

Robot Skin vs Human Touch: Measuring Sensitivity Differences
APR 17, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Robot Skin Technology Background and Sensitivity Goals
Robot skin technology represents a critical frontier in robotics and human-machine interaction, emerging from decades of research in tactile sensing and biomimetic engineering. The field originated in the 1980s with basic pressure-sensitive arrays and has evolved into sophisticated multi-modal sensing systems capable of detecting pressure, temperature, texture, and even chemical properties. This technological evolution stems from the fundamental need to bridge the gap between robotic perception and human sensory capabilities.
The development trajectory of robot skin technology has been driven by advances in materials science, particularly flexible electronics, conductive polymers, and nanostructured materials. Early implementations relied on rigid sensor arrays with limited spatial resolution and sensitivity. Contemporary approaches leverage soft robotics principles, incorporating stretchable substrates, distributed sensing networks, and bio-inspired architectures that more closely mimic the structure and function of human skin.
Current technological trends indicate a convergence toward multi-layered sensing architectures that replicate the hierarchical organization of human skin. These systems integrate mechanoreceptor-inspired sensors at various depths, enabling discrimination between different types of tactile stimuli. Advanced signal processing algorithms and machine learning techniques are increasingly employed to interpret complex tactile data patterns and extract meaningful information about object properties and interaction dynamics.
The primary technical objectives in robot skin development center on achieving human-level sensitivity benchmarks across multiple sensory modalities. Spatial resolution targets aim for sub-millimeter discrimination capabilities, matching the approximately 2-3mm two-point discrimination threshold of human fingertips. Pressure sensitivity goals encompass detection ranges from light touch (0.1-1 mN) to firm grasp forces (10-100 N), spanning the full spectrum of human tactile interaction.
Temporal response characteristics represent another critical performance parameter, with target response times below 10 milliseconds to enable real-time tactile feedback during dynamic interactions. Temperature sensitivity objectives focus on detecting variations as small as 0.1°C, comparable to human thermoreceptor capabilities. Additionally, durability and reliability targets emphasize maintaining consistent performance through millions of contact cycles while withstanding mechanical stress and environmental variations.
The ultimate technological vision encompasses creating artificial skin systems that not only match but potentially exceed human tactile capabilities in specific applications. This includes enhanced sensitivity in extreme environments, extended spectral ranges for chemical detection, and integrated computational capabilities for autonomous tactile decision-making. These ambitious goals drive continued innovation in sensor design, materials engineering, and signal processing methodologies.
The development trajectory of robot skin technology has been driven by advances in materials science, particularly flexible electronics, conductive polymers, and nanostructured materials. Early implementations relied on rigid sensor arrays with limited spatial resolution and sensitivity. Contemporary approaches leverage soft robotics principles, incorporating stretchable substrates, distributed sensing networks, and bio-inspired architectures that more closely mimic the structure and function of human skin.
Current technological trends indicate a convergence toward multi-layered sensing architectures that replicate the hierarchical organization of human skin. These systems integrate mechanoreceptor-inspired sensors at various depths, enabling discrimination between different types of tactile stimuli. Advanced signal processing algorithms and machine learning techniques are increasingly employed to interpret complex tactile data patterns and extract meaningful information about object properties and interaction dynamics.
The primary technical objectives in robot skin development center on achieving human-level sensitivity benchmarks across multiple sensory modalities. Spatial resolution targets aim for sub-millimeter discrimination capabilities, matching the approximately 2-3mm two-point discrimination threshold of human fingertips. Pressure sensitivity goals encompass detection ranges from light touch (0.1-1 mN) to firm grasp forces (10-100 N), spanning the full spectrum of human tactile interaction.
Temporal response characteristics represent another critical performance parameter, with target response times below 10 milliseconds to enable real-time tactile feedback during dynamic interactions. Temperature sensitivity objectives focus on detecting variations as small as 0.1°C, comparable to human thermoreceptor capabilities. Additionally, durability and reliability targets emphasize maintaining consistent performance through millions of contact cycles while withstanding mechanical stress and environmental variations.
The ultimate technological vision encompasses creating artificial skin systems that not only match but potentially exceed human tactile capabilities in specific applications. This includes enhanced sensitivity in extreme environments, extended spectral ranges for chemical detection, and integrated computational capabilities for autonomous tactile decision-making. These ambitious goals drive continued innovation in sensor design, materials engineering, and signal processing methodologies.
Market Demand for Tactile-Enabled Robotic Applications
The global robotics market is experiencing unprecedented growth driven by increasing demand for tactile-enabled robotic applications across multiple industries. Healthcare robotics represents one of the most promising sectors, where surgical robots require sophisticated tactile feedback systems to perform delicate procedures with precision comparable to human surgeons. The aging population worldwide has intensified the need for rehabilitation robots and assistive devices that can provide gentle, responsive touch interactions for elderly care and physical therapy applications.
Manufacturing industries are increasingly adopting collaborative robots equipped with advanced tactile sensing capabilities. These cobots must safely interact with human workers while handling delicate components in electronics assembly, automotive manufacturing, and precision machining operations. The demand for robots capable of distinguishing between different material textures, detecting object slippage, and applying appropriate grip forces has become critical for quality control and operational efficiency.
Service robotics presents another rapidly expanding market segment where tactile sensitivity plays a crucial role. Personal care robots, hospitality service robots, and domestic assistance robots require sophisticated touch sensing to interact naturally with humans and handle everyday objects. The COVID-19 pandemic has accelerated adoption of contactless service robots, yet paradoxically increased demand for robots capable of performing tasks traditionally requiring human touch sensitivity.
The prosthetics and rehabilitation market represents a specialized but high-value application area where tactile feedback technology directly impacts quality of life. Advanced prosthetic limbs incorporating tactile sensing systems enable amputees to regain natural manipulation capabilities, driving significant investment in haptic feedback research and development.
Industrial inspection and maintenance applications increasingly require robots capable of detecting surface defects, material inconsistencies, and structural anomalies through tactile sensing. Quality assurance processes in pharmaceutical, food processing, and textile industries demand robotic systems that can replicate or exceed human tactile discrimination abilities.
Emerging applications in space exploration, deep-sea operations, and hazardous environment monitoring are creating niche but lucrative markets for robots with enhanced tactile capabilities. These extreme environment applications often require tactile sensitivity that surpasses human capabilities while operating in conditions where human presence is impossible or dangerous.
The convergence of artificial intelligence, advanced materials science, and sensor miniaturization is expanding the addressable market for tactile-enabled robotics. Market growth is further accelerated by decreasing costs of tactile sensor arrays and increasing computational power available for real-time tactile data processing.
Manufacturing industries are increasingly adopting collaborative robots equipped with advanced tactile sensing capabilities. These cobots must safely interact with human workers while handling delicate components in electronics assembly, automotive manufacturing, and precision machining operations. The demand for robots capable of distinguishing between different material textures, detecting object slippage, and applying appropriate grip forces has become critical for quality control and operational efficiency.
Service robotics presents another rapidly expanding market segment where tactile sensitivity plays a crucial role. Personal care robots, hospitality service robots, and domestic assistance robots require sophisticated touch sensing to interact naturally with humans and handle everyday objects. The COVID-19 pandemic has accelerated adoption of contactless service robots, yet paradoxically increased demand for robots capable of performing tasks traditionally requiring human touch sensitivity.
The prosthetics and rehabilitation market represents a specialized but high-value application area where tactile feedback technology directly impacts quality of life. Advanced prosthetic limbs incorporating tactile sensing systems enable amputees to regain natural manipulation capabilities, driving significant investment in haptic feedback research and development.
Industrial inspection and maintenance applications increasingly require robots capable of detecting surface defects, material inconsistencies, and structural anomalies through tactile sensing. Quality assurance processes in pharmaceutical, food processing, and textile industries demand robotic systems that can replicate or exceed human tactile discrimination abilities.
Emerging applications in space exploration, deep-sea operations, and hazardous environment monitoring are creating niche but lucrative markets for robots with enhanced tactile capabilities. These extreme environment applications often require tactile sensitivity that surpasses human capabilities while operating in conditions where human presence is impossible or dangerous.
The convergence of artificial intelligence, advanced materials science, and sensor miniaturization is expanding the addressable market for tactile-enabled robotics. Market growth is further accelerated by decreasing costs of tactile sensor arrays and increasing computational power available for real-time tactile data processing.
Current State of Robot Skin vs Human Touch Sensitivity
The current landscape of robot skin technology reveals significant disparities when compared to human tactile sensitivity capabilities. Human skin contains approximately 17,000 mechanoreceptors in the hand alone, with different receptor types specialized for various stimuli including pressure, vibration, texture, and temperature. These receptors can detect forces as low as 0.02 mN and distinguish surface textures with nanometer-scale differences.
Contemporary robotic tactile systems primarily rely on three main sensing technologies: resistive, capacitive, and piezoelectric sensors. Resistive sensors, while cost-effective, typically exhibit limited sensitivity ranges of 0.1-10 N and suffer from hysteresis issues. Capacitive sensors demonstrate better performance with detection thresholds around 0.01 N but face challenges in multi-touch scenarios and environmental interference.
Piezoelectric-based systems show promise for dynamic touch detection, achieving sensitivity levels approaching 0.001 N for vibration sensing. However, they struggle with static pressure measurement, a fundamental limitation compared to human skin's ability to maintain sustained pressure awareness. Recent developments in flexible electronics have enabled sensor arrays with spatial resolutions of 1-2 mm, still significantly coarser than human fingertip resolution of approximately 0.5 mm.
Material science advances have introduced novel approaches including liquid metal-based sensors, carbon nanotube networks, and bio-inspired microstructures. These technologies demonstrate improved sensitivity ranges, with some experimental systems achieving force detection below 0.001 N. However, durability remains problematic, with most advanced materials showing degradation after 10,000-100,000 cycles compared to human skin's continuous regeneration capability.
Integration challenges persist in translating sensor data into meaningful tactile information. Current systems typically process 100-1000 sensor points at frequencies up to 1 kHz, while human tactile processing involves millions of nerve fibers operating at much higher temporal resolutions. Signal processing algorithms struggle to replicate human-like texture discrimination and object recognition capabilities.
Manufacturing scalability represents another critical constraint. While laboratory demonstrations show impressive sensitivity achievements, production-ready systems often compromise performance for reliability and cost considerations. The gap between research prototypes and commercially viable robot skin solutions remains substantial, with most industrial applications settling for basic contact detection rather than nuanced tactile sensing.
Contemporary robotic tactile systems primarily rely on three main sensing technologies: resistive, capacitive, and piezoelectric sensors. Resistive sensors, while cost-effective, typically exhibit limited sensitivity ranges of 0.1-10 N and suffer from hysteresis issues. Capacitive sensors demonstrate better performance with detection thresholds around 0.01 N but face challenges in multi-touch scenarios and environmental interference.
Piezoelectric-based systems show promise for dynamic touch detection, achieving sensitivity levels approaching 0.001 N for vibration sensing. However, they struggle with static pressure measurement, a fundamental limitation compared to human skin's ability to maintain sustained pressure awareness. Recent developments in flexible electronics have enabled sensor arrays with spatial resolutions of 1-2 mm, still significantly coarser than human fingertip resolution of approximately 0.5 mm.
Material science advances have introduced novel approaches including liquid metal-based sensors, carbon nanotube networks, and bio-inspired microstructures. These technologies demonstrate improved sensitivity ranges, with some experimental systems achieving force detection below 0.001 N. However, durability remains problematic, with most advanced materials showing degradation after 10,000-100,000 cycles compared to human skin's continuous regeneration capability.
Integration challenges persist in translating sensor data into meaningful tactile information. Current systems typically process 100-1000 sensor points at frequencies up to 1 kHz, while human tactile processing involves millions of nerve fibers operating at much higher temporal resolutions. Signal processing algorithms struggle to replicate human-like texture discrimination and object recognition capabilities.
Manufacturing scalability represents another critical constraint. While laboratory demonstrations show impressive sensitivity achievements, production-ready systems often compromise performance for reliability and cost considerations. The gap between research prototypes and commercially viable robot skin solutions remains substantial, with most industrial applications settling for basic contact detection rather than nuanced tactile sensing.
Existing Solutions for Robot Touch Sensitivity Measurement
01 Tactile sensor arrays for robot skin
Robot skin sensitivity can be enhanced through the use of tactile sensor arrays that detect pressure, force, and touch. These arrays typically consist of multiple sensing elements distributed across a flexible substrate, enabling robots to perceive contact and interaction with objects. The sensors can be based on various technologies including capacitive, resistive, or piezoelectric principles to measure mechanical stimuli and convert them into electrical signals for processing.- Tactile sensor arrays for robot skin: Robot skin can be equipped with tactile sensor arrays that detect pressure, force, and touch through various sensing mechanisms. These arrays typically consist of multiple sensing units distributed across a flexible substrate, enabling robots to perceive contact and interaction with objects. The sensors can utilize capacitive, resistive, or piezoelectric principles to convert mechanical stimuli into electrical signals, providing spatial resolution for touch detection.
- Flexible and stretchable skin materials: The development of flexible and stretchable materials is crucial for robot skin sensitivity. These materials allow the skin to conform to curved surfaces and withstand deformation during robot movement. Elastomeric substrates, conductive polymers, and composite materials are employed to maintain sensing functionality while accommodating mechanical strain. The materials enable continuous sensing even when the robot skin is bent or stretched.
- Multi-modal sensing capabilities: Advanced robot skin incorporates multi-modal sensing to detect various stimuli simultaneously, including pressure, temperature, vibration, and proximity. This integration allows robots to gather comprehensive information about their environment and interactions. Different sensor types are combined within the same skin structure, with signal processing algorithms distinguishing between different types of stimuli to enhance the robot's perception and response capabilities.
- Signal processing and sensitivity enhancement: Signal processing techniques are employed to enhance the sensitivity and accuracy of robot skin sensors. These methods include noise filtering, signal amplification, and pattern recognition algorithms that interpret sensor data. Advanced processing enables detection of subtle touches and differentiation between various contact types. Machine learning approaches can be integrated to improve sensitivity calibration and adaptive response to different interaction scenarios.
- Biomimetic design and human-like sensitivity: Biomimetic approaches aim to replicate the sensitivity and functionality of human skin in robotic applications. These designs incorporate hierarchical structures, mechanoreceptor-inspired sensing elements, and distributed neural network-like processing. The goal is to achieve sensitivity levels comparable to human touch perception, enabling natural human-robot interaction and delicate object manipulation. Such designs often feature layered structures mimicking the epidermis and dermis of biological skin.
02 Flexible and stretchable skin materials
The development of flexible and stretchable materials is crucial for creating robot skin that can conform to curved surfaces and withstand deformation during movement. These materials often incorporate elastomeric substrates, conductive polymers, or nanomaterials that maintain sensing capabilities while being mechanically compliant. The flexibility allows the robot skin to be applied to various robotic structures including joints and irregular surfaces without compromising sensitivity.Expand Specific Solutions03 Multi-modal sensing capabilities
Advanced robot skin systems integrate multiple sensing modalities to detect different types of stimuli simultaneously, such as pressure, temperature, vibration, and proximity. This multi-modal approach enables robots to gather comprehensive information about their environment and interactions, similar to human skin. The integration of different sensor types within a single skin structure allows for more sophisticated tactile perception and improved robot performance in complex tasks.Expand Specific Solutions04 Signal processing and sensitivity enhancement
Improving robot skin sensitivity involves advanced signal processing techniques and circuit designs that amplify weak signals and reduce noise. These methods include the use of specialized readout circuits, filtering algorithms, and calibration procedures to enhance the detection threshold and accuracy of tactile sensors. The processing systems can also incorporate machine learning algorithms to interpret complex tactile patterns and improve the discrimination of different touch stimuli.Expand Specific Solutions05 Bio-inspired and biomimetic designs
Robot skin designs often draw inspiration from biological systems, particularly human skin structure and mechanoreceptors, to achieve high sensitivity and functionality. These biomimetic approaches replicate features such as layered structures, receptor distribution patterns, and adaptive response characteristics found in natural skin. By mimicking biological principles, robot skin can achieve enhanced sensitivity, selectivity, and the ability to detect subtle tactile information relevant for delicate manipulation and human-robot interaction.Expand Specific Solutions
Key Players in Robot Skin and Tactile Sensor Industry
The robot skin sensitivity measurement field represents an emerging technological domain in the early development stage, characterized by significant research momentum from leading academic institutions and growing commercial interest. The market remains nascent with substantial growth potential as tactile sensing becomes critical for next-generation robotics applications. Technology maturity varies considerably across players, with established research powerhouses like MIT, University of Tokyo, and Carnegie Mellon University driving fundamental breakthroughs in tactile sensor design and haptic feedback systems. Industrial leaders including Toyota Central R&D Labs, Samsung Electronics, and Honda Motor are advancing practical implementations, while specialized companies like Tujian Technology and OnRobot focus on commercial tactile solutions. The competitive landscape spans from theoretical research at institutions like Zhejiang University and KAIST to applied development at organizations like Fraunhofer-Gesellschaft and AIST, indicating a technology transitioning from laboratory concepts toward market-ready applications with significant innovation potential.
Massachusetts Institute of Technology
Technical Solution: MIT has developed advanced tactile sensing technologies including multi-modal artificial skin systems that integrate pressure, temperature, and texture sensing capabilities. Their research focuses on biomimetic tactile sensors using flexible electronics and machine learning algorithms to process tactile data. The institute has created artificial skin prototypes with sensitivity approaching human fingertip levels, achieving spatial resolution of 1-2mm and pressure sensitivity down to 0.1N. Their tactile sensing systems incorporate distributed sensor arrays with real-time processing capabilities for robotic manipulation tasks.
Strengths: Leading research institution with cutting-edge sensor technology and strong AI integration capabilities. Weaknesses: Academic focus may limit immediate commercial applications and scalability for mass production.
Toyota Motor Corp.
Technical Solution: Toyota has developed tactile sensing systems for their humanoid robots and automotive applications, focusing on safety-critical touch sensitivity for human-robot interaction. Their artificial skin technology incorporates distributed pressure sensors with haptic feedback capabilities, enabling robots to detect contact forces and adjust grip strength accordingly. The system uses polymer-based flexible sensors with embedded electronics that can differentiate between various touch pressures and textures. Toyota's tactile sensing research emphasizes real-world robotic applications including assembly line operations and service robotics with human safety considerations.
Strengths: Extensive robotics experience with focus on practical applications and human safety integration. Weaknesses: Primarily focused on automotive and industrial applications rather than general-purpose tactile sensing research.
Core Innovations in Tactile Sensing and Haptic Feedback
Artificial skin flexible tactile sensor measurement device
PatentInactiveCN105738012A
Innovation
- It adopts a bionic artificial skin structure, consisting of a bionic epidermal tissue layer, a bionic dermal tissue layer, a bionic subcutaneous tissue layer and an artificial skin attachment base. It is implanted with a liquid core PVDF piezoelectric polymer fiber and passed through flexible insulating rubber, 705 flexible soft glue and Warm vulcanized silicone rubber layer enables flexible tactile sensor design.
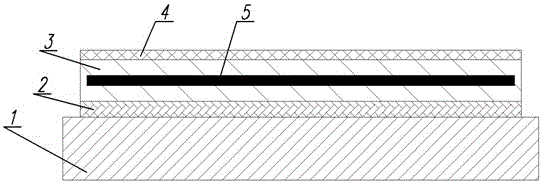

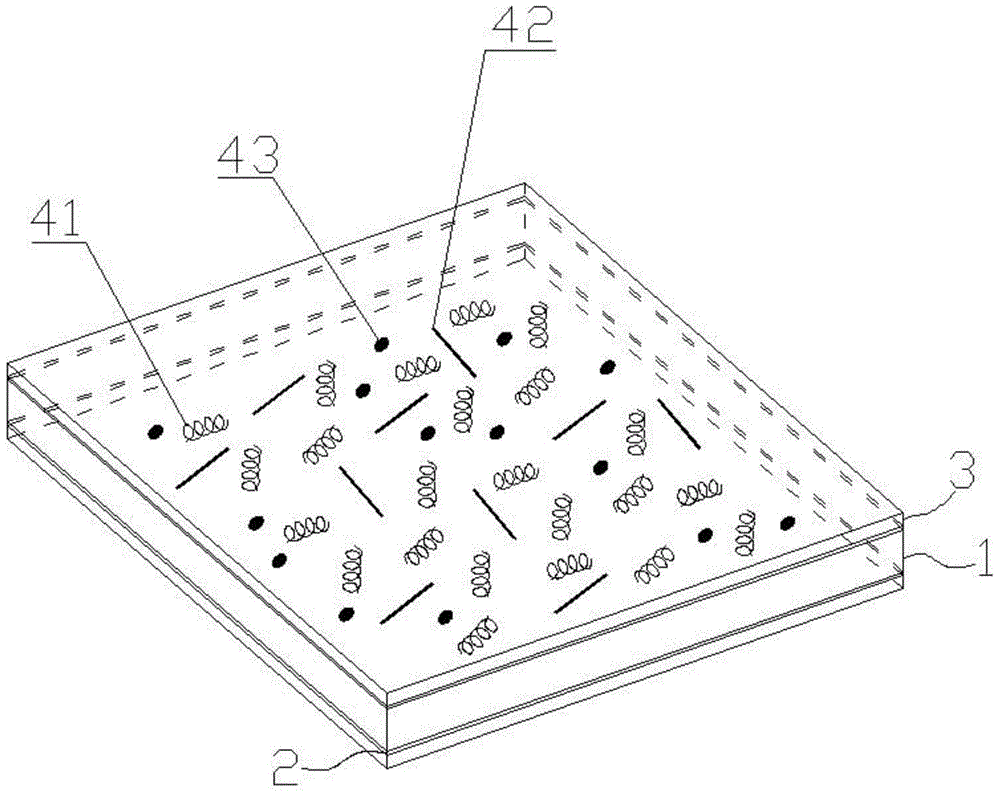
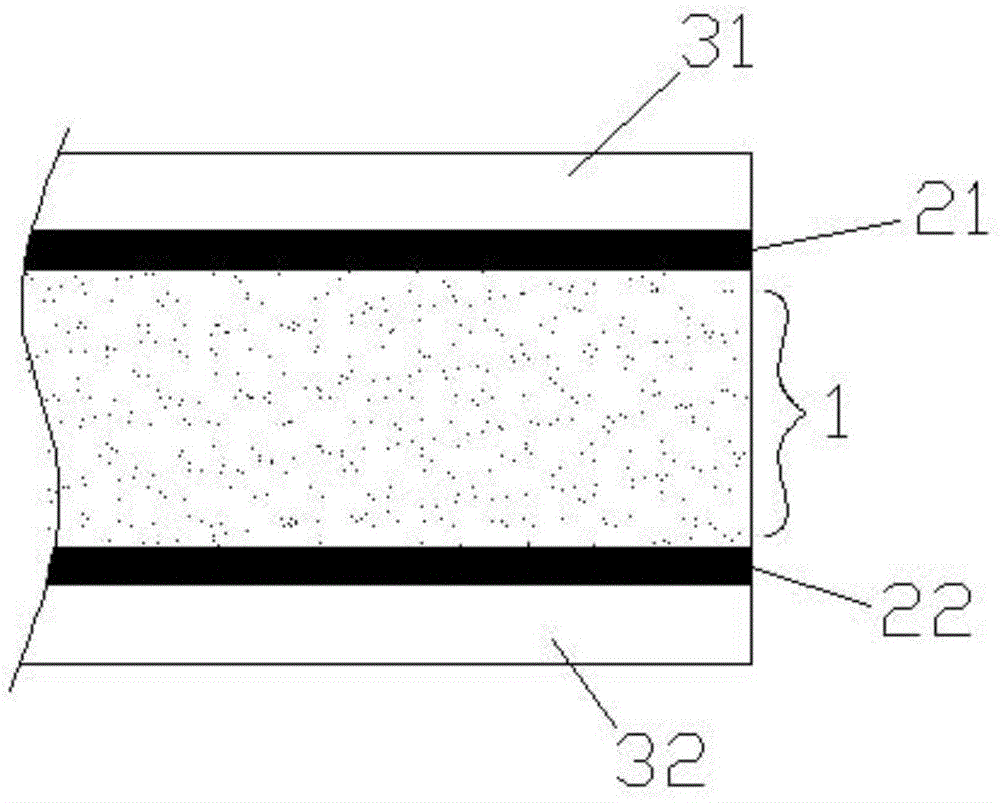
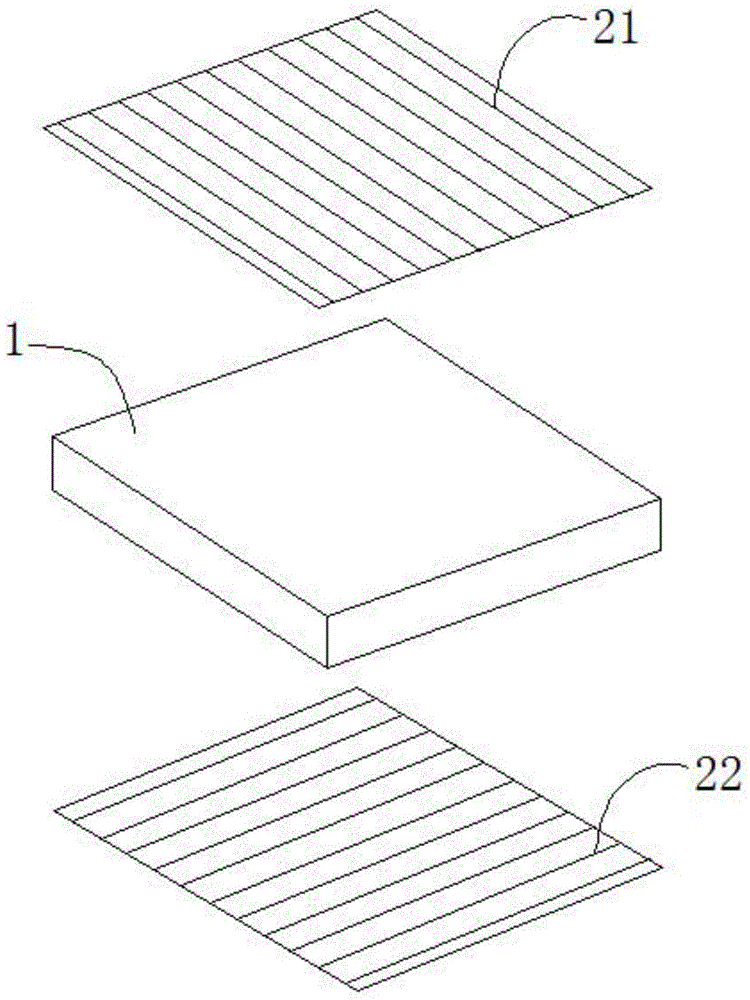
High-sensitivity intelligent robot skin
PatentActiveCN104827491A
Innovation
- Using a conductive monomer and polymer-doped composite layer, the electrode layer is plated, and the outer layer is wrapped, including conductive micro-springs, fibers and particles, combined with electroplated or chemically plated conductive lines and polymer films to form a soft composite structure. Simulates the tactile sensation of human skin.

Safety Standards for Human-Robot Tactile Interaction
The establishment of comprehensive safety standards for human-robot tactile interaction represents a critical regulatory framework necessary to ensure secure physical contact between humans and robotic systems equipped with artificial skin technologies. Current international standards such as ISO 10218 and ISO/TS 15066 provide foundational guidelines for collaborative robotics, yet they lack specific provisions addressing the nuanced requirements of tactile-enabled robots that can sense and respond to human touch with varying degrees of sensitivity.
Existing safety protocols primarily focus on force and speed limitations during human-robot collaboration, establishing maximum allowable contact forces and minimum separation distances. However, these standards inadequately address scenarios where robots possess sophisticated tactile sensing capabilities that may exceed or fall short of human sensitivity thresholds. The integration of artificial skin technologies introduces new safety considerations, particularly regarding appropriate response mechanisms when tactile sensors detect unexpected contact patterns or pressure variations.
Emerging regulatory frameworks are beginning to incorporate tactile-specific safety requirements, including mandatory fail-safe mechanisms that activate when artificial skin sensors detect contact forces exceeding predetermined thresholds. These standards emphasize the importance of calibrating robotic tactile responses to match or complement human sensitivity levels, ensuring that robots can appropriately modulate their behavior based on tactile feedback intensity and duration.
Key safety requirements under development include real-time tactile monitoring systems, emergency stop protocols triggered by abnormal touch patterns, and standardized testing procedures for validating artificial skin sensitivity across different operational environments. Additionally, proposed standards mandate comprehensive documentation of tactile sensor performance characteristics, including sensitivity ranges, response times, and failure modes.
The regulatory landscape also addresses data privacy concerns related to tactile information collection, establishing guidelines for secure storage and processing of touch-based biometric data. Future safety standards will likely incorporate adaptive safety zones that dynamically adjust based on real-time tactile feedback, creating more intuitive and secure human-robot interaction paradigms while maintaining strict safety compliance across diverse application domains.
Existing safety protocols primarily focus on force and speed limitations during human-robot collaboration, establishing maximum allowable contact forces and minimum separation distances. However, these standards inadequately address scenarios where robots possess sophisticated tactile sensing capabilities that may exceed or fall short of human sensitivity thresholds. The integration of artificial skin technologies introduces new safety considerations, particularly regarding appropriate response mechanisms when tactile sensors detect unexpected contact patterns or pressure variations.
Emerging regulatory frameworks are beginning to incorporate tactile-specific safety requirements, including mandatory fail-safe mechanisms that activate when artificial skin sensors detect contact forces exceeding predetermined thresholds. These standards emphasize the importance of calibrating robotic tactile responses to match or complement human sensitivity levels, ensuring that robots can appropriately modulate their behavior based on tactile feedback intensity and duration.
Key safety requirements under development include real-time tactile monitoring systems, emergency stop protocols triggered by abnormal touch patterns, and standardized testing procedures for validating artificial skin sensitivity across different operational environments. Additionally, proposed standards mandate comprehensive documentation of tactile sensor performance characteristics, including sensitivity ranges, response times, and failure modes.
The regulatory landscape also addresses data privacy concerns related to tactile information collection, establishing guidelines for secure storage and processing of touch-based biometric data. Future safety standards will likely incorporate adaptive safety zones that dynamically adjust based on real-time tactile feedback, creating more intuitive and secure human-robot interaction paradigms while maintaining strict safety compliance across diverse application domains.
Biomimetic Design Ethics in Robot Skin Development
The development of robot skin technology that mimics human tactile sensitivity raises profound ethical considerations that extend beyond mere technical achievement. As researchers strive to replicate the intricate sensory capabilities of human skin, fundamental questions emerge about the moral implications of creating artificial systems that can potentially match or exceed human sensory perception.
The principle of informed consent becomes particularly complex when developing biomimetic robot skin for applications involving human interaction. Unlike traditional robotics where mechanical interfaces are clearly distinguishable, highly sensitive artificial skin may blur the boundaries between human and machine touch, potentially deceiving users about the nature of their interaction. This deception raises concerns about autonomy and the right to know whether one is interacting with biological or artificial entities.
Privacy considerations intensify as robot skin sensitivity approaches human levels. Advanced tactile sensors capable of detecting minute pressure variations, temperature changes, and surface textures could inadvertently collect intimate biometric data through casual contact. The potential for such systems to identify individuals through unique touch patterns or physiological characteristics creates unprecedented surveillance capabilities that demand careful ethical oversight.
The enhancement paradox presents another ethical dimension where robot skin sensitivity might surpass human capabilities. While superior tactile perception could benefit medical applications and assistive technologies, it also raises questions about fairness and the potential creation of sensory hierarchies between humans and machines. This technological superiority could fundamentally alter human-robot relationships and challenge traditional notions of human uniqueness.
Consent frameworks must evolve to address scenarios where individuals interact with robots possessing human-like or superior tactile sensitivity. Current ethical guidelines inadequately address situations where artificial systems can perceive and respond to human touch with unprecedented precision, potentially creating emotional bonds or dependencies that users may not fully comprehend.
The dual-use nature of highly sensitive robot skin technology presents additional ethical challenges. While intended for beneficial applications such as prosthetics or caregiving robots, the same technology could be repurposed for surveillance, manipulation, or other harmful uses. Establishing robust governance frameworks becomes essential to prevent misuse while fostering beneficial innovation.
Ultimately, the ethical development of biomimetic robot skin requires proactive engagement with diverse stakeholders, including ethicists, users, and affected communities, to ensure that technological advancement serves human welfare while respecting fundamental rights and dignity.
The principle of informed consent becomes particularly complex when developing biomimetic robot skin for applications involving human interaction. Unlike traditional robotics where mechanical interfaces are clearly distinguishable, highly sensitive artificial skin may blur the boundaries between human and machine touch, potentially deceiving users about the nature of their interaction. This deception raises concerns about autonomy and the right to know whether one is interacting with biological or artificial entities.
Privacy considerations intensify as robot skin sensitivity approaches human levels. Advanced tactile sensors capable of detecting minute pressure variations, temperature changes, and surface textures could inadvertently collect intimate biometric data through casual contact. The potential for such systems to identify individuals through unique touch patterns or physiological characteristics creates unprecedented surveillance capabilities that demand careful ethical oversight.
The enhancement paradox presents another ethical dimension where robot skin sensitivity might surpass human capabilities. While superior tactile perception could benefit medical applications and assistive technologies, it also raises questions about fairness and the potential creation of sensory hierarchies between humans and machines. This technological superiority could fundamentally alter human-robot relationships and challenge traditional notions of human uniqueness.
Consent frameworks must evolve to address scenarios where individuals interact with robots possessing human-like or superior tactile sensitivity. Current ethical guidelines inadequately address situations where artificial systems can perceive and respond to human touch with unprecedented precision, potentially creating emotional bonds or dependencies that users may not fully comprehend.
The dual-use nature of highly sensitive robot skin technology presents additional ethical challenges. While intended for beneficial applications such as prosthetics or caregiving robots, the same technology could be repurposed for surveillance, manipulation, or other harmful uses. Establishing robust governance frameworks becomes essential to prevent misuse while fostering beneficial innovation.
Ultimately, the ethical development of biomimetic robot skin requires proactive engagement with diverse stakeholders, including ethicists, users, and affected communities, to ensure that technological advancement serves human welfare while respecting fundamental rights and dignity.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!