perception for improved human-robot interaction.
- Modular and scalable robot skin architectures: Modular design approaches enable the creation of scalable robot skin systems that can be customized for different robotic platforms and applications. These designs feature standardized sensing units or tiles that can be assembled to cover various surface areas and geometries. The modular architecture facilitates manufacturing, maintenance, and replacement of damaged sections while allowing for integration of different sensor types based on specific application requirements.
- Advanced materials and fabrication techniques for robot skin: Robot skin prototypes employ advanced materials such as conductive polymers, nanomaterials, and soft composites combined with innovative fabrication methods including 3D printing, photolithography, and soft lithography. These materials and techniques enable the creation of thin, lightweight, and conformable skin structures with integrated sensing capabilities. The fabrication approaches allow for precise control over sensor placement, electrical interconnections, and mechanical properties to meet specific design requirements.
02 Multi-layered structure design for enhanced functionality
Robot skin prototypes utilize multi-layered architectures where different layers serve specific functions such as sensing, signal processing, and protection. The layered design typically includes a substrate layer for structural support, a sensing layer with embedded sensors, and a protective outer layer. This stratified approach enables integration of multiple sensing modalities and improves durability while maintaining the overall flexibility of the robot skin.Expand Specific Solutions03 Biomimetic design inspired by human skin properties
Design models for robot skin prototypes draw inspiration from the structure and properties of human skin, replicating characteristics such as elasticity, self-healing capabilities, and hierarchical sensing mechanisms. These biomimetic approaches aim to achieve similar mechanical properties and sensory functions as biological skin, including the ability to detect multiple stimuli simultaneously and respond to environmental changes in a manner similar to natural skin.Expand Specific Solutions04 Modular and scalable robot skin architectures
Robot skin prototypes employ modular design approaches that allow for scalability and customization based on specific robotic applications. These designs feature repeating units or tiles that can be assembled to cover various surface areas and geometries. The modular architecture facilitates easier manufacturing, maintenance, and replacement of damaged sections while enabling adaptation to different robot morphologies and sizes.Expand Specific Solutions05 Integration of signal processing and communication systems
Robot skin design models incorporate embedded electronics for signal processing, data acquisition, and wireless communication capabilities. These systems process sensory information from distributed sensors and transmit data to central control units. The integration includes considerations for power management, signal routing, and electromagnetic interference shielding to ensure reliable operation while maintaining the mechanical flexibility of the skin structure.Expand Specific Solutions
Major Players in Robot Skin and Tactile Sensing Industry
The robot skin prototypes field represents an emerging technology sector in the early development stage, characterized by significant research activity but limited commercial deployment. The market remains nascent with substantial growth potential as tactile sensing becomes increasingly critical for advanced robotics applications. Technology maturity varies considerably across different approaches, with iterative design models showing greater commercial readiness through companies like Honda Motor Co., Ltd. and UBTECH Robotics Corp. Ltd., which leverage established manufacturing capabilities. Dynamic design models remain primarily in research phases, led by academic institutions including MIT, Caltech, and Zhejiang University, alongside specialized research organizations like SRI International. The competitive landscape features a hybrid ecosystem where traditional technology giants such as Tencent Technology and Disney Enterprises collaborate with emerging robotics companies like Groove X, Inc., while defense contractors including Leidos, Inc. explore tactical applications, indicating broad cross-industry interest in advancing tactile robotics capabilities.
Zhejiang University
Technical Solution: Zhejiang University has developed innovative robot skin prototypes using hybrid iterative-dynamic design models that combine systematic development cycles with adaptive functionality. Their approach integrates bio-inspired sensing mechanisms with advanced materials science, creating skin prototypes that can modify their properties based on environmental stimuli. The iterative component involves continuous refinement of sensor integration techniques and signal processing algorithms, while the dynamic aspect enables real-time adjustment of mechanical properties and sensitivity thresholds. Their prototypes demonstrate exceptional performance in soft robotics applications and human-robot interaction scenarios.
Strengths: Strong academic research foundation with innovative bio-inspired approaches and advanced materials expertise. Weaknesses: Academic environment may limit rapid commercialization and large-scale manufacturing capabilities.
UBTECH Robotics Corp. Ltd.
Technical Solution: UBTECH implements iterative design models for robot skin development, particularly for their humanoid and service robots. Their methodology involves sequential prototype refinement focusing on cost-effective manufacturing while maintaining performance standards. The iterative approach emphasizes user feedback integration and systematic improvement of tactile sensor arrays. Their robot skin prototypes utilize flexible printed circuit technology with distributed sensing nodes that provide comprehensive touch detection capabilities. The design process prioritizes scalability and mass production feasibility, making their solutions commercially viable for consumer and educational robotics markets.
Strengths: Commercial robotics expertise with strong manufacturing and market distribution capabilities. Weaknesses: Focus on cost optimization may compromise advanced sensing capabilities compared to research institutions.
Core Patents in Adaptive Robot Skin Technologies
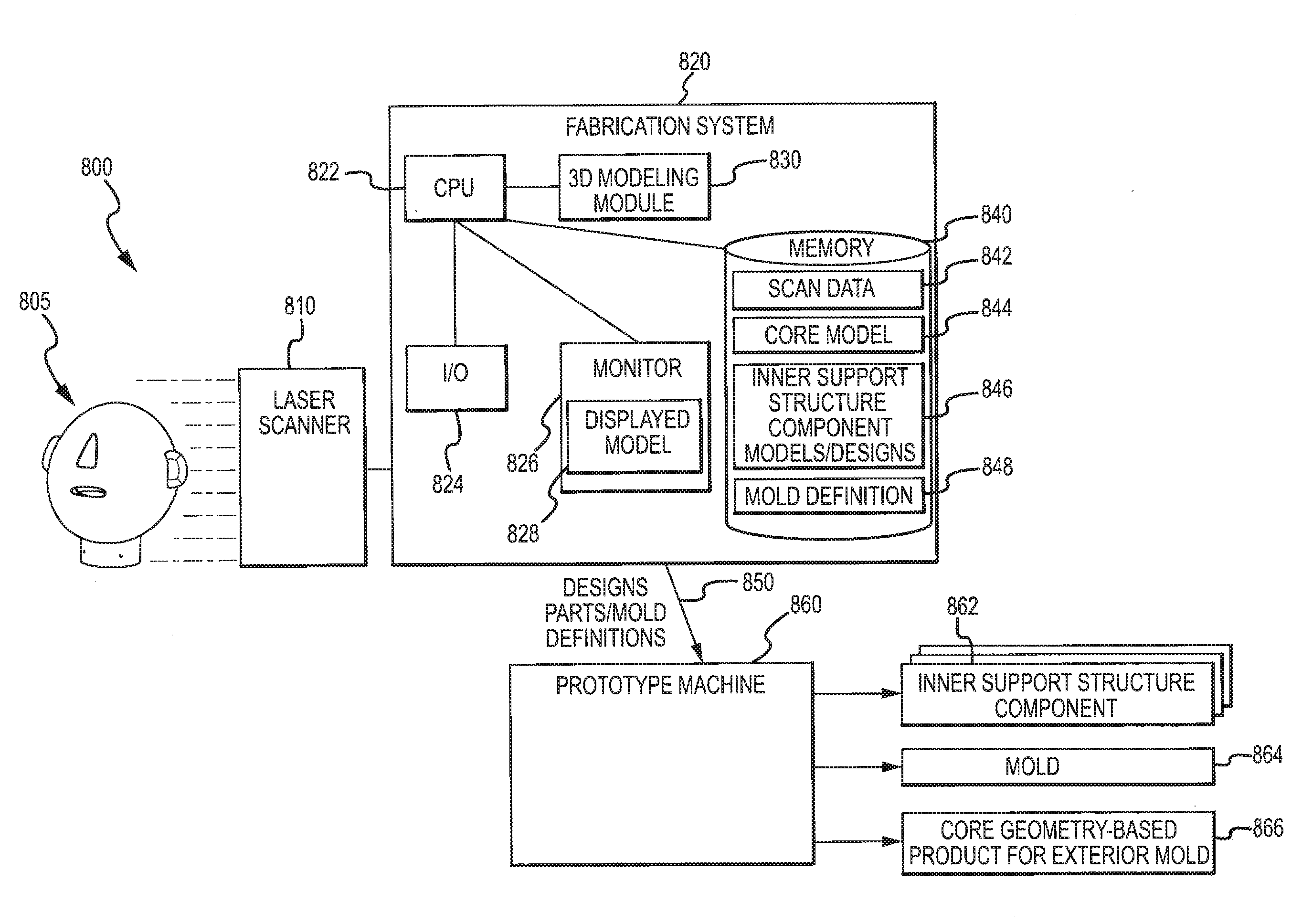
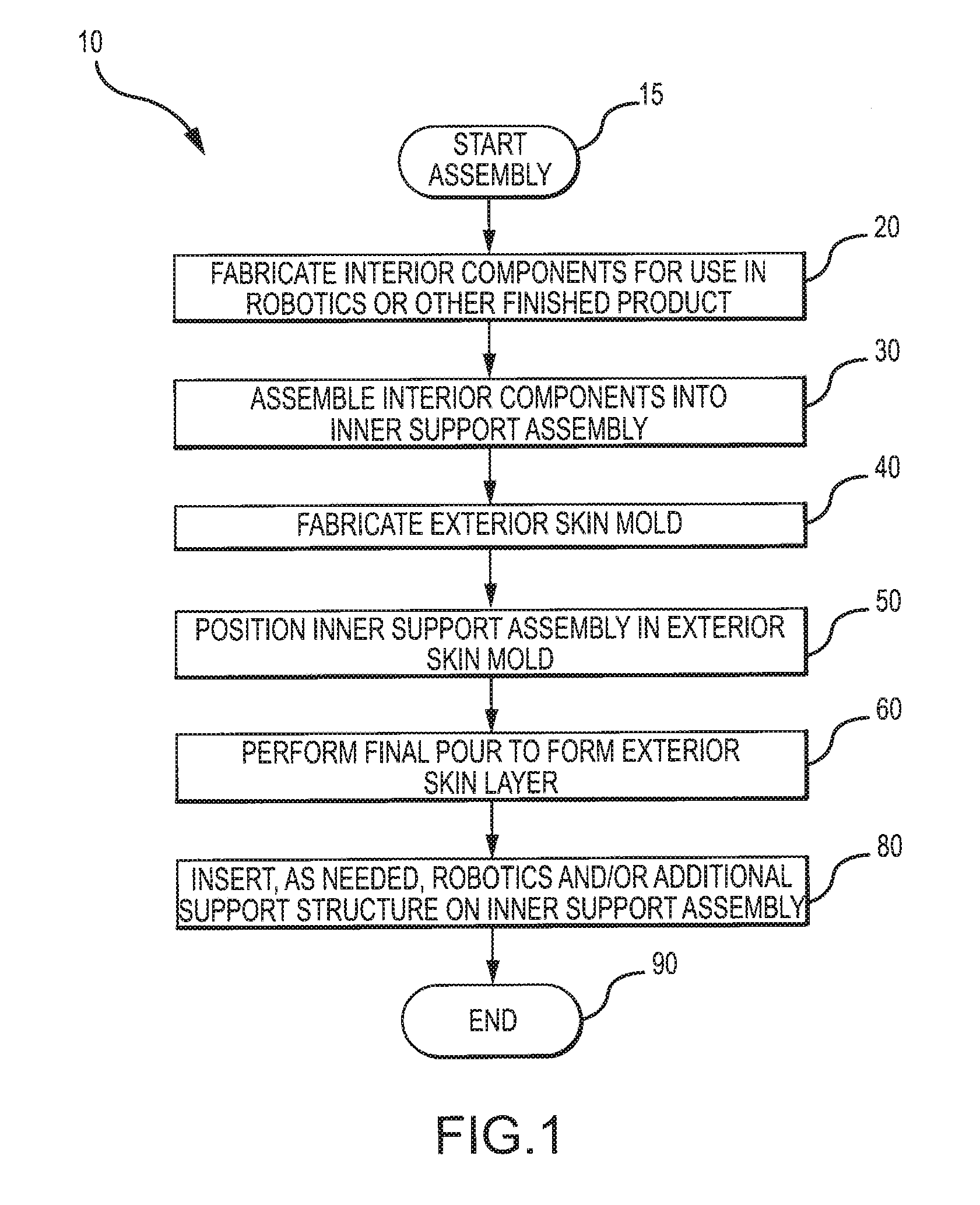
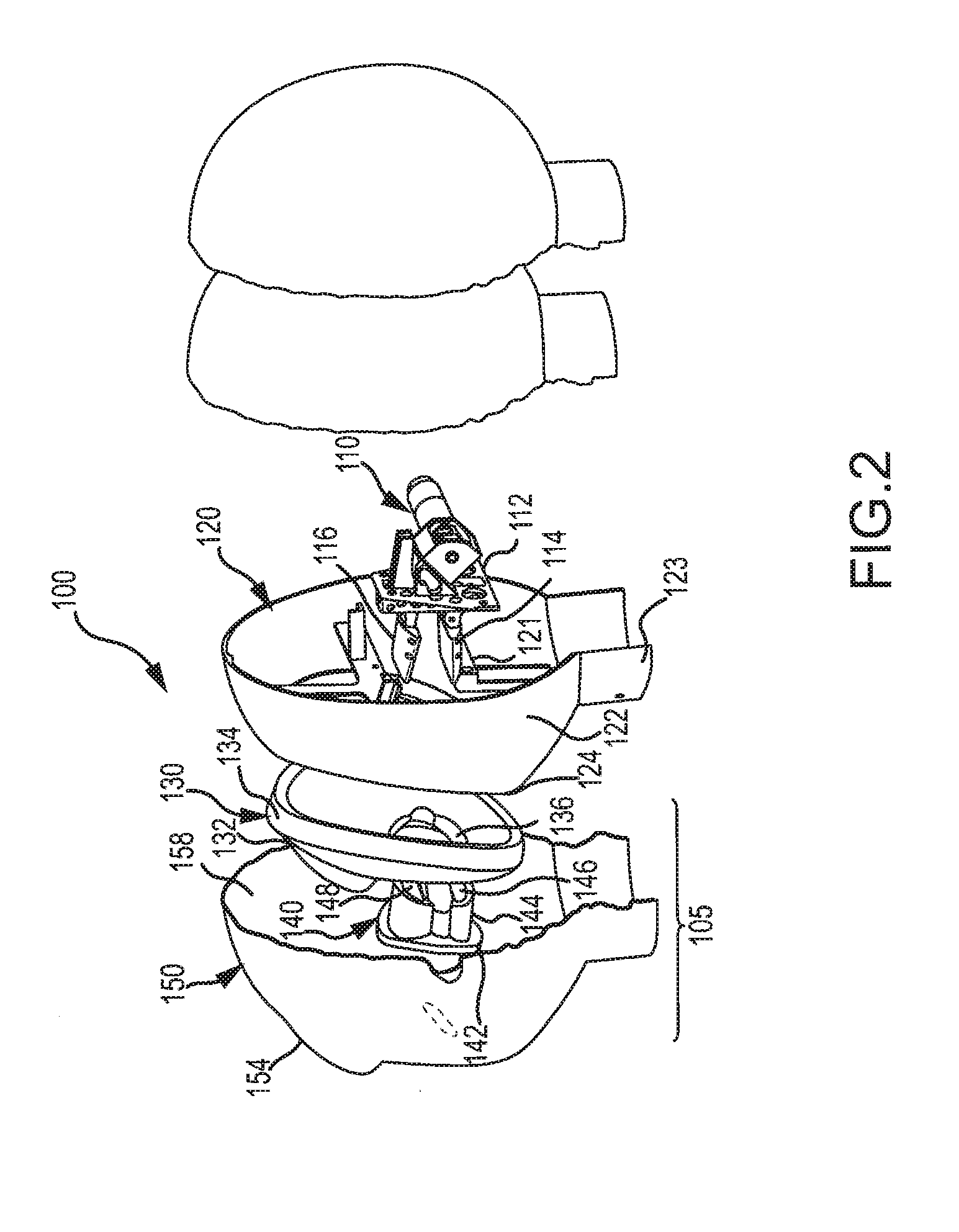
Modeling skin-covered robotics devices including artistic digital iterative design processes
PatentActiveUS20110087354A1
Innovation
- A method involving 3D modeling and rapid prototyping to create multi-layered skin systems with varying materials and hardnesses, where a flexible exterior skin layer is poured over interior components, including a force-receiving component and a soft backing component, to achieve more realistic and durable facial animation in robotics.

Fabricating lightweight skin systems for large scale robotic characters
PatentActiveUS20150091215A1
Innovation
- A method using a laser cutter to perform multiple passes with varying resolution settings to cut and texture cellular foam materials, allowing for deeper cuts and precise control of material removal, enabling the creation of skin systems with complex textures and multiple depths, and facilitating repeatable and efficient production.




Safety Standards for Human-Robot Tactile Interaction
The development of safety standards for human-robot tactile interaction represents a critical regulatory framework that must evolve alongside advancing robot skin technologies. Current international standards, including ISO 10218 and ISO/TS 15066, provide foundational guidelines for collaborative robotics but lack specific provisions for sophisticated tactile sensing systems. These existing frameworks primarily address force and speed limitations rather than the nuanced safety considerations introduced by advanced haptic feedback mechanisms.
Robot skin prototypes incorporating iterative and dynamic design models present unique safety challenges that traditional standards inadequately address. Iterative design models, with their predetermined sensor arrays and fixed response patterns, require standardized calibration protocols and fail-safe mechanisms. Dynamic design models, featuring adaptive sensing capabilities and real-time response modification, demand more sophisticated safety validation procedures that can account for unpredictable behavioral variations.
Emerging safety protocols must establish clear boundaries for tactile pressure thresholds, response time requirements, and sensor accuracy standards. The International Electrotechnical Commission has initiated preliminary discussions on IEC 62061 amendments to incorporate tactile sensing safety requirements, focusing on systematic capability levels and performance categories specific to robot skin applications.
Key safety considerations include establishing maximum allowable contact forces across different body regions, defining minimum sensor resolution requirements for human detection, and implementing redundant safety systems for critical tactile interactions. Temperature regulation standards are equally crucial, as prolonged human-robot contact through advanced skin interfaces may generate thermal risks not addressed in current robotic safety frameworks.
Certification processes for robot skin technologies require comprehensive testing protocols that evaluate both normal operational parameters and failure mode scenarios. These standards must accommodate the fundamental differences between static iterative designs and adaptive dynamic systems, ensuring that safety validation procedures remain relevant across diverse technological approaches while maintaining consistent protection levels for human operators.
Robot skin prototypes incorporating iterative and dynamic design models present unique safety challenges that traditional standards inadequately address. Iterative design models, with their predetermined sensor arrays and fixed response patterns, require standardized calibration protocols and fail-safe mechanisms. Dynamic design models, featuring adaptive sensing capabilities and real-time response modification, demand more sophisticated safety validation procedures that can account for unpredictable behavioral variations.
Emerging safety protocols must establish clear boundaries for tactile pressure thresholds, response time requirements, and sensor accuracy standards. The International Electrotechnical Commission has initiated preliminary discussions on IEC 62061 amendments to incorporate tactile sensing safety requirements, focusing on systematic capability levels and performance categories specific to robot skin applications.
Key safety considerations include establishing maximum allowable contact forces across different body regions, defining minimum sensor resolution requirements for human detection, and implementing redundant safety systems for critical tactile interactions. Temperature regulation standards are equally crucial, as prolonged human-robot contact through advanced skin interfaces may generate thermal risks not addressed in current robotic safety frameworks.
Certification processes for robot skin technologies require comprehensive testing protocols that evaluate both normal operational parameters and failure mode scenarios. These standards must accommodate the fundamental differences between static iterative designs and adaptive dynamic systems, ensuring that safety validation procedures remain relevant across diverse technological approaches while maintaining consistent protection levels for human operators.
Manufacturing Scalability of Advanced Robot Skin Systems
Manufacturing scalability represents a critical bottleneck in transitioning robot skin prototypes from laboratory demonstrations to commercial applications. Current production methods for advanced robot skin systems face significant challenges in achieving cost-effective mass production while maintaining the sophisticated sensory capabilities and mechanical properties required for practical deployment.
The fabrication of robot skin systems involves complex multi-layer architectures that integrate sensing elements, conductive pathways, and flexible substrates. Traditional manufacturing approaches rely heavily on manual assembly processes and specialized equipment, resulting in production costs that can exceed $500 per square centimeter for advanced tactile sensing arrays. This cost structure makes widespread adoption economically unfeasible for most commercial applications.
Additive manufacturing technologies, particularly 3D printing of conductive polymers and embedded electronics, show promise for scalable production. However, current additive processes struggle with the precision required for microscale sensor integration and the simultaneous deposition of multiple material types with varying electrical and mechanical properties. Resolution limitations typically restrict sensor density to fewer than 10 sensing points per square centimeter, significantly below the 100+ sensors per square centimeter achieved in research prototypes.
Roll-to-roll processing emerges as a potentially transformative manufacturing approach for robot skin systems. This continuous production method enables high-volume fabrication of flexible electronic components and has demonstrated success in producing pressure-sensitive films and basic tactile sensors. Nevertheless, integrating complex sensing modalities such as temperature, texture recognition, and multi-axis force detection within roll-to-roll processes remains technically challenging.
Quality control and standardization present additional scalability hurdles. Robot skin systems require consistent performance across thousands of individual sensing elements, with failure rates below 0.1% to ensure reliable operation. Current testing methodologies are time-intensive and often destructive, making comprehensive quality assurance impractical for high-volume production scenarios.
Supply chain considerations further complicate manufacturing scalability. Specialized materials such as liquid metal conductors, piezoelectric polymers, and biocompatible elastomers often have limited supplier bases and long lead times. Establishing reliable, high-volume supply chains for these critical components requires significant investment and long-term supplier partnerships that many manufacturers are reluctant to commit to without proven market demand.
The fabrication of robot skin systems involves complex multi-layer architectures that integrate sensing elements, conductive pathways, and flexible substrates. Traditional manufacturing approaches rely heavily on manual assembly processes and specialized equipment, resulting in production costs that can exceed $500 per square centimeter for advanced tactile sensing arrays. This cost structure makes widespread adoption economically unfeasible for most commercial applications.
Additive manufacturing technologies, particularly 3D printing of conductive polymers and embedded electronics, show promise for scalable production. However, current additive processes struggle with the precision required for microscale sensor integration and the simultaneous deposition of multiple material types with varying electrical and mechanical properties. Resolution limitations typically restrict sensor density to fewer than 10 sensing points per square centimeter, significantly below the 100+ sensors per square centimeter achieved in research prototypes.
Roll-to-roll processing emerges as a potentially transformative manufacturing approach for robot skin systems. This continuous production method enables high-volume fabrication of flexible electronic components and has demonstrated success in producing pressure-sensitive films and basic tactile sensors. Nevertheless, integrating complex sensing modalities such as temperature, texture recognition, and multi-axis force detection within roll-to-roll processes remains technically challenging.
Quality control and standardization present additional scalability hurdles. Robot skin systems require consistent performance across thousands of individual sensing elements, with failure rates below 0.1% to ensure reliable operation. Current testing methodologies are time-intensive and often destructive, making comprehensive quality assurance impractical for high-volume production scenarios.
Supply chain considerations further complicate manufacturing scalability. Specialized materials such as liquid metal conductors, piezoelectric polymers, and biocompatible elastomers often have limited supplier bases and long lead times. Establishing reliable, high-volume supply chains for these critical components requires significant investment and long-term supplier partnerships that many manufacturers are reluctant to commit to without proven market demand.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!