

Feedback Linearization in Aerodynamics: Precision Control Techniques
MAR 27, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Feedback Linearization Aerodynamics Background and Objectives
Feedback linearization in aerodynamics represents a sophisticated control methodology that addresses the inherent nonlinear characteristics of aerodynamic systems through mathematical transformation techniques. This approach emerged from the recognition that traditional linear control methods often prove inadequate when dealing with complex flight dynamics, particularly in scenarios involving high-angle-of-attack maneuvers, atmospheric disturbances, or unconventional aircraft configurations.
The historical development of feedback linearization in aerospace applications traces back to the 1980s when researchers began exploring nonlinear control theory as a solution to increasingly complex flight control challenges. Early implementations focused on fighter aircraft requiring enhanced maneuverability, where conventional control systems struggled to maintain stability across diverse flight envelopes. The technique gained momentum as computational capabilities advanced, enabling real-time implementation of the intensive mathematical calculations required for dynamic inversion.
The fundamental principle underlying feedback linearization involves transforming nonlinear aerodynamic systems into equivalent linear representations through strategic feedback control design. This transformation process, known as dynamic inversion, cancels out system nonlinearities by applying precisely calculated control inputs that counteract the natural nonlinear behavior of aerodynamic forces and moments. The resulting linearized system can then be controlled using well-established linear control techniques.
Current technological evolution in this field emphasizes the integration of advanced sensor systems, high-performance computing platforms, and sophisticated algorithms capable of handling model uncertainties and external disturbances. Modern implementations incorporate adaptive elements that can adjust to changing aerodynamic characteristics, such as those encountered during different flight phases or varying atmospheric conditions.
The primary objectives driving research and development in feedback linearization for aerodynamic applications center on achieving unprecedented precision in aircraft control across extended operational envelopes. These objectives include developing robust control architectures that maintain performance despite modeling uncertainties, creating adaptive systems capable of handling time-varying aerodynamic parameters, and establishing fault-tolerant control mechanisms that ensure safety during component failures.
Furthermore, the technology aims to enable advanced flight capabilities previously considered impractical or impossible, such as sustained post-stall flight, precise formation flying in turbulent conditions, and autonomous aerial refueling operations. The ultimate goal encompasses creating control systems that can seamlessly transition between different flight regimes while maintaining optimal performance characteristics throughout the entire mission profile.
The historical development of feedback linearization in aerospace applications traces back to the 1980s when researchers began exploring nonlinear control theory as a solution to increasingly complex flight control challenges. Early implementations focused on fighter aircraft requiring enhanced maneuverability, where conventional control systems struggled to maintain stability across diverse flight envelopes. The technique gained momentum as computational capabilities advanced, enabling real-time implementation of the intensive mathematical calculations required for dynamic inversion.
The fundamental principle underlying feedback linearization involves transforming nonlinear aerodynamic systems into equivalent linear representations through strategic feedback control design. This transformation process, known as dynamic inversion, cancels out system nonlinearities by applying precisely calculated control inputs that counteract the natural nonlinear behavior of aerodynamic forces and moments. The resulting linearized system can then be controlled using well-established linear control techniques.
Current technological evolution in this field emphasizes the integration of advanced sensor systems, high-performance computing platforms, and sophisticated algorithms capable of handling model uncertainties and external disturbances. Modern implementations incorporate adaptive elements that can adjust to changing aerodynamic characteristics, such as those encountered during different flight phases or varying atmospheric conditions.
The primary objectives driving research and development in feedback linearization for aerodynamic applications center on achieving unprecedented precision in aircraft control across extended operational envelopes. These objectives include developing robust control architectures that maintain performance despite modeling uncertainties, creating adaptive systems capable of handling time-varying aerodynamic parameters, and establishing fault-tolerant control mechanisms that ensure safety during component failures.
Furthermore, the technology aims to enable advanced flight capabilities previously considered impractical or impossible, such as sustained post-stall flight, precise formation flying in turbulent conditions, and autonomous aerial refueling operations. The ultimate goal encompasses creating control systems that can seamlessly transition between different flight regimes while maintaining optimal performance characteristics throughout the entire mission profile.
Market Demand for Precision Aerodynamic Control Systems
The aerospace industry is experiencing unprecedented demand for precision aerodynamic control systems, driven by the increasing complexity of modern aircraft designs and stringent performance requirements. Commercial aviation manufacturers are seeking advanced control technologies to enhance fuel efficiency, reduce emissions, and improve passenger comfort through superior flight stability and reduced turbulence effects.
Military and defense applications represent a significant market segment, where precision control systems are essential for next-generation fighter aircraft, unmanned aerial vehicles, and hypersonic platforms. These applications require exceptional maneuverability, stealth capabilities, and operational effectiveness in challenging environments, creating substantial demand for sophisticated feedback linearization techniques.
The emerging urban air mobility sector is generating new market opportunities for precision aerodynamic control systems. Electric vertical takeoff and landing aircraft, air taxis, and delivery drones require highly responsive control mechanisms to operate safely in congested urban environments. These platforms demand lightweight, energy-efficient control systems that can maintain stability across diverse flight conditions.
Space exploration and satellite deployment missions are driving demand for precision control technologies in launch vehicles and spacecraft. Reusable rocket systems, in particular, require exceptional control accuracy during landing phases, creating market opportunities for advanced aerodynamic control solutions that can handle complex atmospheric re-entry scenarios.
The renewable energy sector presents growing demand through wind turbine applications, where precision aerodynamic control systems optimize blade positioning and orientation to maximize energy capture while minimizing structural stress. This market segment values control systems that can respond rapidly to changing wind conditions and maintain optimal performance across varying operational parameters.
Research institutions and academic organizations constitute an important market segment, investing in precision aerodynamic control technologies for experimental aircraft, wind tunnel facilities, and computational fluid dynamics validation. These applications require highly accurate control systems capable of generating precise, repeatable test conditions for aerodynamic research and development activities.
The market demand is further amplified by regulatory requirements for enhanced safety standards, environmental compliance, and operational efficiency across all aerospace sectors, creating sustained growth opportunities for precision aerodynamic control system technologies.
Military and defense applications represent a significant market segment, where precision control systems are essential for next-generation fighter aircraft, unmanned aerial vehicles, and hypersonic platforms. These applications require exceptional maneuverability, stealth capabilities, and operational effectiveness in challenging environments, creating substantial demand for sophisticated feedback linearization techniques.
The emerging urban air mobility sector is generating new market opportunities for precision aerodynamic control systems. Electric vertical takeoff and landing aircraft, air taxis, and delivery drones require highly responsive control mechanisms to operate safely in congested urban environments. These platforms demand lightweight, energy-efficient control systems that can maintain stability across diverse flight conditions.
Space exploration and satellite deployment missions are driving demand for precision control technologies in launch vehicles and spacecraft. Reusable rocket systems, in particular, require exceptional control accuracy during landing phases, creating market opportunities for advanced aerodynamic control solutions that can handle complex atmospheric re-entry scenarios.
The renewable energy sector presents growing demand through wind turbine applications, where precision aerodynamic control systems optimize blade positioning and orientation to maximize energy capture while minimizing structural stress. This market segment values control systems that can respond rapidly to changing wind conditions and maintain optimal performance across varying operational parameters.
Research institutions and academic organizations constitute an important market segment, investing in precision aerodynamic control technologies for experimental aircraft, wind tunnel facilities, and computational fluid dynamics validation. These applications require highly accurate control systems capable of generating precise, repeatable test conditions for aerodynamic research and development activities.
The market demand is further amplified by regulatory requirements for enhanced safety standards, environmental compliance, and operational efficiency across all aerospace sectors, creating sustained growth opportunities for precision aerodynamic control system technologies.
Current State and Challenges in Nonlinear Flight Control
Nonlinear flight control systems have evolved significantly over the past three decades, with feedback linearization emerging as a prominent technique for managing complex aerodynamic behaviors. Current implementations demonstrate varying degrees of success across different aircraft configurations, from conventional fixed-wing platforms to advanced unmanned aerial vehicles and rotorcraft systems.
The state-of-the-art in feedback linearization applications reveals substantial progress in theoretical frameworks, particularly in exact linearization methods for fully actuated systems. Modern control architectures successfully address nominal flight conditions through input-output linearization and dynamic inversion techniques. Advanced implementations incorporate adaptive elements to handle parametric uncertainties and demonstrate robust performance in structured flight envelopes.
However, significant technical challenges persist in practical deployments. Model accuracy remains a critical limitation, as feedback linearization heavily depends on precise mathematical representations of aerodynamic forces and moments. Uncertainties in aerodynamic coefficients, particularly during high angle-of-attack maneuvers or in turbulent conditions, can severely degrade control performance and potentially compromise system stability.
Computational complexity presents another substantial barrier to widespread adoption. Real-time implementation of feedback linearization algorithms requires intensive matrix computations and continuous model inversions, demanding high-performance flight control computers. This computational burden becomes particularly pronounced in multi-input, multi-output systems where coupling effects necessitate complex transformation matrices.
Robustness concerns constitute perhaps the most significant challenge facing current nonlinear flight control implementations. External disturbances, such as atmospheric turbulence, wind shear, and sensor noise, can disrupt the linearization process and introduce unwanted dynamics. Additionally, actuator limitations, including saturation, rate limits, and failures, are not inherently addressed by standard feedback linearization approaches.
Geographic distribution of advanced nonlinear flight control research shows concentration in North America and Europe, with emerging capabilities in Asia-Pacific regions. Leading aerospace manufacturers and research institutions continue to address fundamental limitations through hybrid control strategies, combining feedback linearization with robust control techniques and machine learning approaches to enhance adaptability and fault tolerance in operational environments.
The state-of-the-art in feedback linearization applications reveals substantial progress in theoretical frameworks, particularly in exact linearization methods for fully actuated systems. Modern control architectures successfully address nominal flight conditions through input-output linearization and dynamic inversion techniques. Advanced implementations incorporate adaptive elements to handle parametric uncertainties and demonstrate robust performance in structured flight envelopes.
However, significant technical challenges persist in practical deployments. Model accuracy remains a critical limitation, as feedback linearization heavily depends on precise mathematical representations of aerodynamic forces and moments. Uncertainties in aerodynamic coefficients, particularly during high angle-of-attack maneuvers or in turbulent conditions, can severely degrade control performance and potentially compromise system stability.
Computational complexity presents another substantial barrier to widespread adoption. Real-time implementation of feedback linearization algorithms requires intensive matrix computations and continuous model inversions, demanding high-performance flight control computers. This computational burden becomes particularly pronounced in multi-input, multi-output systems where coupling effects necessitate complex transformation matrices.
Robustness concerns constitute perhaps the most significant challenge facing current nonlinear flight control implementations. External disturbances, such as atmospheric turbulence, wind shear, and sensor noise, can disrupt the linearization process and introduce unwanted dynamics. Additionally, actuator limitations, including saturation, rate limits, and failures, are not inherently addressed by standard feedback linearization approaches.
Geographic distribution of advanced nonlinear flight control research shows concentration in North America and Europe, with emerging capabilities in Asia-Pacific regions. Leading aerospace manufacturers and research institutions continue to address fundamental limitations through hybrid control strategies, combining feedback linearization with robust control techniques and machine learning approaches to enhance adaptability and fault tolerance in operational environments.
Existing Feedback Linearization Solutions in Aerospace
01 Feedback linearization control for motor systems
Feedback linearization techniques are applied to motor control systems to achieve precise speed and position control. The method transforms nonlinear motor dynamics into linear systems through coordinate transformation and state feedback, enabling accurate tracking performance. This approach compensates for system nonlinearities and disturbances, improving control precision in various motor applications including servo motors and electric drives.- Feedback linearization control for motor systems: Feedback linearization techniques are applied to motor control systems to achieve precise speed and position control. The method transforms nonlinear motor dynamics into linear systems through coordinate transformation and state feedback, enabling accurate tracking performance. This approach compensates for nonlinearities in motor characteristics and external disturbances, improving control precision in applications such as servo motors and electric drives.
- Feedback linearization for robotic manipulator control: This technique implements feedback linearization methods for robotic arm and manipulator systems to achieve high-precision trajectory tracking. The control strategy addresses the nonlinear dynamics and coupling effects between joints, transforming the complex nonlinear system into a controllable linear form. The approach enhances positioning accuracy and dynamic response in industrial robots and automated manufacturing systems.
- Adaptive feedback linearization control: Adaptive control strategies are combined with feedback linearization to handle system uncertainties and parameter variations. The method adjusts control parameters in real-time based on system identification and estimation algorithms, maintaining control precision despite changing operating conditions. This approach is particularly effective for systems with unknown or time-varying parameters, ensuring robust performance across different scenarios.
- Feedback linearization for power electronics and converters: Feedback linearization control is applied to power electronic converters and inverters to achieve precise voltage and current regulation. The technique linearizes the nonlinear switching characteristics and dynamic behavior of power conversion systems, enabling accurate output control and fast transient response. This method improves power quality and stability in applications such as renewable energy systems and motor drives.
- Neural network-based feedback linearization: Neural networks are integrated with feedback linearization control to approximate complex nonlinear system dynamics and enhance control precision. The approach uses learning algorithms to identify system models and generate appropriate control signals, handling uncertainties and unmodeled dynamics effectively. This intelligent control method improves adaptability and performance in complex systems where analytical models are difficult to obtain.
02 Feedback linearization for robotic manipulator control
This technique implements feedback linearization methods for robotic arm and manipulator systems to achieve high-precision trajectory tracking. The control strategy cancels nonlinear dynamics through computed torque methods and feedback compensation, resulting in improved positioning accuracy and dynamic response. The approach handles complex multi-joint coupling effects and enables precise end-effector control.Expand Specific Solutions03 Adaptive feedback linearization control
Adaptive control strategies are combined with feedback linearization to handle system uncertainties and parameter variations. The method adjusts control parameters in real-time based on system identification and estimation algorithms, maintaining control precision despite changing operating conditions. This approach is particularly effective for systems with unknown or time-varying parameters.Expand Specific Solutions04 Feedback linearization for power electronics and converters
Feedback linearization control is applied to power electronic converters and inverters to achieve precise voltage and current regulation. The technique linearizes the nonlinear switching dynamics of power converters, enabling accurate output control and fast dynamic response. This method improves power quality and stability in various power conversion applications.Expand Specific Solutions05 Neural network-based feedback linearization
Neural networks are integrated with feedback linearization control to approximate complex nonlinear system dynamics and enhance control precision. The approach uses learning algorithms to identify system models and generate appropriate control signals, providing robust performance for highly nonlinear and uncertain systems. This combination improves adaptability and control accuracy in challenging applications.Expand Specific Solutions
Key Players in Advanced Flight Control Systems Industry
The feedback linearization in aerodynamics field represents a mature technological domain currently in the advanced development stage, with significant market potential driven by increasing demands for precision flight control systems. The market encompasses aerospace manufacturers, defense contractors, and research institutions, with estimated growth reflecting expanding UAV and commercial aviation sectors. Technology maturity varies significantly across key players: leading aerospace companies like Bombardier, Honda Motor, and Aurora Flight Sciences demonstrate high implementation readiness, while automotive manufacturers such as Nissan and Hyundai are adapting these control techniques for emerging mobility applications. Academic institutions including MIT, Northwestern Polytechnical University, Beihang University, and Technical University of Berlin contribute fundamental research advancing theoretical frameworks. Chinese entities like China Academy of Launch Vehicle Technology and Commercial Aircraft Corporation represent rapidly developing capabilities in this space, indicating strong competitive dynamics between established Western aerospace leaders and emerging Asian manufacturers in precision aerodynamic control technologies.
GM Global Technology Operations LLC
Technical Solution: While primarily automotive-focused, GM has applied feedback linearization principles to aerodynamic control systems in their advanced vehicle development programs. Their research includes active aerodynamic control systems that use feedback linearization to optimize vehicle stability and fuel efficiency through real-time adjustment of aerodynamic surfaces. The company has integrated these techniques with their autonomous driving systems to enhance vehicle performance in various driving conditions.
Strengths: Strong industrial implementation capabilities with extensive resources and manufacturing expertise. Weaknesses: Primary focus on automotive applications rather than traditional aeronautical systems, limiting specialized aerospace knowledge.
Beihang University
Technical Solution: Beihang University specializes in feedback linearization control for unmanned aerial vehicles and spacecraft systems. Their approach combines geometric control theory with feedback linearization to achieve precise attitude and trajectory control in complex aerodynamic environments. The university has developed robust nonlinear control algorithms that compensate for aerodynamic uncertainties and provide stable flight performance under varying atmospheric conditions.
Strengths: Strong aerospace engineering background with practical UAV and spacecraft applications. Weaknesses: Research primarily focused on academic applications rather than large-scale commercial systems.
Core Innovations in Nonlinear Control Theory Applications
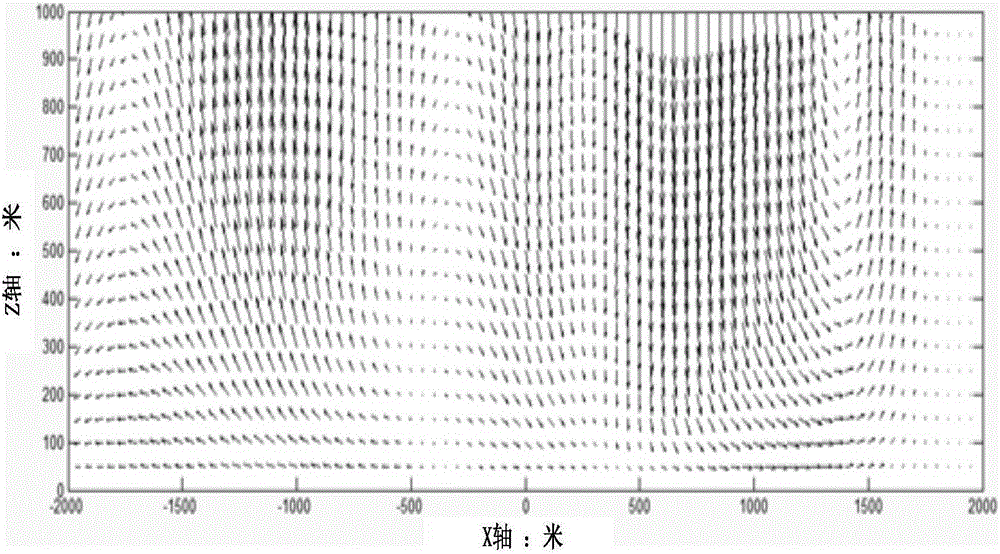
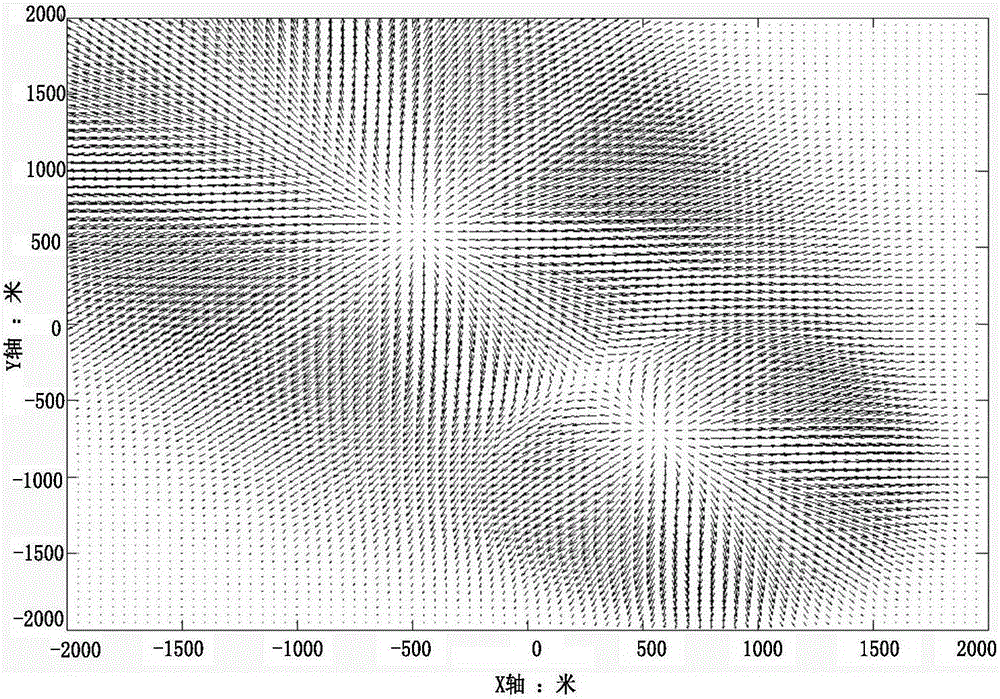
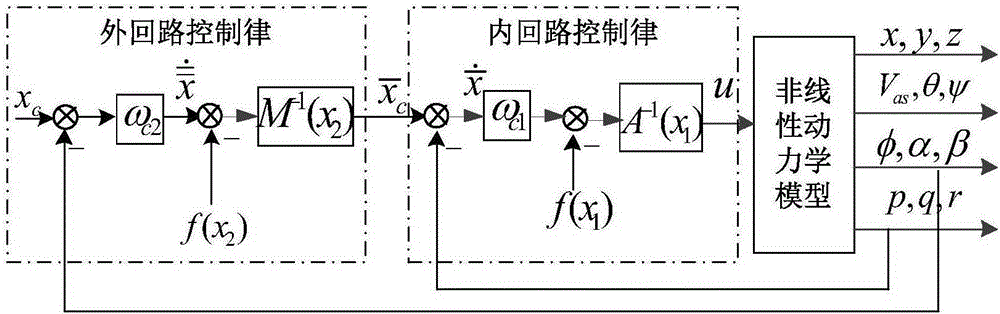
Airplane attitude control method under influence of wind field
PatentActiveCN105182989A
Innovation
- The nonlinear dynamic inverse method and feedback linearization technology are used to establish a three-dimensional wind field model based on the vortex ring principle. The control laws are designed separately into fast loops and slow loops. The precise control of the aircraft attitude is achieved through the dynamic inverse method and fuzzy network control.

Aircraft control systems and methods using sliding mode control and feedback linearization
PatentActiveUS20210341946A1
Innovation
- The method employs a combination of sliding mode control and feedback linearization techniques to compute target rates of change for bank angles, heading angles, and altitudes, using thresholds and sigmoid functions to adjust control inputs based on error values, allowing for precise control of actuators during flight.




Aviation Safety Regulations for Advanced Control Systems
Aviation safety regulations for advanced control systems represent a critical framework governing the implementation of sophisticated flight control technologies, including feedback linearization techniques in aerodynamic applications. The regulatory landscape has evolved significantly to address the complexities introduced by modern control algorithms that fundamentally alter aircraft behavior through mathematical transformation of nonlinear dynamics.
The Federal Aviation Administration (FAA) and European Union Aviation Safety Agency (EASA) have established comprehensive certification standards specifically addressing advanced control systems under regulations such as FAR Part 25 and CS-25. These regulations mandate rigorous verification and validation processes for any control system that employs nonlinear control techniques, requiring extensive flight testing, simulation validation, and mathematical proof of system stability across all operational envelopes.
Certification requirements for feedback linearization systems demand demonstration of fail-safe operation modes when the linearization algorithms encounter singularities or computational failures. Regulatory bodies require implementation of monitoring systems that can detect when the feedback linearization controller approaches mathematical singularities, automatically reverting to conventional control modes to maintain aircraft safety.
The DO-178C software development standard has been extended to address the unique challenges posed by advanced mathematical control algorithms. This includes requirements for formal verification methods, model-based development processes, and extensive coverage analysis of the control law software. The standard emphasizes the need for traceability between high-level control objectives and low-level software implementation.
International harmonization efforts through the International Civil Aviation Organization (ICAO) have established global standards for advanced control system certification. These standards address cross-border recognition of certification credentials and ensure consistent safety levels worldwide. The regulations also mandate comprehensive pilot training programs to ensure proper understanding of advanced control system behavior and appropriate responses to system anomalies.
Emerging regulatory frameworks are being developed to address artificial intelligence integration within feedback linearization systems, establishing guidelines for adaptive control algorithms and machine learning components that may modify control behavior during flight operations.
The Federal Aviation Administration (FAA) and European Union Aviation Safety Agency (EASA) have established comprehensive certification standards specifically addressing advanced control systems under regulations such as FAR Part 25 and CS-25. These regulations mandate rigorous verification and validation processes for any control system that employs nonlinear control techniques, requiring extensive flight testing, simulation validation, and mathematical proof of system stability across all operational envelopes.
Certification requirements for feedback linearization systems demand demonstration of fail-safe operation modes when the linearization algorithms encounter singularities or computational failures. Regulatory bodies require implementation of monitoring systems that can detect when the feedback linearization controller approaches mathematical singularities, automatically reverting to conventional control modes to maintain aircraft safety.
The DO-178C software development standard has been extended to address the unique challenges posed by advanced mathematical control algorithms. This includes requirements for formal verification methods, model-based development processes, and extensive coverage analysis of the control law software. The standard emphasizes the need for traceability between high-level control objectives and low-level software implementation.
International harmonization efforts through the International Civil Aviation Organization (ICAO) have established global standards for advanced control system certification. These standards address cross-border recognition of certification credentials and ensure consistent safety levels worldwide. The regulations also mandate comprehensive pilot training programs to ensure proper understanding of advanced control system behavior and appropriate responses to system anomalies.
Emerging regulatory frameworks are being developed to address artificial intelligence integration within feedback linearization systems, establishing guidelines for adaptive control algorithms and machine learning components that may modify control behavior during flight operations.
Computational Requirements for Real-time Implementation
Real-time implementation of feedback linearization in aerodynamic control systems demands substantial computational resources due to the complex mathematical operations required for dynamic inversion and state transformation. The computational burden primarily stems from the need to continuously calculate the inverse dynamics of nonlinear aerodynamic models, which involves matrix inversions, Jacobian computations, and high-order derivative calculations at sampling rates typically ranging from 100Hz to 1kHz for aircraft control applications.
Modern flight control systems require processing capabilities that can handle floating-point operations exceeding 10^6 FLOPS for basic feedback linearization algorithms. Advanced implementations incorporating adaptive elements or robust control features may demand computational power in the range of 10^7 to 10^8 FLOPS. These requirements necessitate specialized hardware architectures, with multi-core processors or dedicated digital signal processors becoming standard in contemporary avionics systems.
Memory requirements present another critical constraint, as real-time feedback linearization algorithms must store aerodynamic coefficient lookup tables, state history buffers, and intermediate calculation results. Typical implementations require 50-200 MB of high-speed memory, with additional storage needed for fault-tolerant redundancy systems. The memory access patterns must be optimized to minimize latency, as delays exceeding 1-2 milliseconds can significantly degrade control performance.
Latency constraints impose the most stringent requirements on computational architecture. The total computational delay from sensor input to actuator command must remain below 10-20 milliseconds for most aircraft applications, with fighter aircraft requiring sub-5 millisecond response times. This necessitates careful algorithm optimization, including pre-computed lookup tables, approximation techniques, and parallel processing strategies to distribute computational load across multiple processing units.
Power consumption considerations become particularly critical for unmanned aerial vehicles and space applications, where computational efficiency directly impacts mission duration and payload capacity. Modern implementations typically consume 20-100 watts for complete feedback linearization systems, driving the adoption of energy-efficient processors and adaptive computational strategies that scale processing intensity based on flight conditions and required control precision levels.
Modern flight control systems require processing capabilities that can handle floating-point operations exceeding 10^6 FLOPS for basic feedback linearization algorithms. Advanced implementations incorporating adaptive elements or robust control features may demand computational power in the range of 10^7 to 10^8 FLOPS. These requirements necessitate specialized hardware architectures, with multi-core processors or dedicated digital signal processors becoming standard in contemporary avionics systems.
Memory requirements present another critical constraint, as real-time feedback linearization algorithms must store aerodynamic coefficient lookup tables, state history buffers, and intermediate calculation results. Typical implementations require 50-200 MB of high-speed memory, with additional storage needed for fault-tolerant redundancy systems. The memory access patterns must be optimized to minimize latency, as delays exceeding 1-2 milliseconds can significantly degrade control performance.
Latency constraints impose the most stringent requirements on computational architecture. The total computational delay from sensor input to actuator command must remain below 10-20 milliseconds for most aircraft applications, with fighter aircraft requiring sub-5 millisecond response times. This necessitates careful algorithm optimization, including pre-computed lookup tables, approximation techniques, and parallel processing strategies to distribute computational load across multiple processing units.
Power consumption considerations become particularly critical for unmanned aerial vehicles and space applications, where computational efficiency directly impacts mission duration and payload capacity. Modern implementations typically consume 20-100 watts for complete feedback linearization systems, driving the adoption of energy-efficient processors and adaptive computational strategies that scale processing intensity based on flight conditions and required control precision levels.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!