

How to Implement Robust Communication in Mobile Manipulation
APR 24, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Mobile Manipulation Communication Background and Objectives
Mobile manipulation systems represent a convergence of autonomous navigation and robotic manipulation capabilities, enabling robots to perform complex tasks in dynamic environments. These systems integrate mobile platforms with manipulator arms, creating versatile robotic solutions capable of operating in warehouses, manufacturing facilities, healthcare settings, and domestic environments. The evolution of mobile manipulation has been driven by advances in sensor technology, computational power, and artificial intelligence algorithms.
The communication infrastructure in mobile manipulation systems serves as the nervous system that coordinates multiple subsystems including navigation controllers, manipulator control units, perception modules, and safety systems. Traditional approaches often relied on centralized communication architectures, but the increasing complexity of tasks and environmental uncertainties have exposed critical vulnerabilities in these systems. Communication failures can result in task interruption, safety hazards, and significant operational downtime.
Robust communication in mobile manipulation encompasses several critical dimensions including real-time data transmission, fault tolerance, network resilience, and adaptive bandwidth management. The challenge intensifies when considering the mobility aspect, as robots must maintain reliable communication while transitioning between different network zones, dealing with signal interference, and managing varying latency conditions. Additionally, the integration of multiple sensors generating high-frequency data streams places substantial demands on communication bandwidth and processing capabilities.
Current technological trends indicate a shift toward distributed communication architectures that can maintain operational continuity even when individual communication channels fail. The emergence of 5G networks, edge computing, and advanced wireless protocols presents new opportunities for enhancing communication robustness. However, implementing these technologies in mobile manipulation systems requires careful consideration of power consumption, computational overhead, and compatibility with existing robotic frameworks.
The primary objective of developing robust communication solutions for mobile manipulation is to achieve seamless coordination between all system components while maintaining operational reliability under adverse conditions. This includes establishing redundant communication pathways, implementing intelligent message prioritization schemes, and developing adaptive protocols that can dynamically adjust to changing network conditions. The ultimate goal is to create communication systems that enable mobile manipulators to perform complex tasks with minimal human intervention while ensuring safety and efficiency in real-world deployment scenarios.
The communication infrastructure in mobile manipulation systems serves as the nervous system that coordinates multiple subsystems including navigation controllers, manipulator control units, perception modules, and safety systems. Traditional approaches often relied on centralized communication architectures, but the increasing complexity of tasks and environmental uncertainties have exposed critical vulnerabilities in these systems. Communication failures can result in task interruption, safety hazards, and significant operational downtime.
Robust communication in mobile manipulation encompasses several critical dimensions including real-time data transmission, fault tolerance, network resilience, and adaptive bandwidth management. The challenge intensifies when considering the mobility aspect, as robots must maintain reliable communication while transitioning between different network zones, dealing with signal interference, and managing varying latency conditions. Additionally, the integration of multiple sensors generating high-frequency data streams places substantial demands on communication bandwidth and processing capabilities.
Current technological trends indicate a shift toward distributed communication architectures that can maintain operational continuity even when individual communication channels fail. The emergence of 5G networks, edge computing, and advanced wireless protocols presents new opportunities for enhancing communication robustness. However, implementing these technologies in mobile manipulation systems requires careful consideration of power consumption, computational overhead, and compatibility with existing robotic frameworks.
The primary objective of developing robust communication solutions for mobile manipulation is to achieve seamless coordination between all system components while maintaining operational reliability under adverse conditions. This includes establishing redundant communication pathways, implementing intelligent message prioritization schemes, and developing adaptive protocols that can dynamically adjust to changing network conditions. The ultimate goal is to create communication systems that enable mobile manipulators to perform complex tasks with minimal human intervention while ensuring safety and efficiency in real-world deployment scenarios.
Market Demand for Robust Mobile Manipulation Systems
The global market for robust mobile manipulation systems is experiencing unprecedented growth driven by the increasing demand for automation across multiple industrial sectors. Manufacturing facilities are actively seeking solutions that can seamlessly integrate mobility and precise manipulation capabilities to address labor shortages and enhance operational efficiency. The convergence of advanced robotics, artificial intelligence, and communication technologies has created a fertile ground for mobile manipulation systems that can operate reliably in complex, dynamic environments.
Logistics and warehousing operations represent one of the most significant market drivers, with companies requiring systems capable of autonomous navigation while performing delicate picking, packing, and sorting tasks. The e-commerce boom has intensified the need for flexible automation solutions that can adapt to varying product types and warehouse layouts without extensive reconfiguration. These applications demand robust communication protocols to ensure seamless coordination between mobile platforms and manipulation subsystems.
Healthcare facilities are emerging as a critical market segment, particularly for applications involving medication delivery, patient assistance, and surgical support. The stringent safety requirements in medical environments necessitate highly reliable communication systems that can maintain consistent performance even in the presence of electromagnetic interference from medical equipment. The aging population globally is further accelerating demand for assistive robotics that combine mobility and manipulation capabilities.
The construction and infrastructure maintenance sectors are increasingly adopting mobile manipulation systems for tasks such as inspection, repair, and material handling in hazardous or hard-to-reach locations. These applications require systems that can operate in challenging outdoor environments with varying communication conditions, including areas with limited network coverage or high electromagnetic noise.
Service robotics applications in hospitality, retail, and domestic environments are driving demand for more intuitive and reliable mobile manipulation systems. These markets require solutions that can safely interact with humans while maintaining consistent communication performance across diverse operational scenarios. The growing acceptance of robotic assistance in daily life is expanding the addressable market significantly.
Agricultural automation represents another promising market segment, where mobile manipulation systems are needed for precision farming tasks such as harvesting, pruning, and crop monitoring. These applications demand robust communication capabilities that can function reliably in outdoor environments with varying weather conditions and terrain challenges.
Logistics and warehousing operations represent one of the most significant market drivers, with companies requiring systems capable of autonomous navigation while performing delicate picking, packing, and sorting tasks. The e-commerce boom has intensified the need for flexible automation solutions that can adapt to varying product types and warehouse layouts without extensive reconfiguration. These applications demand robust communication protocols to ensure seamless coordination between mobile platforms and manipulation subsystems.
Healthcare facilities are emerging as a critical market segment, particularly for applications involving medication delivery, patient assistance, and surgical support. The stringent safety requirements in medical environments necessitate highly reliable communication systems that can maintain consistent performance even in the presence of electromagnetic interference from medical equipment. The aging population globally is further accelerating demand for assistive robotics that combine mobility and manipulation capabilities.
The construction and infrastructure maintenance sectors are increasingly adopting mobile manipulation systems for tasks such as inspection, repair, and material handling in hazardous or hard-to-reach locations. These applications require systems that can operate in challenging outdoor environments with varying communication conditions, including areas with limited network coverage or high electromagnetic noise.
Service robotics applications in hospitality, retail, and domestic environments are driving demand for more intuitive and reliable mobile manipulation systems. These markets require solutions that can safely interact with humans while maintaining consistent communication performance across diverse operational scenarios. The growing acceptance of robotic assistance in daily life is expanding the addressable market significantly.
Agricultural automation represents another promising market segment, where mobile manipulation systems are needed for precision farming tasks such as harvesting, pruning, and crop monitoring. These applications demand robust communication capabilities that can function reliably in outdoor environments with varying weather conditions and terrain challenges.
Current Communication Challenges in Mobile Manipulation
Mobile manipulation systems face significant communication challenges that directly impact their operational reliability and performance. The integration of mobile platforms with robotic manipulators creates complex communication requirements spanning multiple subsystems, sensors, and control units that must operate in real-time coordination.
Network latency represents one of the most critical challenges in mobile manipulation communication. Real-time control commands between the mobile base and manipulator arm require sub-millisecond response times to ensure precise coordination during manipulation tasks. Traditional wireless communication protocols often introduce variable delays that can destabilize the entire system, particularly during dynamic operations where the mobile platform is moving while the manipulator performs delicate tasks.
Bandwidth limitations pose another substantial obstacle, especially in environments with multiple robotic systems operating simultaneously. High-resolution sensor data from cameras, LiDAR, force sensors, and joint encoders must be transmitted continuously, often exceeding available bandwidth capacity. This congestion leads to data packet loss and degraded system performance, compromising the robot's ability to perceive and interact with its environment effectively.
Signal interference and reliability issues are particularly pronounced in industrial and urban environments where mobile manipulation systems typically operate. Electromagnetic interference from machinery, structural obstacles causing signal attenuation, and competing wireless devices create unstable communication channels. These disruptions can cause temporary communication blackouts, forcing systems into safe modes and interrupting critical operations.
Multi-protocol integration challenges arise from the diverse communication requirements of different subsystems. Mobile bases often utilize different communication standards than manipulator controllers, requiring complex protocol translation and synchronization mechanisms. This heterogeneity increases system complexity and introduces potential failure points where protocol mismatches can occur.
Scalability concerns become evident when deploying multiple mobile manipulation systems in shared environments. Current communication architectures struggle to maintain performance as the number of active systems increases, leading to network congestion and reduced individual system capabilities. The lack of efficient resource allocation and priority management protocols exacerbates these scalability limitations.
Security vulnerabilities in wireless communication channels expose mobile manipulation systems to potential cyber attacks. Unencrypted control signals and sensor data transmissions create opportunities for malicious interference, data interception, or system hijacking, raising significant concerns for deployment in sensitive applications.
Network latency represents one of the most critical challenges in mobile manipulation communication. Real-time control commands between the mobile base and manipulator arm require sub-millisecond response times to ensure precise coordination during manipulation tasks. Traditional wireless communication protocols often introduce variable delays that can destabilize the entire system, particularly during dynamic operations where the mobile platform is moving while the manipulator performs delicate tasks.
Bandwidth limitations pose another substantial obstacle, especially in environments with multiple robotic systems operating simultaneously. High-resolution sensor data from cameras, LiDAR, force sensors, and joint encoders must be transmitted continuously, often exceeding available bandwidth capacity. This congestion leads to data packet loss and degraded system performance, compromising the robot's ability to perceive and interact with its environment effectively.
Signal interference and reliability issues are particularly pronounced in industrial and urban environments where mobile manipulation systems typically operate. Electromagnetic interference from machinery, structural obstacles causing signal attenuation, and competing wireless devices create unstable communication channels. These disruptions can cause temporary communication blackouts, forcing systems into safe modes and interrupting critical operations.
Multi-protocol integration challenges arise from the diverse communication requirements of different subsystems. Mobile bases often utilize different communication standards than manipulator controllers, requiring complex protocol translation and synchronization mechanisms. This heterogeneity increases system complexity and introduces potential failure points where protocol mismatches can occur.
Scalability concerns become evident when deploying multiple mobile manipulation systems in shared environments. Current communication architectures struggle to maintain performance as the number of active systems increases, leading to network congestion and reduced individual system capabilities. The lack of efficient resource allocation and priority management protocols exacerbates these scalability limitations.
Security vulnerabilities in wireless communication channels expose mobile manipulation systems to potential cyber attacks. Unencrypted control signals and sensor data transmissions create opportunities for malicious interference, data interception, or system hijacking, raising significant concerns for deployment in sensitive applications.
Existing Robust Communication Solutions for Mobile Robots
01 Redundancy and backup communication paths
Communication systems can implement redundant communication paths and backup mechanisms to enhance robustness. This approach involves establishing multiple communication channels or routes so that if one path fails, the system can automatically switch to an alternative path. Redundancy techniques include dual communication links, failover protocols, and diverse routing strategies that ensure continuous operation even when primary communication channels experience disruptions or failures.- Redundancy and backup communication paths: Communication system robustness can be enhanced through the implementation of redundant communication channels and backup paths. This approach ensures continuous operation even when primary communication links fail. Multiple transmission routes and alternative communication methods can be established to maintain system reliability. Automatic switching mechanisms can detect failures and redirect traffic through backup channels, minimizing service interruption and maintaining system availability.
- Error detection and correction mechanisms: Robust communication systems incorporate advanced error detection and correction techniques to ensure data integrity during transmission. These mechanisms identify corrupted or lost data packets and implement recovery procedures. Forward error correction codes and automatic repeat request protocols can be employed to detect and correct transmission errors. Such techniques significantly improve communication reliability in noisy or unstable channel conditions, ensuring accurate data delivery even in challenging environments.
- Adaptive modulation and coding schemes: Communication robustness can be achieved through adaptive modulation and coding techniques that dynamically adjust transmission parameters based on channel conditions. These systems monitor signal quality and interference levels in real-time, automatically selecting optimal modulation schemes and coding rates. By adapting to varying channel conditions, the system maintains reliable communication while maximizing throughput. This approach ensures stable performance across different operating environments and varying signal strengths.
- Multi-layer security and authentication protocols: Robust communication systems implement comprehensive security measures including encryption, authentication, and access control mechanisms. These protocols protect against unauthorized access, data interception, and malicious attacks. Multiple security layers can be deployed at different protocol levels to ensure end-to-end protection. Authentication mechanisms verify the identity of communicating parties, while encryption safeguards data confidentiality during transmission, enhancing overall system robustness against security threats.
- Network monitoring and self-healing capabilities: Advanced communication systems incorporate intelligent monitoring and self-healing mechanisms to maintain robustness. These systems continuously monitor network performance, detect anomalies, and automatically implement corrective actions. Predictive algorithms can identify potential failures before they occur, enabling proactive maintenance. Self-healing capabilities allow the system to reconfigure itself, reroute traffic, and restore services without manual intervention, ensuring high availability and minimizing downtime in critical communication infrastructure.
02 Error detection and correction mechanisms
Robust communication systems incorporate advanced error detection and correction techniques to maintain data integrity during transmission. These mechanisms identify and correct errors that occur due to noise, interference, or other transmission impairments. Methods include forward error correction codes, cyclic redundancy checks, and adaptive coding schemes that adjust based on channel conditions to ensure reliable data delivery even in challenging communication environments.Expand Specific Solutions03 Adaptive modulation and coding schemes
Communication robustness can be enhanced through adaptive modulation and coding techniques that dynamically adjust transmission parameters based on channel conditions. These systems monitor signal quality and automatically modify modulation schemes, coding rates, and transmission power to optimize performance under varying conditions. This adaptability allows the system to maintain reliable communication links even when facing interference, fading, or other environmental challenges.Expand Specific Solutions04 Network topology and mesh architectures
Implementing robust network topologies such as mesh architectures enhances communication system resilience. These designs create multiple interconnected nodes where each node can communicate with several others, providing alternative routing options when direct paths are unavailable. Mesh networks and distributed architectures improve fault tolerance by eliminating single points of failure and enabling self-healing capabilities where the network automatically reconfigures to maintain connectivity.Expand Specific Solutions05 Signal processing and interference mitigation
Advanced signal processing techniques are employed to improve communication robustness by mitigating interference and enhancing signal quality. These methods include beamforming, interference cancellation, spectrum sensing, and filtering algorithms that reduce the impact of noise and unwanted signals. By processing signals intelligently at both transmitter and receiver ends, systems can maintain reliable communication even in congested or hostile electromagnetic environments.Expand Specific Solutions
Key Players in Mobile Manipulation and Communication Industry
The mobile manipulation communication technology sector is experiencing rapid growth as the industry transitions from early development to commercial deployment phases. The market is expanding significantly, driven by increasing demand for autonomous robots in warehouses, manufacturing, and service applications, with projections indicating substantial growth over the next decade. Technology maturity varies considerably across different communication aspects, with established telecommunications giants like Huawei, Samsung, Qualcomm, and Ericsson providing foundational 5G and wireless infrastructure, while specialized robotics companies such as Boston Dynamics lead in advanced mobility and manipulation capabilities. Traditional technology corporations including Sony, Panasonic, and Siemens contribute essential hardware components and industrial automation expertise. The competitive landscape also features emerging players like Nanjing AvatarMind and research institutions such as ETRI and Vrije Universiteit Brussel advancing cutting-edge communication protocols and AI integration, creating a diverse ecosystem spanning from fundamental communication technologies to sophisticated robotic applications.
Huawei Technologies Co., Ltd.
Technical Solution: Huawei's approach to robust communication in mobile manipulation leverages their 5G and edge computing expertise, implementing ultra-low latency communication protocols with network slicing capabilities. Their solution integrates AI-powered network optimization algorithms that dynamically adjust communication parameters based on real-time environmental conditions and task requirements. The system utilizes distributed edge computing nodes to minimize communication delays, implements advanced error correction mechanisms, and employs machine learning algorithms for predictive network management to ensure continuous connectivity during mobile manipulation operations.
Strengths: Strong telecommunications infrastructure expertise with advanced 5G and edge computing capabilities, comprehensive end-to-end solution integration. Weaknesses: Limited proven track record in robotics applications and potential geopolitical restrictions affecting global deployment and technology access.
Boston Dynamics, Inc.
Technical Solution: Boston Dynamics implements robust communication in mobile manipulation through their proprietary multi-layered communication architecture that integrates real-time sensor fusion, adaptive network protocols, and fault-tolerant control systems. Their robots like Spot and Atlas utilize distributed computing frameworks with redundant communication channels, enabling seamless coordination between perception, planning, and execution modules even in challenging environments. The system employs advanced error detection and recovery mechanisms, dynamic bandwidth allocation, and secure encrypted data transmission protocols to ensure reliable operation during complex manipulation tasks in unpredictable terrains and conditions.
Strengths: Industry-leading expertise in dynamic mobile robotics with proven real-world deployment capabilities and robust hardware-software integration. Weaknesses: High cost solutions with limited accessibility for broader commercial applications and proprietary systems that may lack interoperability with third-party platforms.
Core Communication Protocols for Mobile Manipulation
Network communication devices and methods for robotic operations
PatentWO2025183774A1
Innovation
- Implementing access point devices at fixed locations as nodes in a wireless local area network, equipped with signaling components, to track and communicate with mobile robots, enabling improved localization, network coverage, and safety monitoring, and integrating mobile bases and manipulators with holistic control strategies for efficient task performance.




Mobile manipulation system with vertical lift
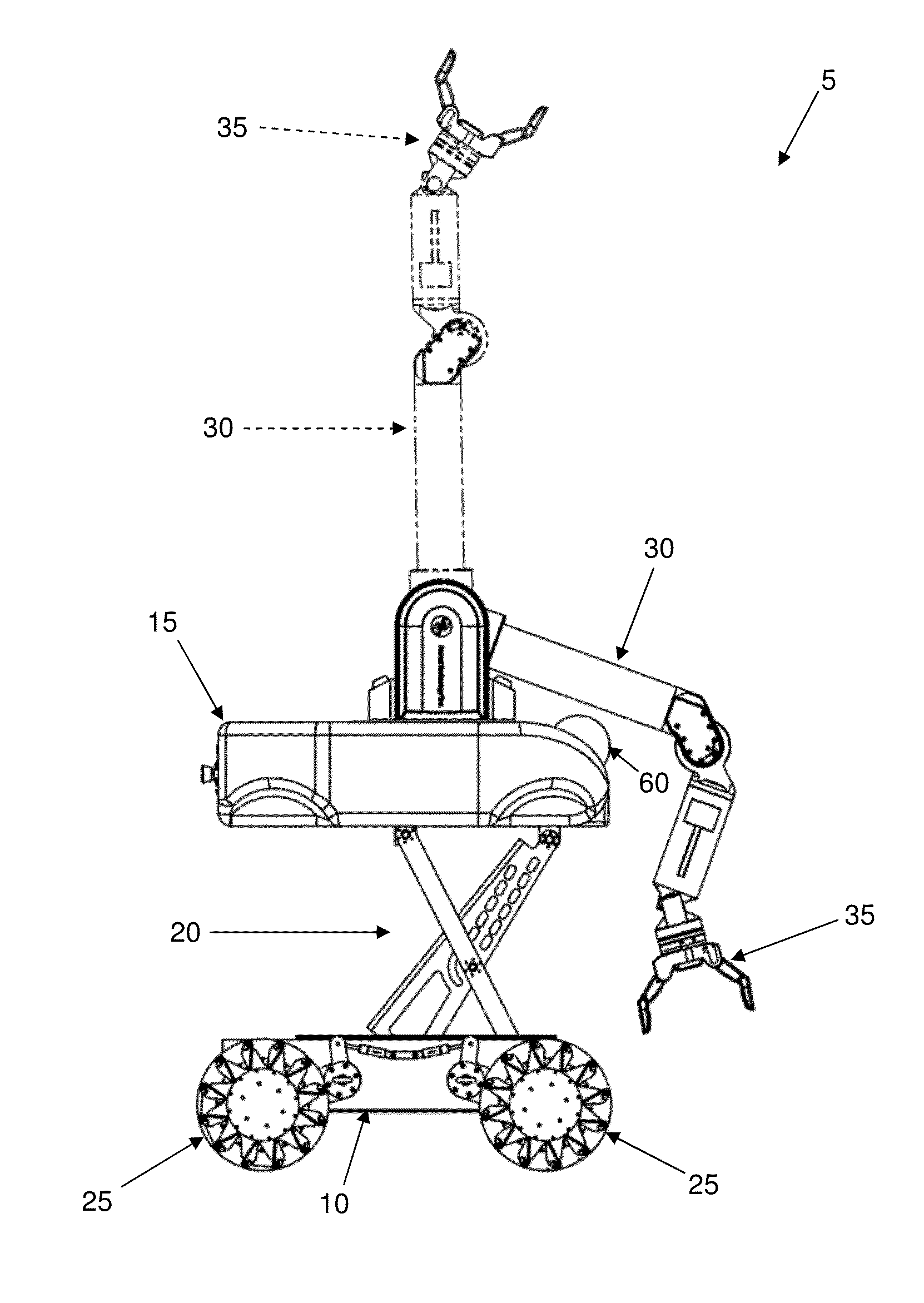
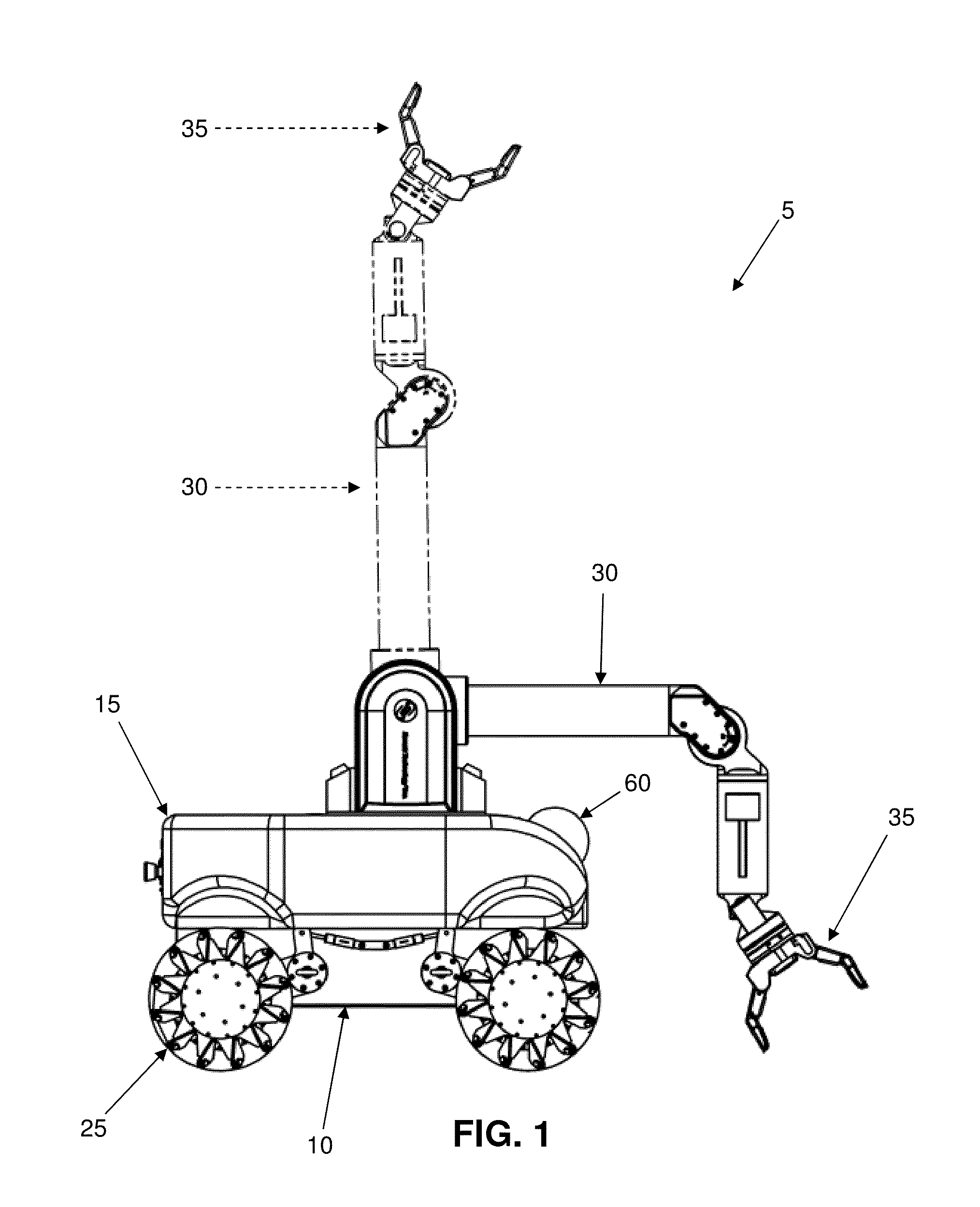
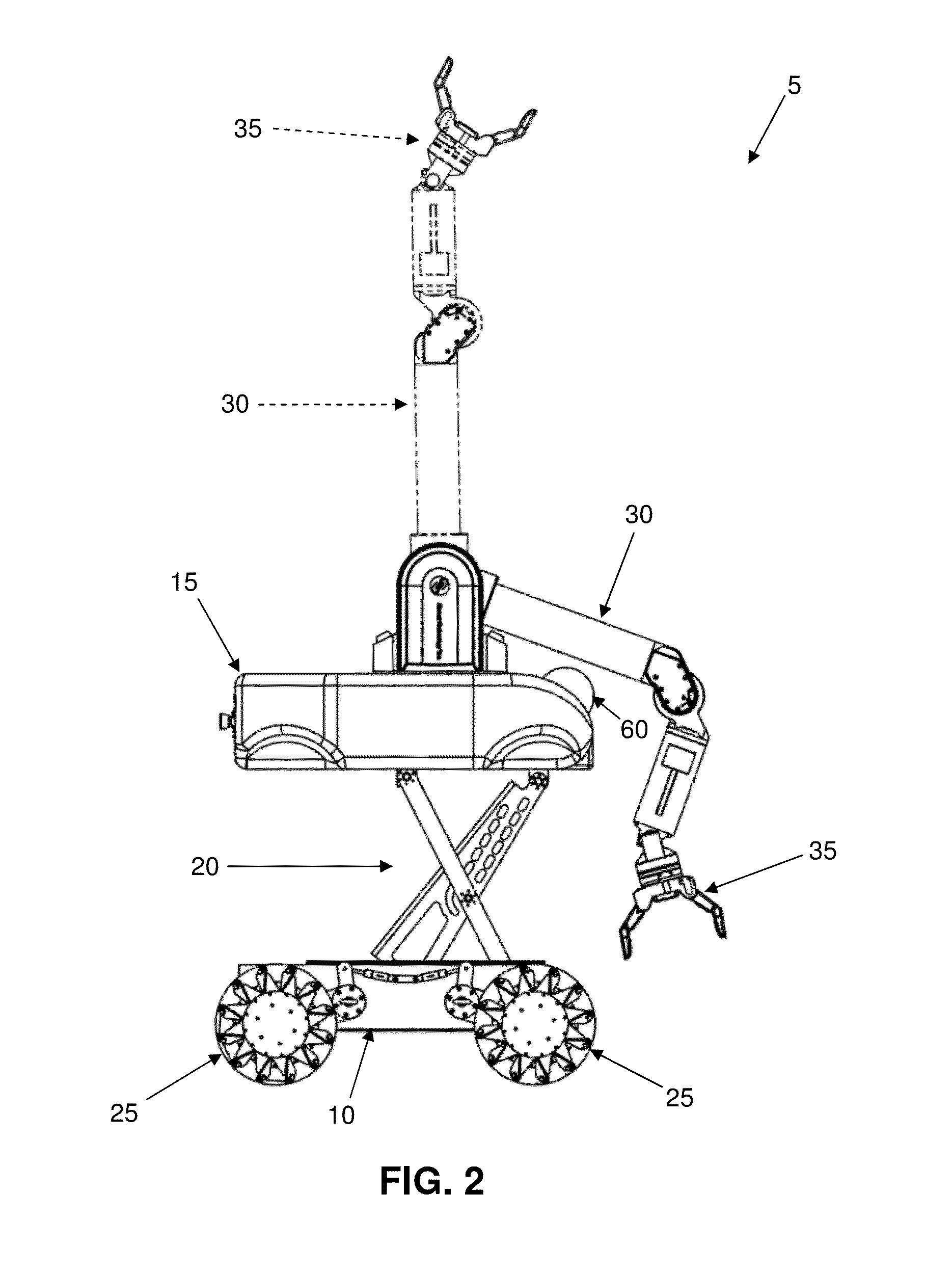
PatentInactiveUS20150050111A1
Innovation
- A mobile manipulation system with a mobile base equipped with an elevator mechanism, such as a scissors lift, that supports a platform with a robotic manipulator arm, allowing vertical movement to expand the system's reach from floor to overhead cabinets.

Safety Standards for Mobile Manipulation Communication
Safety standards for mobile manipulation communication systems have evolved significantly to address the unique challenges posed by autonomous robots operating in dynamic environments. These standards encompass multiple layers of protection, from hardware redundancy to software validation protocols, ensuring that communication failures do not compromise human safety or operational integrity.
The International Organization for Standardization (ISO) has established ISO 13482 as the primary safety standard for personal care robots, which includes mobile manipulation systems. This standard mandates specific communication reliability requirements, including fail-safe mechanisms that must activate within predetermined time thresholds when communication links are compromised. Additionally, the standard requires implementation of multiple independent communication channels to prevent single points of failure.
Industrial safety frameworks such as IEC 61508 provide functional safety requirements that directly impact communication system design. These standards classify safety integrity levels (SIL) ranging from SIL 1 to SIL 4, with mobile manipulation systems typically requiring SIL 2 or higher certification. Communication protocols must demonstrate quantifiable reliability metrics, including mean time between failures (MTBF) and probability of failure on demand (PFD) calculations.
Real-time communication standards like IEC 61784-3 define safety-related fieldbus protocols specifically designed for industrial automation applications. These protocols incorporate built-in safety functions such as sequence numbering, time stamping, and cyclic redundancy checks to detect communication errors. The standards mandate maximum response times for safety-critical messages, typically requiring acknowledgment within 10-50 milliseconds depending on the application criticality.
Emerging safety standards are addressing wireless communication challenges unique to mobile platforms. The IEEE 802.11 working group has developed amendments specifically for industrial wireless applications, incorporating deterministic medium access control mechanisms and enhanced security protocols. These standards address interference mitigation, signal degradation handling, and seamless handover procedures essential for maintaining continuous communication during robot mobility.
Compliance verification requires extensive testing protocols including electromagnetic compatibility assessments, communication latency measurements under various load conditions, and failure mode analysis. Safety standards mandate documentation of all communication failure scenarios and corresponding system responses, ensuring predictable behavior during emergency situations.
The International Organization for Standardization (ISO) has established ISO 13482 as the primary safety standard for personal care robots, which includes mobile manipulation systems. This standard mandates specific communication reliability requirements, including fail-safe mechanisms that must activate within predetermined time thresholds when communication links are compromised. Additionally, the standard requires implementation of multiple independent communication channels to prevent single points of failure.
Industrial safety frameworks such as IEC 61508 provide functional safety requirements that directly impact communication system design. These standards classify safety integrity levels (SIL) ranging from SIL 1 to SIL 4, with mobile manipulation systems typically requiring SIL 2 or higher certification. Communication protocols must demonstrate quantifiable reliability metrics, including mean time between failures (MTBF) and probability of failure on demand (PFD) calculations.
Real-time communication standards like IEC 61784-3 define safety-related fieldbus protocols specifically designed for industrial automation applications. These protocols incorporate built-in safety functions such as sequence numbering, time stamping, and cyclic redundancy checks to detect communication errors. The standards mandate maximum response times for safety-critical messages, typically requiring acknowledgment within 10-50 milliseconds depending on the application criticality.
Emerging safety standards are addressing wireless communication challenges unique to mobile platforms. The IEEE 802.11 working group has developed amendments specifically for industrial wireless applications, incorporating deterministic medium access control mechanisms and enhanced security protocols. These standards address interference mitigation, signal degradation handling, and seamless handover procedures essential for maintaining continuous communication during robot mobility.
Compliance verification requires extensive testing protocols including electromagnetic compatibility assessments, communication latency measurements under various load conditions, and failure mode analysis. Safety standards mandate documentation of all communication failure scenarios and corresponding system responses, ensuring predictable behavior during emergency situations.
Real-time Performance Requirements for Mobile Systems
Real-time performance requirements represent a critical cornerstone for successful mobile manipulation systems, where communication latency directly impacts operational safety and task execution effectiveness. Mobile manipulation platforms operating in dynamic environments must maintain communication response times within stringent temporal boundaries to ensure coordinated movement between mobile bases and manipulator arms while avoiding obstacles and maintaining system stability.
The fundamental real-time constraint for mobile manipulation systems typically demands end-to-end communication latency below 10-20 milliseconds for safety-critical operations. This requirement stems from the need to process sensor feedback, execute motion planning algorithms, and transmit control commands within time windows that prevent system instability or collision scenarios. Higher-level coordination tasks may tolerate latencies up to 100 milliseconds, while emergency stop commands must propagate through the system within 5 milliseconds to ensure immediate response capability.
Deterministic communication scheduling becomes essential when multiple subsystems compete for bandwidth resources. Mobile manipulation systems must prioritize message types based on criticality levels, with safety-related communications receiving highest priority, followed by real-time control signals, sensor data streams, and finally status updates or diagnostic information. This hierarchical approach ensures that time-sensitive operations maintain their performance guarantees even under network congestion conditions.
Jitter tolerance specifications define acceptable variations in communication timing, typically requiring standard deviations below 2-3 milliseconds for control loops and sensor fusion processes. Excessive jitter can destabilize feedback control systems and introduce coordination errors between mobile platform navigation and manipulator positioning, potentially compromising task precision and system reliability.
Bandwidth allocation strategies must account for peak data transmission scenarios, including simultaneous high-resolution sensor streaming, trajectory updates, and emergency communications. Modern mobile manipulation systems typically require sustained bandwidth of 50-100 Mbps with burst capabilities reaching 500 Mbps to accommodate multiple camera feeds, lidar point clouds, and dense trajectory data during complex manipulation tasks.
Fault tolerance mechanisms must maintain real-time performance even during communication degradation scenarios. Systems implement graceful degradation protocols that reduce data transmission rates while preserving critical control loops, ensuring continued operation under suboptimal network conditions while maintaining safety margins and basic functionality requirements.
The fundamental real-time constraint for mobile manipulation systems typically demands end-to-end communication latency below 10-20 milliseconds for safety-critical operations. This requirement stems from the need to process sensor feedback, execute motion planning algorithms, and transmit control commands within time windows that prevent system instability or collision scenarios. Higher-level coordination tasks may tolerate latencies up to 100 milliseconds, while emergency stop commands must propagate through the system within 5 milliseconds to ensure immediate response capability.
Deterministic communication scheduling becomes essential when multiple subsystems compete for bandwidth resources. Mobile manipulation systems must prioritize message types based on criticality levels, with safety-related communications receiving highest priority, followed by real-time control signals, sensor data streams, and finally status updates or diagnostic information. This hierarchical approach ensures that time-sensitive operations maintain their performance guarantees even under network congestion conditions.
Jitter tolerance specifications define acceptable variations in communication timing, typically requiring standard deviations below 2-3 milliseconds for control loops and sensor fusion processes. Excessive jitter can destabilize feedback control systems and introduce coordination errors between mobile platform navigation and manipulator positioning, potentially compromising task precision and system reliability.
Bandwidth allocation strategies must account for peak data transmission scenarios, including simultaneous high-resolution sensor streaming, trajectory updates, and emergency communications. Modern mobile manipulation systems typically require sustained bandwidth of 50-100 Mbps with burst capabilities reaching 500 Mbps to accommodate multiple camera feeds, lidar point clouds, and dense trajectory data during complex manipulation tasks.
Fault tolerance mechanisms must maintain real-time performance even during communication degradation scenarios. Systems implement graceful degradation protocols that reduce data transmission rates while preserving critical control loops, ensuring continued operation under suboptimal network conditions while maintaining safety margins and basic functionality requirements.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!