

Compare Mobile Manipulation Frameworks: Flexibility and Scalability
APR 24, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Mobile Manipulation Framework Evolution and Objectives
Mobile manipulation frameworks have undergone significant evolution since the early 2000s, transitioning from rigid, task-specific systems to highly flexible and scalable platforms. The initial frameworks were primarily developed for industrial applications, focusing on predetermined manipulation tasks within controlled environments. These early systems lacked the adaptability required for dynamic real-world scenarios and were limited by computational constraints and sensor technologies.
The development trajectory of mobile manipulation has been driven by advances in robotics perception, artificial intelligence, and distributed computing architectures. Modern frameworks have evolved to address the fundamental challenge of combining mobility and manipulation capabilities while maintaining system stability and precision. This evolution reflects the growing demand for robots capable of operating in unstructured environments, from warehouse automation to domestic assistance applications.
Contemporary mobile manipulation frameworks aim to achieve several critical objectives that define their effectiveness in real-world deployments. Flexibility represents a primary objective, encompassing the ability to adapt to diverse manipulation tasks, varying environmental conditions, and different robotic hardware configurations. This includes supporting multiple arm configurations, gripper types, and mobile base platforms within a unified software architecture.
Scalability constitutes another fundamental objective, addressing both computational scalability and deployment scalability. Computational scalability involves efficiently managing increasing complexity in perception, planning, and control algorithms as task requirements expand. Deployment scalability focuses on the framework's ability to support multiple robots operating simultaneously while maintaining coordination and resource allocation efficiency.
The integration of modular architectures has become a central design principle, enabling frameworks to accommodate heterogeneous robotic systems and facilitate rapid prototyping of new capabilities. Modern frameworks prioritize real-time performance requirements while supporting complex decision-making processes that combine motion planning, grasp planning, and task scheduling.
Safety and reliability objectives have gained prominence as mobile manipulation systems transition from research environments to commercial applications. Frameworks must incorporate robust error handling, collision avoidance, and fail-safe mechanisms to ensure safe human-robot interaction and protect valuable equipment and inventory.
The emergence of cloud-based and edge computing paradigms has influenced framework objectives toward distributed processing capabilities, enabling resource-intensive computations to be offloaded while maintaining low-latency control loops for critical manipulation tasks. This architectural evolution supports the deployment of sophisticated AI algorithms without compromising real-time performance requirements essential for precise manipulation operations.
The development trajectory of mobile manipulation has been driven by advances in robotics perception, artificial intelligence, and distributed computing architectures. Modern frameworks have evolved to address the fundamental challenge of combining mobility and manipulation capabilities while maintaining system stability and precision. This evolution reflects the growing demand for robots capable of operating in unstructured environments, from warehouse automation to domestic assistance applications.
Contemporary mobile manipulation frameworks aim to achieve several critical objectives that define their effectiveness in real-world deployments. Flexibility represents a primary objective, encompassing the ability to adapt to diverse manipulation tasks, varying environmental conditions, and different robotic hardware configurations. This includes supporting multiple arm configurations, gripper types, and mobile base platforms within a unified software architecture.
Scalability constitutes another fundamental objective, addressing both computational scalability and deployment scalability. Computational scalability involves efficiently managing increasing complexity in perception, planning, and control algorithms as task requirements expand. Deployment scalability focuses on the framework's ability to support multiple robots operating simultaneously while maintaining coordination and resource allocation efficiency.
The integration of modular architectures has become a central design principle, enabling frameworks to accommodate heterogeneous robotic systems and facilitate rapid prototyping of new capabilities. Modern frameworks prioritize real-time performance requirements while supporting complex decision-making processes that combine motion planning, grasp planning, and task scheduling.
Safety and reliability objectives have gained prominence as mobile manipulation systems transition from research environments to commercial applications. Frameworks must incorporate robust error handling, collision avoidance, and fail-safe mechanisms to ensure safe human-robot interaction and protect valuable equipment and inventory.
The emergence of cloud-based and edge computing paradigms has influenced framework objectives toward distributed processing capabilities, enabling resource-intensive computations to be offloaded while maintaining low-latency control loops for critical manipulation tasks. This architectural evolution supports the deployment of sophisticated AI algorithms without compromising real-time performance requirements essential for precise manipulation operations.
Market Demand for Flexible Mobile Manipulation Systems
The global market for flexible mobile manipulation systems is experiencing unprecedented growth driven by the convergence of artificial intelligence, robotics, and automation technologies. Industries across manufacturing, logistics, healthcare, and service sectors are increasingly recognizing the transformative potential of mobile robots capable of performing complex manipulation tasks in dynamic environments.
Manufacturing industries represent the largest demand segment, where flexible mobile manipulation systems address critical challenges in production line optimization and adaptive manufacturing processes. Automotive manufacturers are particularly driving demand for systems that can handle diverse assembly tasks while maintaining high precision and reliability. The need for mass customization and flexible production lines has created substantial market opportunities for scalable mobile manipulation frameworks.
Logistics and warehousing sectors demonstrate rapidly expanding demand, fueled by e-commerce growth and supply chain optimization requirements. Companies seek mobile manipulation solutions capable of handling diverse package sizes, weights, and materials while operating efficiently in complex warehouse environments. The scalability aspect becomes crucial as operations need to adapt to seasonal fluctuations and varying throughput requirements.
Healthcare applications are emerging as a significant demand driver, particularly in hospital logistics, pharmaceutical handling, and elderly care assistance. The COVID-19 pandemic has accelerated adoption of contactless automation solutions, creating sustained demand for flexible mobile manipulation systems capable of performing sanitization, delivery, and patient assistance tasks.
Service robotics markets show strong growth potential, with applications ranging from retail assistance to hospitality services. Consumer expectations for personalized and efficient service delivery are pushing businesses to invest in mobile manipulation technologies that can adapt to diverse customer interaction scenarios.
The demand landscape is characterized by increasing emphasis on system interoperability and standardization. Organizations require frameworks that can integrate seamlessly with existing infrastructure while providing flexibility to accommodate future technological developments. This trend is driving preference for open-architecture solutions over proprietary systems, influencing market dynamics and competitive positioning strategies.
Manufacturing industries represent the largest demand segment, where flexible mobile manipulation systems address critical challenges in production line optimization and adaptive manufacturing processes. Automotive manufacturers are particularly driving demand for systems that can handle diverse assembly tasks while maintaining high precision and reliability. The need for mass customization and flexible production lines has created substantial market opportunities for scalable mobile manipulation frameworks.
Logistics and warehousing sectors demonstrate rapidly expanding demand, fueled by e-commerce growth and supply chain optimization requirements. Companies seek mobile manipulation solutions capable of handling diverse package sizes, weights, and materials while operating efficiently in complex warehouse environments. The scalability aspect becomes crucial as operations need to adapt to seasonal fluctuations and varying throughput requirements.
Healthcare applications are emerging as a significant demand driver, particularly in hospital logistics, pharmaceutical handling, and elderly care assistance. The COVID-19 pandemic has accelerated adoption of contactless automation solutions, creating sustained demand for flexible mobile manipulation systems capable of performing sanitization, delivery, and patient assistance tasks.
Service robotics markets show strong growth potential, with applications ranging from retail assistance to hospitality services. Consumer expectations for personalized and efficient service delivery are pushing businesses to invest in mobile manipulation technologies that can adapt to diverse customer interaction scenarios.
The demand landscape is characterized by increasing emphasis on system interoperability and standardization. Organizations require frameworks that can integrate seamlessly with existing infrastructure while providing flexibility to accommodate future technological developments. This trend is driving preference for open-architecture solutions over proprietary systems, influencing market dynamics and competitive positioning strategies.
Current Framework Limitations and Scalability Challenges
Current mobile manipulation frameworks face significant architectural constraints that limit their adaptability across diverse operational environments. Most existing frameworks are designed with rigid coupling between perception, planning, and control modules, making it challenging to swap components or integrate new algorithms without extensive system modifications. This monolithic architecture creates bottlenecks when attempting to customize solutions for specific applications or incorporate emerging technologies.
The computational scalability of current frameworks presents substantial challenges for real-world deployment. Many frameworks struggle with real-time performance requirements when processing high-dimensional sensor data from multiple sources simultaneously. The computational overhead increases exponentially with the complexity of manipulation tasks, particularly when dealing with dynamic environments that require continuous replanning and adaptation.
Hardware heterogeneity poses another critical limitation in existing mobile manipulation systems. Current frameworks often lack standardized interfaces that can seamlessly accommodate different robot platforms, sensor configurations, and actuator types. This hardware dependency forces developers to create platform-specific implementations, significantly increasing development time and reducing code reusability across different robotic systems.
Multi-robot coordination capabilities remain underdeveloped in most contemporary frameworks. While individual robot performance has improved substantially, scaling to multi-agent scenarios introduces complex synchronization and communication challenges that current architectures struggle to address efficiently. The lack of distributed computing paradigms within these frameworks limits their ability to leverage collective intelligence and shared computational resources.
Memory and resource management inefficiencies further constrain framework scalability. Many existing solutions exhibit memory leaks during extended operations and lack sophisticated resource allocation mechanisms. This becomes particularly problematic in long-duration missions where robots must maintain consistent performance over extended periods without manual intervention.
Integration complexity with existing enterprise systems represents a significant barrier to widespread adoption. Current frameworks often require specialized expertise for deployment and maintenance, limiting their accessibility to organizations without dedicated robotics teams. The absence of standardized APIs and configuration management tools complicates integration with existing warehouse management systems, manufacturing execution systems, and other enterprise infrastructure.
The computational scalability of current frameworks presents substantial challenges for real-world deployment. Many frameworks struggle with real-time performance requirements when processing high-dimensional sensor data from multiple sources simultaneously. The computational overhead increases exponentially with the complexity of manipulation tasks, particularly when dealing with dynamic environments that require continuous replanning and adaptation.
Hardware heterogeneity poses another critical limitation in existing mobile manipulation systems. Current frameworks often lack standardized interfaces that can seamlessly accommodate different robot platforms, sensor configurations, and actuator types. This hardware dependency forces developers to create platform-specific implementations, significantly increasing development time and reducing code reusability across different robotic systems.
Multi-robot coordination capabilities remain underdeveloped in most contemporary frameworks. While individual robot performance has improved substantially, scaling to multi-agent scenarios introduces complex synchronization and communication challenges that current architectures struggle to address efficiently. The lack of distributed computing paradigms within these frameworks limits their ability to leverage collective intelligence and shared computational resources.
Memory and resource management inefficiencies further constrain framework scalability. Many existing solutions exhibit memory leaks during extended operations and lack sophisticated resource allocation mechanisms. This becomes particularly problematic in long-duration missions where robots must maintain consistent performance over extended periods without manual intervention.
Integration complexity with existing enterprise systems represents a significant barrier to widespread adoption. Current frameworks often require specialized expertise for deployment and maintenance, limiting their accessibility to organizations without dedicated robotics teams. The absence of standardized APIs and configuration management tools complicates integration with existing warehouse management systems, manufacturing execution systems, and other enterprise infrastructure.
Existing Framework Solutions and Implementation Approaches
01 Modular architecture for mobile manipulation systems
Mobile manipulation frameworks can be designed with modular architectures that allow for flexible integration of different components and subsystems. This approach enables the system to be easily reconfigured and adapted to various tasks and environments. The modular design supports the addition or replacement of hardware and software modules without requiring complete system redesign, thereby enhancing both flexibility and scalability of the manipulation platform.- Modular architecture for mobile manipulation systems: Mobile manipulation frameworks can be designed with modular architectures that allow for flexible integration of different components and subsystems. This approach enables easy reconfiguration and adaptation of the system to various tasks and environments. The modular design supports scalability by allowing components to be added, removed, or replaced without affecting the entire system structure. This architecture facilitates maintenance, upgrades, and customization according to specific application requirements.
- Distributed control systems for enhanced flexibility: Implementing distributed control architectures in mobile manipulation frameworks allows for decentralized decision-making and processing. This approach enhances system flexibility by enabling multiple control nodes to operate independently while coordinating their actions. The distributed nature improves scalability as additional control units can be integrated into the network without requiring complete system redesign. This method also provides better fault tolerance and allows for parallel processing of manipulation tasks.
- Adaptive motion planning and task execution: Mobile manipulation frameworks incorporate adaptive algorithms that enable dynamic adjustment of motion plans and task execution strategies based on environmental conditions and task requirements. These systems can automatically reconfigure their behavior to handle different manipulation scenarios without manual reprogramming. The adaptive capabilities support scalability by allowing the framework to accommodate varying complexity levels and workspace constraints. Real-time adaptation mechanisms ensure efficient operation across diverse application domains.
- Standardized interfaces and communication protocols: The implementation of standardized interfaces and communication protocols in mobile manipulation frameworks facilitates interoperability between different hardware and software components. These standards enable seamless integration of third-party modules and sensors, enhancing system flexibility. Scalability is achieved through the ability to connect multiple devices and subsystems using common communication methods. The standardized approach reduces development time and allows for easier system expansion and modification.
- Hierarchical task planning and execution frameworks: Mobile manipulation systems utilize hierarchical frameworks that organize tasks into multiple levels of abstraction, from high-level mission planning to low-level motion control. This hierarchical structure provides flexibility in task specification and execution while maintaining system coherence. Scalability is supported through the ability to add new task layers or modify existing ones without disrupting other levels. The framework allows for efficient resource allocation and coordination of complex manipulation sequences across different operational scales.
02 Distributed control systems for scalable manipulation
Implementing distributed control architectures allows mobile manipulation systems to scale effectively by distributing computational loads across multiple processing units. This approach enables parallel processing of manipulation tasks and sensor data, improving system responsiveness and capability. The distributed framework facilitates the coordination of multiple robotic agents and supports hierarchical control structures that can be expanded as system complexity increases.Expand Specific Solutions03 Standardized communication interfaces and protocols
Establishing standardized communication interfaces and protocols within mobile manipulation frameworks ensures interoperability between different system components and external devices. This standardization enables seamless integration of sensors, actuators, and control systems from various manufacturers. The use of common communication standards facilitates system expansion and modification, allowing new components to be incorporated without extensive custom integration work.Expand Specific Solutions04 Adaptive motion planning and task execution frameworks
Mobile manipulation systems can incorporate adaptive motion planning algorithms that dynamically adjust to changing environmental conditions and task requirements. These frameworks utilize real-time sensor feedback and learning mechanisms to optimize manipulation strategies. The adaptive nature of these systems allows them to handle diverse manipulation scenarios without requiring extensive reprogramming, thereby providing flexibility in deployment across different applications.Expand Specific Solutions05 Reconfigurable hardware platforms for mobile manipulators
Designing mobile manipulation systems with reconfigurable hardware platforms enables physical adaptation to different task requirements. These platforms support the attachment and detachment of various end-effectors, sensors, and mobility bases according to specific application needs. The reconfigurable approach allows a single base system to be customized for multiple use cases, improving cost-effectiveness and operational flexibility while maintaining scalability for future enhancements.Expand Specific Solutions
Leading Companies in Mobile Manipulation Framework Space
The mobile manipulation frameworks sector represents a rapidly evolving technological landscape characterized by diverse industry participation and varying maturity levels. The market encompasses established industrial automation giants like KUKA Deutschland, Kawasaki Heavy Industries, and Daifuku, alongside technology leaders such as Microsoft Technology Licensing and Huawei Technologies, indicating strong commercial viability and cross-industry convergence. Research institutions including CNRS, DLR, and KIST Corp drive fundamental innovation, while specialized robotics companies like Tokyo Robotics focus on advanced manipulation solutions. The technology demonstrates moderate to high maturity in industrial applications, with companies like Canon and LG Electronics integrating manipulation capabilities into consumer and professional products. However, flexibility and scalability challenges persist, particularly in adaptive environments, suggesting the field remains in a growth phase with significant opportunities for breakthrough innovations in autonomous manipulation systems.
Microsoft Technology Licensing LLC
Technical Solution: Microsoft has developed mobile manipulation capabilities through their robotics initiatives, particularly focusing on cloud-connected robotic systems and AI-powered manipulation frameworks. Their approach leverages Azure cloud services for distributed computing and machine learning model deployment, enabling robots to perform complex manipulation tasks with cloud-enhanced intelligence. The framework incorporates computer vision services from Azure Cognitive Services and utilizes reinforcement learning algorithms for adaptive manipulation strategies. Microsoft's solution emphasizes scalability through cloud infrastructure, allowing multiple mobile robots to share learned behaviors and coordinate tasks across distributed environments. The platform supports integration with existing enterprise systems and provides comprehensive development tools through Visual Studio and Azure DevOps.
Strengths: Strong cloud integration and AI capabilities, excellent enterprise system compatibility. Weaknesses: Dependency on cloud connectivity, less focus on real-time critical applications.
Huawei Technologies Co., Ltd.
Technical Solution: Huawei has developed mobile manipulation frameworks as part of their intelligent robotics solutions, focusing on 5G-enabled and AI-powered robotic systems. Their approach integrates advanced communication technologies with robotic platforms, enabling ultra-low latency control and real-time data processing for mobile manipulation tasks. The framework incorporates Huawei's Ascend AI processors for on-device intelligence and supports edge computing architectures for distributed robotic systems. Their solution emphasizes network connectivity and multi-robot coordination, allowing fleets of mobile manipulators to work collaboratively in smart factory and logistics environments. The platform includes comprehensive software development kits and supports integration with Huawei's cloud services for enhanced scalability and remote monitoring capabilities.
Strengths: Advanced 5G connectivity and edge computing capabilities, strong multi-robot coordination features. Weaknesses: Ecosystem dependency on Huawei infrastructure, limited availability in some markets.
Core Technologies Enabling Framework Flexibility
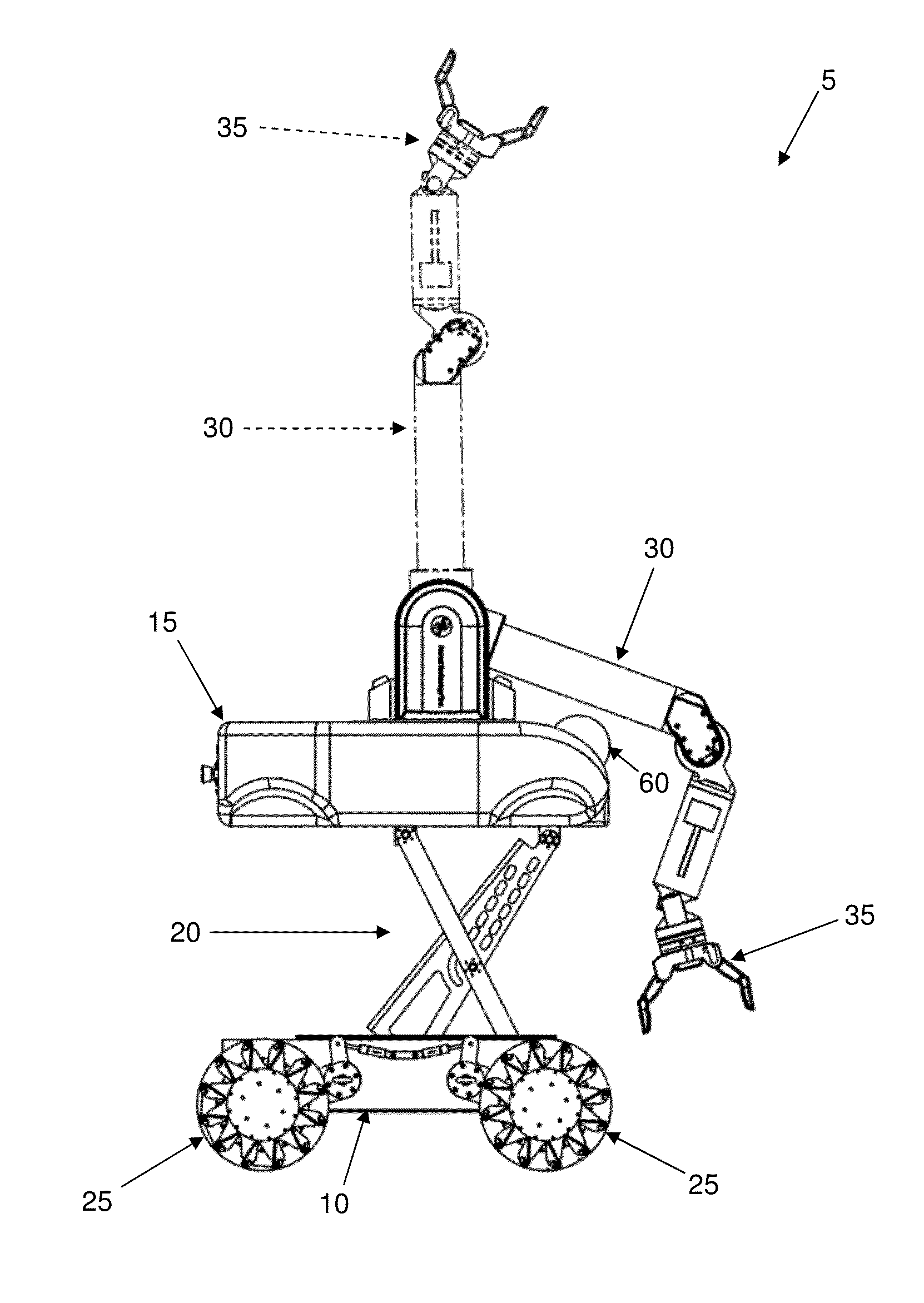
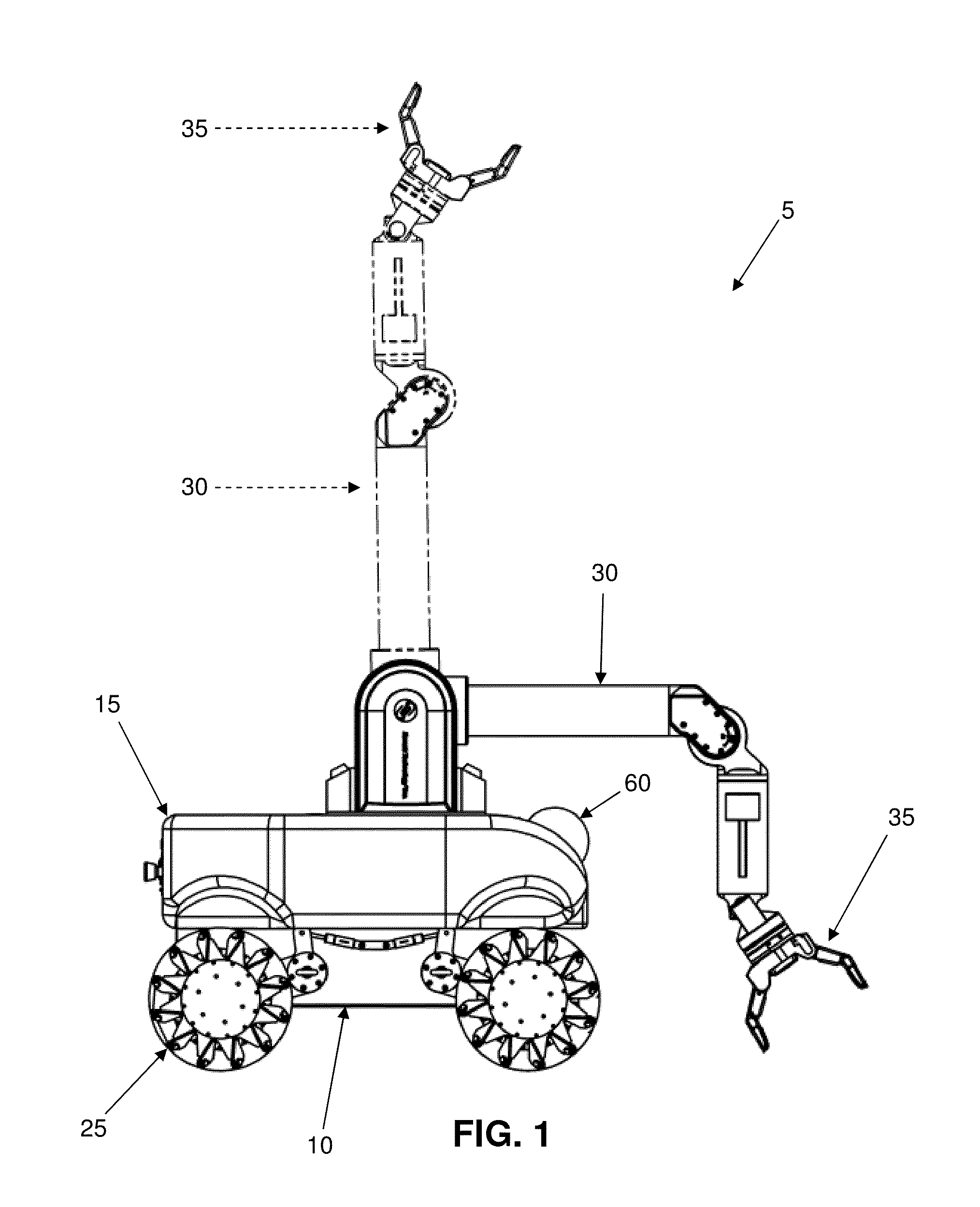
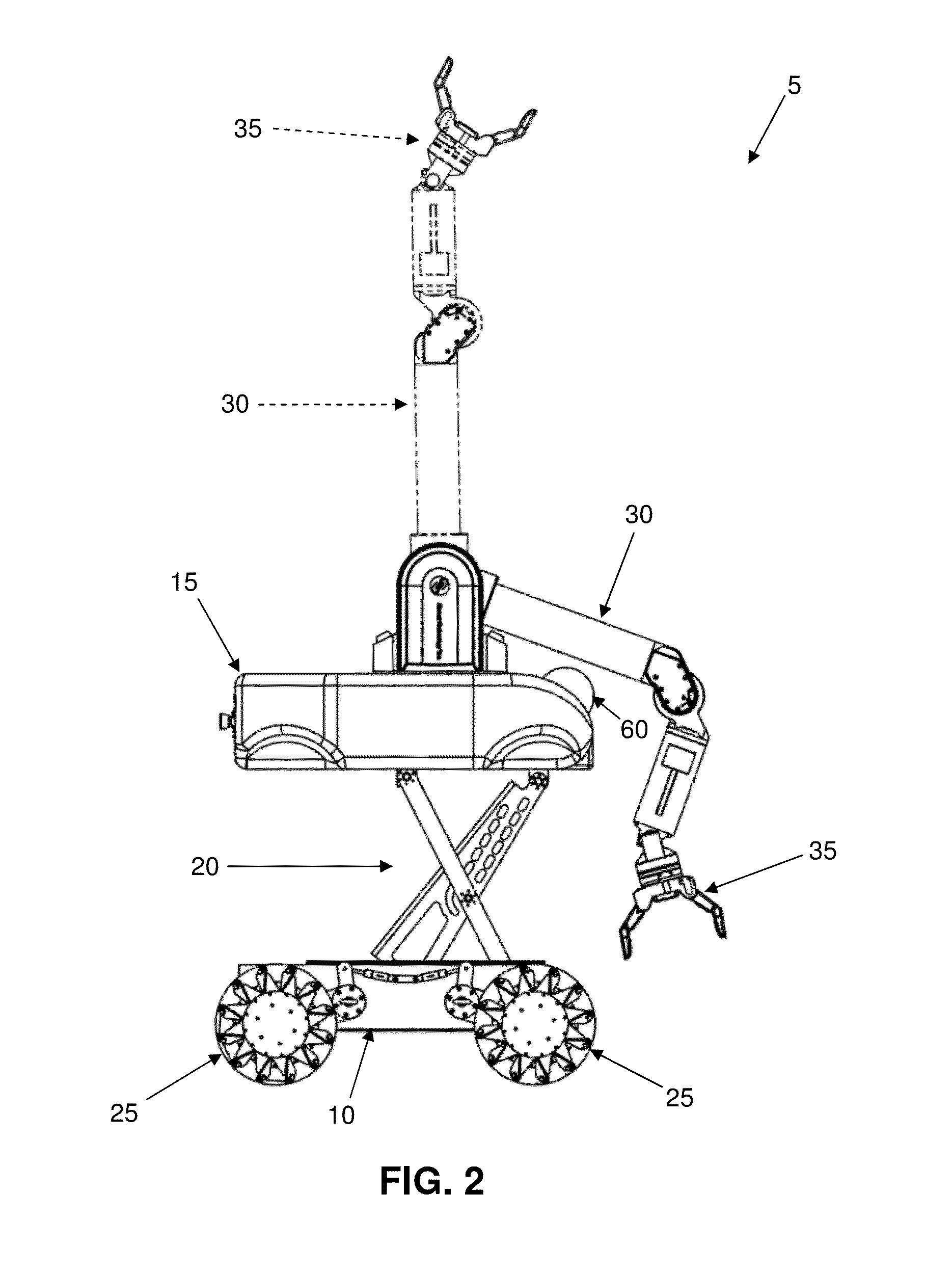
Mobile manipulation system with vertical lift
PatentInactiveUS20150050111A1
Innovation
- A mobile manipulation system with a mobile base equipped with an elevator mechanism, such as a scissors lift, that supports a platform with a robotic manipulator arm, allowing vertical movement to expand the system's reach from floor to overhead cabinets.

Stackable module robot
PatentWO2020222570A1
Innovation
- A stacked module robot design where detachable and electrically connectable modules, including a base module, intermediate modules, and a top module, can be combined and rearranged to meet specific user needs, featuring a power control unit, sensor unit, and manipulator unit, allowing for easy assembly and maintenance.




Safety Standards for Mobile Manipulation Systems
Safety standards for mobile manipulation systems represent a critical foundation for the widespread deployment of these technologies across industrial, healthcare, and service environments. The complexity of combining mobile platforms with manipulator arms creates unique safety challenges that require comprehensive regulatory frameworks addressing both individual component safety and system-level integration risks.
Current international safety standards primarily build upon established robotics safety frameworks, with ISO 10218 for industrial manipulators and ISO 3691-4 for automated guided vehicles serving as foundational references. However, the integration of these systems necessitates additional considerations, leading to the development of specialized standards such as ISO/TS 15066 for collaborative robots and emerging guidelines specifically targeting mobile manipulation platforms.
The European Union's Machinery Directive 2006/42/EC provides overarching safety requirements, mandating risk assessment procedures and safety-by-design principles. Similarly, ANSI/RIA R15.08 in North America establishes comprehensive safety requirements for mobile manipulator systems, emphasizing hazard identification, risk reduction strategies, and validation procedures. These standards require manufacturers to implement multiple safety layers including emergency stop systems, collision avoidance mechanisms, and fail-safe operational modes.
Key safety considerations encompass workspace monitoring through advanced sensor fusion, dynamic risk assessment algorithms, and human-robot interaction protocols. Standards mandate the implementation of safety-rated sensors, redundant control systems, and predictable emergency behaviors. Particular attention is given to transition zones where mobile platforms navigate while manipulators operate, requiring sophisticated coordination algorithms and enhanced situational awareness capabilities.
Certification processes typically involve third-party validation of safety functions, comprehensive testing under various operational scenarios, and documentation of safety-related software according to IEC 61508 functional safety standards. The certification framework also addresses cybersecurity aspects, recognizing that connected mobile manipulation systems face additional vulnerabilities that could compromise physical safety.
Emerging standards development focuses on adaptive safety systems that can adjust protection levels based on environmental context and task requirements, reflecting the growing sophistication of mobile manipulation applications and their integration into dynamic, human-populated environments.
Current international safety standards primarily build upon established robotics safety frameworks, with ISO 10218 for industrial manipulators and ISO 3691-4 for automated guided vehicles serving as foundational references. However, the integration of these systems necessitates additional considerations, leading to the development of specialized standards such as ISO/TS 15066 for collaborative robots and emerging guidelines specifically targeting mobile manipulation platforms.
The European Union's Machinery Directive 2006/42/EC provides overarching safety requirements, mandating risk assessment procedures and safety-by-design principles. Similarly, ANSI/RIA R15.08 in North America establishes comprehensive safety requirements for mobile manipulator systems, emphasizing hazard identification, risk reduction strategies, and validation procedures. These standards require manufacturers to implement multiple safety layers including emergency stop systems, collision avoidance mechanisms, and fail-safe operational modes.
Key safety considerations encompass workspace monitoring through advanced sensor fusion, dynamic risk assessment algorithms, and human-robot interaction protocols. Standards mandate the implementation of safety-rated sensors, redundant control systems, and predictable emergency behaviors. Particular attention is given to transition zones where mobile platforms navigate while manipulators operate, requiring sophisticated coordination algorithms and enhanced situational awareness capabilities.
Certification processes typically involve third-party validation of safety functions, comprehensive testing under various operational scenarios, and documentation of safety-related software according to IEC 61508 functional safety standards. The certification framework also addresses cybersecurity aspects, recognizing that connected mobile manipulation systems face additional vulnerabilities that could compromise physical safety.
Emerging standards development focuses on adaptive safety systems that can adjust protection levels based on environmental context and task requirements, reflecting the growing sophistication of mobile manipulation applications and their integration into dynamic, human-populated environments.
Performance Benchmarking Methodologies for Frameworks
Establishing robust performance benchmarking methodologies is crucial for evaluating mobile manipulation frameworks across flexibility and scalability dimensions. Current benchmarking approaches face significant challenges in creating standardized metrics that accurately reflect real-world performance variations. The complexity of mobile manipulation systems, which integrate navigation, perception, and manipulation capabilities, necessitates multi-dimensional evaluation frameworks that can capture both individual component performance and system-level integration effectiveness.
Standardized benchmark suites have emerged as essential tools for framework comparison, with initiatives like the RoboCup@Home and Amazon Robotics Challenge providing structured evaluation environments. These benchmarks typically incorporate task completion rates, execution time metrics, and error recovery capabilities as primary performance indicators. However, existing methodologies often struggle to balance controlled laboratory conditions with realistic operational scenarios, leading to potential gaps between benchmark results and practical deployment performance.
Simulation-based benchmarking has gained prominence due to its ability to provide repeatable and scalable evaluation environments. Platforms such as Gazebo, PyBullet, and NVIDIA Isaac Sim enable comprehensive testing across diverse scenarios while maintaining computational efficiency. These simulation frameworks allow for systematic variation of environmental parameters, object properties, and task complexity, facilitating thorough scalability assessment. Nevertheless, the sim-to-real gap remains a persistent challenge, requiring careful validation of simulation results against physical system performance.
Real-world benchmarking methodologies complement simulation approaches by providing authentic performance validation. Field testing protocols typically involve structured task sequences in representative environments, measuring metrics such as success rates, adaptation time, and resource utilization. These methodologies often employ statistical analysis techniques to account for environmental variability and ensure result reliability across multiple trial runs.
Emerging benchmarking frameworks increasingly emphasize modularity and extensibility to accommodate diverse framework architectures. Component-level benchmarking allows for granular performance analysis of individual subsystems, while system-level evaluation assesses overall integration effectiveness. This hierarchical approach enables more precise identification of performance bottlenecks and optimization opportunities, supporting targeted framework improvements and informed selection decisions for specific application domains.
Standardized benchmark suites have emerged as essential tools for framework comparison, with initiatives like the RoboCup@Home and Amazon Robotics Challenge providing structured evaluation environments. These benchmarks typically incorporate task completion rates, execution time metrics, and error recovery capabilities as primary performance indicators. However, existing methodologies often struggle to balance controlled laboratory conditions with realistic operational scenarios, leading to potential gaps between benchmark results and practical deployment performance.
Simulation-based benchmarking has gained prominence due to its ability to provide repeatable and scalable evaluation environments. Platforms such as Gazebo, PyBullet, and NVIDIA Isaac Sim enable comprehensive testing across diverse scenarios while maintaining computational efficiency. These simulation frameworks allow for systematic variation of environmental parameters, object properties, and task complexity, facilitating thorough scalability assessment. Nevertheless, the sim-to-real gap remains a persistent challenge, requiring careful validation of simulation results against physical system performance.
Real-world benchmarking methodologies complement simulation approaches by providing authentic performance validation. Field testing protocols typically involve structured task sequences in representative environments, measuring metrics such as success rates, adaptation time, and resource utilization. These methodologies often employ statistical analysis techniques to account for environmental variability and ensure result reliability across multiple trial runs.
Emerging benchmarking frameworks increasingly emphasize modularity and extensibility to accommodate diverse framework architectures. Component-level benchmarking allows for granular performance analysis of individual subsystems, while system-level evaluation assesses overall integration effectiveness. This hierarchical approach enables more precise identification of performance bottlenecks and optimization opportunities, supporting targeted framework improvements and informed selection decisions for specific application domains.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!