

Mobile Manipulation vs Drone Technology: Application Potential
APR 24, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Mobile Manipulation vs Drone Tech Background and Objectives
Mobile manipulation and drone technology represent two distinct yet increasingly convergent paradigms in robotics and autonomous systems. Mobile manipulation combines robotic mobility platforms with articulated manipulator arms, enabling robots to navigate environments while performing complex manipulation tasks. This technology has evolved from early industrial applications to sophisticated systems capable of operating in unstructured environments, driven by advances in simultaneous localization and mapping (SLAM), computer vision, and adaptive control algorithms.
Drone technology, encompassing unmanned aerial vehicles (UAVs) and unmanned aerial systems (UAS), has experienced exponential growth from military origins to widespread civilian applications. The integration of advanced flight control systems, miniaturized sensors, and artificial intelligence has transformed drones from simple remote-controlled aircraft to autonomous platforms capable of complex mission execution. Recent developments in aerial manipulation have begun bridging the gap between traditional drone capabilities and mobile manipulation concepts.
The convergence of these technologies is creating new possibilities for applications requiring both mobility and manipulation capabilities across three-dimensional spaces. This intersection is particularly relevant as industries seek solutions that can operate in challenging environments where traditional ground-based or purely aerial systems face limitations. The combination offers potential advantages in accessibility, operational flexibility, and task versatility.
Current technological objectives focus on developing hybrid systems that leverage the strengths of both approaches while mitigating their respective limitations. Key development goals include enhancing payload capacity and manipulation precision in aerial platforms, improving energy efficiency and operational endurance, and advancing autonomous decision-making capabilities for complex multi-modal operations.
The strategic importance of this technological comparison lies in identifying optimal application domains for each approach and potential synergies for integrated solutions. As automation demands increase across industries such as logistics, construction, agriculture, and emergency response, understanding the comparative advantages and limitations of mobile manipulation versus drone technology becomes crucial for informed technology adoption and investment decisions.
Future development trajectories aim to achieve seamless integration of ground and aerial manipulation capabilities, potentially leading to multi-modal robotic systems that can dynamically switch between operational modes based on task requirements and environmental constraints.
Drone technology, encompassing unmanned aerial vehicles (UAVs) and unmanned aerial systems (UAS), has experienced exponential growth from military origins to widespread civilian applications. The integration of advanced flight control systems, miniaturized sensors, and artificial intelligence has transformed drones from simple remote-controlled aircraft to autonomous platforms capable of complex mission execution. Recent developments in aerial manipulation have begun bridging the gap between traditional drone capabilities and mobile manipulation concepts.
The convergence of these technologies is creating new possibilities for applications requiring both mobility and manipulation capabilities across three-dimensional spaces. This intersection is particularly relevant as industries seek solutions that can operate in challenging environments where traditional ground-based or purely aerial systems face limitations. The combination offers potential advantages in accessibility, operational flexibility, and task versatility.
Current technological objectives focus on developing hybrid systems that leverage the strengths of both approaches while mitigating their respective limitations. Key development goals include enhancing payload capacity and manipulation precision in aerial platforms, improving energy efficiency and operational endurance, and advancing autonomous decision-making capabilities for complex multi-modal operations.
The strategic importance of this technological comparison lies in identifying optimal application domains for each approach and potential synergies for integrated solutions. As automation demands increase across industries such as logistics, construction, agriculture, and emergency response, understanding the comparative advantages and limitations of mobile manipulation versus drone technology becomes crucial for informed technology adoption and investment decisions.
Future development trajectories aim to achieve seamless integration of ground and aerial manipulation capabilities, potentially leading to multi-modal robotic systems that can dynamically switch between operational modes based on task requirements and environmental constraints.
Market Demand Analysis for Mobile Manipulation and Drone Applications
The global robotics market is experiencing unprecedented growth, driven by increasing automation demands across multiple industries. Mobile manipulation systems are gaining significant traction in manufacturing, warehousing, and logistics sectors where precise object handling combined with mobility is essential. These systems address critical labor shortages while improving operational efficiency and safety standards.
Industrial applications represent the largest market segment for mobile manipulation technology. Automotive manufacturing facilities increasingly deploy mobile manipulators for assembly line operations, parts transportation, and quality inspection tasks. The e-commerce boom has created substantial demand for warehouse automation solutions, where mobile manipulators excel at order fulfillment, inventory management, and package sorting operations.
Healthcare emerges as a rapidly expanding market for both technologies. Mobile manipulation systems find applications in hospital logistics, medication delivery, and patient care assistance. The aging global population and healthcare worker shortages drive sustained demand for robotic solutions that can perform routine tasks while maintaining human oversight for critical decisions.
Drone technology demonstrates strong market penetration across diverse sectors. Agriculture represents a mature application area where drones provide crop monitoring, precision spraying, and yield assessment capabilities. The construction and infrastructure inspection markets show robust growth as drones offer cost-effective alternatives to traditional surveying and monitoring methods.
Emergency response and public safety sectors increasingly adopt drone technology for search and rescue operations, disaster assessment, and surveillance applications. Military and defense markets continue to drive significant investment in advanced drone capabilities, though civilian applications now represent the fastest-growing segments.
The logistics and delivery market presents substantial opportunities for both technologies. While drones excel in last-mile delivery for lightweight packages and remote area access, mobile manipulators dominate indoor environments and complex handling requirements. Regulatory frameworks increasingly support commercial drone operations, expanding market accessibility.
Geographic demand patterns reveal strong adoption in developed economies with high labor costs and advanced manufacturing sectors. Asia-Pacific markets show rapid growth driven by industrial automation initiatives and smart city developments. North American and European markets emphasize service applications and regulatory compliance standards.
Market convergence trends indicate growing integration between mobile manipulation and drone technologies, creating hybrid solutions for complex operational challenges. This convergence expands addressable market opportunities while requiring specialized technical expertise and cross-platform integration capabilities.
Industrial applications represent the largest market segment for mobile manipulation technology. Automotive manufacturing facilities increasingly deploy mobile manipulators for assembly line operations, parts transportation, and quality inspection tasks. The e-commerce boom has created substantial demand for warehouse automation solutions, where mobile manipulators excel at order fulfillment, inventory management, and package sorting operations.
Healthcare emerges as a rapidly expanding market for both technologies. Mobile manipulation systems find applications in hospital logistics, medication delivery, and patient care assistance. The aging global population and healthcare worker shortages drive sustained demand for robotic solutions that can perform routine tasks while maintaining human oversight for critical decisions.
Drone technology demonstrates strong market penetration across diverse sectors. Agriculture represents a mature application area where drones provide crop monitoring, precision spraying, and yield assessment capabilities. The construction and infrastructure inspection markets show robust growth as drones offer cost-effective alternatives to traditional surveying and monitoring methods.
Emergency response and public safety sectors increasingly adopt drone technology for search and rescue operations, disaster assessment, and surveillance applications. Military and defense markets continue to drive significant investment in advanced drone capabilities, though civilian applications now represent the fastest-growing segments.
The logistics and delivery market presents substantial opportunities for both technologies. While drones excel in last-mile delivery for lightweight packages and remote area access, mobile manipulators dominate indoor environments and complex handling requirements. Regulatory frameworks increasingly support commercial drone operations, expanding market accessibility.
Geographic demand patterns reveal strong adoption in developed economies with high labor costs and advanced manufacturing sectors. Asia-Pacific markets show rapid growth driven by industrial automation initiatives and smart city developments. North American and European markets emphasize service applications and regulatory compliance standards.
Market convergence trends indicate growing integration between mobile manipulation and drone technologies, creating hybrid solutions for complex operational challenges. This convergence expands addressable market opportunities while requiring specialized technical expertise and cross-platform integration capabilities.
Current Status and Technical Challenges in Mobile Manipulation vs Drones
Mobile manipulation technology has achieved significant maturity in controlled industrial environments, with robotic arms mounted on mobile platforms successfully performing tasks in manufacturing and warehousing facilities. Leading companies like Boston Dynamics, KUKA, and ABB have developed sophisticated systems capable of autonomous navigation combined with precise manipulation tasks. These systems typically integrate advanced SLAM algorithms, computer vision, and force feedback control to achieve reliable performance in structured environments.
However, mobile manipulation faces substantial challenges when transitioning to unstructured environments. The primary technical bottleneck lies in real-time perception and decision-making capabilities. Current systems struggle with dynamic obstacle avoidance while simultaneously planning manipulation trajectories, particularly in cluttered or unpredictable environments. The computational overhead required for simultaneous localization, mapping, path planning, and manipulation control often exceeds real-time processing capabilities of onboard systems.
Drone technology has experienced rapid advancement in autonomous flight control and payload delivery systems. Commercial applications have proliferated across industries including logistics, agriculture, and surveillance. Modern drones demonstrate exceptional mobility and can access areas impossible for ground-based systems. However, manipulation capabilities remain severely limited due to payload constraints and stability issues during contact operations.
The fundamental challenge for drone-based manipulation stems from the inherent instability of aerial platforms during physical interaction tasks. When a drone attempts to manipulate objects, reaction forces significantly affect flight stability, requiring sophisticated control algorithms to maintain position and orientation. Current battery technology limits operational duration to 20-45 minutes for most commercial drones, severely constraining practical manipulation applications.
Both technologies face common challenges in perception systems, particularly in outdoor environments with varying lighting conditions and weather. Object recognition and pose estimation accuracy degrades significantly in real-world scenarios compared to laboratory conditions. Additionally, both platforms struggle with adaptive grasping of unknown objects, requiring extensive pre-programming or machine learning models trained on specific object categories.
Integration challenges emerge when considering hybrid systems that combine mobile ground platforms with aerial capabilities. Coordination between multiple robotic systems requires robust communication protocols and distributed control architectures that remain largely experimental. The complexity increases exponentially when attempting to coordinate manipulation tasks between ground and aerial platforms simultaneously.
However, mobile manipulation faces substantial challenges when transitioning to unstructured environments. The primary technical bottleneck lies in real-time perception and decision-making capabilities. Current systems struggle with dynamic obstacle avoidance while simultaneously planning manipulation trajectories, particularly in cluttered or unpredictable environments. The computational overhead required for simultaneous localization, mapping, path planning, and manipulation control often exceeds real-time processing capabilities of onboard systems.
Drone technology has experienced rapid advancement in autonomous flight control and payload delivery systems. Commercial applications have proliferated across industries including logistics, agriculture, and surveillance. Modern drones demonstrate exceptional mobility and can access areas impossible for ground-based systems. However, manipulation capabilities remain severely limited due to payload constraints and stability issues during contact operations.
The fundamental challenge for drone-based manipulation stems from the inherent instability of aerial platforms during physical interaction tasks. When a drone attempts to manipulate objects, reaction forces significantly affect flight stability, requiring sophisticated control algorithms to maintain position and orientation. Current battery technology limits operational duration to 20-45 minutes for most commercial drones, severely constraining practical manipulation applications.
Both technologies face common challenges in perception systems, particularly in outdoor environments with varying lighting conditions and weather. Object recognition and pose estimation accuracy degrades significantly in real-world scenarios compared to laboratory conditions. Additionally, both platforms struggle with adaptive grasping of unknown objects, requiring extensive pre-programming or machine learning models trained on specific object categories.
Integration challenges emerge when considering hybrid systems that combine mobile ground platforms with aerial capabilities. Coordination between multiple robotic systems requires robust communication protocols and distributed control architectures that remain largely experimental. The complexity increases exponentially when attempting to coordinate manipulation tasks between ground and aerial platforms simultaneously.
Current Technical Solutions for Mobile Manipulation vs Drone Systems
01 Autonomous navigation and obstacle avoidance systems for drones
Advanced navigation systems enable drones to autonomously navigate complex environments while detecting and avoiding obstacles in real-time. These systems utilize various sensors, computer vision algorithms, and artificial intelligence to process environmental data and make navigation decisions. The technology allows drones to operate safely in dynamic environments, adjusting flight paths automatically to avoid collisions with static and moving objects. This capability is essential for applications in urban environments, indoor spaces, and areas with dense obstacles.- Autonomous navigation and obstacle avoidance systems for drones: Advanced navigation systems enable drones to autonomously navigate complex environments while detecting and avoiding obstacles in real-time. These systems utilize various sensors and algorithms to ensure safe flight operations in dynamic settings. The technology allows drones to operate independently without constant human intervention, making them suitable for applications in confined or hazardous spaces.
- Integration of robotic manipulators with mobile platforms: Mobile manipulation systems combine robotic arms with mobile bases to enable versatile object handling and task execution. These integrated systems allow robots to navigate to target locations and perform precise manipulation tasks. The combination enhances operational flexibility and expands the range of applications in industrial, commercial, and service environments.
- Drone-based delivery and transportation systems: Unmanned aerial vehicles are being developed for automated delivery and transportation of goods across various distances. These systems incorporate payload management, route optimization, and landing mechanisms to facilitate efficient cargo transport. The technology addresses last-mile delivery challenges and enables access to remote or difficult-to-reach locations.
- Coordinated multi-drone and multi-robot systems: Collaborative systems enable multiple drones or robots to work together in coordinated operations for enhanced efficiency and coverage. These systems employ communication protocols and task allocation algorithms to distribute workload among multiple units. The coordinated approach improves operational scalability and enables complex mission execution that single units cannot accomplish alone.
- Drone and mobile robot control interfaces and remote operation: Advanced control systems provide intuitive interfaces for operating drones and mobile robots remotely or semi-autonomously. These interfaces incorporate telemetry data visualization, command input methods, and feedback mechanisms to facilitate effective human-machine interaction. The technology enables operators to manage complex operations while maintaining situational awareness and control authority.
02 Integration of robotic manipulators with mobile drone platforms
The combination of robotic manipulation capabilities with aerial drone platforms creates versatile systems capable of performing complex tasks. These integrated systems feature mechanical arms or grippers mounted on drones, enabling them to interact with objects and perform manipulation tasks while airborne or after landing. The technology addresses challenges such as weight distribution, stability control during manipulation, and coordination between flight control and manipulation operations. Applications include object retrieval, sample collection, and remote manipulation in hazardous or inaccessible locations.Expand Specific Solutions03 Coordinated multi-drone systems for collaborative operations
Multiple drones can be coordinated to work together as a unified system to accomplish complex tasks that exceed the capabilities of individual units. These systems employ communication protocols, task allocation algorithms, and synchronization mechanisms to enable collaborative operations. The technology enables swarm intelligence, distributed sensing, and cooperative manipulation tasks. Applications include large-area surveillance, coordinated delivery operations, and collaborative construction or assembly tasks where multiple drones must work in harmony.Expand Specific Solutions04 Drone-based delivery and logistics systems
Specialized drone systems designed for autonomous package delivery and logistics operations incorporate features such as secure payload compartments, precision landing capabilities, and route optimization algorithms. These systems address challenges including payload capacity management, delivery verification, weather adaptation, and integration with existing logistics infrastructure. The technology enables last-mile delivery solutions, emergency supply transport, and access to remote or difficult-to-reach locations. Safety features and regulatory compliance mechanisms are integrated to ensure reliable operation in populated areas.Expand Specific Solutions05 Drone control interfaces and human-machine interaction systems
Advanced control systems provide intuitive interfaces for operators to command and monitor drone operations, ranging from manual control to high-level task specification. These systems incorporate various input methods, real-time feedback mechanisms, and autonomous assistance features to enhance operational efficiency and reduce operator workload. The technology includes gesture recognition, voice commands, augmented reality displays, and adaptive automation that adjusts the level of autonomy based on task complexity and operator preference. Such interfaces are crucial for both professional applications and enabling non-expert users to operate sophisticated drone systems safely and effectively.Expand Specific Solutions
Major Players in Mobile Manipulation and Drone Industries
The mobile manipulation versus drone technology landscape represents a rapidly evolving competitive arena currently in its growth phase, with the global drone market exceeding $30 billion and mobile robotics approaching similar valuations. The industry demonstrates varying technology maturity levels across different applications. Established players like DJI dominate consumer and commercial drone segments with mature flight control systems, while tech giants Samsung, Sony, and Apple contribute advanced sensors and processing capabilities. Companies such as HHLA Sky and XTend Reality push boundaries in autonomous fleet management and tactical applications respectively. Mobile manipulation remains less mature, with most solutions still in development phases. The convergence of these technologies, supported by research institutions like Northwestern University and Zhejiang University, indicates an emerging hybrid market where companies like Huawei and Hitachi leverage their hardware expertise to create integrated robotic solutions combining aerial and ground-based manipulation capabilities.
SZ DJI Technology Co., Ltd.
Technical Solution: DJI has developed advanced drone technology platforms that integrate sophisticated flight control systems, computer vision, and AI-powered autonomous navigation capabilities. Their drone solutions feature real-time obstacle avoidance, precision positioning through GPS and visual-inertial odometry, and payload manipulation capabilities for industrial applications. The company's drone platforms support various manipulation tasks including cargo delivery, infrastructure inspection, and agricultural operations through modular payload systems. DJI's technology stack includes advanced gimbal stabilization systems, intelligent flight modes, and swarm coordination capabilities that enable multiple drones to work collaboratively on complex manipulation tasks in three-dimensional space.
Strengths: Market leadership in consumer and commercial drone technology, proven flight control systems, extensive ecosystem of compatible accessories and payloads. Weaknesses: Limited ground-based mobile manipulation capabilities, regulatory restrictions in certain markets, battery life constraints for extended operations.
Huawei Technologies Co., Ltd.
Technical Solution: Huawei has developed comprehensive mobile manipulation and drone technology solutions leveraging their 5G infrastructure, AI computing platforms, and edge computing capabilities. Their approach integrates mobile robotic platforms with advanced manipulation capabilities, supported by real-time communication networks and distributed AI processing. The technology includes autonomous navigation systems using LiDAR and computer vision, collaborative robotic arms for precision manipulation tasks, and cloud-edge computing architecture for coordinated multi-robot operations. Huawei's solutions target industrial automation, smart logistics, and infrastructure maintenance applications, featuring their proprietary Ascend AI processors for real-time decision making and their 5G networks for ultra-low latency remote control and coordination between multiple mobile manipulation units.
Strengths: Advanced 5G and networking infrastructure, powerful AI computing platforms, integrated cloud-edge architecture for scalable operations. Weaknesses: Geopolitical restrictions limiting market access, less specialized robotics hardware experience compared to dedicated robotics companies.
Core Technology Analysis in Mobile Manipulation and Drone Integration
System and method for ground objects manipulation using a drone
PatentPendingUS20230062759A1
Innovation
- A system that configures drones with downward-facing cameras for a top-view video feed, allowing users to select target locations on a display screen and control drones to converge automatically, with adjustable velocity and altitude, and equips drones with motorized arms for precise object manipulation, using sensor fusion algorithms for accurate navigation in various environments.




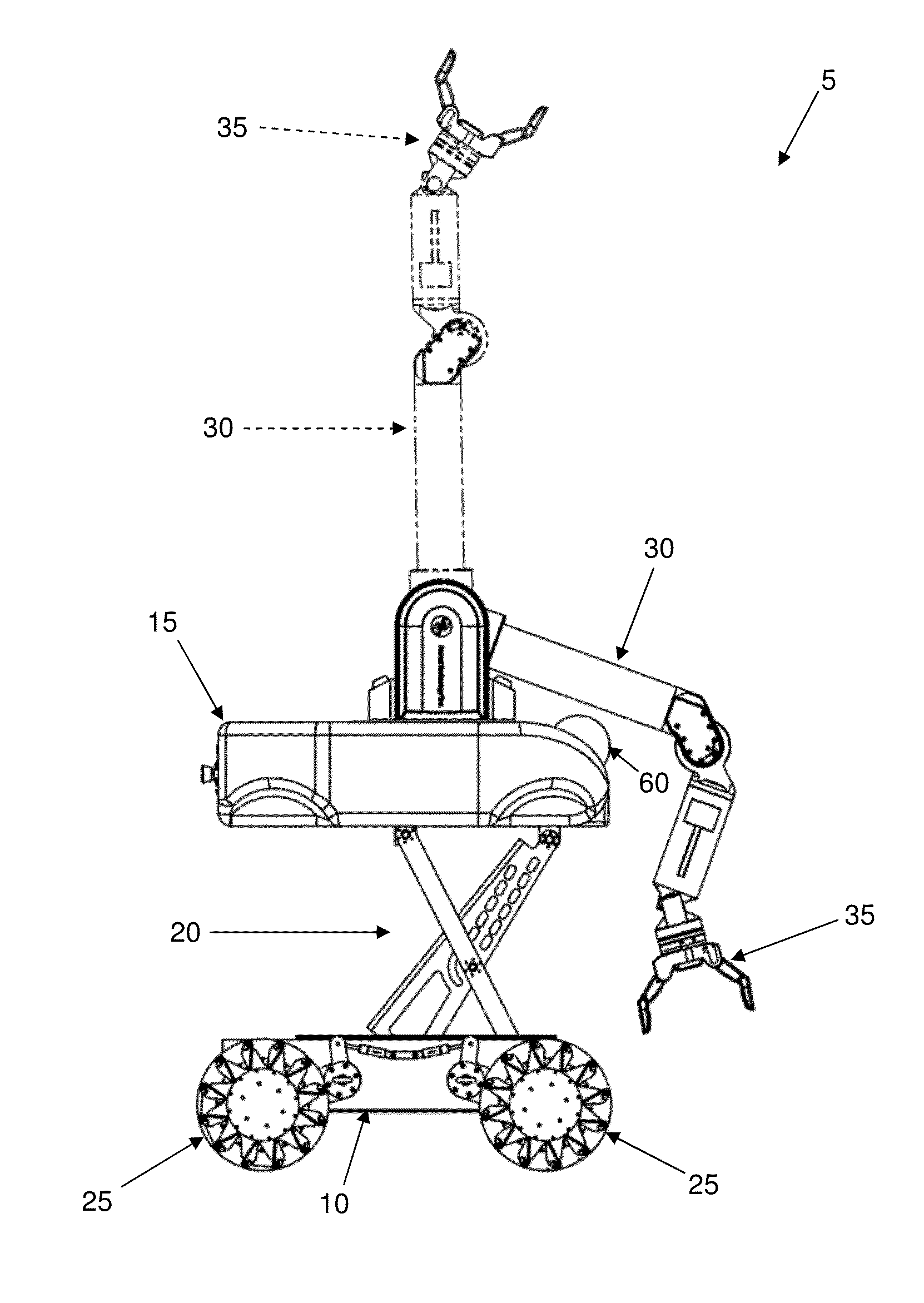
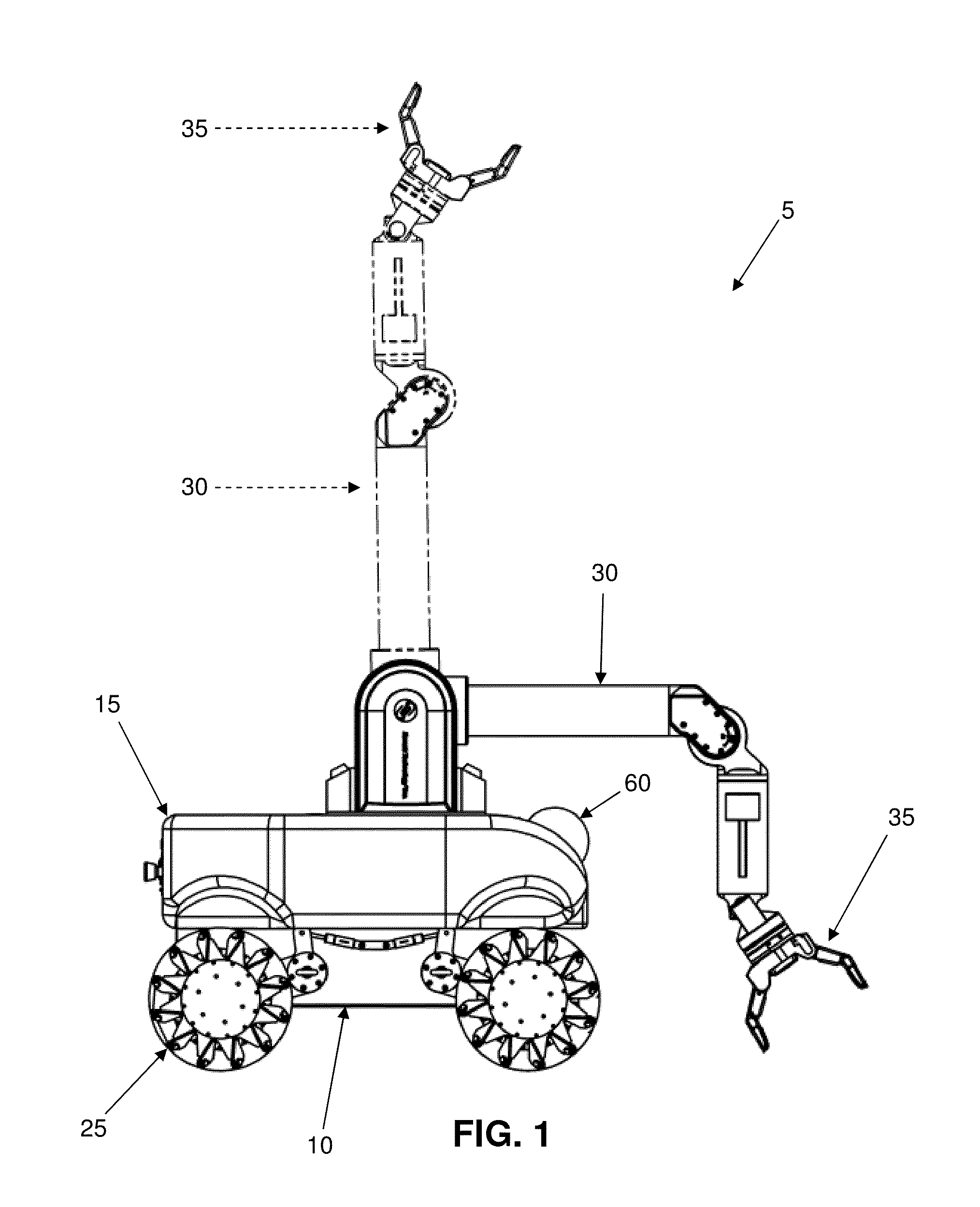
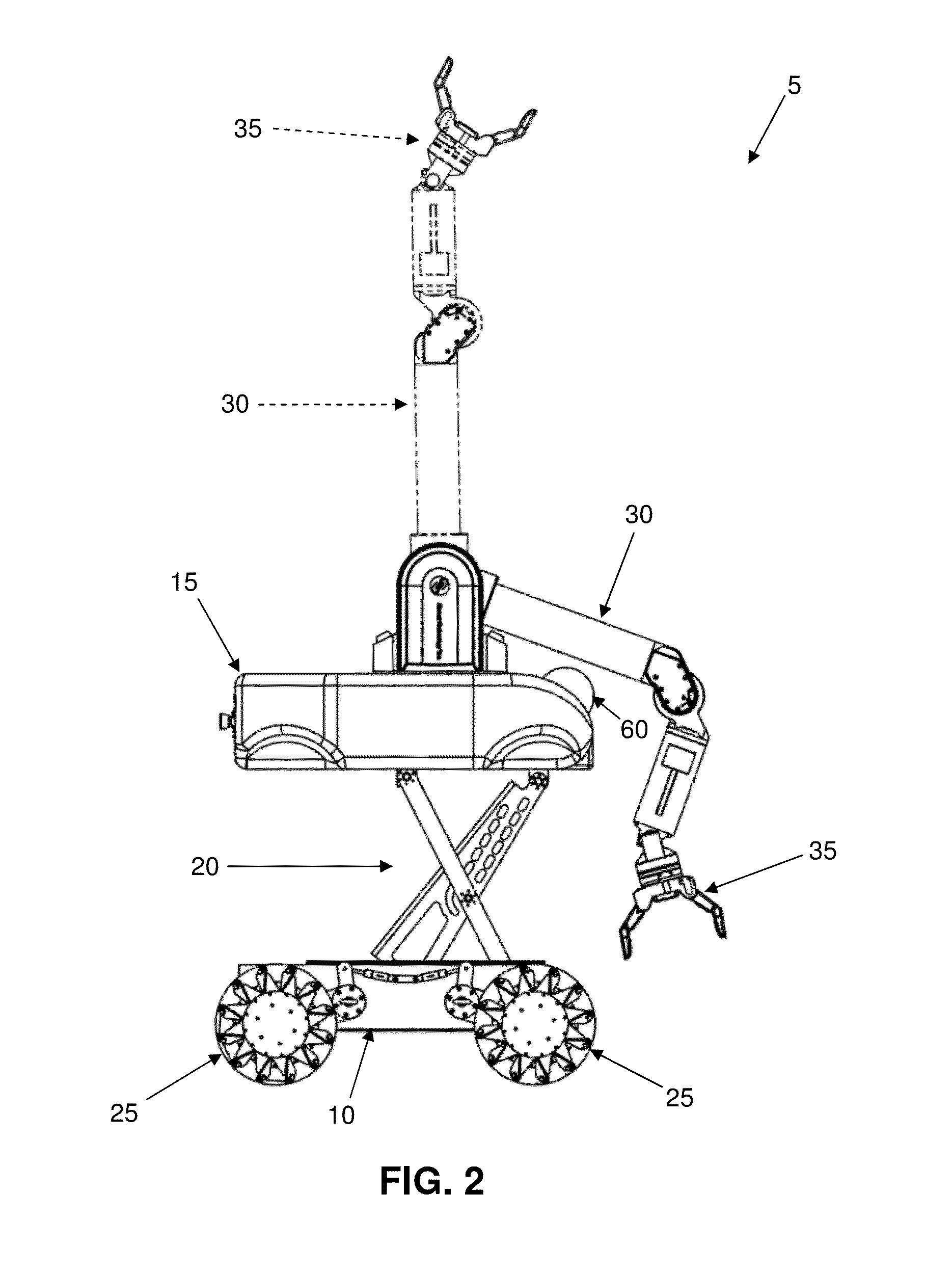
Mobile manipulation system with vertical lift
PatentInactiveUS20150050111A1
Innovation
- A mobile manipulation system with a mobile base equipped with an elevator mechanism, such as a scissors lift, that supports a platform with a robotic manipulator arm, allowing vertical movement to expand the system's reach from floor to overhead cabinets.

Safety Standards and Regulations for Mobile Manipulation and Drones
The regulatory landscape for mobile manipulation and drone technologies presents a complex framework that varies significantly across different jurisdictions and application domains. Current safety standards are primarily governed by aviation authorities for drones, such as the Federal Aviation Administration (FAA) in the United States and the European Union Aviation Safety Agency (EASA) in Europe. These regulations focus on airspace management, pilot certification, and operational limitations including altitude restrictions, no-fly zones, and visual line-of-sight requirements.
Mobile manipulation systems, particularly those operating in industrial environments, fall under occupational safety standards such as ISO 10218 for industrial robots and ANSI/RIA R15.06 for robot safety requirements. These standards emphasize risk assessment, safety-rated monitored stop functions, and collaborative operation protocols when humans and robots share workspaces.
The convergence of mobile manipulation and drone technologies creates regulatory gaps that current frameworks struggle to address. Hybrid systems that combine ground-based manipulation with aerial capabilities challenge existing categorical approaches to safety regulation. Key concerns include fail-safe mechanisms for aerial manipulation tasks, emergency landing procedures when carrying payloads, and coordination protocols between ground and air operations.
International standardization efforts are emerging through organizations like ISO/TC 20/SC 16 for unmanned aircraft systems and ISO/TC 299 for robotics. These bodies are developing comprehensive frameworks that address multi-modal robotic systems, including safety requirements for autonomous decision-making, human-robot interaction protocols, and cybersecurity standards for connected robotic platforms.
Compliance challenges arise from the need to satisfy multiple regulatory domains simultaneously. Organizations deploying integrated mobile manipulation and drone systems must navigate aviation regulations, workplace safety standards, data protection laws, and emerging AI governance frameworks. This regulatory complexity often results in conservative deployment strategies and extended certification timelines.
Future regulatory evolution is expected to embrace performance-based standards rather than prescriptive rules, enabling innovation while maintaining safety objectives. Risk-based certification approaches and sandbox regulatory environments are being explored to accelerate the safe integration of advanced robotic systems into various operational contexts.
Mobile manipulation systems, particularly those operating in industrial environments, fall under occupational safety standards such as ISO 10218 for industrial robots and ANSI/RIA R15.06 for robot safety requirements. These standards emphasize risk assessment, safety-rated monitored stop functions, and collaborative operation protocols when humans and robots share workspaces.
The convergence of mobile manipulation and drone technologies creates regulatory gaps that current frameworks struggle to address. Hybrid systems that combine ground-based manipulation with aerial capabilities challenge existing categorical approaches to safety regulation. Key concerns include fail-safe mechanisms for aerial manipulation tasks, emergency landing procedures when carrying payloads, and coordination protocols between ground and air operations.
International standardization efforts are emerging through organizations like ISO/TC 20/SC 16 for unmanned aircraft systems and ISO/TC 299 for robotics. These bodies are developing comprehensive frameworks that address multi-modal robotic systems, including safety requirements for autonomous decision-making, human-robot interaction protocols, and cybersecurity standards for connected robotic platforms.
Compliance challenges arise from the need to satisfy multiple regulatory domains simultaneously. Organizations deploying integrated mobile manipulation and drone systems must navigate aviation regulations, workplace safety standards, data protection laws, and emerging AI governance frameworks. This regulatory complexity often results in conservative deployment strategies and extended certification timelines.
Future regulatory evolution is expected to embrace performance-based standards rather than prescriptive rules, enabling innovation while maintaining safety objectives. Risk-based certification approaches and sandbox regulatory environments are being explored to accelerate the safe integration of advanced robotic systems into various operational contexts.
Comparative Performance Metrics and Application Scenarios Analysis
Mobile manipulation systems and drone technology exhibit distinct performance characteristics across multiple operational dimensions. Mobile manipulators demonstrate superior payload capacity, typically handling 5-50 kg loads compared to commercial drones' 1-10 kg limitations. Ground-based systems achieve positioning accuracy within 1-5 millimeters for precision tasks, while drones generally operate with centimeter-level precision due to aerial stability constraints. Battery endurance favors mobile manipulators with 4-8 hour operational windows versus drones' 20-60 minute flight times, though recent advances in drone battery technology are narrowing this gap.
Operational range presents contrasting advantages. Drones excel in covering large areas rapidly, with commercial models reaching 5-15 kilometer ranges, while mobile manipulators are confined to structured environments but offer unlimited operational duration when tethered to power sources. Environmental adaptability varies significantly, with mobile manipulators performing reliably in controlled indoor settings and drones demonstrating versatility across diverse terrains and weather conditions, albeit with wind speed and precipitation limitations.
In warehouse automation scenarios, mobile manipulators dominate heavy-duty applications requiring precise object placement and extended operational periods. Their integration with conveyor systems and ability to perform complex assembly tasks makes them ideal for manufacturing environments. Conversely, drones excel in inventory management, providing rapid aerial surveys of high-bay storage areas and accessing locations challenging for ground-based systems.
Emergency response applications reveal complementary strengths. Drones provide immediate situational awareness through rapid deployment and aerial reconnaissance capabilities, particularly valuable in disaster zones with compromised infrastructure. Mobile manipulators contribute through debris removal, equipment transport, and precise manipulation tasks in hazardous environments where human presence is restricted.
Agricultural applications showcase distinct operational niches. Drones efficiently monitor crop health across extensive farmlands, perform targeted pesticide application, and conduct aerial mapping for precision agriculture. Mobile manipulators excel in greenhouse environments, performing delicate harvesting operations, plant care tasks, and automated seeding with minimal crop damage.
The integration potential between these technologies presents emerging opportunities. Hybrid systems combining aerial reconnaissance with ground-based manipulation capabilities are demonstrating enhanced operational effectiveness in complex scenarios requiring both mobility and precision manipulation capabilities.
Operational range presents contrasting advantages. Drones excel in covering large areas rapidly, with commercial models reaching 5-15 kilometer ranges, while mobile manipulators are confined to structured environments but offer unlimited operational duration when tethered to power sources. Environmental adaptability varies significantly, with mobile manipulators performing reliably in controlled indoor settings and drones demonstrating versatility across diverse terrains and weather conditions, albeit with wind speed and precipitation limitations.
In warehouse automation scenarios, mobile manipulators dominate heavy-duty applications requiring precise object placement and extended operational periods. Their integration with conveyor systems and ability to perform complex assembly tasks makes them ideal for manufacturing environments. Conversely, drones excel in inventory management, providing rapid aerial surveys of high-bay storage areas and accessing locations challenging for ground-based systems.
Emergency response applications reveal complementary strengths. Drones provide immediate situational awareness through rapid deployment and aerial reconnaissance capabilities, particularly valuable in disaster zones with compromised infrastructure. Mobile manipulators contribute through debris removal, equipment transport, and precise manipulation tasks in hazardous environments where human presence is restricted.
Agricultural applications showcase distinct operational niches. Drones efficiently monitor crop health across extensive farmlands, perform targeted pesticide application, and conduct aerial mapping for precision agriculture. Mobile manipulators excel in greenhouse environments, performing delicate harvesting operations, plant care tasks, and automated seeding with minimal crop damage.
The integration potential between these technologies presents emerging opportunities. Hybrid systems combining aerial reconnaissance with ground-based manipulation capabilities are demonstrating enhanced operational effectiveness in complex scenarios requiring both mobility and precision manipulation capabilities.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!