Integrate Biomimetic Actuators for Enhanced Flexibility
APR 20, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Biomimetic Actuator Integration Background and Objectives
The integration of biomimetic actuators represents a paradigm shift in robotics and automation, drawing inspiration from nature's most efficient movement mechanisms. Traditional rigid actuators have long dominated industrial applications, but their limitations in achieving natural, fluid motion have become increasingly apparent as robotics ventures into more complex environments requiring human-like dexterity and adaptability.
Biomimetic actuators emerged from decades of research into biological systems, particularly muscle fibers, plant movements, and insect locomotion. These natural systems demonstrate remarkable efficiency, self-healing capabilities, and adaptive responses that far exceed conventional mechanical systems. The field gained significant momentum in the early 2000s with advances in smart materials, including shape memory alloys, electroactive polymers, and pneumatic artificial muscles.
The evolution of this technology has been marked by several key breakthroughs. Initial developments focused on replicating basic muscle contractions using pneumatic systems. Subsequently, researchers explored electroactive polymers that could mimic the electrical activation of biological muscles. More recent innovations have incorporated multi-material designs that combine different actuation principles to achieve complex, coordinated movements similar to biological systems.
Current technological trends indicate a convergence toward hybrid actuator systems that integrate multiple biomimetic principles. These systems aim to replicate not just the mechanical aspects of biological movement, but also the sensory feedback and adaptive control mechanisms found in living organisms. The integration challenge extends beyond individual actuator performance to encompass system-level coordination and control.
The primary objective of biomimetic actuator integration is to achieve unprecedented flexibility in robotic systems while maintaining reliability and efficiency. This involves developing actuators that can seamlessly transition between different movement modes, adapt to varying load conditions, and provide compliant interaction with unpredictable environments. Enhanced flexibility encompasses both mechanical compliance and behavioral adaptability.
Secondary objectives include improving energy efficiency through bio-inspired control strategies, reducing system complexity by eliminating traditional gear trains and rigid linkages, and enabling new applications in soft robotics, prosthetics, and human-robot interaction. The ultimate goal is creating actuator systems that blur the distinction between artificial and biological movement, opening new possibilities for robotics in healthcare, exploration, and manufacturing environments requiring delicate manipulation capabilities.
Biomimetic actuators emerged from decades of research into biological systems, particularly muscle fibers, plant movements, and insect locomotion. These natural systems demonstrate remarkable efficiency, self-healing capabilities, and adaptive responses that far exceed conventional mechanical systems. The field gained significant momentum in the early 2000s with advances in smart materials, including shape memory alloys, electroactive polymers, and pneumatic artificial muscles.
The evolution of this technology has been marked by several key breakthroughs. Initial developments focused on replicating basic muscle contractions using pneumatic systems. Subsequently, researchers explored electroactive polymers that could mimic the electrical activation of biological muscles. More recent innovations have incorporated multi-material designs that combine different actuation principles to achieve complex, coordinated movements similar to biological systems.
Current technological trends indicate a convergence toward hybrid actuator systems that integrate multiple biomimetic principles. These systems aim to replicate not just the mechanical aspects of biological movement, but also the sensory feedback and adaptive control mechanisms found in living organisms. The integration challenge extends beyond individual actuator performance to encompass system-level coordination and control.
The primary objective of biomimetic actuator integration is to achieve unprecedented flexibility in robotic systems while maintaining reliability and efficiency. This involves developing actuators that can seamlessly transition between different movement modes, adapt to varying load conditions, and provide compliant interaction with unpredictable environments. Enhanced flexibility encompasses both mechanical compliance and behavioral adaptability.
Secondary objectives include improving energy efficiency through bio-inspired control strategies, reducing system complexity by eliminating traditional gear trains and rigid linkages, and enabling new applications in soft robotics, prosthetics, and human-robot interaction. The ultimate goal is creating actuator systems that blur the distinction between artificial and biological movement, opening new possibilities for robotics in healthcare, exploration, and manufacturing environments requiring delicate manipulation capabilities.
Market Demand for Flexible Biomimetic Systems
The global market for flexible biomimetic systems is experiencing unprecedented growth driven by diverse industrial applications requiring enhanced adaptability and performance. Healthcare robotics represents the largest demand segment, where surgical robots equipped with biomimetic actuators can navigate complex anatomical structures with precision previously unattainable through conventional rigid systems. The aging population worldwide has intensified the need for rehabilitation devices that can adapt to individual patient biomechanics, creating substantial market pull for flexible actuator technologies.
Manufacturing industries are increasingly adopting biomimetic flexible systems for automated assembly processes, particularly in electronics and automotive sectors. These applications demand actuators capable of handling delicate components while maintaining high-speed operation and repeatability. The trend toward miniaturization in consumer electronics has further amplified demand for micro-scale flexible actuators that can perform precise manipulation tasks in confined spaces.
Aerospace and defense sectors represent emerging high-value markets for biomimetic actuator integration. Unmanned aerial vehicles require adaptive wing structures that can optimize aerodynamic performance across varying flight conditions, while space exploration missions demand robotic systems capable of operating in extreme environments with minimal maintenance requirements. These applications prioritize reliability and autonomous adaptation capabilities over cost considerations.
The prosthetics and assistive technology market demonstrates particularly strong growth potential, driven by advances in neural interface technologies and increasing healthcare accessibility. Modern prosthetic limbs incorporating biomimetic actuators can provide users with intuitive control and natural movement patterns, significantly improving quality of life outcomes. This market segment shows high tolerance for premium pricing given the transformative impact on user experience.
Consumer robotics applications, including service robots and entertainment systems, represent the fastest-growing demand segment. These applications require actuators that can safely interact with humans while providing engaging, lifelike movements. The market emphasizes cost-effectiveness and durability for mass-market adoption, driving innovation in manufacturing processes and material selection for biomimetic actuator systems.
Manufacturing industries are increasingly adopting biomimetic flexible systems for automated assembly processes, particularly in electronics and automotive sectors. These applications demand actuators capable of handling delicate components while maintaining high-speed operation and repeatability. The trend toward miniaturization in consumer electronics has further amplified demand for micro-scale flexible actuators that can perform precise manipulation tasks in confined spaces.
Aerospace and defense sectors represent emerging high-value markets for biomimetic actuator integration. Unmanned aerial vehicles require adaptive wing structures that can optimize aerodynamic performance across varying flight conditions, while space exploration missions demand robotic systems capable of operating in extreme environments with minimal maintenance requirements. These applications prioritize reliability and autonomous adaptation capabilities over cost considerations.
The prosthetics and assistive technology market demonstrates particularly strong growth potential, driven by advances in neural interface technologies and increasing healthcare accessibility. Modern prosthetic limbs incorporating biomimetic actuators can provide users with intuitive control and natural movement patterns, significantly improving quality of life outcomes. This market segment shows high tolerance for premium pricing given the transformative impact on user experience.
Consumer robotics applications, including service robots and entertainment systems, represent the fastest-growing demand segment. These applications require actuators that can safely interact with humans while providing engaging, lifelike movements. The market emphasizes cost-effectiveness and durability for mass-market adoption, driving innovation in manufacturing processes and material selection for biomimetic actuator systems.
Current State of Biomimetic Actuator Technologies
Biomimetic actuators have emerged as a transformative technology in robotics and automation, drawing inspiration from natural biological systems to achieve unprecedented levels of flexibility and adaptability. The field has witnessed significant advancement over the past decade, with researchers successfully translating mechanisms observed in muscle fibers, plant movements, and animal locomotion into engineered systems.
Current biomimetic actuator technologies encompass several distinct categories, each offering unique advantages for enhanced flexibility applications. Electroactive polymers (EAPs) represent one of the most mature technologies, utilizing ionic or electronic mechanisms to generate mechanical motion. Dielectric elastomer actuators (DEAs) have demonstrated remarkable strain capabilities exceeding 300%, making them particularly suitable for applications requiring large deformation ranges.
Shape memory alloy (SMA) actuators constitute another significant category, leveraging thermally-induced phase transitions to produce controlled mechanical responses. These systems excel in applications requiring high force output and precise positioning, though their response times remain limited by thermal dynamics. Recent developments have focused on improving actuation speed through advanced heating techniques and alloy compositions.
Pneumatic artificial muscles (PAMs) have gained considerable traction due to their inherent compliance and high power-to-weight ratios. McKibben-type actuators and pleated pneumatic artificial muscles demonstrate muscle-like contraction behaviors, enabling natural motion patterns in robotic systems. These technologies have found particular success in rehabilitation robotics and human-robot interaction applications.
Hydrogel-based actuators represent an emerging frontier, utilizing stimuli-responsive materials that undergo volumetric changes in response to environmental conditions such as pH, temperature, or electric fields. These systems offer exceptional biocompatibility and can operate in aquatic environments, expanding potential application domains.
The integration challenges currently facing biomimetic actuator technologies include control complexity, power consumption optimization, and scalability issues. Multi-actuator systems require sophisticated control algorithms to coordinate movements effectively, while maintaining the natural compliance that makes biomimetic approaches attractive. Manufacturing scalability remains a significant hurdle, with many advanced actuator designs requiring specialized fabrication processes that limit commercial viability.
Performance benchmarks vary significantly across different actuator types, with trade-offs between speed, force output, efficiency, and durability. Current systems typically achieve response times ranging from milliseconds to several seconds, depending on the underlying actuation mechanism and scale of operation.
Current biomimetic actuator technologies encompass several distinct categories, each offering unique advantages for enhanced flexibility applications. Electroactive polymers (EAPs) represent one of the most mature technologies, utilizing ionic or electronic mechanisms to generate mechanical motion. Dielectric elastomer actuators (DEAs) have demonstrated remarkable strain capabilities exceeding 300%, making them particularly suitable for applications requiring large deformation ranges.
Shape memory alloy (SMA) actuators constitute another significant category, leveraging thermally-induced phase transitions to produce controlled mechanical responses. These systems excel in applications requiring high force output and precise positioning, though their response times remain limited by thermal dynamics. Recent developments have focused on improving actuation speed through advanced heating techniques and alloy compositions.
Pneumatic artificial muscles (PAMs) have gained considerable traction due to their inherent compliance and high power-to-weight ratios. McKibben-type actuators and pleated pneumatic artificial muscles demonstrate muscle-like contraction behaviors, enabling natural motion patterns in robotic systems. These technologies have found particular success in rehabilitation robotics and human-robot interaction applications.
Hydrogel-based actuators represent an emerging frontier, utilizing stimuli-responsive materials that undergo volumetric changes in response to environmental conditions such as pH, temperature, or electric fields. These systems offer exceptional biocompatibility and can operate in aquatic environments, expanding potential application domains.
The integration challenges currently facing biomimetic actuator technologies include control complexity, power consumption optimization, and scalability issues. Multi-actuator systems require sophisticated control algorithms to coordinate movements effectively, while maintaining the natural compliance that makes biomimetic approaches attractive. Manufacturing scalability remains a significant hurdle, with many advanced actuator designs requiring specialized fabrication processes that limit commercial viability.
Performance benchmarks vary significantly across different actuator types, with trade-offs between speed, force output, efficiency, and durability. Current systems typically achieve response times ranging from milliseconds to several seconds, depending on the underlying actuation mechanism and scale of operation.
Existing Biomimetic Actuator Integration Solutions
01 Electroactive polymer-based actuators for enhanced flexibility
Biomimetic actuators can utilize electroactive polymers that respond to electrical stimulation to achieve flexible movement. These materials can undergo significant deformation when subjected to electric fields, enabling the creation of soft, compliant actuators that mimic natural muscle behavior. The polymers can be configured in various geometries to optimize flexibility and range of motion while maintaining structural integrity.- Soft material-based biomimetic actuators: Biomimetic actuators can be constructed using soft, flexible materials such as elastomers, hydrogels, and polymers to mimic the flexibility and compliance of biological tissues. These materials allow for large deformations and smooth movements, enabling the actuators to adapt to complex environments and perform delicate tasks. The use of soft materials enhances the flexibility and safety of the actuators in human-robot interaction scenarios.
- Electroactive polymer actuators: Electroactive polymers can be utilized in biomimetic actuators to achieve flexible actuation through electrical stimulation. These polymers change shape or size when an electric field is applied, providing controllable and reversible deformation. This technology enables the development of lightweight and compact actuators with high flexibility and energy efficiency, suitable for applications requiring precise motion control.
- Pneumatic and hydraulic flexible actuators: Pneumatic and hydraulic systems can be employed to create flexible biomimetic actuators that operate through fluid pressure. These actuators can achieve significant bending and extension movements while maintaining structural flexibility. The use of pressurized fluids allows for smooth and continuous motion, making them suitable for applications requiring high force output and adaptable movement patterns.
- Shape memory alloy-based flexible actuators: Shape memory alloys can be integrated into biomimetic actuators to provide flexibility and controllable actuation through thermal or stress-induced phase transformations. These materials can return to a predetermined shape when activated, enabling reversible and repeatable movements. The incorporation of shape memory alloys allows for compact designs with high power-to-weight ratios and excellent flexibility characteristics.
- Multi-segment and modular flexible actuator designs: Biomimetic actuators can be designed with multiple segments or modular components to enhance flexibility and range of motion. These designs allow for independent control of different sections, enabling complex movements that mimic biological organisms. The modular approach facilitates customization and scalability, making the actuators adaptable to various applications requiring different degrees of flexibility and motion capabilities.
02 Shape memory alloy integration for adaptive flexibility
Shape memory alloys can be incorporated into biomimetic actuator designs to provide adaptive flexibility through temperature-induced phase transformations. These materials can be programmed to return to predetermined shapes when activated, allowing for controlled and reversible deformation. The integration of such alloys enables actuators to achieve complex motion patterns while maintaining lightweight and compact form factors.Expand Specific Solutions03 Soft robotics structures with variable stiffness control
Biomimetic actuators can employ soft robotic structures that allow for variable stiffness control to enhance flexibility. These systems can dynamically adjust their mechanical properties through pneumatic, hydraulic, or other actuation mechanisms. The ability to modulate stiffness enables the actuator to adapt to different tasks and environments while maintaining safe interaction capabilities.Expand Specific Solutions04 Fiber-reinforced composite architectures for directional flexibility
Composite materials with embedded fiber reinforcements can be designed to provide directional flexibility in biomimetic actuators. The strategic placement and orientation of fibers allows for anisotropic mechanical properties, enabling preferential bending and deformation in specific directions. This approach mimics the hierarchical structure found in biological systems and provides enhanced control over actuator movement patterns.Expand Specific Solutions05 Hydrogel-based actuators for bio-inspired flexibility
Hydrogel materials can be utilized in biomimetic actuators to achieve bio-inspired flexibility through responsive swelling and contraction mechanisms. These materials can respond to various stimuli including pH, temperature, or chemical signals to produce controlled deformation. The high water content and soft nature of hydrogels enable the creation of actuators with mechanical properties closely matching biological tissues.Expand Specific Solutions
Key Players in Biomimetic Actuator Industry
The biomimetic actuator integration field represents an emerging technology sector in early development stages, characterized by significant research activity but limited commercial maturity. The market remains nascent with substantial growth potential as applications span robotics, medical devices, and aerospace systems. Technology maturity varies considerably across the competitive landscape, with leading research institutions like Harvard College, MIT, and Cornell University driving fundamental innovations in soft robotics and bio-inspired mechanisms. Commercial players including Globus Medical, Beijing Soft Robot Technology, and SRI International are advancing practical applications, while specialized firms like Exoiq GmbH and OtoJig GmbH focus on niche implementations. The sector exhibits strong academic-industry collaboration, particularly evident in partnerships between universities such as Zhejiang University, Hong Kong Polytechnic University, and Yale University with technology companies, indicating a transition from laboratory research toward commercial viability in specialized applications.
President & Fellows of Harvard College
Technical Solution: Harvard has developed advanced biomimetic actuators inspired by natural muscle systems, particularly focusing on soft pneumatic actuators that mimic octopus tentacles and elephant trunks. Their research emphasizes electroactive polymers (EAPs) and shape memory alloys (SMAs) for creating flexible, lightweight actuators. The university's Wyss Institute has pioneered soft robotics applications using pneumatic networks (PneuNets) that enable complex bending and grasping motions. These actuators demonstrate remarkable flexibility with up to 270-degree bending angles while maintaining structural integrity. Harvard's biomimetic approach integrates multiple actuation principles including hydraulic amplification and distributed sensing capabilities for enhanced control precision.
Strengths: Leading research institution with extensive funding and interdisciplinary expertise. Weaknesses: Limited commercial scalability and high manufacturing costs for complex designs.
Massachusetts Institute of Technology
Technical Solution: MIT has developed innovative biomimetic actuators based on artificial muscle fibers using twisted and coiled polymer actuators (TCPAs). Their research focuses on creating high-performance actuators that mimic natural muscle contraction mechanisms, achieving stress levels comparable to human skeletal muscle. The institute's approach integrates carbon nanotube yarns and shape memory polymers to create actuators with exceptional power-to-weight ratios. MIT's biomimetic systems incorporate distributed sensing and adaptive control algorithms that enable real-time flexibility adjustment. Their actuators demonstrate superior energy efficiency and can operate across wide temperature ranges while maintaining consistent performance characteristics.
Strengths: Strong engineering capabilities and advanced materials research infrastructure. Weaknesses: Complex manufacturing processes and limited durability under continuous operation cycles.
Core Patents in Flexible Biomimetic Actuation
Biomimetic actuation device and system, and methods for controlling a biomimetic actuation device and system
PatentActiveUS20160346449A1
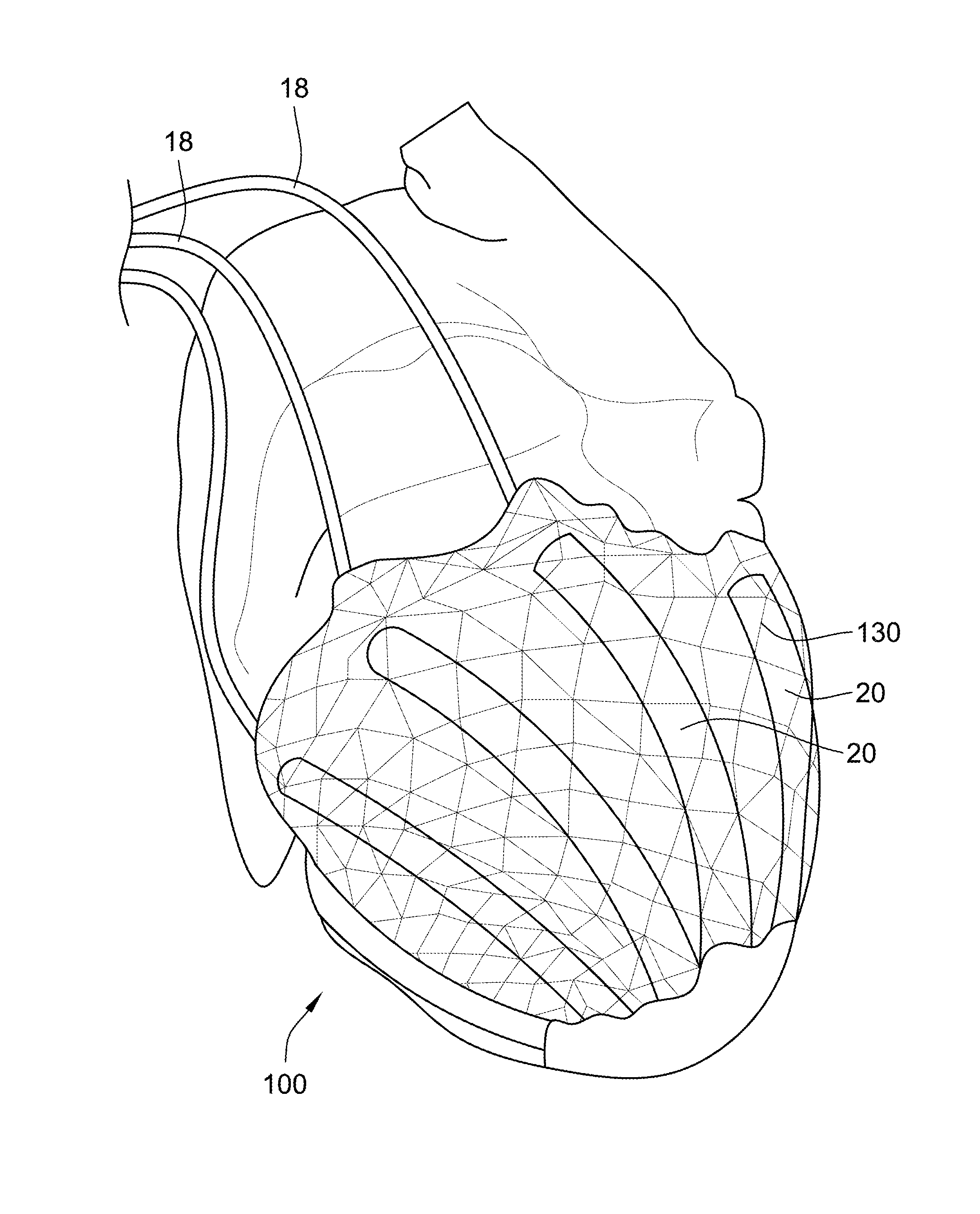
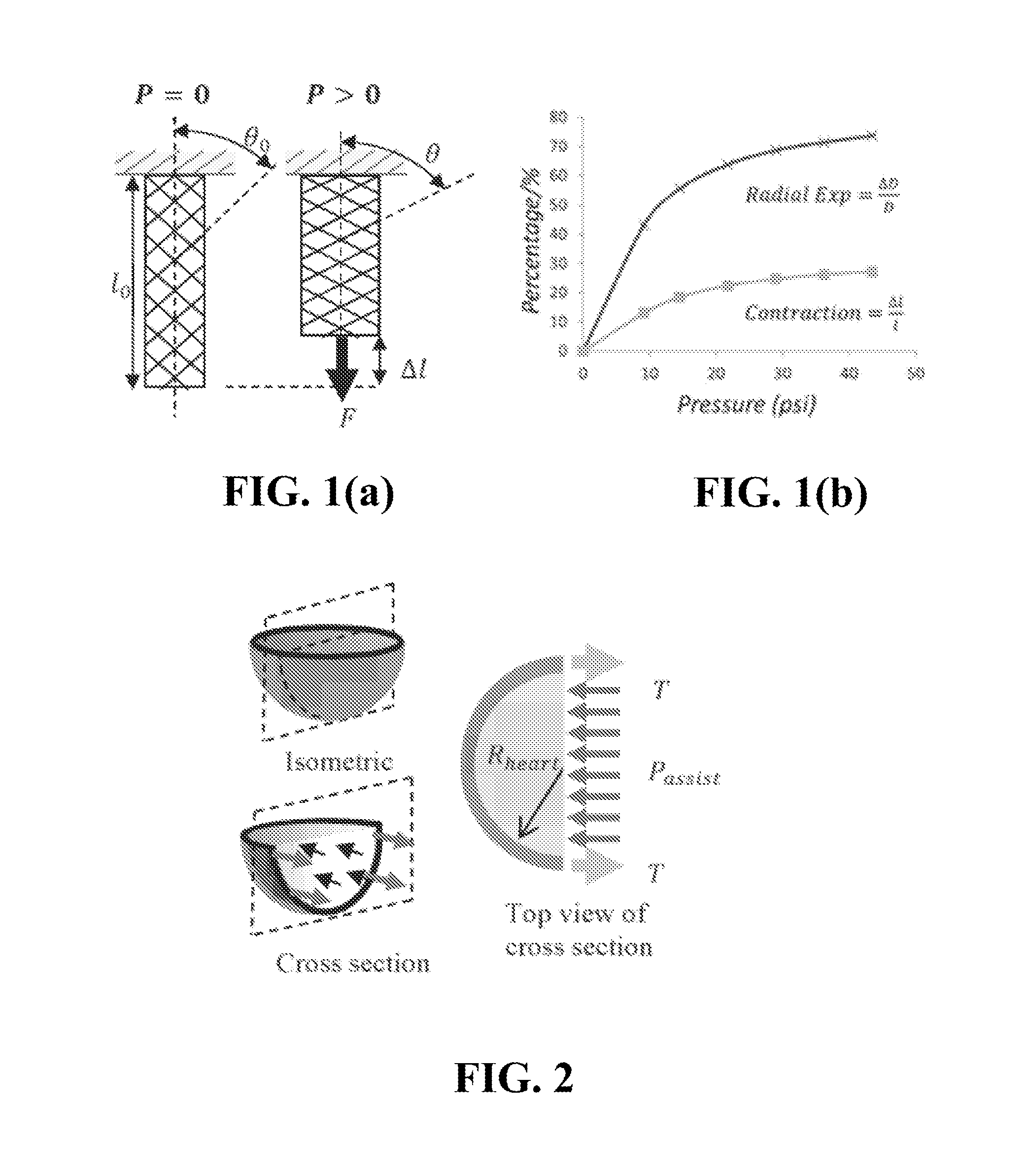
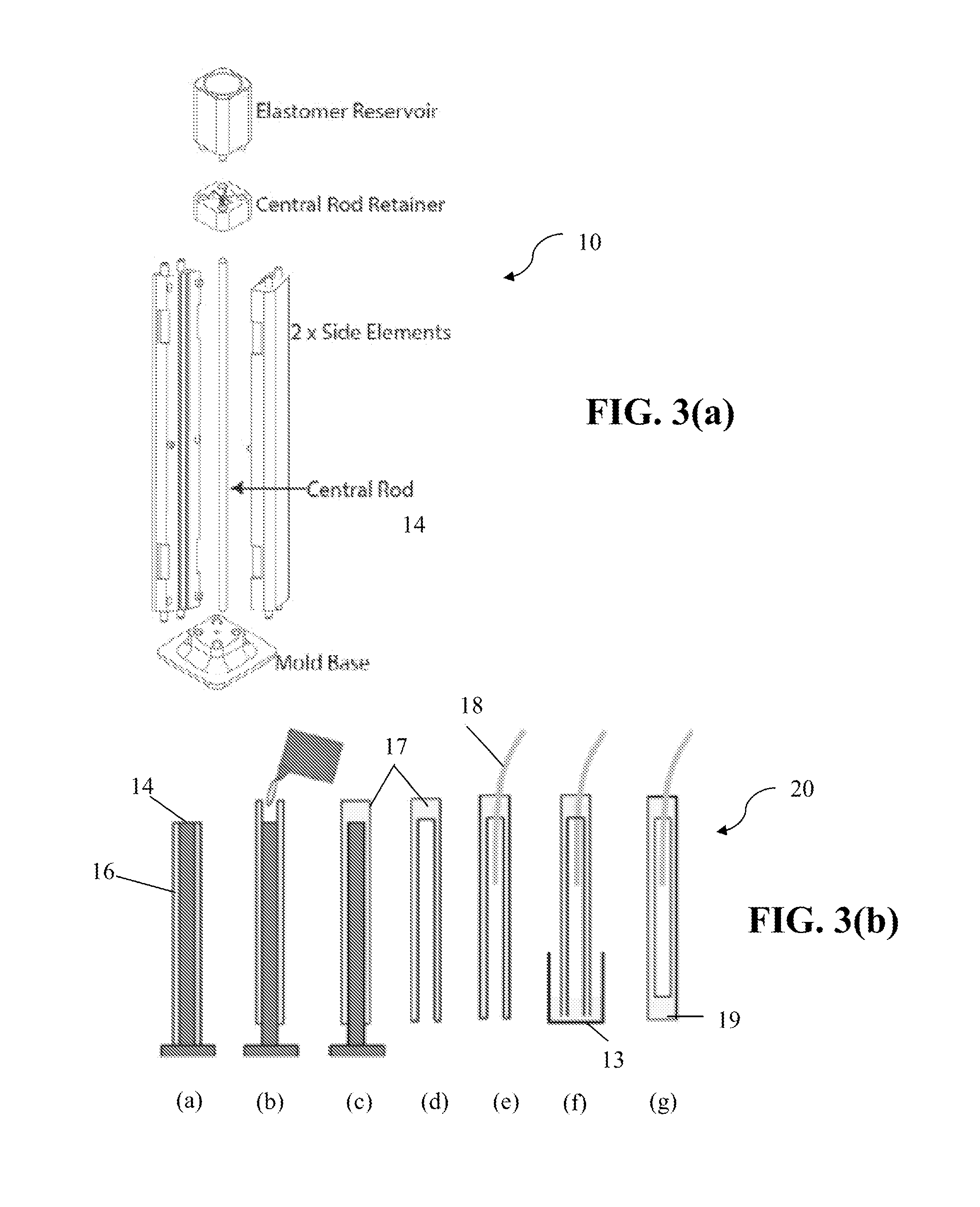
Innovation
- Development of biomimetic DCC devices using soft pneumatic artificial muscles (PAMs) with low threshold pressures and soft ends, oriented in a helical and circumferential fashion to replicate cardiac motion, providing synchronized mechanical assistance during both systolic and diastolic phases without contacting blood, thus reducing the need for anticoagulation and minimizing trauma.

Material Science Advances for Actuator Integration
The integration of biomimetic actuators for enhanced flexibility has been significantly advanced through breakthrough developments in material science, particularly in the realm of smart materials and novel composite structures. Shape memory alloys, electroactive polymers, and liquid crystal elastomers have emerged as foundational materials that enable actuators to mimic the sophisticated movement patterns observed in biological systems. These materials exhibit unique properties such as reversible deformation, high energy density, and programmable response characteristics that are essential for creating flexible actuator systems.
Recent advances in nanocomposite materials have revolutionized actuator performance by incorporating carbon nanotubes, graphene, and metallic nanoparticles into polymer matrices. These hybrid materials demonstrate enhanced electrical conductivity, mechanical strength, and thermal stability while maintaining the flexibility required for biomimetic applications. The development of hierarchical structures that replicate the multi-scale organization found in natural systems has enabled actuators to achieve both macro-scale movements and micro-scale precision control.
Hydrogel-based actuator materials represent another significant advancement, offering biocompatibility and the ability to operate in aqueous environments similar to biological systems. These materials can undergo substantial volume changes in response to various stimuli including pH, temperature, and electric fields. Advanced cross-linking techniques and the incorporation of conductive fillers have improved their response speed and mechanical durability, making them viable for practical applications.
The development of self-healing materials has addressed one of the critical challenges in actuator integration by providing autonomous repair capabilities that extend operational lifespan. These materials incorporate microcapsules containing healing agents or utilize reversible chemical bonds that can reform after mechanical damage. This advancement is particularly crucial for biomimetic actuators that must maintain functionality under repeated stress cycles.
Manufacturing innovations including 3D printing with functional materials, molecular-level assembly techniques, and bio-inspired fabrication processes have enabled the creation of complex actuator geometries that were previously impossible to achieve. These manufacturing advances allow for the precise control of material distribution and the integration of multiple functional materials within a single actuator structure, enabling more sophisticated biomimetic behaviors and enhanced overall system flexibility.
Recent advances in nanocomposite materials have revolutionized actuator performance by incorporating carbon nanotubes, graphene, and metallic nanoparticles into polymer matrices. These hybrid materials demonstrate enhanced electrical conductivity, mechanical strength, and thermal stability while maintaining the flexibility required for biomimetic applications. The development of hierarchical structures that replicate the multi-scale organization found in natural systems has enabled actuators to achieve both macro-scale movements and micro-scale precision control.
Hydrogel-based actuator materials represent another significant advancement, offering biocompatibility and the ability to operate in aqueous environments similar to biological systems. These materials can undergo substantial volume changes in response to various stimuli including pH, temperature, and electric fields. Advanced cross-linking techniques and the incorporation of conductive fillers have improved their response speed and mechanical durability, making them viable for practical applications.
The development of self-healing materials has addressed one of the critical challenges in actuator integration by providing autonomous repair capabilities that extend operational lifespan. These materials incorporate microcapsules containing healing agents or utilize reversible chemical bonds that can reform after mechanical damage. This advancement is particularly crucial for biomimetic actuators that must maintain functionality under repeated stress cycles.
Manufacturing innovations including 3D printing with functional materials, molecular-level assembly techniques, and bio-inspired fabrication processes have enabled the creation of complex actuator geometries that were previously impossible to achieve. These manufacturing advances allow for the precise control of material distribution and the integration of multiple functional materials within a single actuator structure, enabling more sophisticated biomimetic behaviors and enhanced overall system flexibility.
Bio-Safety Standards for Biomimetic Devices
The integration of biomimetic actuators in flexible systems necessitates comprehensive bio-safety standards to ensure human health protection and environmental compatibility. Current regulatory frameworks primarily address traditional mechanical devices, creating significant gaps in biomimetic technology oversight. The unique characteristics of bio-inspired actuators, including their organic material components and biological interaction mechanisms, require specialized safety protocols that extend beyond conventional device regulations.
Material biocompatibility represents a fundamental safety consideration for biomimetic actuators. These devices often incorporate biological polymers, protein-based materials, and bio-derived compounds that may trigger immune responses or allergic reactions. Established standards such as ISO 10993 series provide baseline biocompatibility testing protocols, yet biomimetic materials require enhanced evaluation procedures addressing long-term biological stability and degradation byproduct safety.
Contamination control protocols must address the unique challenges posed by biomimetic actuators' organic components. Unlike traditional synthetic materials, bio-inspired materials may support microbial growth or undergo biological degradation under specific environmental conditions. Safety standards should mandate sterility maintenance procedures, antimicrobial treatment protocols, and regular contamination monitoring throughout the device lifecycle.
Electromagnetic compatibility and biological interference standards require adaptation for biomimetic systems. These actuators may generate bioelectric signals or respond to biological electromagnetic fields in ways that could interfere with medical devices or biological processes. Safety protocols must establish acceptable electromagnetic emission limits and shielding requirements specific to biomimetic actuator applications.
Environmental safety standards must address the disposal and degradation of biomimetic materials. Unlike conventional synthetic components, bio-inspired materials may interact unpredictably with natural ecosystems upon disposal. Comprehensive environmental impact assessments should evaluate biodegradation pathways, potential ecological disruption, and appropriate disposal methodologies.
Risk assessment frameworks for biomimetic actuators should incorporate failure mode analysis specific to biological systems. Traditional mechanical failure modes may not adequately represent the complex failure mechanisms possible in bio-inspired systems, including biological degradation, immune system interactions, and adaptive biological responses that could compromise device functionality or safety.
Material biocompatibility represents a fundamental safety consideration for biomimetic actuators. These devices often incorporate biological polymers, protein-based materials, and bio-derived compounds that may trigger immune responses or allergic reactions. Established standards such as ISO 10993 series provide baseline biocompatibility testing protocols, yet biomimetic materials require enhanced evaluation procedures addressing long-term biological stability and degradation byproduct safety.
Contamination control protocols must address the unique challenges posed by biomimetic actuators' organic components. Unlike traditional synthetic materials, bio-inspired materials may support microbial growth or undergo biological degradation under specific environmental conditions. Safety standards should mandate sterility maintenance procedures, antimicrobial treatment protocols, and regular contamination monitoring throughout the device lifecycle.
Electromagnetic compatibility and biological interference standards require adaptation for biomimetic systems. These actuators may generate bioelectric signals or respond to biological electromagnetic fields in ways that could interfere with medical devices or biological processes. Safety protocols must establish acceptable electromagnetic emission limits and shielding requirements specific to biomimetic actuator applications.
Environmental safety standards must address the disposal and degradation of biomimetic materials. Unlike conventional synthetic components, bio-inspired materials may interact unpredictably with natural ecosystems upon disposal. Comprehensive environmental impact assessments should evaluate biodegradation pathways, potential ecological disruption, and appropriate disposal methodologies.
Risk assessment frameworks for biomimetic actuators should incorporate failure mode analysis specific to biological systems. Traditional mechanical failure modes may not adequately represent the complex failure mechanisms possible in bio-inspired systems, including biological degradation, immune system interactions, and adaptive biological responses that could compromise device functionality or safety.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!