

Mobile Manipulation vs Robotic Arms: Space Utilization
APR 24, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Mobile Manipulation vs Fixed Arms Background and Objectives
The evolution of robotic manipulation systems has been fundamentally shaped by the persistent challenge of optimizing workspace utilization while maintaining operational efficiency. Traditional fixed robotic arms, despite their precision and reliability, have inherently limited reach and workspace coverage, constraining their deployment in dynamic industrial environments. This limitation has driven the emergence of mobile manipulation platforms that combine locomotion capabilities with articulated manipulation, representing a paradigm shift in robotic system design.
Mobile manipulation technology emerged from the convergence of autonomous navigation systems and traditional robotic manipulation, addressing critical spatial constraints that have long plagued industrial automation. The integration of mobile bases with robotic arms enables unprecedented workspace expansion, allowing single systems to operate across multiple workstations and adapt to varying spatial configurations. This technological fusion has evolved from early research prototypes in the 1990s to sophisticated commercial platforms capable of complex multi-modal operations.
The fundamental objective driving mobile manipulation development centers on maximizing spatial efficiency while maintaining manipulation precision. Unlike fixed installations that require dedicated workspace allocation and complex conveyor systems to bring tasks within reach, mobile manipulators can dynamically reposition themselves to optimize task execution. This capability addresses the growing demand for flexible manufacturing systems that can adapt to changing production requirements without extensive infrastructure modifications.
Current technological objectives focus on achieving seamless integration between navigation and manipulation subsystems while optimizing space utilization metrics. Key performance indicators include workspace coverage ratios, task completion efficiency across distributed locations, and the ability to operate in constrained environments where fixed systems would be impractical. Advanced mobile manipulation systems aim to achieve manipulation precision comparable to fixed arms while providing orders of magnitude greater workspace coverage.
The strategic importance of space utilization optimization extends beyond mere operational efficiency to encompass fundamental questions of system scalability and economic viability. As manufacturing facilities face increasing pressure to maximize throughput within existing footprints, the ability to deploy fewer, more versatile robotic systems becomes increasingly valuable. Mobile manipulation platforms promise to transform traditional automation paradigms by enabling single systems to replace multiple fixed installations while providing enhanced operational flexibility and reduced infrastructure requirements.
Mobile manipulation technology emerged from the convergence of autonomous navigation systems and traditional robotic manipulation, addressing critical spatial constraints that have long plagued industrial automation. The integration of mobile bases with robotic arms enables unprecedented workspace expansion, allowing single systems to operate across multiple workstations and adapt to varying spatial configurations. This technological fusion has evolved from early research prototypes in the 1990s to sophisticated commercial platforms capable of complex multi-modal operations.
The fundamental objective driving mobile manipulation development centers on maximizing spatial efficiency while maintaining manipulation precision. Unlike fixed installations that require dedicated workspace allocation and complex conveyor systems to bring tasks within reach, mobile manipulators can dynamically reposition themselves to optimize task execution. This capability addresses the growing demand for flexible manufacturing systems that can adapt to changing production requirements without extensive infrastructure modifications.
Current technological objectives focus on achieving seamless integration between navigation and manipulation subsystems while optimizing space utilization metrics. Key performance indicators include workspace coverage ratios, task completion efficiency across distributed locations, and the ability to operate in constrained environments where fixed systems would be impractical. Advanced mobile manipulation systems aim to achieve manipulation precision comparable to fixed arms while providing orders of magnitude greater workspace coverage.
The strategic importance of space utilization optimization extends beyond mere operational efficiency to encompass fundamental questions of system scalability and economic viability. As manufacturing facilities face increasing pressure to maximize throughput within existing footprints, the ability to deploy fewer, more versatile robotic systems becomes increasingly valuable. Mobile manipulation platforms promise to transform traditional automation paradigms by enabling single systems to replace multiple fixed installations while providing enhanced operational flexibility and reduced infrastructure requirements.
Market Demand for Space-Efficient Robotic Solutions
The global robotics market is experiencing unprecedented growth driven by increasing demands for automation across manufacturing, logistics, healthcare, and service industries. Space constraints in modern facilities have become a critical factor influencing robotic system selection, as organizations seek to maximize operational efficiency within limited physical footprints. Traditional industrial environments, urban warehouses, and compact manufacturing cells are driving the need for robotics solutions that can deliver high performance while minimizing spatial requirements.
Manufacturing facilities worldwide are facing mounting pressure to increase productivity while operating in increasingly constrained spaces. Urban real estate costs continue to rise, forcing manufacturers to optimize every square meter of their production floors. This spatial optimization challenge has created substantial market demand for robotic solutions that can perform complex tasks without requiring extensive workspace allocation. The automotive, electronics, and consumer goods sectors are particularly focused on space-efficient automation solutions.
The logistics and warehousing industry represents another significant demand driver for space-optimized robotic systems. E-commerce growth has intensified the need for automated fulfillment centers that can handle diverse product ranges within compact urban distribution facilities. Mobile manipulation systems are gaining traction in these environments due to their ability to navigate narrow aisles and adapt to changing warehouse layouts without requiring fixed infrastructure modifications.
Healthcare and laboratory environments present unique spatial constraints that traditional robotic arms struggle to address effectively. Surgical suites, pharmaceutical clean rooms, and research laboratories require robotic assistance within sterile, confined spaces where flexibility and minimal footprint are paramount. The aging population and increasing demand for precision medical procedures are amplifying the need for space-efficient robotic solutions in healthcare settings.
Small and medium enterprises represent an emerging market segment with distinct space utilization requirements. These organizations often operate in multi-purpose facilities where robotic systems must coexist with human workers and other equipment in limited spaces. The demand for affordable, space-efficient automation solutions among SMEs is creating new market opportunities for compact robotic systems that can deliver industrial-grade performance without requiring dedicated operational areas.
The service robotics sector is experiencing rapid expansion in hospitality, retail, and commercial cleaning applications. These environments typically feature dynamic layouts with obstacles, narrow passages, and varying spatial configurations that favor mobile manipulation platforms over fixed robotic installations. Market demand in this sector emphasizes versatility and spatial adaptability over pure performance metrics.
Manufacturing facilities worldwide are facing mounting pressure to increase productivity while operating in increasingly constrained spaces. Urban real estate costs continue to rise, forcing manufacturers to optimize every square meter of their production floors. This spatial optimization challenge has created substantial market demand for robotic solutions that can perform complex tasks without requiring extensive workspace allocation. The automotive, electronics, and consumer goods sectors are particularly focused on space-efficient automation solutions.
The logistics and warehousing industry represents another significant demand driver for space-optimized robotic systems. E-commerce growth has intensified the need for automated fulfillment centers that can handle diverse product ranges within compact urban distribution facilities. Mobile manipulation systems are gaining traction in these environments due to their ability to navigate narrow aisles and adapt to changing warehouse layouts without requiring fixed infrastructure modifications.
Healthcare and laboratory environments present unique spatial constraints that traditional robotic arms struggle to address effectively. Surgical suites, pharmaceutical clean rooms, and research laboratories require robotic assistance within sterile, confined spaces where flexibility and minimal footprint are paramount. The aging population and increasing demand for precision medical procedures are amplifying the need for space-efficient robotic solutions in healthcare settings.
Small and medium enterprises represent an emerging market segment with distinct space utilization requirements. These organizations often operate in multi-purpose facilities where robotic systems must coexist with human workers and other equipment in limited spaces. The demand for affordable, space-efficient automation solutions among SMEs is creating new market opportunities for compact robotic systems that can deliver industrial-grade performance without requiring dedicated operational areas.
The service robotics sector is experiencing rapid expansion in hospitality, retail, and commercial cleaning applications. These environments typically feature dynamic layouts with obstacles, narrow passages, and varying spatial configurations that favor mobile manipulation platforms over fixed robotic installations. Market demand in this sector emphasizes versatility and spatial adaptability over pure performance metrics.
Current State and Space Constraints in Robotic Systems
The contemporary robotic landscape presents a fundamental dichotomy between mobile manipulation systems and traditional fixed robotic arms, each addressing space utilization challenges through distinct operational paradigms. Current industrial environments predominantly rely on stationary robotic arms mounted on fixed bases, which offer exceptional precision and payload capacity within their defined workspace envelopes. These systems typically operate within spherical or cylindrical work zones, with reach limitations directly correlating to arm length and joint configurations.
Traditional robotic arms face significant spatial constraints due to their fixed positioning requirements. Manufacturing facilities must allocate substantial floor space for robot installation, safety barriers, and maintenance access corridors. The workspace-to-footprint ratio often proves inefficient, particularly in applications requiring coverage of large or distributed work areas. Collision avoidance with surrounding infrastructure further restricts effective operational volumes, creating dead zones where productivity suffers.
Mobile manipulation platforms have emerged as a response to these spatial limitations, integrating robotic arms with autonomous mobile bases. Current implementations include wheeled platforms, tracked vehicles, and increasingly, legged systems that navigate complex terrains. These hybrid systems extend operational reach beyond fixed workspace boundaries, enabling single robots to service multiple stations or adapt to dynamic production layouts.
However, mobile manipulation introduces new spatial challenges. Navigation corridors must accommodate robot dimensions and turning radii, while charging stations and storage areas require dedicated space allocation. Current systems often struggle with the trade-off between mobility and stability, as mobile bases typically cannot match the rigidity and precision of fixed installations during manipulation tasks.
Space constraints in modern robotic deployments are further complicated by safety regulations requiring human-robot separation zones. Collaborative robots have partially addressed this through force-limiting technologies, but spatial efficiency remains compromised by mandatory safety buffers. Current sensing technologies, including LiDAR and vision systems, enable dynamic space monitoring but add complexity and computational overhead.
The integration density of robotic systems continues to increase, with current facilities achieving robot-to-floor-area ratios previously considered impractical. Advanced path planning algorithms now optimize multi-robot coordination within shared spaces, though interference and deadlock scenarios remain persistent challenges requiring sophisticated traffic management systems.
Traditional robotic arms face significant spatial constraints due to their fixed positioning requirements. Manufacturing facilities must allocate substantial floor space for robot installation, safety barriers, and maintenance access corridors. The workspace-to-footprint ratio often proves inefficient, particularly in applications requiring coverage of large or distributed work areas. Collision avoidance with surrounding infrastructure further restricts effective operational volumes, creating dead zones where productivity suffers.
Mobile manipulation platforms have emerged as a response to these spatial limitations, integrating robotic arms with autonomous mobile bases. Current implementations include wheeled platforms, tracked vehicles, and increasingly, legged systems that navigate complex terrains. These hybrid systems extend operational reach beyond fixed workspace boundaries, enabling single robots to service multiple stations or adapt to dynamic production layouts.
However, mobile manipulation introduces new spatial challenges. Navigation corridors must accommodate robot dimensions and turning radii, while charging stations and storage areas require dedicated space allocation. Current systems often struggle with the trade-off between mobility and stability, as mobile bases typically cannot match the rigidity and precision of fixed installations during manipulation tasks.
Space constraints in modern robotic deployments are further complicated by safety regulations requiring human-robot separation zones. Collaborative robots have partially addressed this through force-limiting technologies, but spatial efficiency remains compromised by mandatory safety buffers. Current sensing technologies, including LiDAR and vision systems, enable dynamic space monitoring but add complexity and computational overhead.
The integration density of robotic systems continues to increase, with current facilities achieving robot-to-floor-area ratios previously considered impractical. Advanced path planning algorithms now optimize multi-robot coordination within shared spaces, though interference and deadlock scenarios remain persistent challenges requiring sophisticated traffic management systems.
Existing Space Optimization Solutions in Robotics
01 Compact robotic arm designs for space-constrained environments
Robotic arms designed with compact configurations and folding mechanisms enable efficient operation in limited spaces. These designs incorporate joint arrangements and linkage systems that allow the arm to minimize its footprint when not in use while maintaining full operational capability. The compact structure is particularly useful for mobile platforms, warehouses, and confined industrial settings where space optimization is critical.- Compact robotic arm designs for space-constrained environments: Robotic arms designed with compact configurations and folding mechanisms enable efficient operation in limited spaces. These designs incorporate joint arrangements and linkage systems that allow the arm to minimize its footprint when not in use while maintaining full operational capability. The compact structure is particularly useful for mobile platforms where space is at a premium, such as mobile robots operating in narrow corridors or confined workspaces.
- Multi-degree-of-freedom manipulation systems for enhanced workspace coverage: Advanced manipulation systems utilize multiple degrees of freedom to maximize workspace coverage and reach capabilities. These systems combine articulated joints and rotational mechanisms that enable the robotic arm to access difficult-to-reach areas and perform complex manipulation tasks. The enhanced mobility allows for better space utilization by enabling a single robotic system to cover a larger operational area without requiring repositioning of the base platform.
- Mobile base integration with manipulator arms for dynamic workspace adaptation: Integration of robotic manipulators with mobile bases creates systems capable of dynamically adapting to different workspace requirements. The mobile platform provides locomotion capabilities while the mounted manipulator performs precision tasks, effectively extending the operational range. This combination optimizes space utilization by allowing the system to navigate to task locations rather than requiring fixed installation in multiple locations.
- Collision avoidance and path planning for safe operation in cluttered spaces: Advanced control systems incorporate collision avoidance algorithms and intelligent path planning to enable safe operation in cluttered or constrained environments. These systems use sensor feedback and computational methods to detect obstacles and plan optimal trajectories that maximize task efficiency while minimizing the risk of collisions. Such capabilities are essential for mobile manipulation systems operating in dynamic environments with limited clearance.
- Modular and reconfigurable arm architectures for versatile space utilization: Modular robotic arm designs allow for reconfiguration based on specific task requirements and spatial constraints. These architectures feature interchangeable components and adjustable link lengths that can be customized for different applications. The flexibility in configuration enables optimal space utilization across diverse operational scenarios, from tight indoor environments to more open industrial settings.
02 Mobile base integration with manipulator systems
Integration of robotic manipulators with mobile platforms enables dynamic workspace utilization and extended operational range. These systems combine locomotion capabilities with manipulation functions, allowing robots to navigate to different locations and perform tasks across larger areas. The mobile base provides stability and positioning while the manipulator performs precision operations, optimizing overall space usage in dynamic environments.Expand Specific Solutions03 Collision avoidance and path planning in constrained spaces
Advanced control systems enable robotic arms to operate safely in cluttered environments through real-time collision detection and optimized trajectory planning. These systems utilize sensors and algorithms to map the surrounding space, predict potential collisions, and adjust movement paths accordingly. This technology allows manipulators to work efficiently in tight spaces while avoiding obstacles and maintaining safe distances from humans and equipment.Expand Specific Solutions04 Multi-degree-of-freedom articulation for workspace optimization
Robotic arms with enhanced degrees of freedom and flexible joint configurations maximize reachability within limited spaces. These designs incorporate multiple articulation points that allow the arm to access difficult-to-reach areas and operate around obstacles. The increased flexibility enables the manipulator to maintain optimal positioning and orientation throughout its workspace, improving efficiency in space-constrained applications.Expand Specific Solutions05 Modular and reconfigurable manipulator architectures
Modular robotic arm systems allow for customizable configurations that can be adapted to specific space requirements and task demands. These architectures feature interchangeable components and adjustable link lengths that enable users to optimize the manipulator's form factor for different applications. The reconfigurable nature allows the same system to be deployed in various spatial constraints while maintaining functionality and performance.Expand Specific Solutions
Key Players in Mobile Robotics and Robotic Arms Industry
The mobile manipulation versus robotic arms space utilization market represents a rapidly evolving sector within industrial automation, currently in its growth phase with significant technological differentiation emerging. The market demonstrates substantial expansion potential as industries seek flexible automation solutions that optimize workspace efficiency. Technology maturity varies considerably across key players, with established robotics companies like KUKA Deutschland, Kawasaki Heavy Industries, and Honda Motor leading in traditional robotic arm development, while newer entrants such as Tokyo Robotics, CMR Surgical, and Auris Health are pioneering advanced mobile manipulation systems. Companies like Intel and TDK provide critical enabling technologies, while regional players including Ankobot and various Chinese firms are accelerating innovation in space-efficient robotic solutions, creating a competitive landscape where mobility and spatial optimization are becoming key differentiators.
iRobot Corp.
Technical Solution: iRobot has developed mobile manipulation solutions primarily focused on service robotics applications, where space utilization is critical for deployment in residential and commercial environments. Their approach combines autonomous navigation with lightweight manipulation capabilities, creating systems that can operate effectively in spaces where traditional robotic arms would be impractical due to space constraints. The company's mobile manipulators utilize compact form factors and intelligent space mapping to optimize their operational footprint, allowing them to work in environments with limited available space. Their technology emphasizes adaptive workspace utilization, where the mobile platform can position itself optimally for manipulation tasks while minimizing interference with human activities and environmental obstacles. iRobot's systems demonstrate efficient space usage through their ability to fold and reconfigure manipulation components when not in active use.
Strengths: Proven autonomous navigation technology, cost-effective solutions for service applications. Weaknesses: Limited manipulation precision compared to industrial robotic arms, restricted payload handling capabilities.
Honda Motor Co., Ltd.
Technical Solution: Honda has pioneered humanoid mobile manipulation through their ASIMO and subsequent robotic platforms, focusing on space-efficient operation in human environments. Their approach emphasizes compact mobile manipulators that can operate in spaces designed for humans, utilizing advanced balance control and multi-degree-of-freedom manipulation capabilities. Honda's mobile manipulation systems are designed to work in constrained spaces typical of domestic and office environments, where traditional robotic arms would require dedicated workspace allocation. The company's technology integrates sophisticated spatial awareness algorithms that allow their mobile manipulators to optimize their positioning and movement patterns to minimize space requirements while maintaining operational effectiveness. Their systems demonstrate superior space utilization through dynamic reconfiguration capabilities and human-like manipulation strategies.
Strengths: Excellent human-robot interaction capabilities, superior mobility in constrained spaces designed for humans. Weaknesses: Limited payload capacity compared to industrial robotic arms, higher complexity in control systems.
Core Innovations in Mobile Base and Arm Integration
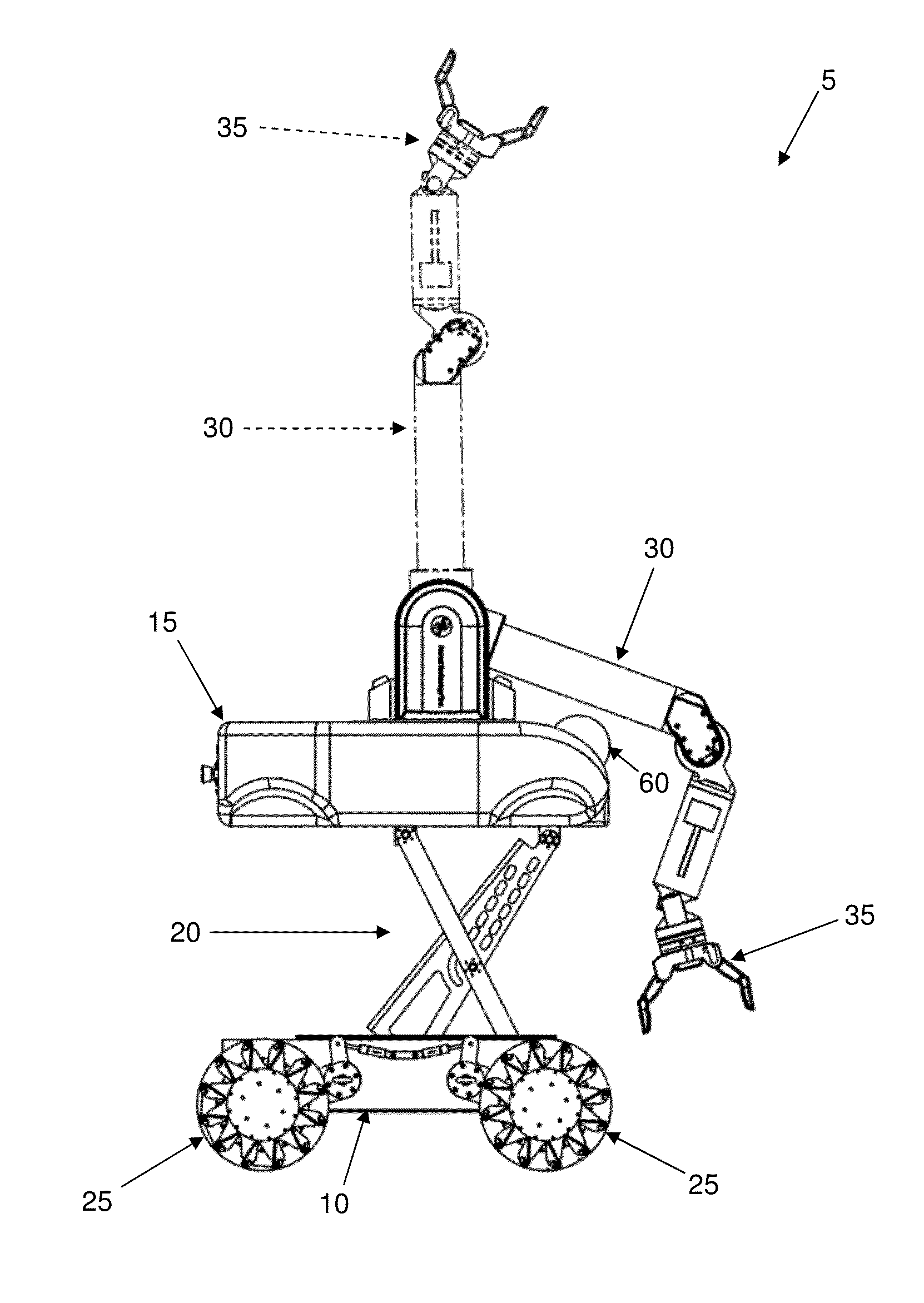
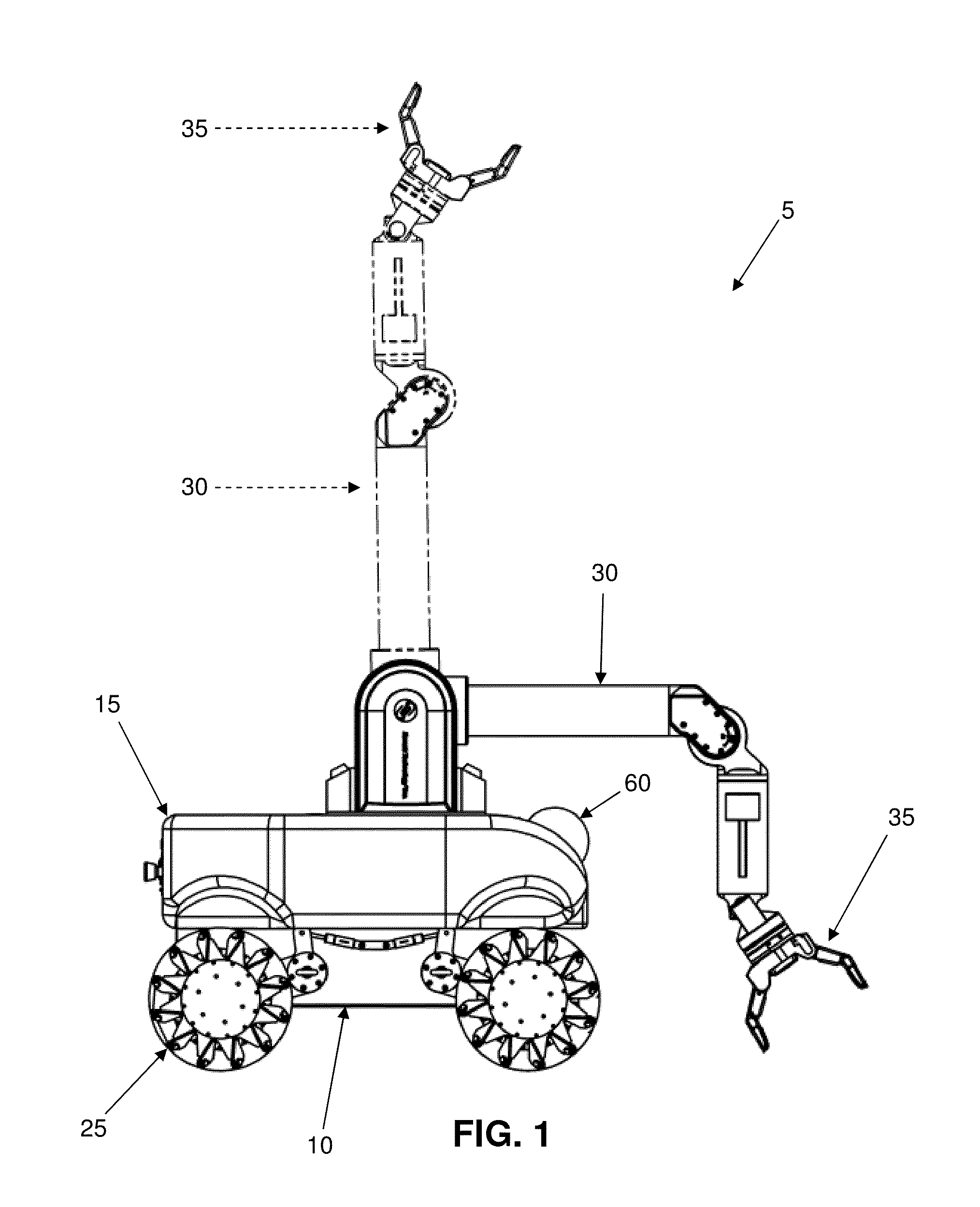
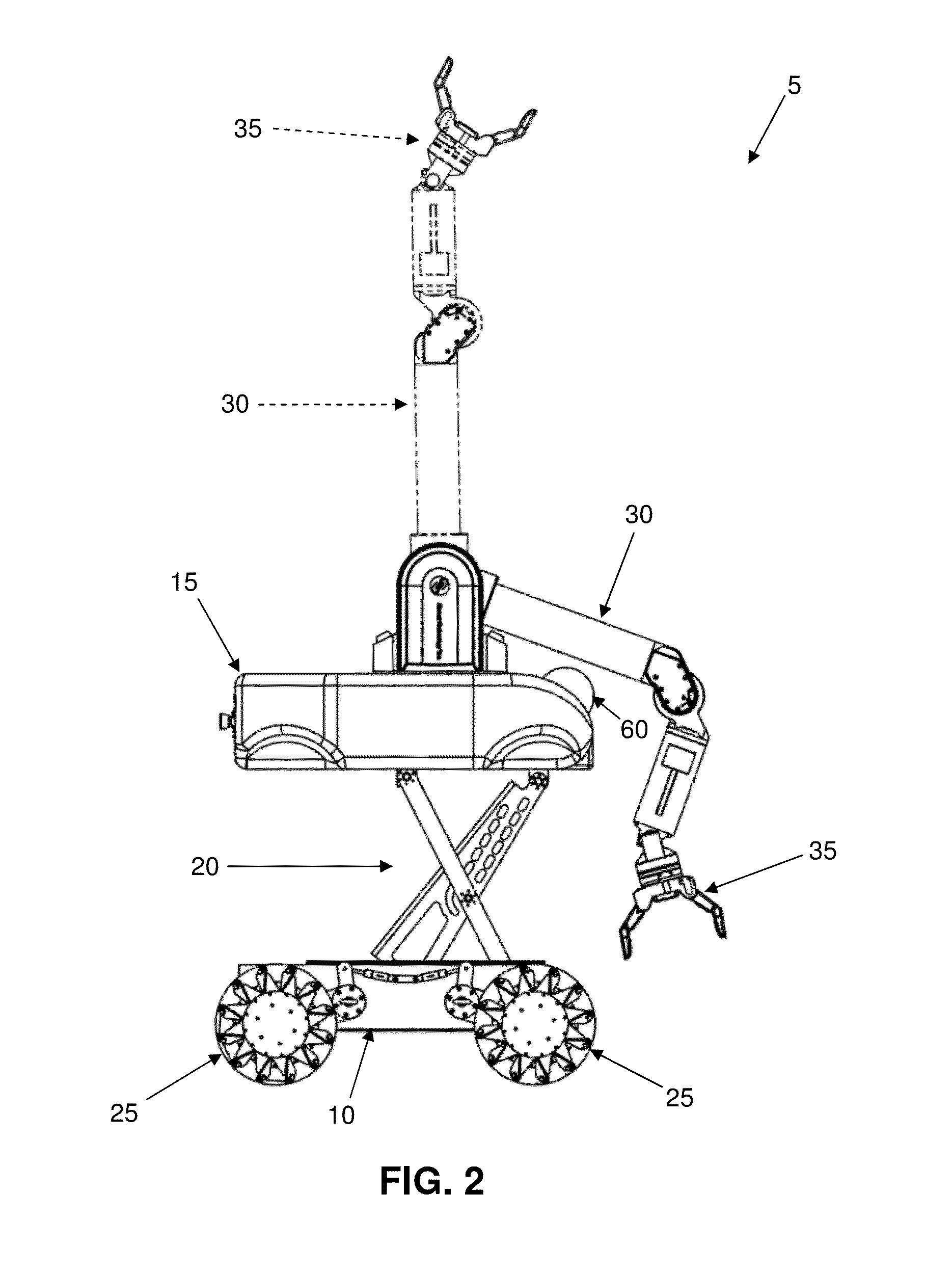
Mobile manipulation system with vertical lift
PatentInactiveUS20150050111A1
Innovation
- A mobile manipulation system with a mobile base equipped with an elevator mechanism, such as a scissors lift, that supports a platform with a robotic manipulator arm, allowing vertical movement to expand the system's reach from floor to overhead cabinets.

Mobile manipulator and method of controlling the same
PatentInactiveUS20240123612A1
Innovation
- A mobile manipulator system featuring a base unit with a rail and an arm unit with multi-joints, utilizing adaptive neural network-based compensation control and radial basis function neural networks to adjust the center of gravity and maintain balance, along with weight blocks to ensure stability, allowing precise positional shifts and payload adjustments.




Safety Standards for Mobile Manipulation Systems
Safety standards for mobile manipulation systems represent a critical framework that addresses the unique challenges posed by combining mobility and manipulation capabilities in robotic platforms. Unlike traditional fixed robotic arms that operate within well-defined workspaces, mobile manipulators introduce dynamic spatial considerations that require comprehensive safety protocols to protect both human operators and surrounding environments.
The International Organization for Standardization (ISO) has established several key standards that directly impact mobile manipulation systems, including ISO 10218 for industrial robots and ISO 13482 for personal care robots. These standards emphasize risk assessment methodologies that account for the expanded operational envelope of mobile platforms. The European Committee for Standardization (CEN) has also contributed through EN ISO 12100, which provides fundamental safety principles applicable to mobile manipulation systems operating in shared human-robot environments.
Collision avoidance represents a primary safety concern, requiring real-time sensor integration and predictive algorithms to prevent contact with humans, obstacles, or other equipment. Safety standards mandate multiple layers of protection, including emergency stop systems, speed limitations based on proximity to humans, and fail-safe mechanisms that ensure safe system shutdown. The standards specify minimum detection ranges and response times for various operational scenarios.
Workspace monitoring protocols must address the dynamic nature of mobile manipulation systems, where the effective workspace changes continuously as the platform moves. Safety standards require real-time boundary detection and adaptive safety zones that expand or contract based on the manipulator's configuration and the mobile base's position. These protocols must account for the system's momentum and stopping distances when operating at various speeds.
Human-robot interaction safety becomes particularly complex in mobile manipulation scenarios, where traditional safety barriers are impractical. Standards emphasize collaborative operation modes with reduced force and speed limits, advanced sensor fusion for human detection and tracking, and intuitive emergency stop mechanisms accessible from multiple locations. The standards also address communication protocols between mobile manipulators and other automated systems to prevent conflicts in shared operational spaces.
Certification processes for mobile manipulation systems require comprehensive testing across diverse operational scenarios, including navigation in cluttered environments, manipulation tasks at various heights and orientations, and emergency response procedures. These standards continue evolving to address emerging applications in logistics, healthcare, and service industries where mobile manipulation systems operate in increasingly complex and unpredictable environments.
The International Organization for Standardization (ISO) has established several key standards that directly impact mobile manipulation systems, including ISO 10218 for industrial robots and ISO 13482 for personal care robots. These standards emphasize risk assessment methodologies that account for the expanded operational envelope of mobile platforms. The European Committee for Standardization (CEN) has also contributed through EN ISO 12100, which provides fundamental safety principles applicable to mobile manipulation systems operating in shared human-robot environments.
Collision avoidance represents a primary safety concern, requiring real-time sensor integration and predictive algorithms to prevent contact with humans, obstacles, or other equipment. Safety standards mandate multiple layers of protection, including emergency stop systems, speed limitations based on proximity to humans, and fail-safe mechanisms that ensure safe system shutdown. The standards specify minimum detection ranges and response times for various operational scenarios.
Workspace monitoring protocols must address the dynamic nature of mobile manipulation systems, where the effective workspace changes continuously as the platform moves. Safety standards require real-time boundary detection and adaptive safety zones that expand or contract based on the manipulator's configuration and the mobile base's position. These protocols must account for the system's momentum and stopping distances when operating at various speeds.
Human-robot interaction safety becomes particularly complex in mobile manipulation scenarios, where traditional safety barriers are impractical. Standards emphasize collaborative operation modes with reduced force and speed limits, advanced sensor fusion for human detection and tracking, and intuitive emergency stop mechanisms accessible from multiple locations. The standards also address communication protocols between mobile manipulators and other automated systems to prevent conflicts in shared operational spaces.
Certification processes for mobile manipulation systems require comprehensive testing across diverse operational scenarios, including navigation in cluttered environments, manipulation tasks at various heights and orientations, and emergency response procedures. These standards continue evolving to address emerging applications in logistics, healthcare, and service industries where mobile manipulation systems operate in increasingly complex and unpredictable environments.
Cost-Benefit Analysis of Mobile vs Fixed Robotic Solutions
The economic evaluation of mobile versus fixed robotic solutions reveals significant differences in initial capital expenditure, operational costs, and long-term return on investment. Fixed robotic arms typically require lower upfront investment, with industrial-grade units ranging from $50,000 to $200,000 depending on payload capacity and precision requirements. However, mobile manipulation systems command premium pricing between $150,000 to $500,000 due to their integrated navigation, perception, and manipulation capabilities.
Operational cost structures differ substantially between these approaches. Fixed systems demonstrate lower maintenance requirements and energy consumption per task cycle, benefiting from stable mounting and predictable wear patterns. Mobile platforms incur additional costs through battery replacement, wheel maintenance, and sensor calibration, with annual maintenance costs typically 15-20% higher than stationary counterparts.
Space utilization efficiency directly impacts cost-effectiveness calculations. Mobile systems eliminate the need for extensive conveyor networks and material handling infrastructure, potentially saving $100,000 to $300,000 in facility modifications. This advantage becomes particularly pronounced in existing facilities where retrofitting fixed automation would require significant structural changes or production line reconfiguration.
Labor cost implications vary based on deployment scenarios. Mobile robots can service multiple workstations with a single operator oversight, achieving labor cost reductions of 30-40% in multi-station environments. Fixed systems excel in high-throughput single-station applications, delivering superior cycle time performance and consistent quality metrics that translate to higher per-unit profitability.
Return on investment timelines typically favor mobile solutions in flexible manufacturing environments with frequent product changeovers, achieving payback periods of 18-24 months. Fixed systems demonstrate faster ROI in dedicated production lines with stable product portfolios, often reaching break-even within 12-18 months through higher throughput rates and lower operational complexity.
Risk assessment reveals mobile systems carry higher technological obsolescence risks due to rapidly evolving autonomous navigation technologies, while fixed systems offer greater long-term stability and predictable depreciation schedules for financial planning purposes.
Operational cost structures differ substantially between these approaches. Fixed systems demonstrate lower maintenance requirements and energy consumption per task cycle, benefiting from stable mounting and predictable wear patterns. Mobile platforms incur additional costs through battery replacement, wheel maintenance, and sensor calibration, with annual maintenance costs typically 15-20% higher than stationary counterparts.
Space utilization efficiency directly impacts cost-effectiveness calculations. Mobile systems eliminate the need for extensive conveyor networks and material handling infrastructure, potentially saving $100,000 to $300,000 in facility modifications. This advantage becomes particularly pronounced in existing facilities where retrofitting fixed automation would require significant structural changes or production line reconfiguration.
Labor cost implications vary based on deployment scenarios. Mobile robots can service multiple workstations with a single operator oversight, achieving labor cost reductions of 30-40% in multi-station environments. Fixed systems excel in high-throughput single-station applications, delivering superior cycle time performance and consistent quality metrics that translate to higher per-unit profitability.
Return on investment timelines typically favor mobile solutions in flexible manufacturing environments with frequent product changeovers, achieving payback periods of 18-24 months. Fixed systems demonstrate faster ROI in dedicated production lines with stable product portfolios, often reaching break-even within 12-18 months through higher throughput rates and lower operational complexity.
Risk assessment reveals mobile systems carry higher technological obsolescence risks due to rapidly evolving autonomous navigation technologies, while fixed systems offer greater long-term stability and predictable depreciation schedules for financial planning purposes.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!