

Optimize Robot Skin for Low-Temperature Environments
APR 17, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Robot Skin Cold Environment Tech Background and Goals
Robot skin technology has emerged as a critical component in the advancement of humanoid robotics and tactile sensing systems over the past two decades. The development trajectory began with basic pressure-sensitive materials in the early 2000s and has evolved into sophisticated multi-modal sensing platforms capable of detecting pressure, temperature, texture, and proximity. This evolution reflects the growing demand for robots that can safely and effectively interact with humans and operate in diverse environmental conditions.
The fundamental challenge of creating artificial skin lies in replicating the remarkable capabilities of human skin, which contains approximately 17,000 mechanoreceptors per hand and can detect pressure variations as small as 0.1 grams. Early implementations focused primarily on room-temperature applications, utilizing materials such as conductive polymers, piezoresistive films, and capacitive sensing arrays. However, as robotic applications expanded into extreme environments, the limitations of these conventional approaches became apparent.
Low-temperature environments present unique challenges that significantly impact robot skin performance. Temperature variations affect material properties, sensor sensitivity, and signal transmission characteristics. Conventional flexible electronics and sensing materials often exhibit reduced conductivity, increased brittleness, and altered mechanical properties when exposed to sub-zero conditions. These limitations restrict robotic deployment in applications such as arctic exploration, space missions, cold storage facilities, and outdoor winter operations.
The primary technical objectives for optimizing robot skin in cold environments encompass several critical areas. Material stability represents a fundamental goal, requiring the development of sensing substrates that maintain flexibility and conductivity across wide temperature ranges, typically from -40°C to +60°C. Signal integrity preservation is equally important, as temperature-induced changes in electrical properties can lead to sensor drift and reduced measurement accuracy.
Mechanical robustness constitutes another essential objective, as materials must resist cracking, delamination, and fatigue under thermal cycling conditions. The skin must maintain its tactile sensing capabilities while withstanding repeated expansion and contraction cycles without performance degradation. Additionally, response time optimization becomes crucial in cold environments, where slower molecular motion can impact sensor reaction speeds.
Energy efficiency optimization represents a strategic goal, as cold temperatures typically increase power consumption in electronic systems. Developing low-power sensing architectures and implementing intelligent power management strategies can extend operational duration in remote cold environments where battery replacement is challenging.
The integration of thermal management capabilities into robot skin design has emerged as an advanced objective. This includes incorporating heating elements for critical sensor areas, implementing thermal isolation strategies, and developing adaptive sensing algorithms that compensate for temperature-related performance variations. These enhancements enable consistent tactile feedback regardless of environmental conditions, supporting reliable robotic operation in challenging cold-weather scenarios.
The fundamental challenge of creating artificial skin lies in replicating the remarkable capabilities of human skin, which contains approximately 17,000 mechanoreceptors per hand and can detect pressure variations as small as 0.1 grams. Early implementations focused primarily on room-temperature applications, utilizing materials such as conductive polymers, piezoresistive films, and capacitive sensing arrays. However, as robotic applications expanded into extreme environments, the limitations of these conventional approaches became apparent.
Low-temperature environments present unique challenges that significantly impact robot skin performance. Temperature variations affect material properties, sensor sensitivity, and signal transmission characteristics. Conventional flexible electronics and sensing materials often exhibit reduced conductivity, increased brittleness, and altered mechanical properties when exposed to sub-zero conditions. These limitations restrict robotic deployment in applications such as arctic exploration, space missions, cold storage facilities, and outdoor winter operations.
The primary technical objectives for optimizing robot skin in cold environments encompass several critical areas. Material stability represents a fundamental goal, requiring the development of sensing substrates that maintain flexibility and conductivity across wide temperature ranges, typically from -40°C to +60°C. Signal integrity preservation is equally important, as temperature-induced changes in electrical properties can lead to sensor drift and reduced measurement accuracy.
Mechanical robustness constitutes another essential objective, as materials must resist cracking, delamination, and fatigue under thermal cycling conditions. The skin must maintain its tactile sensing capabilities while withstanding repeated expansion and contraction cycles without performance degradation. Additionally, response time optimization becomes crucial in cold environments, where slower molecular motion can impact sensor reaction speeds.
Energy efficiency optimization represents a strategic goal, as cold temperatures typically increase power consumption in electronic systems. Developing low-power sensing architectures and implementing intelligent power management strategies can extend operational duration in remote cold environments where battery replacement is challenging.
The integration of thermal management capabilities into robot skin design has emerged as an advanced objective. This includes incorporating heating elements for critical sensor areas, implementing thermal isolation strategies, and developing adaptive sensing algorithms that compensate for temperature-related performance variations. These enhancements enable consistent tactile feedback regardless of environmental conditions, supporting reliable robotic operation in challenging cold-weather scenarios.
Market Demand for Cold-Resistant Robotic Applications
The global robotics market is experiencing unprecedented growth in cold-climate applications, driven by increasing automation needs in harsh environments where human operation becomes challenging or dangerous. Industries operating in sub-zero temperatures are actively seeking robotic solutions that can maintain functionality and reliability under extreme thermal conditions.
Arctic oil and gas exploration represents one of the most significant market drivers for cold-resistant robotics. Offshore drilling platforms and pipeline inspection operations in regions like Alaska, Siberia, and the North Sea require autonomous systems capable of continuous operation in temperatures reaching minus forty degrees Celsius. These applications demand robots with specialized skin materials that maintain flexibility and sensor functionality despite thermal stress.
The space exploration sector presents another substantial market opportunity, particularly with renewed interest in lunar and Martian missions. Space agencies and private aerospace companies require robotic systems capable of operating on planetary surfaces where temperatures can plummet to minus one hundred degrees Celsius. The robotic skin must withstand not only extreme cold but also thermal cycling between extreme temperatures.
Cold storage and food processing industries are increasingly adopting robotic automation to improve efficiency and reduce human exposure to freezing environments. Automated warehouses, meat processing facilities, and pharmaceutical cold chain operations require robots that can function reliably in controlled low-temperature environments ranging from minus twenty to minus eighty degrees Celsius.
Military and defense applications in polar regions create additional demand for cold-resistant robotic systems. Border patrol, surveillance, and logistics operations in arctic territories require unmanned systems with robust performance characteristics in extreme weather conditions.
The renewable energy sector, particularly wind farm maintenance in cold climates, represents an emerging market segment. Inspection and maintenance robots for offshore wind installations must operate effectively in harsh marine environments with freezing temperatures and high humidity.
Market growth is further accelerated by technological convergence trends, including advances in artificial intelligence, sensor miniaturization, and materials science. These developments enable more sophisticated robotic applications in previously inaccessible cold environments, expanding the total addressable market significantly.
Regional demand patterns show strong growth in northern hemisphere markets, including Scandinavia, Canada, Russia, and northern United States, where industrial activities in cold environments are most prevalent. Emerging markets in Antarctica research and deep-sea exploration also contribute to expanding demand for specialized cold-resistant robotic solutions.
Arctic oil and gas exploration represents one of the most significant market drivers for cold-resistant robotics. Offshore drilling platforms and pipeline inspection operations in regions like Alaska, Siberia, and the North Sea require autonomous systems capable of continuous operation in temperatures reaching minus forty degrees Celsius. These applications demand robots with specialized skin materials that maintain flexibility and sensor functionality despite thermal stress.
The space exploration sector presents another substantial market opportunity, particularly with renewed interest in lunar and Martian missions. Space agencies and private aerospace companies require robotic systems capable of operating on planetary surfaces where temperatures can plummet to minus one hundred degrees Celsius. The robotic skin must withstand not only extreme cold but also thermal cycling between extreme temperatures.
Cold storage and food processing industries are increasingly adopting robotic automation to improve efficiency and reduce human exposure to freezing environments. Automated warehouses, meat processing facilities, and pharmaceutical cold chain operations require robots that can function reliably in controlled low-temperature environments ranging from minus twenty to minus eighty degrees Celsius.
Military and defense applications in polar regions create additional demand for cold-resistant robotic systems. Border patrol, surveillance, and logistics operations in arctic territories require unmanned systems with robust performance characteristics in extreme weather conditions.
The renewable energy sector, particularly wind farm maintenance in cold climates, represents an emerging market segment. Inspection and maintenance robots for offshore wind installations must operate effectively in harsh marine environments with freezing temperatures and high humidity.
Market growth is further accelerated by technological convergence trends, including advances in artificial intelligence, sensor miniaturization, and materials science. These developments enable more sophisticated robotic applications in previously inaccessible cold environments, expanding the total addressable market significantly.
Regional demand patterns show strong growth in northern hemisphere markets, including Scandinavia, Canada, Russia, and northern United States, where industrial activities in cold environments are most prevalent. Emerging markets in Antarctica research and deep-sea exploration also contribute to expanding demand for specialized cold-resistant robotic solutions.
Current State and Challenges of Robot Skin in Low Temps
Robot skin technology has achieved significant progress in recent years, with various materials and sensing mechanisms being developed for tactile perception and environmental interaction. Current implementations primarily utilize flexible polymers, conductive elastomers, and multi-layered composite structures that integrate pressure, temperature, and proximity sensors. These systems typically operate effectively within standard temperature ranges of 0°C to 60°C, providing adequate sensitivity and response times for most robotic applications.
However, the performance of existing robot skin technologies degrades substantially when exposed to low-temperature environments below -20°C. Material brittleness becomes a critical issue as polymer-based substrates lose their flexibility and elasticity, leading to reduced conformability and potential cracking under mechanical stress. The temperature coefficient of resistance in conductive materials causes significant drift in sensor readings, compromising measurement accuracy and reliability.
Sensor integration presents another major challenge in cold conditions. Traditional capacitive and resistive sensing elements experience altered electrical properties due to temperature-dependent material characteristics. Signal processing circuits may suffer from increased noise levels and reduced signal-to-noise ratios, while adhesive interfaces between different material layers often fail due to thermal expansion mismatches and reduced bonding strength at low temperatures.
Power consumption emerges as a significant constraint in low-temperature robot skin applications. Cold environments typically increase the electrical resistance of conductive pathways, requiring higher driving voltages to maintain sensor functionality. Battery performance also deteriorates in cold conditions, limiting the operational duration of wireless sensor nodes embedded within the skin structure.
Manufacturing and deployment challenges further complicate the development of cold-resistant robot skin. Standard fabrication processes may not be suitable for materials that maintain flexibility at low temperatures, requiring specialized equipment and modified production techniques. Field deployment in harsh environments demands robust packaging solutions that protect sensitive electronic components while maintaining the skin's tactile sensing capabilities.
Current research efforts focus on developing new material formulations, including cold-resistant polymers and temperature-stable conductive composites. However, these solutions often involve trade-offs between low-temperature performance and other critical properties such as sensitivity, durability, and cost-effectiveness. The lack of standardized testing protocols for low-temperature robot skin performance also hinders systematic evaluation and comparison of different technological approaches.
However, the performance of existing robot skin technologies degrades substantially when exposed to low-temperature environments below -20°C. Material brittleness becomes a critical issue as polymer-based substrates lose their flexibility and elasticity, leading to reduced conformability and potential cracking under mechanical stress. The temperature coefficient of resistance in conductive materials causes significant drift in sensor readings, compromising measurement accuracy and reliability.
Sensor integration presents another major challenge in cold conditions. Traditional capacitive and resistive sensing elements experience altered electrical properties due to temperature-dependent material characteristics. Signal processing circuits may suffer from increased noise levels and reduced signal-to-noise ratios, while adhesive interfaces between different material layers often fail due to thermal expansion mismatches and reduced bonding strength at low temperatures.
Power consumption emerges as a significant constraint in low-temperature robot skin applications. Cold environments typically increase the electrical resistance of conductive pathways, requiring higher driving voltages to maintain sensor functionality. Battery performance also deteriorates in cold conditions, limiting the operational duration of wireless sensor nodes embedded within the skin structure.
Manufacturing and deployment challenges further complicate the development of cold-resistant robot skin. Standard fabrication processes may not be suitable for materials that maintain flexibility at low temperatures, requiring specialized equipment and modified production techniques. Field deployment in harsh environments demands robust packaging solutions that protect sensitive electronic components while maintaining the skin's tactile sensing capabilities.
Current research efforts focus on developing new material formulations, including cold-resistant polymers and temperature-stable conductive composites. However, these solutions often involve trade-offs between low-temperature performance and other critical properties such as sensitivity, durability, and cost-effectiveness. The lack of standardized testing protocols for low-temperature robot skin performance also hinders systematic evaluation and comparison of different technological approaches.
Existing Solutions for Low-Temperature Robot Skin
01 Tactile sensing and pressure detection in robot skin
Robot skin can be equipped with tactile sensing capabilities to detect pressure, force, and touch. These systems typically incorporate pressure sensors, strain gauges, or capacitive sensing elements that allow robots to perceive physical contact and interaction with their environment. The sensing mechanisms enable robots to adjust their grip strength, detect collisions, and respond appropriately to external stimuli, making them safer and more effective in human-robot interaction scenarios.- Tactile sensing and pressure detection in robot skin: Robot skin can be equipped with tactile sensing capabilities to detect pressure, force, and touch. These systems typically incorporate pressure sensors, strain gauges, or capacitive sensing elements that enable robots to perceive physical contact and measure applied forces. The sensing mechanisms allow robots to interact safely with their environment and respond appropriately to external stimuli. Advanced implementations may include multi-point pressure detection and distributed sensor arrays for comprehensive tactile feedback.
- Flexible and stretchable materials for robot skin: The development of robot skin utilizes flexible and stretchable materials that can conform to various robot body shapes and withstand mechanical deformation. These materials include elastomers, silicone-based compounds, and polymer composites that maintain functionality during bending, stretching, and compression. The flexible substrate allows the robot skin to be applied to curved surfaces and moving joints while maintaining sensor performance and durability. Material selection focuses on achieving both mechanical flexibility and reliable electronic performance.
- Multi-modal sensing integration: Robot skin systems integrate multiple sensing modalities to provide comprehensive environmental perception. These systems combine various sensor types including temperature sensors, proximity sensors, and tactile sensors within a single skin structure. The integration enables robots to simultaneously detect multiple physical parameters such as temperature changes, object proximity, contact pressure, and surface texture. Multi-modal sensing enhances robot perception capabilities and enables more sophisticated interaction with the environment.
- Signal processing and data acquisition systems: Robot skin implementations include sophisticated signal processing and data acquisition systems to handle sensor outputs. These systems process signals from distributed sensor arrays, perform noise filtering, and convert analog sensor data into digital information for robot control systems. The processing architecture may include multiplexing circuits, analog-to-digital converters, and communication interfaces that enable real-time data transmission. Advanced implementations incorporate machine learning algorithms for pattern recognition and sensor fusion.
- Modular and scalable robot skin structures: Robot skin designs employ modular and scalable architectures that allow customization for different robot platforms and applications. These structures feature interconnected sensor modules that can be arranged in various configurations to cover different body areas. The modular approach facilitates maintenance, repair, and upgrades by enabling replacement of individual sections. Scalable designs accommodate robots of varying sizes and shapes while maintaining consistent sensing performance across the entire skin surface.
02 Flexible and stretchable materials for robot skin
The development of robot skin utilizes flexible and stretchable materials that can conform to various robot body shapes and withstand repeated deformation. These materials include elastomers, conductive polymers, and composite structures that maintain their sensing and protective functions while allowing natural movement. The flexible nature of these materials enables robots to have more human-like or animal-like outer surfaces that can adapt to different postures and movements without compromising functionality.Expand Specific Solutions03 Multi-modal sensing integration in robot skin
Advanced robot skin systems integrate multiple sensing modalities including temperature sensing, proximity detection, and tactile feedback into a single unified interface. This multi-modal approach allows robots to gather comprehensive information about their surroundings and interactions. The integration of various sensor types enables more sophisticated perception capabilities, allowing robots to distinguish between different types of contact, detect thermal changes, and sense nearby objects before physical contact occurs.Expand Specific Solutions04 Self-healing and protective properties of robot skin
Robot skin can be designed with self-healing capabilities and protective functions to enhance durability and longevity. These systems may incorporate materials that can automatically repair minor damage or provide protection against environmental factors such as moisture, dust, and mechanical wear. The protective layer serves as a barrier between sensitive internal components and external hazards while maintaining the necessary flexibility and sensing capabilities for robot operation.Expand Specific Solutions05 Manufacturing and structural design of robot skin
The manufacturing process and structural design of robot skin involve specialized fabrication techniques and layered architectures. These designs often feature multiple functional layers including substrate layers, sensing layers, and protective outer layers that work together to achieve desired performance characteristics. The structural configuration considers factors such as sensor placement, electrical connectivity, mechanical properties, and ease of installation on robotic platforms. Various manufacturing methods enable scalable production while maintaining consistent quality and performance.Expand Specific Solutions
Key Players in Cold Environment Robotics Industry
The robot skin optimization for low-temperature environments represents an emerging niche within the broader robotics industry, currently in its early development stage with significant growth potential driven by applications in harsh climate robotics and space exploration. The market remains relatively small but shows promising expansion as demand increases for robots operating in arctic conditions, cold storage facilities, and extraterrestrial missions. Technology maturity varies considerably across key players, with established research institutions like Zhejiang University, Harbin Institute of Technology, and The University of Hong Kong leading fundamental materials research, while specialized companies such as Tujian Technology focus on flexible tactile sensing solutions. Industrial giants like Seiko Epson and ABB AG contribute manufacturing expertise and integration capabilities. The competitive landscape features a mix of academic institutions driving innovation, emerging startups developing specialized materials, and established corporations providing commercialization pathways, indicating a technology sector transitioning from research-focused to application-ready solutions.
Zhejiang University
Technical Solution: Zhejiang University has pioneered research in bio-inspired robotic skin with enhanced cold-weather performance. Their approach utilizes graphene-enhanced conductive polymers and biomimetic surface textures that prevent ice formation while maintaining tactile sensitivity. The university has developed self-heating sensor networks with energy-efficient thermal regulation and advanced materials that exhibit minimal thermal expansion coefficients. Their research includes novel fabrication techniques for creating flexible, multi-modal sensing capabilities that remain functional in temperatures down to -30°C with integrated anti-freeze mechanisms.
Strengths: Innovative bio-inspired approaches, cutting-edge materials research, strong publication record. Weaknesses: Early-stage technology readiness, limited real-world testing in extreme conditions.
Seiko Epson Corp.
Technical Solution: Seiko Epson has leveraged their precision manufacturing expertise to develop miniaturized sensor arrays for robotic skin applications in cold environments. Their technology incorporates MEMS-based pressure and temperature sensors with specialized packaging that prevents moisture ingress and thermal shock damage. The company's solution features ultra-low power consumption designs, advanced signal conditioning circuits optimized for cold-weather operation, and proprietary encapsulation materials that maintain flexibility at low temperatures. Their manufacturing processes ensure high-yield production of reliable sensor networks suitable for commercial robotic applications.
Strengths: Manufacturing excellence, miniaturization expertise, commercial production capabilities. Weaknesses: Limited robotics market presence, focus more on component-level rather than system-level solutions.
Core Innovations in Cold-Resistant Robot Skin Materials
Dual-mode temperature regulation e-skin and preparation method therefor
PatentWO2025030979A1
Innovation
- Flexible thermoelectric devices and hygroscopic hydrogel composite materials are used, combined with foam layer, to achieve dual-mode temperature regulation, simulating the temperature regulation mechanism of the human body.




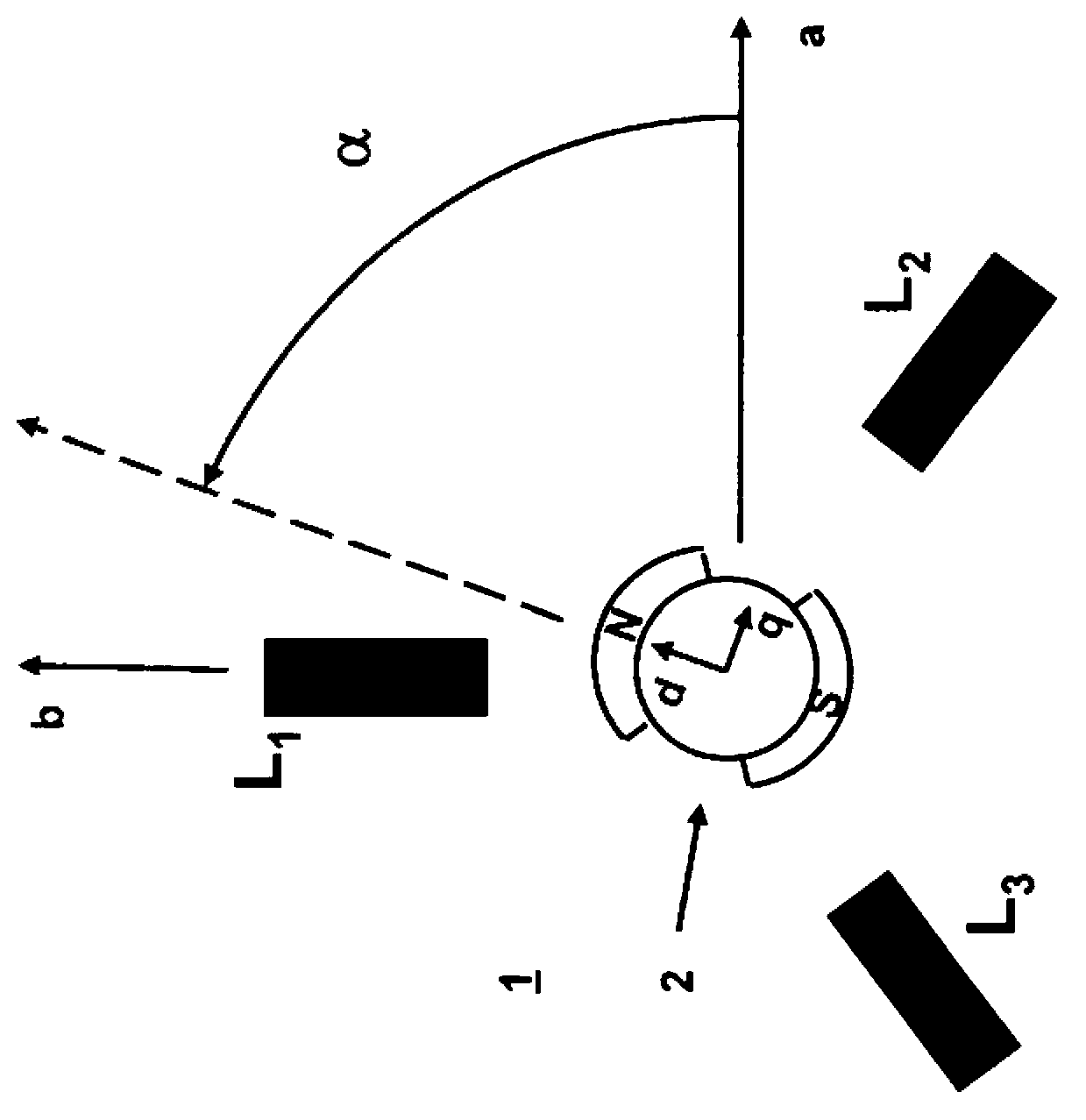
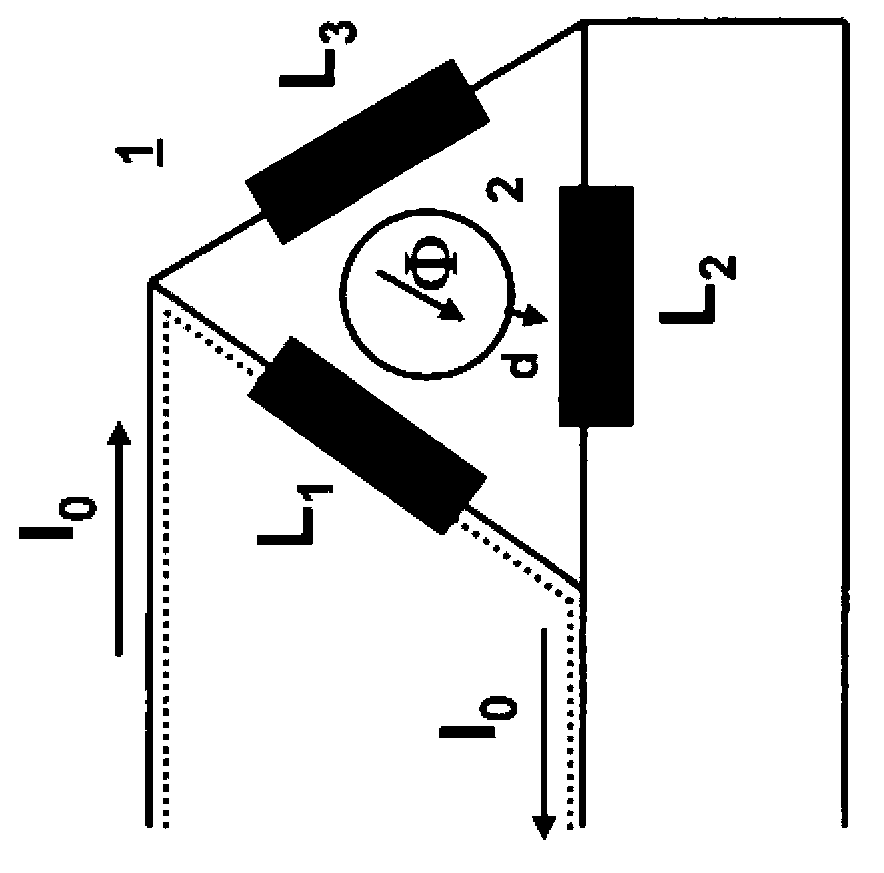
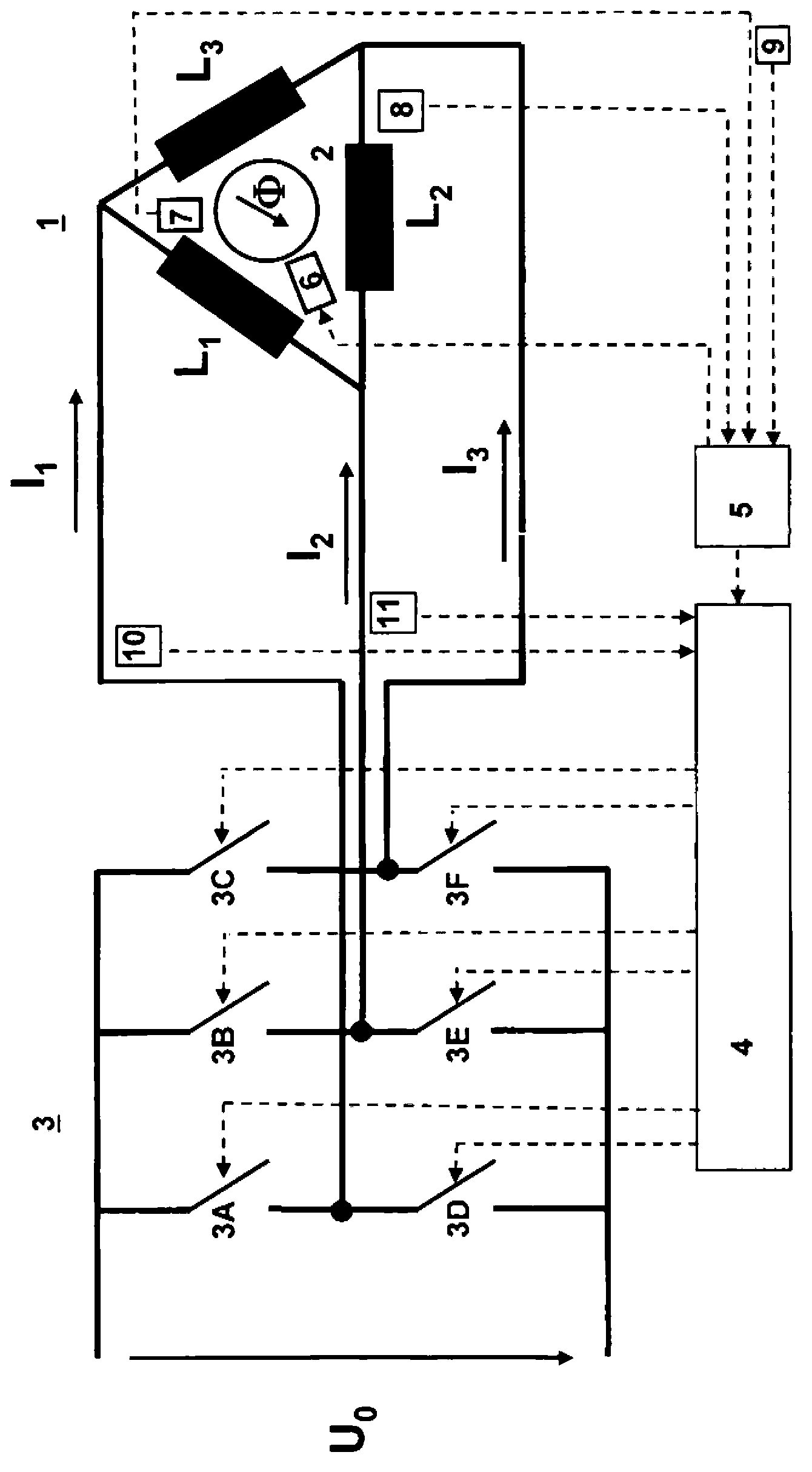
Method and system for heating of robots in cold environments
PatentActiveCN102741021A
Innovation
- A permanent magnet brushless or three-phase synchronous motor is used, and an inverter is used to apply directional magnetic flux in a static state to generate a DC current with a torque close to zero. The resistance loss is used to heat the drive train, and the monitoring unit monitors the temperature to avoid overheating.

Material Safety Standards for Extreme Environment Robotics
Material safety standards for extreme environment robotics represent a critical framework governing the deployment of robotic systems in harsh operational conditions. These standards encompass comprehensive guidelines for material selection, testing protocols, and performance validation specifically designed for robotics operating in temperature extremes, high radiation environments, corrosive atmospheres, and other challenging conditions. The regulatory landscape includes international standards such as ISO 8373 for robotics safety, IEC 60068 for environmental testing, and ASTM standards for material characterization under extreme conditions.
Current safety standards mandate rigorous material qualification processes that evaluate thermal cycling resistance, mechanical integrity at temperature extremes, and long-term stability under environmental stress. For low-temperature applications, materials must demonstrate compliance with standards including ASTM D746 for brittleness temperature testing, ISO 812 for rubber vulcanizates at low temperatures, and MIL-STD-810 for military equipment environmental requirements. These standards establish minimum performance thresholds for flexibility retention, impact resistance, and dimensional stability across operational temperature ranges.
Certification processes require extensive documentation of material properties, including glass transition temperatures, coefficient of thermal expansion, and fatigue resistance under cyclic loading. Testing protocols mandate accelerated aging studies, thermal shock assessments, and compatibility evaluations with other system components. Materials must maintain electrical insulation properties, prevent outgassing in vacuum conditions, and resist degradation from UV exposure or chemical contamination.
Emerging safety considerations address the integration of smart materials and embedded sensors within robotic skin systems. Standards are evolving to encompass biocompatibility requirements for human-robot interaction scenarios, electromagnetic compatibility for sensitive electronic components, and fail-safe mechanisms for material degradation detection. Compliance verification involves third-party testing laboratories and requires traceability documentation throughout the material supply chain.
The regulatory framework continues expanding to address novel material technologies including self-healing polymers, phase-change materials, and nanocomposite structures. Future standards development focuses on establishing performance metrics for adaptive materials, defining safety protocols for autonomous material property adjustment, and creating guidelines for predictive maintenance based on material condition monitoring in extreme operational environments.
Current safety standards mandate rigorous material qualification processes that evaluate thermal cycling resistance, mechanical integrity at temperature extremes, and long-term stability under environmental stress. For low-temperature applications, materials must demonstrate compliance with standards including ASTM D746 for brittleness temperature testing, ISO 812 for rubber vulcanizates at low temperatures, and MIL-STD-810 for military equipment environmental requirements. These standards establish minimum performance thresholds for flexibility retention, impact resistance, and dimensional stability across operational temperature ranges.
Certification processes require extensive documentation of material properties, including glass transition temperatures, coefficient of thermal expansion, and fatigue resistance under cyclic loading. Testing protocols mandate accelerated aging studies, thermal shock assessments, and compatibility evaluations with other system components. Materials must maintain electrical insulation properties, prevent outgassing in vacuum conditions, and resist degradation from UV exposure or chemical contamination.
Emerging safety considerations address the integration of smart materials and embedded sensors within robotic skin systems. Standards are evolving to encompass biocompatibility requirements for human-robot interaction scenarios, electromagnetic compatibility for sensitive electronic components, and fail-safe mechanisms for material degradation detection. Compliance verification involves third-party testing laboratories and requires traceability documentation throughout the material supply chain.
The regulatory framework continues expanding to address novel material technologies including self-healing polymers, phase-change materials, and nanocomposite structures. Future standards development focuses on establishing performance metrics for adaptive materials, defining safety protocols for autonomous material property adjustment, and creating guidelines for predictive maintenance based on material condition monitoring in extreme operational environments.
Energy Efficiency Considerations in Cold Robot Operations
Energy efficiency becomes a critical performance parameter when robots operate in low-temperature environments, as cold conditions significantly impact power consumption patterns and battery performance. The optimization of robot skin for such environments must carefully balance thermal management requirements with energy conservation strategies to ensure sustained operational capability.
Cold temperatures directly affect battery chemistry, reducing available capacity by 20-40% in typical lithium-ion systems when operating below -10°C. This capacity reduction necessitates more frequent charging cycles or larger battery packs, both of which impact overall system efficiency. Advanced robot skin designs incorporate thermal regulation layers that maintain battery compartments within optimal temperature ranges, utilizing phase-change materials or resistive heating elements with intelligent temperature control algorithms.
Power distribution efficiency suffers in cold environments due to increased electrical resistance in conductors and semiconductor components. Robot skin architectures must integrate low-resistance pathways and temperature-compensated power management circuits. Implementing distributed power architectures within the skin structure allows for localized heating of critical components while minimizing overall energy consumption through zone-based thermal management.
Actuator efficiency degradation represents another significant challenge, as servo motors and hydraulic systems experience increased friction and reduced fluid viscosity in cold conditions. Energy-efficient robot skin designs incorporate pre-heating systems for actuator housings, utilizing waste heat recovery from electronic components and implementing predictive heating algorithms that anticipate operational demands.
Thermal insulation strategies within robot skin must balance energy conservation with heat dissipation requirements. Multi-layer insulation systems with variable thermal conductivity properties enable dynamic thermal management, allowing heat retention during idle periods while facilitating cooling during high-performance operations. Aerogel-based insulation materials offer exceptional thermal resistance with minimal weight penalties.
Smart energy management algorithms integrated into robot skin systems optimize power allocation based on environmental conditions and operational requirements. These systems implement dynamic voltage scaling, selective component activation, and predictive thermal management to maximize operational duration while maintaining performance standards in challenging cold-weather scenarios.
Cold temperatures directly affect battery chemistry, reducing available capacity by 20-40% in typical lithium-ion systems when operating below -10°C. This capacity reduction necessitates more frequent charging cycles or larger battery packs, both of which impact overall system efficiency. Advanced robot skin designs incorporate thermal regulation layers that maintain battery compartments within optimal temperature ranges, utilizing phase-change materials or resistive heating elements with intelligent temperature control algorithms.
Power distribution efficiency suffers in cold environments due to increased electrical resistance in conductors and semiconductor components. Robot skin architectures must integrate low-resistance pathways and temperature-compensated power management circuits. Implementing distributed power architectures within the skin structure allows for localized heating of critical components while minimizing overall energy consumption through zone-based thermal management.
Actuator efficiency degradation represents another significant challenge, as servo motors and hydraulic systems experience increased friction and reduced fluid viscosity in cold conditions. Energy-efficient robot skin designs incorporate pre-heating systems for actuator housings, utilizing waste heat recovery from electronic components and implementing predictive heating algorithms that anticipate operational demands.
Thermal insulation strategies within robot skin must balance energy conservation with heat dissipation requirements. Multi-layer insulation systems with variable thermal conductivity properties enable dynamic thermal management, allowing heat retention during idle periods while facilitating cooling during high-performance operations. Aerogel-based insulation materials offer exceptional thermal resistance with minimal weight penalties.
Smart energy management algorithms integrated into robot skin systems optimize power allocation based on environmental conditions and operational requirements. These systems implement dynamic voltage scaling, selective component activation, and predictive thermal management to maximize operational duration while maintaining performance standards in challenging cold-weather scenarios.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!