

Feedback Linearization vs Feedforward Control: Real-Time Adjustments
MAR 27, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Feedback Linearization vs Feedforward Control Background and Objectives
Control theory has evolved significantly since the early 20th century, with feedback and feedforward control strategies emerging as fundamental approaches to system regulation. Feedback linearization represents an advanced nonlinear control technique that transforms complex nonlinear systems into linear ones through mathematical coordinate transformations and state feedback. This approach enables the application of well-established linear control methods to inherently nonlinear systems, providing precise control over dynamic behaviors.
Feedforward control, conversely, operates on predictive principles by anticipating disturbances and system inputs before they affect the controlled variable. This proactive approach contrasts with traditional feedback mechanisms that react to errors after they occur. The integration of feedforward elements with feedback systems has demonstrated substantial improvements in control performance, particularly in applications requiring rapid response times and minimal steady-state errors.
The convergence of these methodologies has gained prominence in modern control applications where real-time performance is critical. Industries such as aerospace, automotive, robotics, and process control increasingly demand control systems capable of handling complex nonlinear dynamics while maintaining rapid response characteristics. The challenge lies in optimally combining feedback linearization techniques with feedforward compensation to achieve superior real-time performance.
Current technological trends indicate a growing emphasis on adaptive and intelligent control systems that can dynamically adjust their parameters based on operating conditions. The evolution toward Industry 4.0 and autonomous systems has intensified the need for control strategies that can handle uncertainty, nonlinearity, and time-varying parameters simultaneously. This technological landscape presents unique opportunities for hybrid control approaches that leverage the strengths of both feedback linearization and feedforward control.
The primary objective of investigating feedback linearization versus feedforward control in real-time adjustment contexts is to establish optimal integration strategies that maximize system performance while maintaining computational efficiency. This involves developing methodologies that can seamlessly transition between control modes based on system requirements, disturbance characteristics, and performance criteria. The goal extends to creating adaptive frameworks that can automatically tune control parameters in real-time, ensuring robust performance across varying operational conditions.
Furthermore, the research aims to address the computational challenges associated with implementing sophisticated control algorithms in real-time environments. This includes developing efficient algorithms that can execute complex mathematical transformations required for feedback linearization while simultaneously processing feedforward compensation signals within stringent timing constraints.
Feedforward control, conversely, operates on predictive principles by anticipating disturbances and system inputs before they affect the controlled variable. This proactive approach contrasts with traditional feedback mechanisms that react to errors after they occur. The integration of feedforward elements with feedback systems has demonstrated substantial improvements in control performance, particularly in applications requiring rapid response times and minimal steady-state errors.
The convergence of these methodologies has gained prominence in modern control applications where real-time performance is critical. Industries such as aerospace, automotive, robotics, and process control increasingly demand control systems capable of handling complex nonlinear dynamics while maintaining rapid response characteristics. The challenge lies in optimally combining feedback linearization techniques with feedforward compensation to achieve superior real-time performance.
Current technological trends indicate a growing emphasis on adaptive and intelligent control systems that can dynamically adjust their parameters based on operating conditions. The evolution toward Industry 4.0 and autonomous systems has intensified the need for control strategies that can handle uncertainty, nonlinearity, and time-varying parameters simultaneously. This technological landscape presents unique opportunities for hybrid control approaches that leverage the strengths of both feedback linearization and feedforward control.
The primary objective of investigating feedback linearization versus feedforward control in real-time adjustment contexts is to establish optimal integration strategies that maximize system performance while maintaining computational efficiency. This involves developing methodologies that can seamlessly transition between control modes based on system requirements, disturbance characteristics, and performance criteria. The goal extends to creating adaptive frameworks that can automatically tune control parameters in real-time, ensuring robust performance across varying operational conditions.
Furthermore, the research aims to address the computational challenges associated with implementing sophisticated control algorithms in real-time environments. This includes developing efficient algorithms that can execute complex mathematical transformations required for feedback linearization while simultaneously processing feedforward compensation signals within stringent timing constraints.
Market Demand for Advanced Real-Time Control Systems
The global market for advanced real-time control systems is experiencing unprecedented growth driven by the increasing complexity of modern industrial processes and the demand for higher precision in automation applications. Industries ranging from aerospace and automotive to manufacturing and energy are seeking sophisticated control solutions that can deliver instantaneous responses to dynamic system changes while maintaining optimal performance parameters.
Manufacturing sectors represent the largest demand segment for advanced real-time control technologies, particularly in applications requiring precise motion control, process optimization, and quality assurance. The automotive industry's transition toward electric vehicles and autonomous driving systems has created substantial demand for control systems capable of managing complex nonlinear dynamics in real-time environments. Similarly, aerospace applications require control solutions that can handle rapidly changing flight conditions and maintain stability under extreme operational scenarios.
The energy sector, including renewable energy systems and smart grid infrastructure, presents significant market opportunities for advanced control technologies. Wind turbine control systems, solar tracking mechanisms, and grid stabilization applications all require sophisticated real-time control capabilities to maximize efficiency and ensure reliable operation. These applications often involve nonlinear system dynamics that benefit from advanced control methodologies combining both feedback linearization and feedforward control strategies.
Industrial robotics and automation represent another high-growth market segment driving demand for real-time control systems. Modern robotic applications in manufacturing, logistics, and service industries require control systems capable of adapting to varying loads, environmental conditions, and operational requirements while maintaining precise positioning and trajectory tracking capabilities.
The emergence of Industry 4.0 and smart manufacturing concepts has further accelerated market demand for intelligent control systems that can integrate with broader digital ecosystems. These systems must provide real-time performance while supporting connectivity, data analytics, and predictive maintenance capabilities. The integration of artificial intelligence and machine learning technologies with traditional control systems is creating new market opportunities for hybrid solutions that combine classical control theory with modern computational approaches.
Market growth is also fueled by increasing regulatory requirements for safety, efficiency, and environmental compliance across various industries. These regulations drive the need for more sophisticated control systems capable of maintaining optimal performance while ensuring adherence to strict operational standards and safety protocols.
Manufacturing sectors represent the largest demand segment for advanced real-time control technologies, particularly in applications requiring precise motion control, process optimization, and quality assurance. The automotive industry's transition toward electric vehicles and autonomous driving systems has created substantial demand for control systems capable of managing complex nonlinear dynamics in real-time environments. Similarly, aerospace applications require control solutions that can handle rapidly changing flight conditions and maintain stability under extreme operational scenarios.
The energy sector, including renewable energy systems and smart grid infrastructure, presents significant market opportunities for advanced control technologies. Wind turbine control systems, solar tracking mechanisms, and grid stabilization applications all require sophisticated real-time control capabilities to maximize efficiency and ensure reliable operation. These applications often involve nonlinear system dynamics that benefit from advanced control methodologies combining both feedback linearization and feedforward control strategies.
Industrial robotics and automation represent another high-growth market segment driving demand for real-time control systems. Modern robotic applications in manufacturing, logistics, and service industries require control systems capable of adapting to varying loads, environmental conditions, and operational requirements while maintaining precise positioning and trajectory tracking capabilities.
The emergence of Industry 4.0 and smart manufacturing concepts has further accelerated market demand for intelligent control systems that can integrate with broader digital ecosystems. These systems must provide real-time performance while supporting connectivity, data analytics, and predictive maintenance capabilities. The integration of artificial intelligence and machine learning technologies with traditional control systems is creating new market opportunities for hybrid solutions that combine classical control theory with modern computational approaches.
Market growth is also fueled by increasing regulatory requirements for safety, efficiency, and environmental compliance across various industries. These regulations drive the need for more sophisticated control systems capable of maintaining optimal performance while ensuring adherence to strict operational standards and safety protocols.
Current State and Challenges in Nonlinear Control Methods
Nonlinear control systems present fundamental challenges that distinguish them from their linear counterparts, particularly in the context of feedback linearization and feedforward control strategies. The inherent complexity of nonlinear dynamics creates computational burdens that significantly impact real-time implementation capabilities. Current control architectures struggle with the mathematical intensity required for exact feedback linearization, which demands precise knowledge of system dynamics and often involves complex coordinate transformations.
The state-of-the-art in feedback linearization faces critical limitations in model accuracy and computational efficiency. Exact linearization requires complete knowledge of nonlinear system dynamics, which is rarely achievable in practical applications. Model uncertainties, parameter variations, and unmodeled dynamics introduce significant performance degradation. Additionally, the singularity problem in feedback linearization remains a persistent challenge, where control inputs may become undefined or infinite at certain operating points.
Feedforward control methods, while computationally less intensive, encounter their own set of obstacles. The primary challenge lies in accurate disturbance prediction and system modeling. Current feedforward implementations often rely on simplified models that fail to capture the full complexity of nonlinear behaviors. The integration of feedforward and feedback components presents synchronization challenges, particularly when dealing with time-varying systems or rapidly changing operating conditions.
Real-time implementation constraints represent a major bottleneck across both control paradigms. Modern embedded control systems face limitations in processing power, memory allocation, and sampling rates. The computational overhead of nonlinear control algorithms often exceeds the capabilities of standard industrial controllers, forcing engineers to implement simplified or approximate solutions that compromise performance.
Robustness issues plague current nonlinear control implementations. Sensitivity to modeling errors, parameter uncertainties, and external disturbances remains inadequately addressed. The trade-off between control performance and robustness continues to challenge practitioners, particularly in safety-critical applications where system reliability is paramount.
Adaptive and learning-based approaches show promise but introduce new complexities. Machine learning integration with traditional control methods faces challenges in stability guarantees, interpretability, and real-time learning capabilities. The convergence properties of adaptive algorithms in nonlinear settings remain theoretically and practically challenging.
Current industrial adoption is limited by the gap between theoretical advances and practical implementation. The complexity of tuning nonlinear controllers, combined with the lack of standardized design methodologies, creates barriers to widespread industrial acceptance. This situation necessitates continued research into simplified yet effective nonlinear control strategies that can bridge the gap between academic developments and industrial requirements.
The state-of-the-art in feedback linearization faces critical limitations in model accuracy and computational efficiency. Exact linearization requires complete knowledge of nonlinear system dynamics, which is rarely achievable in practical applications. Model uncertainties, parameter variations, and unmodeled dynamics introduce significant performance degradation. Additionally, the singularity problem in feedback linearization remains a persistent challenge, where control inputs may become undefined or infinite at certain operating points.
Feedforward control methods, while computationally less intensive, encounter their own set of obstacles. The primary challenge lies in accurate disturbance prediction and system modeling. Current feedforward implementations often rely on simplified models that fail to capture the full complexity of nonlinear behaviors. The integration of feedforward and feedback components presents synchronization challenges, particularly when dealing with time-varying systems or rapidly changing operating conditions.
Real-time implementation constraints represent a major bottleneck across both control paradigms. Modern embedded control systems face limitations in processing power, memory allocation, and sampling rates. The computational overhead of nonlinear control algorithms often exceeds the capabilities of standard industrial controllers, forcing engineers to implement simplified or approximate solutions that compromise performance.
Robustness issues plague current nonlinear control implementations. Sensitivity to modeling errors, parameter uncertainties, and external disturbances remains inadequately addressed. The trade-off between control performance and robustness continues to challenge practitioners, particularly in safety-critical applications where system reliability is paramount.
Adaptive and learning-based approaches show promise but introduce new complexities. Machine learning integration with traditional control methods faces challenges in stability guarantees, interpretability, and real-time learning capabilities. The convergence properties of adaptive algorithms in nonlinear settings remain theoretically and practically challenging.
Current industrial adoption is limited by the gap between theoretical advances and practical implementation. The complexity of tuning nonlinear controllers, combined with the lack of standardized design methodologies, creates barriers to widespread industrial acceptance. This situation necessitates continued research into simplified yet effective nonlinear control strategies that can bridge the gap between academic developments and industrial requirements.
Existing Real-Time Control Implementation Solutions
01 Feedback linearization control methods for nonlinear systems
Feedback linearization techniques are employed to transform nonlinear system dynamics into linear ones through state feedback and coordinate transformations. This approach enables the application of linear control theory to inherently nonlinear systems, improving control accuracy and system stability. The method involves calculating appropriate feedback control laws that cancel nonlinearities in the system model, allowing for precise trajectory tracking and disturbance rejection in real-time applications.- Feedback linearization control methods for nonlinear systems: Feedback linearization techniques are employed to transform nonlinear system dynamics into linear ones through state feedback and coordinate transformations. This approach enables the application of linear control theory to inherently nonlinear systems, improving control accuracy and system stability. The method involves calculating appropriate feedback control laws that cancel nonlinearities in the system model, allowing for precise trajectory tracking and disturbance rejection in real-time applications.
- Feedforward control with model-based compensation: Feedforward control strategies utilize system models to predict and compensate for known disturbances and reference changes before they affect system performance. By computing control actions based on anticipated system behavior, feedforward controllers can significantly reduce tracking errors and improve response time. This technique is particularly effective when combined with feedback control, creating a two-degree-of-freedom control structure that handles both reference tracking and disturbance rejection efficiently.
- Real-time adaptive parameter adjustment mechanisms: Adaptive control systems continuously monitor system performance and adjust controller parameters in real-time to maintain optimal operation under varying conditions. These mechanisms employ online identification algorithms and parameter estimation techniques to update control gains and compensation terms dynamically. The adaptive approach ensures robust performance across different operating points and compensates for system uncertainties, aging effects, and environmental changes without requiring manual retuning.
- Combined feedback-feedforward control architectures: Integrated control structures that combine feedback linearization with feedforward compensation provide superior performance by leveraging the strengths of both approaches. The feedforward path handles predictable dynamics and reference tracking, while the feedback path corrects for modeling errors, uncertainties, and unmeasured disturbances. This hybrid architecture enables precise control with fast response times and minimal steady-state errors, making it suitable for high-performance applications requiring real-time adjustments.
- Digital implementation and computational optimization for real-time control: Real-time implementation of feedback linearization and feedforward control requires efficient computational algorithms and optimized digital signal processing techniques. Methods include discretization schemes that preserve continuous-time control properties, fast numerical solvers for nonlinear equations, and parallel processing architectures. These implementations ensure that complex control calculations can be completed within sampling intervals, enabling high-frequency control updates necessary for dynamic systems with fast time constants.
02 Feedforward control with model-based compensation
Feedforward control strategies utilize system models to predict and compensate for known disturbances and reference changes before they affect system performance. By computing control inputs based on anticipated system behavior, feedforward controllers can significantly reduce tracking errors and improve response time. This technique is particularly effective when combined with feedback control, creating a two-degree-of-freedom control structure that handles both reference tracking and disturbance rejection efficiently.Expand Specific Solutions03 Real-time adaptive parameter adjustment mechanisms
Adaptive control systems continuously monitor system performance and adjust controller parameters in real-time to maintain optimal operation under varying conditions. These mechanisms employ online identification algorithms and parameter estimation techniques to update control gains and compensation terms dynamically. The adaptive approach ensures robust performance across different operating points and compensates for system uncertainties, aging effects, and environmental changes without requiring manual retuning.Expand Specific Solutions04 Combined feedback-feedforward control architectures
Integrated control structures that combine feedback linearization with feedforward compensation provide superior performance by leveraging the strengths of both approaches. The feedforward path handles predictable dynamics and reference tracking, while the feedback path corrects for modeling errors, uncertainties, and unmeasured disturbances. This hybrid architecture enables precise control with fast response times and minimal steady-state errors, making it suitable for high-performance applications requiring real-time adjustments.Expand Specific Solutions05 Digital implementation and real-time computation optimization
Practical implementation of feedback linearization and feedforward control requires efficient computational algorithms suitable for real-time execution on digital controllers. Optimization techniques include simplified model representations, lookup tables for nonlinear functions, and parallel processing architectures. These methods reduce computational burden while maintaining control performance, enabling high-frequency control updates necessary for fast dynamic systems and ensuring deterministic timing in embedded control applications.Expand Specific Solutions
Key Players in Advanced Control Systems Industry
The feedback linearization versus feedforward control technology landscape represents a mature field within advanced control systems, currently experiencing significant growth driven by real-time industrial automation demands. The market spans multiple sectors including telecommunications, automotive, and semiconductor manufacturing, with established players like Honda Motor Co., Intel Corp., and Qualcomm Inc. leading automotive and processor applications, while CommScope Technologies LLC, ZTE Corp., and Ericsson dominate telecommunications implementations. Technology maturity varies significantly across applications, with companies like OMRON Corp., Hitachi Industrial Equipment Systems, and Agilent Technologies demonstrating advanced industrial automation solutions, while emerging applications in semiconductor processing through KLA Corp. and ASML Netherlands BV represent cutting-edge developments. The competitive landscape shows strong academic-industry collaboration, evidenced by research institutions like Tsinghua University and Penn State Research Foundation contributing foundational advances, positioning this technology domain for continued expansion in precision control applications.
Honda Motor Co., Ltd.
Technical Solution: Honda implements advanced feedback linearization control systems in their automotive applications, particularly for engine management and vehicle stability control. Their approach combines real-time sensor feedback with predictive feedforward algorithms to optimize performance across varying driving conditions. The system utilizes multi-variable control strategies that linearize nonlinear vehicle dynamics, enabling precise torque vectoring and stability management. Honda's implementation focuses on computational efficiency to meet automotive real-time constraints while maintaining robust performance under parameter uncertainties and external disturbances.
Strengths: Proven automotive implementation experience, robust real-time performance optimization. Weaknesses: Limited to automotive domain applications, conservative approach may limit innovation speed.
QUALCOMM, Inc.
Technical Solution: Qualcomm develops sophisticated control algorithms for wireless communication systems, implementing both feedback linearization and feedforward control for power amplifier linearization and signal processing. Their solutions address nonlinear distortions in RF systems through adaptive digital predistortion techniques combined with real-time feedback mechanisms. The technology enables dynamic adjustment of transmission parameters to maintain signal quality while optimizing power efficiency. Qualcomm's approach integrates machine learning algorithms with traditional control theory to enhance real-time adaptation capabilities in rapidly changing wireless environments.
Strengths: Leading wireless technology expertise, advanced signal processing capabilities, strong real-time optimization. Weaknesses: Primarily focused on communication applications, may have limited cross-industry applicability.
Core Patents in Feedback Linearization Technologies
Method and system for combining feedback and feedforward in model predictive control
PatentActiveEP2267559A3
Innovation
- An improved method integrates an externally computed, accurate feedforward signal with a feedback model-based predictive control system, using a state observer to estimate the feedforward signal and manipulate constraints, ensuring the control system operates within desired limits and maintaining stability.


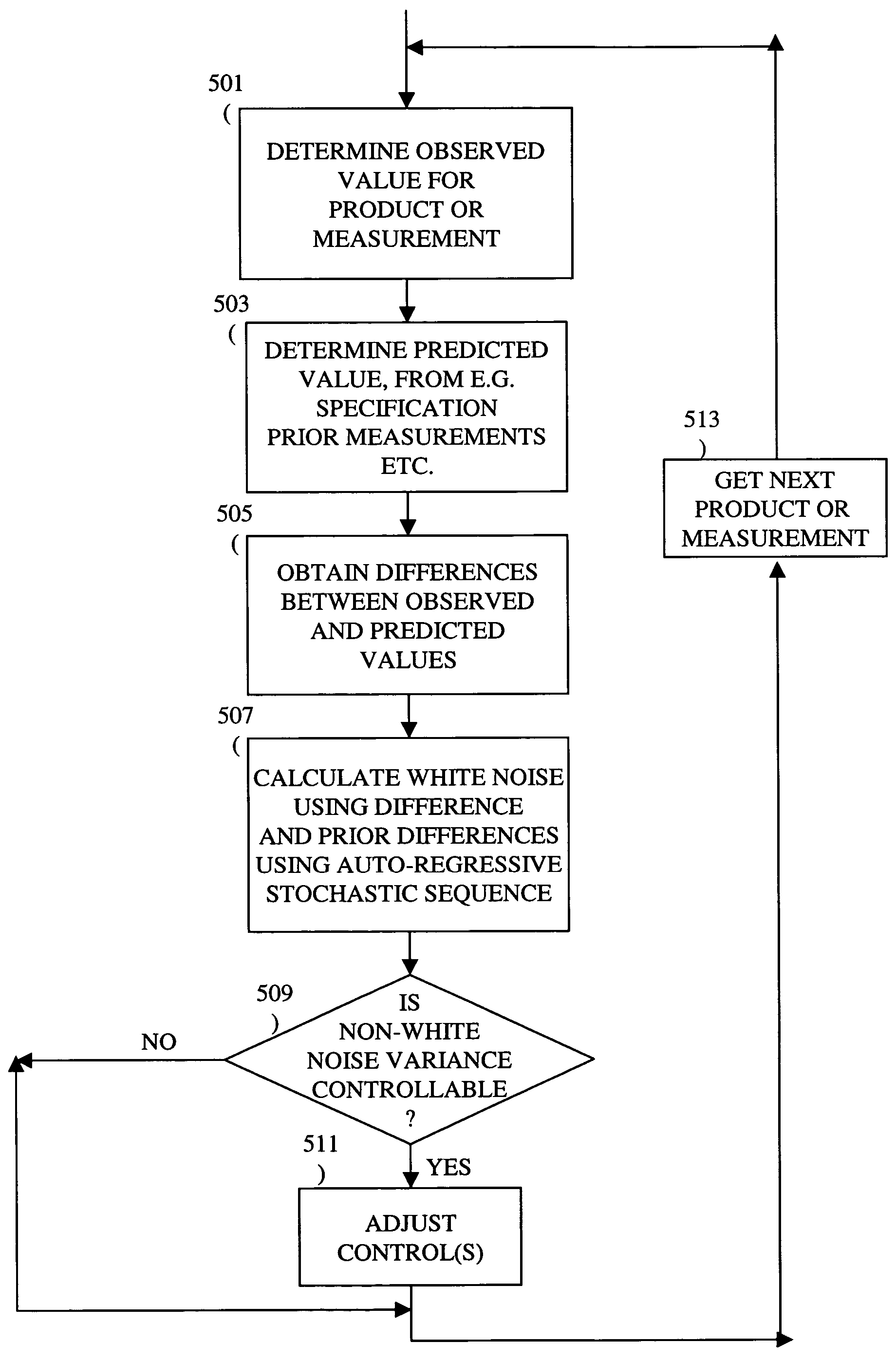
Adjusting manufacturing process control parameter using updated process threshold derived from uncontrollable error
PatentInactiveUS7349753B2
Innovation
- A method that uses an autoregressive stochastic sequence to calculate and separate the variance caused by white noise and systematic errors, allowing for dynamic threshold adjustments in real-time control, enabling tighter feedback and feedforward control by distinguishing between controllable and uncontrollable error components.

Safety Standards for Real-Time Control Applications
Real-time control applications involving feedback linearization and feedforward control strategies must adhere to stringent safety standards to ensure reliable operation in critical systems. The International Electrotechnical Commission (IEC) 61508 standard serves as the foundational framework for functional safety in electrical, electronic, and programmable electronic safety-related systems. This standard establishes Safety Integrity Levels (SIL) ranging from SIL 1 to SIL 4, with each level defining specific requirements for risk reduction and system reliability.
For automotive applications, ISO 26262 provides specialized safety requirements that directly impact real-time control implementations. This standard mandates Automotive Safety Integrity Levels (ASIL) from A to D, where ASIL D represents the highest safety criticality. Control systems employing feedback linearization techniques must demonstrate deterministic response times and bounded computational delays to meet these automotive safety requirements.
The DO-178C standard governs software considerations in airborne systems, establishing rigorous verification and validation procedures for real-time control algorithms. Feedback linearization controllers in aerospace applications must undergo extensive testing to prove their behavior under all operational conditions, including failure modes and degraded performance scenarios.
Industrial automation systems follow IEC 61511 for process industry safety instrumented systems. This standard requires real-time control applications to implement systematic approaches for hazard analysis, risk assessment, and safety lifecycle management. Feedforward control strategies must demonstrate predictable performance characteristics and fail-safe behaviors when integrated into safety instrumented functions.
Real-time operating system standards such as POSIX.1b and ARINC 653 establish timing requirements and resource management protocols essential for safety-critical control applications. These standards ensure deterministic task scheduling, memory protection, and inter-process communication mechanisms that support reliable execution of complex control algorithms.
Certification processes for safety-critical real-time control systems require comprehensive documentation of system architecture, software design, verification procedures, and operational constraints. Independent safety assessors evaluate compliance with applicable standards, focusing on worst-case execution time analysis, fault tolerance mechanisms, and emergency response procedures to validate system safety integrity.
For automotive applications, ISO 26262 provides specialized safety requirements that directly impact real-time control implementations. This standard mandates Automotive Safety Integrity Levels (ASIL) from A to D, where ASIL D represents the highest safety criticality. Control systems employing feedback linearization techniques must demonstrate deterministic response times and bounded computational delays to meet these automotive safety requirements.
The DO-178C standard governs software considerations in airborne systems, establishing rigorous verification and validation procedures for real-time control algorithms. Feedback linearization controllers in aerospace applications must undergo extensive testing to prove their behavior under all operational conditions, including failure modes and degraded performance scenarios.
Industrial automation systems follow IEC 61511 for process industry safety instrumented systems. This standard requires real-time control applications to implement systematic approaches for hazard analysis, risk assessment, and safety lifecycle management. Feedforward control strategies must demonstrate predictable performance characteristics and fail-safe behaviors when integrated into safety instrumented functions.
Real-time operating system standards such as POSIX.1b and ARINC 653 establish timing requirements and resource management protocols essential for safety-critical control applications. These standards ensure deterministic task scheduling, memory protection, and inter-process communication mechanisms that support reliable execution of complex control algorithms.
Certification processes for safety-critical real-time control systems require comprehensive documentation of system architecture, software design, verification procedures, and operational constraints. Independent safety assessors evaluate compliance with applicable standards, focusing on worst-case execution time analysis, fault tolerance mechanisms, and emergency response procedures to validate system safety integrity.
Computational Complexity Trade-offs in Control Design
The computational complexity trade-offs between feedback linearization and feedforward control strategies represent a fundamental design consideration in real-time control systems. These trade-offs directly impact system performance, implementation feasibility, and resource allocation in embedded control architectures.
Feedback linearization techniques typically exhibit higher computational overhead due to their requirement for real-time nonlinear transformation calculations. The method necessitates continuous computation of Lie derivatives, Jacobian matrices, and inverse dynamics models. For an n-dimensional nonlinear system, the computational complexity scales approximately as O(n³) for matrix inversions and O(n²) for derivative calculations. This computational burden becomes particularly pronounced in high-frequency control loops where sampling rates exceed 1 kHz.
Feedforward control strategies generally demonstrate lower computational complexity, operating primarily through pre-computed lookup tables or polynomial approximations. The computational load scales linearly with system complexity, typically requiring O(n) operations per control cycle. However, the memory requirements for storing comprehensive feedforward maps can become substantial, particularly for multi-dimensional input spaces requiring fine resolution.
Real-time implementation constraints impose critical limitations on both approaches. Feedback linearization systems must complete nonlinear computations within strict timing deadlines, often requiring specialized hardware acceleration or approximation algorithms. Modern embedded processors with floating-point units can handle moderate complexity feedback linearization for systems up to 6-8 states at kilohertz rates.
The trade-off analysis reveals that feedforward control excels in scenarios with predictable disturbances and well-characterized system dynamics, offering deterministic computational loads suitable for hard real-time applications. Conversely, feedback linearization provides superior robustness to model uncertainties and external disturbances, justifying its higher computational cost in applications where precision and adaptability are paramount.
Hybrid approaches increasingly emerge as optimal solutions, combining feedforward baseline control with simplified feedback linearization corrections. These architectures balance computational efficiency with control performance, typically reducing overall complexity by 40-60% compared to pure feedback linearization while maintaining acceptable disturbance rejection capabilities.
Feedback linearization techniques typically exhibit higher computational overhead due to their requirement for real-time nonlinear transformation calculations. The method necessitates continuous computation of Lie derivatives, Jacobian matrices, and inverse dynamics models. For an n-dimensional nonlinear system, the computational complexity scales approximately as O(n³) for matrix inversions and O(n²) for derivative calculations. This computational burden becomes particularly pronounced in high-frequency control loops where sampling rates exceed 1 kHz.
Feedforward control strategies generally demonstrate lower computational complexity, operating primarily through pre-computed lookup tables or polynomial approximations. The computational load scales linearly with system complexity, typically requiring O(n) operations per control cycle. However, the memory requirements for storing comprehensive feedforward maps can become substantial, particularly for multi-dimensional input spaces requiring fine resolution.
Real-time implementation constraints impose critical limitations on both approaches. Feedback linearization systems must complete nonlinear computations within strict timing deadlines, often requiring specialized hardware acceleration or approximation algorithms. Modern embedded processors with floating-point units can handle moderate complexity feedback linearization for systems up to 6-8 states at kilohertz rates.
The trade-off analysis reveals that feedforward control excels in scenarios with predictable disturbances and well-characterized system dynamics, offering deterministic computational loads suitable for hard real-time applications. Conversely, feedback linearization provides superior robustness to model uncertainties and external disturbances, justifying its higher computational cost in applications where precision and adaptability are paramount.
Hybrid approaches increasingly emerge as optimal solutions, combining feedforward baseline control with simplified feedback linearization corrections. These architectures balance computational efficiency with control performance, typically reducing overall complexity by 40-60% compared to pure feedback linearization while maintaining acceptable disturbance rejection capabilities.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!