How to Enhance Electrostatic Actuator Motion Profiles
MAR 10, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Electrostatic Actuator Technology Background and Enhancement Goals
Electrostatic actuators represent a fundamental class of microelectromechanical systems (MEMS) devices that have evolved significantly since their inception in the 1960s. These devices operate on the principle of electrostatic force generation between charged electrodes, converting electrical energy directly into mechanical motion without requiring magnetic fields or complex mechanical linkages. The technology emerged from early research in capacitive sensing and has matured into sophisticated actuation systems capable of precise positioning and control.
The historical development of electrostatic actuators can be traced through several key phases. Initial developments focused on simple parallel-plate configurations used primarily in research applications. The 1980s marked a pivotal period with the advancement of silicon micromachining techniques, enabling the fabrication of more complex electrode geometries and integrated control circuits. The subsequent decades witnessed the emergence of comb-drive actuators, gap-closing designs, and rotary configurations, each addressing specific application requirements and performance limitations.
Current electrostatic actuator technology encompasses diverse architectural approaches, including lateral comb drives, vertical gap-closing actuators, and rotational designs. These configurations offer distinct advantages in terms of force generation, displacement range, and power consumption characteristics. Modern implementations integrate advanced materials such as high-k dielectrics and nanostructured surfaces to enhance performance metrics while maintaining compatibility with standard semiconductor fabrication processes.
The primary technical objectives driving enhancement efforts center on improving motion profile characteristics, including displacement accuracy, response time, linearity, and repeatability. Traditional electrostatic actuators face inherent limitations such as pull-in instability, nonlinear force-displacement relationships, and limited stroke length. These constraints have motivated extensive research into novel electrode designs, advanced control algorithms, and hybrid actuation schemes.
Contemporary enhancement goals focus on achieving higher force densities while maintaining low power consumption, extending operational voltage ranges to improve safety and integration compatibility, and developing predictable motion profiles suitable for precision positioning applications. Additionally, there is significant emphasis on improving long-term reliability and reducing manufacturing complexity to enable cost-effective mass production for commercial applications across automotive, consumer electronics, and industrial automation sectors.
The historical development of electrostatic actuators can be traced through several key phases. Initial developments focused on simple parallel-plate configurations used primarily in research applications. The 1980s marked a pivotal period with the advancement of silicon micromachining techniques, enabling the fabrication of more complex electrode geometries and integrated control circuits. The subsequent decades witnessed the emergence of comb-drive actuators, gap-closing designs, and rotary configurations, each addressing specific application requirements and performance limitations.
Current electrostatic actuator technology encompasses diverse architectural approaches, including lateral comb drives, vertical gap-closing actuators, and rotational designs. These configurations offer distinct advantages in terms of force generation, displacement range, and power consumption characteristics. Modern implementations integrate advanced materials such as high-k dielectrics and nanostructured surfaces to enhance performance metrics while maintaining compatibility with standard semiconductor fabrication processes.
The primary technical objectives driving enhancement efforts center on improving motion profile characteristics, including displacement accuracy, response time, linearity, and repeatability. Traditional electrostatic actuators face inherent limitations such as pull-in instability, nonlinear force-displacement relationships, and limited stroke length. These constraints have motivated extensive research into novel electrode designs, advanced control algorithms, and hybrid actuation schemes.
Contemporary enhancement goals focus on achieving higher force densities while maintaining low power consumption, extending operational voltage ranges to improve safety and integration compatibility, and developing predictable motion profiles suitable for precision positioning applications. Additionally, there is significant emphasis on improving long-term reliability and reducing manufacturing complexity to enable cost-effective mass production for commercial applications across automotive, consumer electronics, and industrial automation sectors.
Market Demand for Advanced Electrostatic Actuator Systems
The global market for advanced electrostatic actuator systems is experiencing significant growth driven by the increasing demand for precision motion control across multiple industries. The miniaturization trend in electronics, coupled with the need for ultra-precise positioning in semiconductor manufacturing, optical systems, and biomedical devices, has created substantial opportunities for enhanced electrostatic actuator technologies.
Semiconductor fabrication represents one of the most demanding applications, where nanometer-level positioning accuracy is essential for next-generation lithography systems and wafer inspection equipment. The industry's transition toward smaller process nodes requires actuators capable of delivering improved motion profiles with reduced settling times and enhanced repeatability. This demand is particularly acute in extreme ultraviolet lithography systems and advanced packaging technologies.
The optical and photonics sector demonstrates strong market pull for electrostatic actuators with superior motion characteristics. Applications in adaptive optics, laser beam steering, and high-resolution imaging systems require actuators that can provide smooth, continuous motion profiles without mechanical backlash or hysteresis. The growing deployment of autonomous vehicles and advanced driver assistance systems further amplifies this demand through requirements for precise LiDAR scanning mechanisms.
Biomedical and life sciences applications present another significant market driver, particularly in microscopy, surgical robotics, and drug delivery systems. These applications demand actuators with exceptional motion smoothness and the ability to operate in sterile environments without electromagnetic interference. The increasing adoption of minimally invasive surgical procedures and point-of-care diagnostic devices continues to expand this market segment.
Consumer electronics and mobile devices increasingly require compact electrostatic actuators for camera stabilization, haptic feedback, and micro-positioning applications. The market demand focuses on actuators that can deliver enhanced motion profiles while maintaining low power consumption and compact form factors. The proliferation of augmented reality and virtual reality devices creates additional opportunities for advanced electrostatic actuator systems with improved dynamic response characteristics.
Industrial automation and precision manufacturing sectors seek electrostatic actuators capable of delivering consistent motion profiles under varying environmental conditions. Applications in pick-and-place systems, precision assembly, and quality inspection equipment drive demand for actuators with enhanced reliability and predictable motion characteristics across extended operational periods.
Semiconductor fabrication represents one of the most demanding applications, where nanometer-level positioning accuracy is essential for next-generation lithography systems and wafer inspection equipment. The industry's transition toward smaller process nodes requires actuators capable of delivering improved motion profiles with reduced settling times and enhanced repeatability. This demand is particularly acute in extreme ultraviolet lithography systems and advanced packaging technologies.
The optical and photonics sector demonstrates strong market pull for electrostatic actuators with superior motion characteristics. Applications in adaptive optics, laser beam steering, and high-resolution imaging systems require actuators that can provide smooth, continuous motion profiles without mechanical backlash or hysteresis. The growing deployment of autonomous vehicles and advanced driver assistance systems further amplifies this demand through requirements for precise LiDAR scanning mechanisms.
Biomedical and life sciences applications present another significant market driver, particularly in microscopy, surgical robotics, and drug delivery systems. These applications demand actuators with exceptional motion smoothness and the ability to operate in sterile environments without electromagnetic interference. The increasing adoption of minimally invasive surgical procedures and point-of-care diagnostic devices continues to expand this market segment.
Consumer electronics and mobile devices increasingly require compact electrostatic actuators for camera stabilization, haptic feedback, and micro-positioning applications. The market demand focuses on actuators that can deliver enhanced motion profiles while maintaining low power consumption and compact form factors. The proliferation of augmented reality and virtual reality devices creates additional opportunities for advanced electrostatic actuator systems with improved dynamic response characteristics.
Industrial automation and precision manufacturing sectors seek electrostatic actuators capable of delivering consistent motion profiles under varying environmental conditions. Applications in pick-and-place systems, precision assembly, and quality inspection equipment drive demand for actuators with enhanced reliability and predictable motion characteristics across extended operational periods.
Current State and Motion Profile Limitations
Electrostatic actuators currently face significant limitations in achieving precise and versatile motion profiles, constraining their widespread adoption in advanced applications. The fundamental challenge stems from the inherent nonlinear relationship between applied voltage and generated force, which follows a quadratic dependency. This nonlinearity creates substantial difficulties in implementing linear control strategies and achieving predictable motion characteristics across different operating ranges.
The pull-in phenomenon represents one of the most critical limitations affecting motion profile control. When the gap between electrodes reduces to approximately one-third of the initial separation distance, the electrostatic force becomes unstable, leading to sudden electrode collapse. This phenomenon severely restricts the usable displacement range and creates discontinuous motion profiles that are difficult to control precisely.
Current electrostatic actuators exhibit limited force output capabilities compared to electromagnetic and piezoelectric alternatives. The force generation is inversely proportional to the square of the electrode gap, resulting in rapidly diminishing actuation force as displacement increases. This characteristic makes it challenging to maintain consistent motion profiles throughout the entire operational range, particularly for applications requiring sustained force delivery over extended displacements.
Voltage requirements present another significant constraint in motion profile enhancement. Achieving meaningful displacement and force levels often necessitates high operating voltages, typically ranging from hundreds to thousands of volts. These elevated voltage requirements introduce safety concerns, increase power consumption, and complicate drive electronics design, ultimately limiting the practical implementation of sophisticated motion control algorithms.
Hysteresis effects and charge trapping phenomena further degrade motion profile accuracy and repeatability. Dielectric materials used in electrostatic actuators can retain residual charges, leading to unpredictable force variations and drift in positioning accuracy over time. These effects become particularly pronounced during complex motion profiles involving rapid direction changes or sustained positioning requirements.
Temperature sensitivity and environmental factors significantly impact motion profile stability. Dielectric properties, mechanical stiffness, and dimensional stability of actuator components vary with temperature, humidity, and other environmental conditions. These variations introduce uncertainties in force generation and displacement characteristics, making it difficult to maintain consistent motion profiles across different operating environments.
The bandwidth limitations of current electrostatic actuators also constrain dynamic motion profile capabilities. While these devices can theoretically operate at high frequencies due to their low moving mass, practical limitations arise from charging and discharging times of the capacitive structure, parasitic effects, and drive circuit constraints. These factors limit the achievable speed and acceleration profiles, particularly for applications requiring rapid response times or high-frequency oscillatory motions.
The pull-in phenomenon represents one of the most critical limitations affecting motion profile control. When the gap between electrodes reduces to approximately one-third of the initial separation distance, the electrostatic force becomes unstable, leading to sudden electrode collapse. This phenomenon severely restricts the usable displacement range and creates discontinuous motion profiles that are difficult to control precisely.
Current electrostatic actuators exhibit limited force output capabilities compared to electromagnetic and piezoelectric alternatives. The force generation is inversely proportional to the square of the electrode gap, resulting in rapidly diminishing actuation force as displacement increases. This characteristic makes it challenging to maintain consistent motion profiles throughout the entire operational range, particularly for applications requiring sustained force delivery over extended displacements.
Voltage requirements present another significant constraint in motion profile enhancement. Achieving meaningful displacement and force levels often necessitates high operating voltages, typically ranging from hundreds to thousands of volts. These elevated voltage requirements introduce safety concerns, increase power consumption, and complicate drive electronics design, ultimately limiting the practical implementation of sophisticated motion control algorithms.
Hysteresis effects and charge trapping phenomena further degrade motion profile accuracy and repeatability. Dielectric materials used in electrostatic actuators can retain residual charges, leading to unpredictable force variations and drift in positioning accuracy over time. These effects become particularly pronounced during complex motion profiles involving rapid direction changes or sustained positioning requirements.
Temperature sensitivity and environmental factors significantly impact motion profile stability. Dielectric properties, mechanical stiffness, and dimensional stability of actuator components vary with temperature, humidity, and other environmental conditions. These variations introduce uncertainties in force generation and displacement characteristics, making it difficult to maintain consistent motion profiles across different operating environments.
The bandwidth limitations of current electrostatic actuators also constrain dynamic motion profile capabilities. While these devices can theoretically operate at high frequencies due to their low moving mass, practical limitations arise from charging and discharging times of the capacitive structure, parasitic effects, and drive circuit constraints. These factors limit the achievable speed and acceleration profiles, particularly for applications requiring rapid response times or high-frequency oscillatory motions.
Existing Motion Profile Enhancement Solutions
01 Control methods for electrostatic actuator displacement
Various control methods are employed to manage the displacement and motion of electrostatic actuators. These methods include feedback control systems, voltage modulation techniques, and position sensing mechanisms to achieve precise movement profiles. The control strategies enable accurate positioning and smooth motion trajectories by adjusting the applied electric field in response to real-time position data.- Control methods for electrostatic actuator displacement: Various control methods are employed to manage the displacement and motion of electrostatic actuators. These methods include feedback control systems, voltage modulation techniques, and position sensing mechanisms to achieve precise movement profiles. The control strategies enable accurate positioning and smooth motion transitions by adjusting the applied electric field based on real-time measurements of actuator position and velocity.
- Waveform generation for electrostatic actuation: Specific voltage waveforms and signal profiles are designed to drive electrostatic actuators through desired motion trajectories. These waveforms can include stepped voltages, ramped signals, or complex time-varying patterns that optimize actuator response characteristics such as speed, acceleration, and settling time. The waveform design considers factors like capacitance changes, electrostatic force variations, and mechanical resonances to achieve optimal performance.
- Motion profile optimization for reduced settling time: Techniques for optimizing motion profiles focus on minimizing settling time and overshoot in electrostatic actuator systems. These approaches involve trajectory planning algorithms that shape the acceleration and deceleration phases to reduce vibrations and achieve faster stabilization at target positions. Mathematical models and simulation tools are used to predict actuator behavior and refine motion profiles for improved dynamic performance.
- Multi-phase actuation sequences: Multi-phase actuation sequences involve dividing the motion profile into distinct phases with different control parameters for each phase. This approach allows for independent optimization of startup, steady-state motion, and stopping phases. The technique is particularly useful for applications requiring complex motion patterns or when dealing with varying load conditions, enabling better energy efficiency and motion accuracy throughout the entire actuation cycle.
- Adaptive motion profiling based on environmental conditions: Adaptive motion profiling techniques adjust actuator control parameters in response to changing environmental conditions such as temperature, humidity, or mechanical loading. These systems incorporate sensors and algorithms that monitor operating conditions and modify motion profiles dynamically to maintain consistent performance. The adaptation mechanisms compensate for variations in electrostatic force generation and mechanical properties that occur due to environmental factors.
02 Voltage waveform optimization for motion control
The motion profiles of electrostatic actuators can be optimized through careful design of voltage waveforms applied to the electrodes. Different waveform shapes, including step functions, ramp profiles, and sinusoidal patterns, affect the acceleration, velocity, and settling characteristics of the actuator. Waveform optimization techniques help minimize overshoot, reduce settling time, and improve overall motion quality.Expand Specific Solutions03 Multi-phase actuation sequences
Multi-phase actuation involves sequential or simultaneous activation of multiple electrode pairs to create complex motion profiles. This approach enables more sophisticated movement patterns, including multi-axis motion, rotational movements, and programmable trajectories. The coordination of multiple actuation phases allows for enhanced flexibility in motion control and improved performance characteristics.Expand Specific Solutions04 Compensation techniques for nonlinear behavior
Electrostatic actuators exhibit inherent nonlinear characteristics due to the quadratic relationship between voltage and force. Compensation techniques address these nonlinearities to achieve linear motion profiles. Methods include linearization algorithms, adaptive control schemes, and calibration procedures that account for pull-in effects, fringing fields, and other nonlinear phenomena to produce predictable motion responses.Expand Specific Solutions05 Dynamic motion profiling for high-speed applications
High-speed electrostatic actuator applications require specialized motion profiling techniques to manage dynamic effects such as inertia, damping, and resonance. Dynamic profiling methods incorporate acceleration limits, jerk control, and trajectory planning algorithms to optimize motion performance at high speeds while maintaining stability and precision. These techniques are particularly important for applications requiring rapid response times and high-frequency operation.Expand Specific Solutions
Key Players in Electrostatic Actuator Industry
The electrostatic actuator motion profile enhancement field represents an emerging technology sector in the early growth stage, with significant market potential driven by increasing demand for precise micro-positioning in consumer electronics, automotive systems, and industrial automation. The market demonstrates moderate technical maturity, with established players like Samsung Electronics, Murata Manufacturing, and OMRON leading component development, while companies such as Alps Alpine, DENSO, and Mitsubishi Electric focus on automotive applications. Academic institutions including University of Tokyo, Peking University, and Beihang University contribute fundamental research, indicating strong R&D foundations. Technology leaders like Toshiba, Seiko Epson, and Philips are advancing actuator integration in consumer devices, while specialized firms such as Festo and Schaeffler develop industrial solutions. The competitive landscape shows a mix of semiconductor giants, automotive suppliers, and precision component manufacturers, suggesting technology convergence across multiple sectors with varying levels of commercialization maturity.
Murata Manufacturing Co. Ltd.
Technical Solution: Murata specializes in piezoelectric and electrostatic micro-actuators with enhanced motion profiles through their proprietary ceramic material technologies. Their electrostatic actuators utilize ultra-thin dielectric layers and optimized electrode patterns to achieve high force density and precise positioning. The company has developed innovative drive electronics that implement variable voltage control and frequency modulation techniques to enhance actuator response characteristics. Murata's motion enhancement solutions include integrated sensor feedback systems and advanced signal processing algorithms that compensate for nonlinear actuator behavior. Their actuators feature low-power operation modes and rapid response times, making them suitable for portable devices and precision positioning applications.
Strengths: Excellent ceramic material expertise, miniaturization capabilities, high-volume manufacturing experience. Weaknesses: Limited customization options for specialized applications, focus mainly on standard product lines.
Samsung Electronics Co., Ltd.
Technical Solution: Samsung has developed advanced electrostatic actuator systems utilizing multi-layer ceramic capacitor (MLCC) technology for enhanced motion control. Their approach incorporates high-voltage drive circuits with precise timing control algorithms to optimize displacement profiles. The company employs sophisticated feedback control systems using capacitive sensing to monitor actuator position in real-time, enabling closed-loop control for improved accuracy. Samsung's electrostatic actuators feature optimized electrode geometries and dielectric materials to maximize force generation while minimizing power consumption. Their motion enhancement techniques include pulse-width modulation (PWM) control strategies and adaptive voltage scaling to achieve smooth, precise movements across different operating conditions.
Strengths: Strong semiconductor manufacturing capabilities, advanced materials expertise, integrated circuit design proficiency. Weaknesses: Limited focus on specialized actuator applications, primarily consumer electronics oriented.
Core Innovations in Electrostatic Motion Control
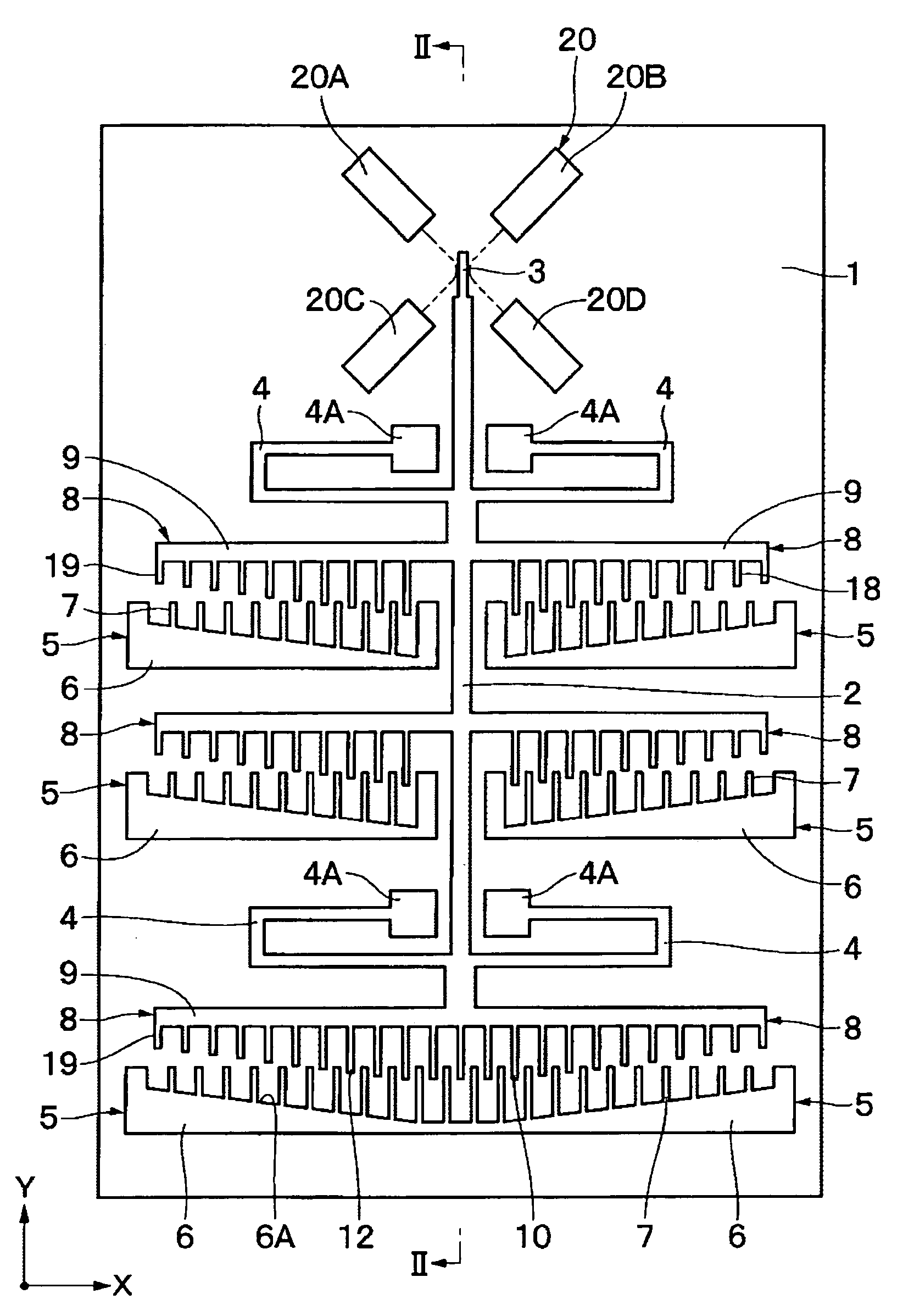
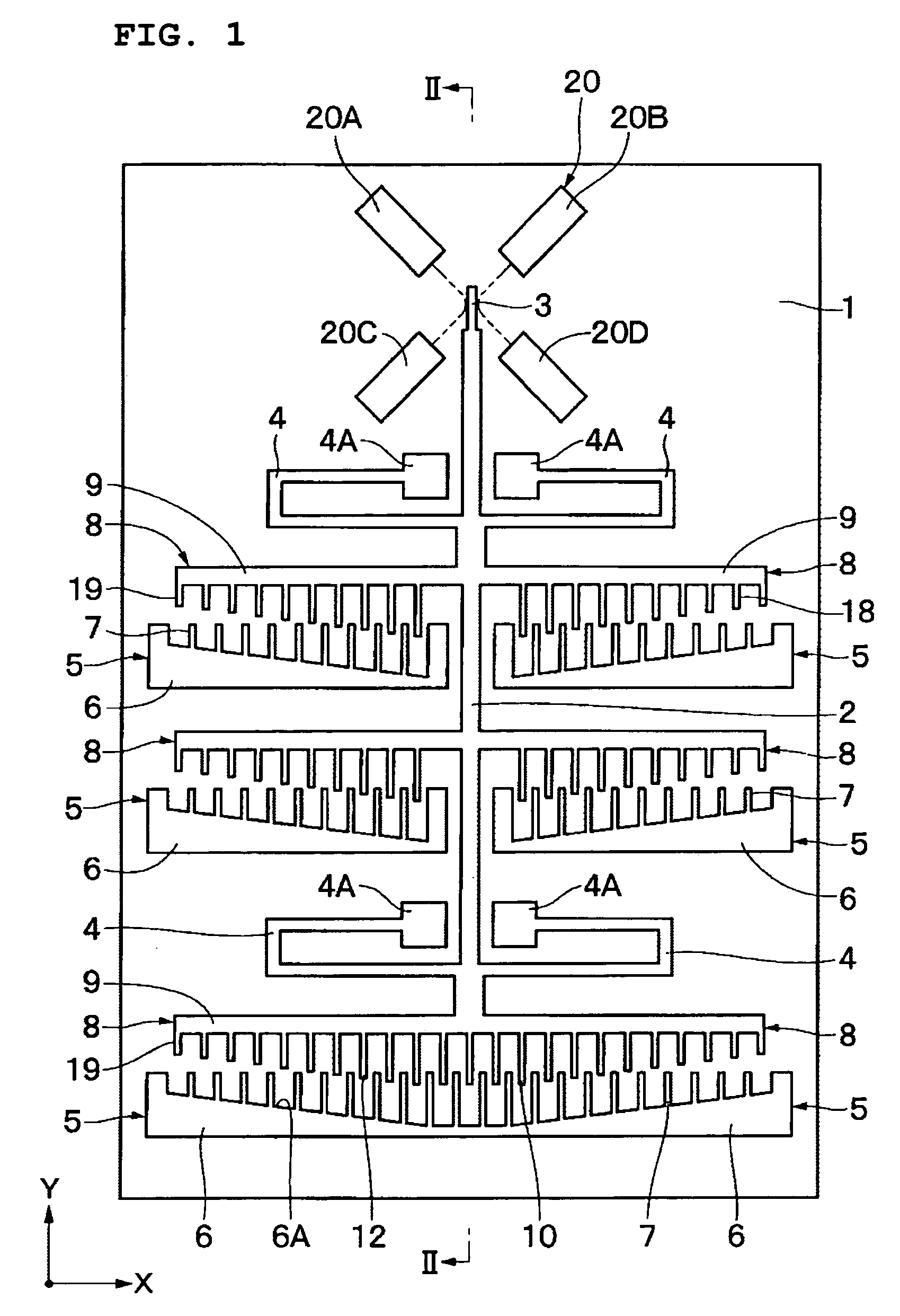
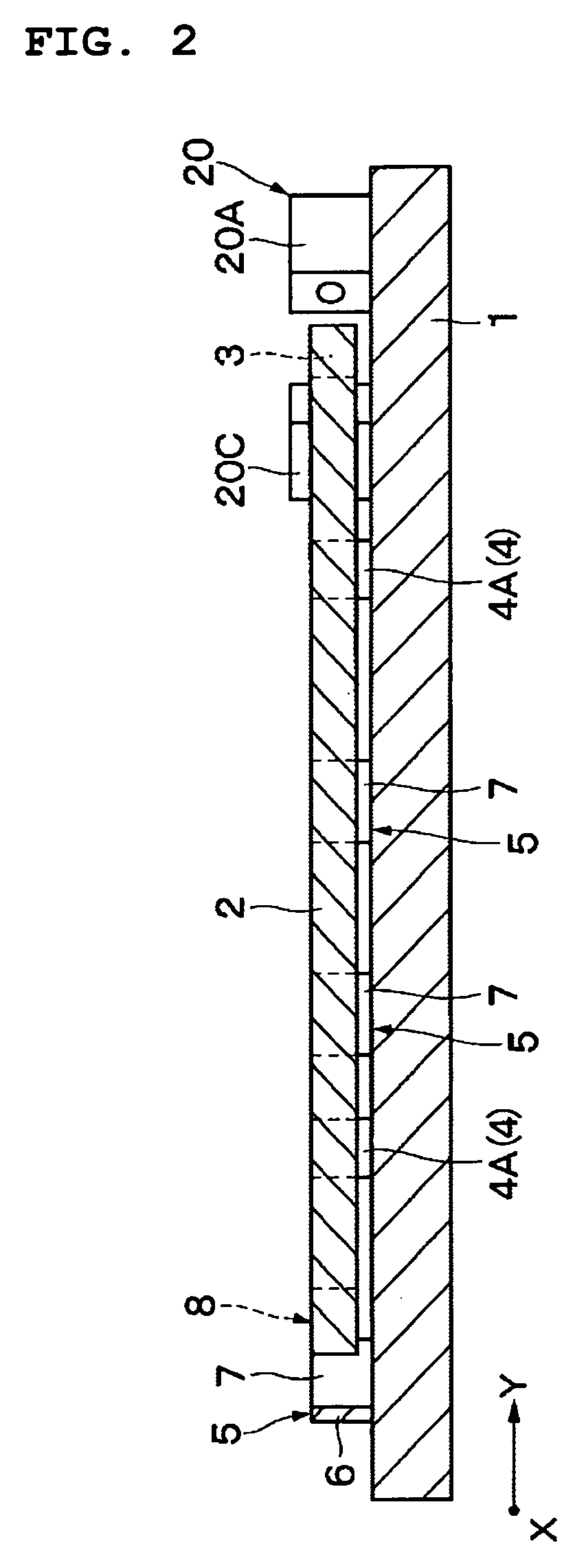
Electrostatic actuator
PatentInactiveUS7113386B2
Innovation
- The electrostatic actuator design features electrode plates of varying lengths, arranged in a comb-like pattern, where the movable piece is displaced by sequential meshing of electrode plates with increasing length differences, minimizing overlapping lengths and balancing electrostatic forces to prevent inclination and ensure stable displacement.

Electrostatic actuator
PatentInactiveUS20230369992A1
Innovation
- The design incorporates a stator and mover with multiple capacitor structures, where one includes first counter electrodes and non-counter electrodes, and the other includes second counter electrodes, arranged in a circular configuration to generate attractive and repulsive forces efficiently, allowing for faster and higher-power operation.




Control Algorithm Development for Enhanced Motion
The development of advanced control algorithms represents a critical pathway for enhancing electrostatic actuator motion profiles, addressing fundamental limitations in precision, speed, and stability that have historically constrained their widespread adoption. Modern control strategies must overcome the inherent nonlinear characteristics of electrostatic forces, which scale quadratically with applied voltage and exhibit complex dependencies on gap distances and environmental conditions.
Adaptive control algorithms have emerged as particularly promising solutions, incorporating real-time feedback mechanisms that continuously adjust control parameters based on actuator performance metrics. These systems utilize sophisticated sensor integration to monitor position, velocity, and acceleration, enabling dynamic compensation for manufacturing tolerances, temperature variations, and aging effects that traditionally degrade motion accuracy over time.
Model predictive control approaches offer significant advantages by anticipating future system states and optimizing control inputs accordingly. These algorithms incorporate mathematical models of electrostatic force dynamics, allowing for proactive adjustment of voltage profiles to achieve desired motion trajectories while minimizing settling time and overshoot. The computational requirements, while substantial, are increasingly manageable with modern embedded processing capabilities.
Machine learning-enhanced control strategies represent an emerging frontier, leveraging neural networks and reinforcement learning to optimize motion profiles through iterative performance improvement. These systems can automatically discover optimal control parameters for specific applications, adapting to unique operating conditions and performance requirements without extensive manual tuning.
Hybrid control architectures combining multiple algorithmic approaches show particular promise for complex motion requirements. These systems might employ feedforward control for predictable motion components while utilizing feedback control for disturbance rejection and precision maintenance. The integration of multiple control layers enables robust performance across diverse operating conditions and application scenarios.
Implementation considerations include real-time processing constraints, sensor noise management, and the need for fail-safe mechanisms to prevent actuator damage from excessive voltages or rapid motion commands that could exceed physical limitations.
Adaptive control algorithms have emerged as particularly promising solutions, incorporating real-time feedback mechanisms that continuously adjust control parameters based on actuator performance metrics. These systems utilize sophisticated sensor integration to monitor position, velocity, and acceleration, enabling dynamic compensation for manufacturing tolerances, temperature variations, and aging effects that traditionally degrade motion accuracy over time.
Model predictive control approaches offer significant advantages by anticipating future system states and optimizing control inputs accordingly. These algorithms incorporate mathematical models of electrostatic force dynamics, allowing for proactive adjustment of voltage profiles to achieve desired motion trajectories while minimizing settling time and overshoot. The computational requirements, while substantial, are increasingly manageable with modern embedded processing capabilities.
Machine learning-enhanced control strategies represent an emerging frontier, leveraging neural networks and reinforcement learning to optimize motion profiles through iterative performance improvement. These systems can automatically discover optimal control parameters for specific applications, adapting to unique operating conditions and performance requirements without extensive manual tuning.
Hybrid control architectures combining multiple algorithmic approaches show particular promise for complex motion requirements. These systems might employ feedforward control for predictable motion components while utilizing feedback control for disturbance rejection and precision maintenance. The integration of multiple control layers enables robust performance across diverse operating conditions and application scenarios.
Implementation considerations include real-time processing constraints, sensor noise management, and the need for fail-safe mechanisms to prevent actuator damage from excessive voltages or rapid motion commands that could exceed physical limitations.
Material Science Advances in Electrostatic Systems
Recent breakthroughs in material science have fundamentally transformed the landscape of electrostatic actuator systems, offering unprecedented opportunities to enhance motion profiles through advanced material properties. The development of novel dielectric materials with ultra-high permittivity values has emerged as a cornerstone technology, enabling actuators to generate significantly higher forces at lower operating voltages while maintaining precise control characteristics.
High-performance polymer composites incorporating ceramic nanoparticles have demonstrated remarkable improvements in electrostatic field distribution uniformity. These materials exhibit enhanced breakdown strength exceeding 500 MV/m, coupled with reduced dielectric losses that directly translate to improved actuator efficiency and thermal stability. The integration of graphene oxide sheets within polymer matrices has shown particular promise in creating materials with tunable dielectric properties.
Advanced electrode materials represent another critical frontier in electrostatic system enhancement. Transparent conductive oxides, particularly indium tin oxide variants with optimized surface textures, have enabled more uniform electric field generation across actuator surfaces. These materials maintain excellent conductivity while providing optical transparency essential for many precision applications.
Smart materials with adaptive properties are revolutionizing actuator design paradigms. Shape memory polymers integrated into electrostatic systems allow for programmable motion profiles that can be dynamically adjusted based on operational requirements. These materials respond to electrical stimuli by altering their mechanical properties, creating hybrid actuation mechanisms that combine electrostatic forces with material-based shape changes.
Nanostructured surface treatments have proven instrumental in reducing parasitic effects that traditionally limit actuator performance. Anti-stiction coatings based on fluorinated silanes and diamond-like carbon films minimize unwanted adhesion forces, while maintaining the high surface quality necessary for consistent electrostatic field generation. These treatments extend operational lifetime and improve repeatability of motion profiles.
The emergence of metamaterials with engineered electromagnetic properties opens new possibilities for field shaping and force distribution control. These artificially structured materials can manipulate electric field patterns in ways impossible with conventional materials, enabling more sophisticated motion control strategies and improved actuator linearity across extended operating ranges.
High-performance polymer composites incorporating ceramic nanoparticles have demonstrated remarkable improvements in electrostatic field distribution uniformity. These materials exhibit enhanced breakdown strength exceeding 500 MV/m, coupled with reduced dielectric losses that directly translate to improved actuator efficiency and thermal stability. The integration of graphene oxide sheets within polymer matrices has shown particular promise in creating materials with tunable dielectric properties.
Advanced electrode materials represent another critical frontier in electrostatic system enhancement. Transparent conductive oxides, particularly indium tin oxide variants with optimized surface textures, have enabled more uniform electric field generation across actuator surfaces. These materials maintain excellent conductivity while providing optical transparency essential for many precision applications.
Smart materials with adaptive properties are revolutionizing actuator design paradigms. Shape memory polymers integrated into electrostatic systems allow for programmable motion profiles that can be dynamically adjusted based on operational requirements. These materials respond to electrical stimuli by altering their mechanical properties, creating hybrid actuation mechanisms that combine electrostatic forces with material-based shape changes.
Nanostructured surface treatments have proven instrumental in reducing parasitic effects that traditionally limit actuator performance. Anti-stiction coatings based on fluorinated silanes and diamond-like carbon films minimize unwanted adhesion forces, while maintaining the high surface quality necessary for consistent electrostatic field generation. These treatments extend operational lifetime and improve repeatability of motion profiles.
The emergence of metamaterials with engineered electromagnetic properties opens new possibilities for field shaping and force distribution control. These artificially structured materials can manipulate electric field patterns in ways impossible with conventional materials, enabling more sophisticated motion control strategies and improved actuator linearity across extended operating ranges.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!