

Compare Mobile Manipulation Response Time: Wired vs Wireless
APR 24, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Mobile Manipulation Communication Tech Background and Goals
Mobile manipulation systems have emerged as a critical technology in modern robotics, combining autonomous mobile platforms with articulated manipulator arms to perform complex tasks in dynamic environments. These systems represent the convergence of mobile robotics and manipulation technologies, enabling robots to navigate through spaces while simultaneously performing dexterous operations such as object grasping, assembly, and material handling.
The evolution of mobile manipulation technology has been driven by increasing demands for automation in manufacturing, logistics, healthcare, and service industries. Early implementations relied heavily on wired communication systems, which provided reliable data transmission but imposed significant constraints on mobility and operational flexibility. The advent of wireless communication technologies has opened new possibilities for untethered operation, though it has introduced challenges related to latency, reliability, and bandwidth limitations.
Communication architecture plays a fundamental role in determining system performance, particularly response time characteristics. Response time encompasses the entire communication loop from sensor data acquisition, through processing and decision-making, to actuator command execution. In mobile manipulation applications, this metric directly impacts task execution quality, safety margins, and overall system effectiveness.
Wired communication systems traditionally offer deterministic performance with minimal latency variations, making them suitable for precision tasks requiring tight temporal coordination between mobile base and manipulator subsystems. These systems typically utilize industrial communication protocols such as EtherCAT, PROFINET, or CAN bus, which provide guaranteed bandwidth and predictable timing characteristics essential for real-time control applications.
Wireless communication technologies have evolved significantly, with modern standards including Wi-Fi 6, 5G, and dedicated industrial wireless protocols offering improved performance metrics. However, the inherent characteristics of wireless transmission introduce variability in response times due to factors such as signal interference, network congestion, and protocol overhead. Understanding these trade-offs is crucial for system designers and operators.
The primary objective of comparing wired versus wireless response times in mobile manipulation systems is to establish performance benchmarks that inform design decisions and operational strategies. This analysis aims to quantify the latency differences, identify critical performance thresholds, and determine optimal communication architectures for specific application scenarios. The research seeks to provide empirical data supporting the selection of appropriate communication technologies based on task requirements, environmental constraints, and performance specifications.
The evolution of mobile manipulation technology has been driven by increasing demands for automation in manufacturing, logistics, healthcare, and service industries. Early implementations relied heavily on wired communication systems, which provided reliable data transmission but imposed significant constraints on mobility and operational flexibility. The advent of wireless communication technologies has opened new possibilities for untethered operation, though it has introduced challenges related to latency, reliability, and bandwidth limitations.
Communication architecture plays a fundamental role in determining system performance, particularly response time characteristics. Response time encompasses the entire communication loop from sensor data acquisition, through processing and decision-making, to actuator command execution. In mobile manipulation applications, this metric directly impacts task execution quality, safety margins, and overall system effectiveness.
Wired communication systems traditionally offer deterministic performance with minimal latency variations, making them suitable for precision tasks requiring tight temporal coordination between mobile base and manipulator subsystems. These systems typically utilize industrial communication protocols such as EtherCAT, PROFINET, or CAN bus, which provide guaranteed bandwidth and predictable timing characteristics essential for real-time control applications.
Wireless communication technologies have evolved significantly, with modern standards including Wi-Fi 6, 5G, and dedicated industrial wireless protocols offering improved performance metrics. However, the inherent characteristics of wireless transmission introduce variability in response times due to factors such as signal interference, network congestion, and protocol overhead. Understanding these trade-offs is crucial for system designers and operators.
The primary objective of comparing wired versus wireless response times in mobile manipulation systems is to establish performance benchmarks that inform design decisions and operational strategies. This analysis aims to quantify the latency differences, identify critical performance thresholds, and determine optimal communication architectures for specific application scenarios. The research seeks to provide empirical data supporting the selection of appropriate communication technologies based on task requirements, environmental constraints, and performance specifications.
Market Demand for Real-Time Mobile Manipulation Systems
The global market for real-time mobile manipulation systems is experiencing unprecedented growth driven by the convergence of advanced robotics, artificial intelligence, and industrial automation demands. Manufacturing sectors, particularly automotive, electronics, and pharmaceutical industries, are increasingly adopting mobile manipulation platforms to enhance production efficiency and maintain competitive advantages in rapidly evolving markets.
Healthcare applications represent another significant demand driver, where surgical robots and rehabilitation systems require precise real-time control for patient safety and treatment efficacy. The aging population worldwide has intensified the need for assistive robotics in eldercare facilities, creating substantial market opportunities for responsive mobile manipulation technologies.
Logistics and warehousing operations have emerged as major consumers of real-time mobile manipulation systems, particularly following the e-commerce boom accelerated by global supply chain transformations. Companies are investing heavily in automated sorting, picking, and packaging solutions that demand minimal latency between command input and robotic response to maintain operational throughput.
The aerospace and defense sectors continue to drive demand for high-precision mobile manipulation systems, where mission-critical applications cannot tolerate communication delays. Space exploration missions, bomb disposal operations, and maintenance tasks in hazardous environments require instantaneous response capabilities that directly impact mission success and personnel safety.
Service robotics markets, including hospitality, retail, and public safety applications, are expanding rapidly as consumer acceptance of robotic assistance grows. These applications often involve direct human interaction, making response time a critical factor in user experience and system adoption rates.
Emerging applications in agriculture, construction, and environmental monitoring are creating new market segments where mobile manipulation systems must operate in challenging outdoor environments. These sectors demand robust real-time performance despite potential wireless connectivity limitations, driving innovation in communication protocols and system architectures.
The market demand is further amplified by increasing labor shortages in developed economies, pushing organizations to seek automated solutions that can match or exceed human dexterity and responsiveness in manipulation tasks.
Healthcare applications represent another significant demand driver, where surgical robots and rehabilitation systems require precise real-time control for patient safety and treatment efficacy. The aging population worldwide has intensified the need for assistive robotics in eldercare facilities, creating substantial market opportunities for responsive mobile manipulation technologies.
Logistics and warehousing operations have emerged as major consumers of real-time mobile manipulation systems, particularly following the e-commerce boom accelerated by global supply chain transformations. Companies are investing heavily in automated sorting, picking, and packaging solutions that demand minimal latency between command input and robotic response to maintain operational throughput.
The aerospace and defense sectors continue to drive demand for high-precision mobile manipulation systems, where mission-critical applications cannot tolerate communication delays. Space exploration missions, bomb disposal operations, and maintenance tasks in hazardous environments require instantaneous response capabilities that directly impact mission success and personnel safety.
Service robotics markets, including hospitality, retail, and public safety applications, are expanding rapidly as consumer acceptance of robotic assistance grows. These applications often involve direct human interaction, making response time a critical factor in user experience and system adoption rates.
Emerging applications in agriculture, construction, and environmental monitoring are creating new market segments where mobile manipulation systems must operate in challenging outdoor environments. These sectors demand robust real-time performance despite potential wireless connectivity limitations, driving innovation in communication protocols and system architectures.
The market demand is further amplified by increasing labor shortages in developed economies, pushing organizations to seek automated solutions that can match or exceed human dexterity and responsiveness in manipulation tasks.
Current State of Wired vs Wireless Response Time Performance
The current landscape of mobile manipulation systems reveals significant performance disparities between wired and wireless communication architectures, particularly in response time characteristics. Contemporary wired systems, predominantly utilizing Ethernet-based protocols such as EtherCAT and PROFINET, consistently demonstrate response times ranging from 0.1 to 2 milliseconds for critical control loops. These systems leverage deterministic communication protocols that guarantee bounded latency through time-division multiplexing and priority-based scheduling mechanisms.
Wireless communication technologies in mobile manipulation applications currently exhibit considerably higher latency profiles. Standard Wi-Fi implementations typically achieve response times between 10-50 milliseconds, while cellular-based solutions using 4G LTE networks range from 20-100 milliseconds depending on network congestion and signal quality. The inherent variability in wireless channels introduces jitter that can reach up to 30% of the baseline latency, creating challenges for precise motion control applications.
Recent advancements in wireless technologies have begun to narrow this performance gap. Ultra-Wideband (UWB) systems now achieve sub-5 millisecond response times in controlled environments, while Time-Sensitive Networking (TSN) over Wi-Fi 6 has demonstrated capabilities approaching 5-10 milliseconds with reduced jitter characteristics. These improvements stem from enhanced medium access control protocols and dedicated quality-of-service mechanisms designed for industrial applications.
The reliability metrics further differentiate these approaches. Wired systems maintain packet loss rates below 0.001% under normal operating conditions, while wireless systems typically experience 0.1-1% packet loss rates due to interference, multipath effects, and mobility-induced handovers. This reliability disparity directly impacts the consistency of response time performance in real-world deployment scenarios.
Current testing methodologies reveal that environmental factors significantly influence wireless performance. Indoor industrial environments with metallic structures and electromagnetic interference can degrade wireless response times by 200-400%, while wired systems remain largely unaffected by such conditions. Temperature variations and physical obstacles create additional challenges for maintaining consistent wireless communication performance in mobile manipulation scenarios.
Wireless communication technologies in mobile manipulation applications currently exhibit considerably higher latency profiles. Standard Wi-Fi implementations typically achieve response times between 10-50 milliseconds, while cellular-based solutions using 4G LTE networks range from 20-100 milliseconds depending on network congestion and signal quality. The inherent variability in wireless channels introduces jitter that can reach up to 30% of the baseline latency, creating challenges for precise motion control applications.
Recent advancements in wireless technologies have begun to narrow this performance gap. Ultra-Wideband (UWB) systems now achieve sub-5 millisecond response times in controlled environments, while Time-Sensitive Networking (TSN) over Wi-Fi 6 has demonstrated capabilities approaching 5-10 milliseconds with reduced jitter characteristics. These improvements stem from enhanced medium access control protocols and dedicated quality-of-service mechanisms designed for industrial applications.
The reliability metrics further differentiate these approaches. Wired systems maintain packet loss rates below 0.001% under normal operating conditions, while wireless systems typically experience 0.1-1% packet loss rates due to interference, multipath effects, and mobility-induced handovers. This reliability disparity directly impacts the consistency of response time performance in real-world deployment scenarios.
Current testing methodologies reveal that environmental factors significantly influence wireless performance. Indoor industrial environments with metallic structures and electromagnetic interference can degrade wireless response times by 200-400%, while wired systems remain largely unaffected by such conditions. Temperature variations and physical obstacles create additional challenges for maintaining consistent wireless communication performance in mobile manipulation scenarios.
Existing Wired and Wireless Communication Solutions
01 Optimization of mobile device processing and response mechanisms
Technologies focused on improving the processing speed and response time of mobile devices through optimized algorithms, efficient data handling, and enhanced computational methods. These approaches include streamlined data processing pipelines, reduced latency in command execution, and improved system architecture to minimize delays in mobile device operations.- Motion planning and path optimization for mobile manipulation: Technologies for optimizing the motion planning and path generation of mobile manipulators to reduce response time. These methods involve algorithms that calculate efficient trajectories for both the mobile base and the manipulator arm, considering obstacles and workspace constraints. Advanced planning techniques can pre-compute motion sequences and optimize joint movements to minimize the time required to reach target positions and execute manipulation tasks.
- Real-time control systems and processing architectures: Implementation of real-time control systems and high-performance processing architectures to improve the response time of mobile manipulation systems. These systems utilize dedicated processors, parallel computing, and optimized control loops to reduce latency between sensor input and actuator output. Hardware and software architectures are designed to handle multiple concurrent tasks with minimal delay, enabling faster decision-making and execution.
- Sensor integration and perception systems: Advanced sensor integration and perception systems that enable faster environmental awareness and object recognition for mobile manipulators. These systems combine multiple sensor modalities including vision, force, and proximity sensors to quickly detect and localize objects. Rapid perception processing allows the system to respond more quickly to changes in the environment and adjust manipulation strategies accordingly.
- Predictive and anticipatory control methods: Predictive control strategies that anticipate future states and pre-position the mobile manipulator to reduce response time. These methods use predictive models to forecast task requirements and begin preparatory movements before explicit commands are received. Machine learning and artificial intelligence techniques can be employed to learn patterns and optimize anticipatory behaviors based on historical data and task context.
- Communication protocols and network optimization: Optimized communication protocols and network architectures designed to minimize latency in command transmission and data exchange for mobile manipulation systems. These solutions address delays in wireless communication, implement priority-based messaging, and utilize edge computing to process data closer to the manipulation system. Efficient communication frameworks ensure that control commands and sensor data are transmitted with minimal delay.
02 Touch input and gesture recognition response enhancement
Methods for reducing response time in touch-based mobile interfaces through improved touch detection algorithms, gesture recognition systems, and input processing techniques. These technologies enable faster interpretation of user inputs, reduced lag between touch events and system responses, and enhanced user interaction experiences through optimized touch sensitivity and processing.Expand Specific Solutions03 Network communication and data transmission optimization
Techniques for improving mobile device response time through enhanced network protocols, optimized data transmission methods, and reduced communication latency. These solutions address bandwidth management, packet prioritization, and efficient data routing to minimize delays in mobile network operations and improve overall system responsiveness.Expand Specific Solutions04 Real-time manipulation control systems
Systems designed for real-time control and manipulation operations in mobile platforms, incorporating feedback mechanisms, predictive algorithms, and adaptive control strategies. These technologies enable rapid response to manipulation commands, reduced mechanical latency, and improved coordination between sensing and actuation components.Expand Specific Solutions05 User interface responsiveness and display optimization
Approaches to enhance the responsiveness of mobile user interfaces through optimized rendering techniques, efficient display refresh mechanisms, and reduced visual latency. These methods include frame rate optimization, display buffer management, and streamlined graphics processing to provide immediate visual feedback and improved user experience.Expand Specific Solutions
Key Players in Mobile Robotics and Communication Industry
The mobile manipulation response time comparison between wired and wireless technologies represents a rapidly evolving market driven by increasing automation demands across industries. The sector is experiencing significant growth as enterprises seek more flexible robotic solutions, with wireless technologies gaining momentum despite traditional wired system advantages in latency and reliability. Technology maturity varies considerably among key players, with established telecommunications giants like Cisco, Intel, Samsung Electronics, Huawei, and Ericsson leading wireless infrastructure development, while companies like ABB, BMW, and Palfinger drive industrial automation applications. Research institutions like MIT and Fraunhofer-Gesellschaft contribute foundational technologies, while specialized firms like BlackBerry and Fortinet address security concerns critical for wireless implementations. The competitive landscape shows convergence between traditional networking companies and robotics manufacturers, indicating market consolidation as wireless solutions approach parity with wired systems in performance metrics.
Cisco Technology, Inc.
Technical Solution: Cisco develops comprehensive mobile manipulation solutions leveraging both wired and wireless connectivity technologies. Their approach integrates Time-Sensitive Networking (TSN) protocols for wired connections, achieving deterministic latency as low as 1-5 milliseconds for critical robotic control signals. For wireless implementations, they utilize Wi-Fi 6E and private 5G networks with edge computing capabilities, reducing response times to 10-20 milliseconds through local processing and optimized network slicing. Their Industrial IoT platform combines real-time analytics with adaptive network management to dynamically switch between wired and wireless modes based on application requirements and environmental conditions.
Strengths: Industry-leading networking expertise, comprehensive TSN implementation, robust enterprise-grade security. Weaknesses: Higher cost compared to consumer solutions, complex configuration requirements for optimal performance.
Intel Corp.
Technical Solution: Intel's mobile manipulation response optimization focuses on edge computing processors and wireless communication chipsets. Their approach utilizes specialized AI accelerators integrated with real-time operating systems to minimize processing delays in both wired and wireless scenarios. The company's Time Coordinated Computing initiative enables sub-millisecond synchronization between multiple robotic systems. Their wireless solutions incorporate advanced beamforming and MIMO technologies in Wi-Fi 6E chipsets, achieving response times comparable to wired connections in controlled environments. Intel's hardware-software co-design methodology optimizes the entire communication stack from silicon to application layer.
Strengths: Advanced semiconductor technology, strong AI acceleration capabilities, comprehensive hardware-software integration. Weaknesses: Dependency on third-party system integrators, limited direct robotics market presence.
Core Innovations in Low-Latency Mobile Robot Communication
Reducing paging response time in a wireless communication system
PatentWO2008147650A1
Innovation
- Implementing a Quick Paging Channel (QPCH) that broadcasts a paging indicator bit across all paging location areas before the next slot cycle, allowing mobile stations to switch to unslotted mode and quickly detect pages, enabling faster re-paging without waiting for the start of the next slot cycle, and using a Bayesian search algorithm to select subsequent re-paging areas based on probability distributions.



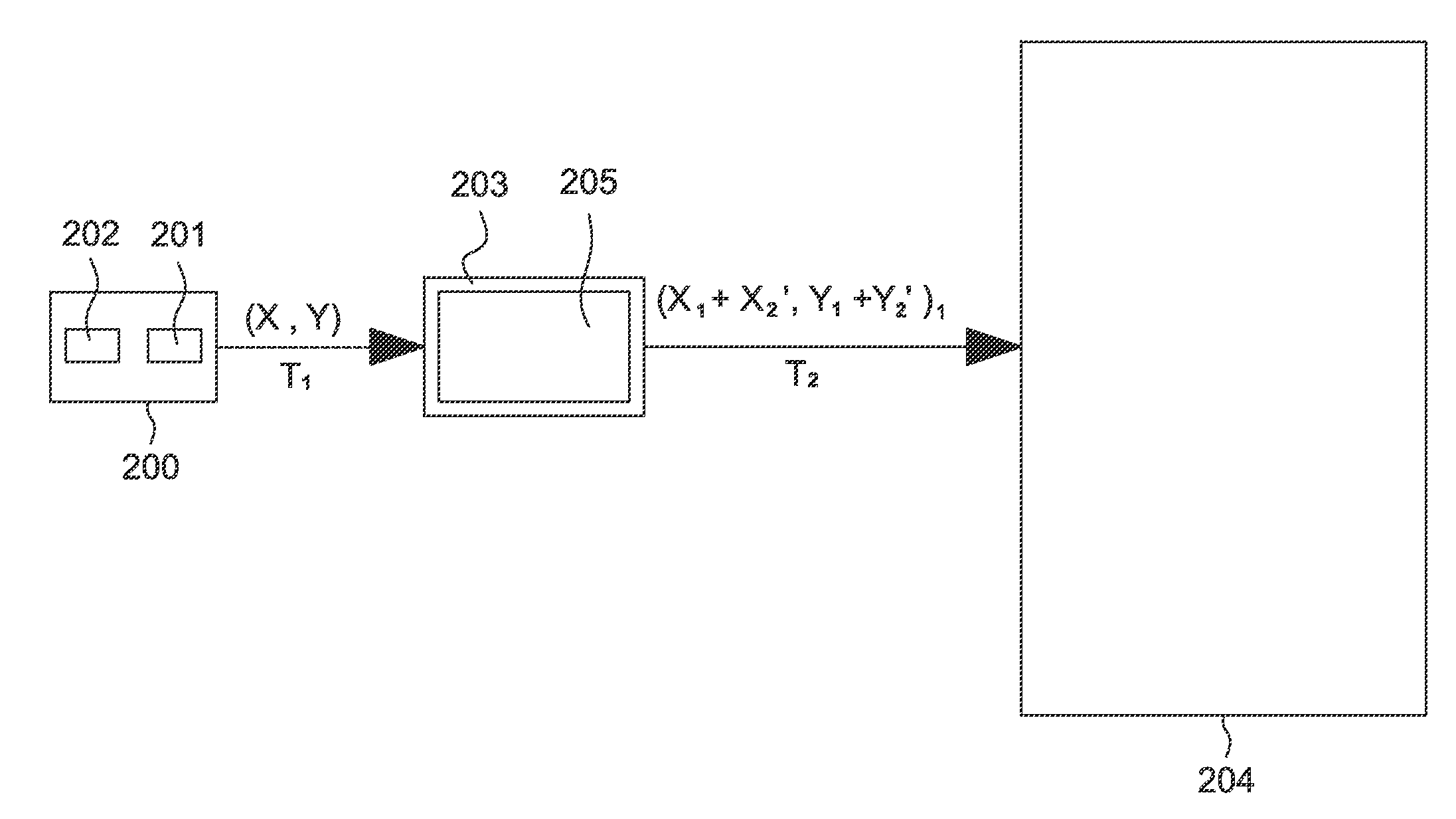
Data transmission method for use with wireless mouse
PatentInactiveUS8078779B2
Innovation
- A data transmission method for wireless mice that partitions horizontal and vertical displacements into sub-displacements and transmits them at a shorter wired transmission interval, allowing for increased report rates without significantly increasing power consumption by optimizing the transmission intervals and assigning remainders to reserve sub-displacements.

Safety Standards for Mobile Manipulation Response Times
Safety standards for mobile manipulation response times have become increasingly critical as robotic systems are deployed in environments where human safety is paramount. The fundamental principle underlying these standards is that response time directly correlates with the system's ability to prevent accidents and minimize harm during emergency situations. Current safety frameworks establish maximum allowable response times based on the severity of potential consequences, with critical safety functions requiring sub-millisecond responses.
International safety standards, including ISO 10218 for industrial robots and emerging IEC 61508 adaptations for mobile systems, define response time requirements across different safety integrity levels. These standards mandate that safety-critical functions must maintain response times below 10 milliseconds for emergency stops, while non-critical monitoring functions may allow up to 100 milliseconds. The standards also specify that communication latency, whether wired or wireless, must be factored into overall system response calculations.
Regulatory bodies have established distinct requirements for wired versus wireless communication systems in safety-critical applications. Wired systems benefit from deterministic communication protocols that guarantee maximum latency bounds, making compliance verification more straightforward. Wireless systems face additional scrutiny due to inherent variability in signal propagation and potential interference, requiring more sophisticated safety architectures including redundant communication paths and fail-safe mechanisms.
The certification process for mobile manipulation systems involves rigorous testing of response times under various operational conditions. Safety assessments must demonstrate consistent performance across different environmental factors, including electromagnetic interference, physical obstacles, and network congestion. These evaluations typically require statistical analysis of response time distributions rather than single-point measurements, ensuring robust safety margins.
Emerging safety standards are adapting to accommodate the unique challenges of wireless mobile manipulation systems. New frameworks incorporate probabilistic safety analysis methods that account for communication uncertainties while maintaining acceptable risk levels. These evolving standards recognize that wireless systems can achieve equivalent safety levels through advanced error detection, redundancy, and predictive safety algorithms, provided proper implementation and validation protocols are followed.
International safety standards, including ISO 10218 for industrial robots and emerging IEC 61508 adaptations for mobile systems, define response time requirements across different safety integrity levels. These standards mandate that safety-critical functions must maintain response times below 10 milliseconds for emergency stops, while non-critical monitoring functions may allow up to 100 milliseconds. The standards also specify that communication latency, whether wired or wireless, must be factored into overall system response calculations.
Regulatory bodies have established distinct requirements for wired versus wireless communication systems in safety-critical applications. Wired systems benefit from deterministic communication protocols that guarantee maximum latency bounds, making compliance verification more straightforward. Wireless systems face additional scrutiny due to inherent variability in signal propagation and potential interference, requiring more sophisticated safety architectures including redundant communication paths and fail-safe mechanisms.
The certification process for mobile manipulation systems involves rigorous testing of response times under various operational conditions. Safety assessments must demonstrate consistent performance across different environmental factors, including electromagnetic interference, physical obstacles, and network congestion. These evaluations typically require statistical analysis of response time distributions rather than single-point measurements, ensuring robust safety margins.
Emerging safety standards are adapting to accommodate the unique challenges of wireless mobile manipulation systems. New frameworks incorporate probabilistic safety analysis methods that account for communication uncertainties while maintaining acceptable risk levels. These evolving standards recognize that wireless systems can achieve equivalent safety levels through advanced error detection, redundancy, and predictive safety algorithms, provided proper implementation and validation protocols are followed.
Network Infrastructure Requirements for Mobile Robotics
Mobile robotics applications demand robust network infrastructure to support real-time communication between robotic systems and control centers. The fundamental architecture must accommodate both wired and wireless connectivity options, each presenting distinct advantages and limitations for mobile manipulation tasks. Network infrastructure design directly impacts response time performance, making it a critical consideration for deployment strategies.
Wired network infrastructure typically relies on Ethernet-based connections, offering dedicated bandwidth and consistent data transmission rates. Industrial Ethernet protocols such as EtherCAT, PROFINET, and Ethernet/IP provide deterministic communication with microsecond-level precision. These systems require physical cable management solutions, including retractable cable reels, cable carriers, and overhead track systems to maintain connectivity during robot movement. The infrastructure must support Power over Ethernet capabilities to reduce cable complexity while ensuring adequate power delivery for sensors and actuators.
Wireless network infrastructure encompasses multiple technologies, each suited for different operational requirements. Wi-Fi 6 and Wi-Fi 6E networks provide high-bandwidth connectivity with improved latency characteristics compared to previous generations. 5G cellular networks offer ultra-low latency communication with network slicing capabilities, enabling dedicated bandwidth allocation for critical robotic operations. Private LTE networks present an intermediate solution, combining cellular reliability with local control and reduced dependency on public infrastructure.
Edge computing infrastructure plays a crucial role in minimizing response times for both wired and wireless deployments. Local processing nodes positioned strategically throughout the operational environment reduce data transmission distances and enable real-time decision-making. These edge devices must support containerized applications and provide sufficient computational resources for computer vision, path planning, and manipulation algorithms.
Network redundancy and failover mechanisms are essential components of mobile robotics infrastructure. Hybrid architectures combining wired and wireless connections provide seamless transitions between connectivity modes, ensuring continuous operation during cable disconnections or wireless signal degradation. Quality of Service protocols must prioritize critical control messages over less time-sensitive data streams, maintaining optimal response times under varying network loads.
Security infrastructure requirements include network segmentation, encrypted communication channels, and authentication protocols specifically designed for robotic systems. Industrial firewalls and intrusion detection systems must monitor network traffic patterns to identify potential security threats without introducing additional latency that could compromise response time performance.
Wired network infrastructure typically relies on Ethernet-based connections, offering dedicated bandwidth and consistent data transmission rates. Industrial Ethernet protocols such as EtherCAT, PROFINET, and Ethernet/IP provide deterministic communication with microsecond-level precision. These systems require physical cable management solutions, including retractable cable reels, cable carriers, and overhead track systems to maintain connectivity during robot movement. The infrastructure must support Power over Ethernet capabilities to reduce cable complexity while ensuring adequate power delivery for sensors and actuators.
Wireless network infrastructure encompasses multiple technologies, each suited for different operational requirements. Wi-Fi 6 and Wi-Fi 6E networks provide high-bandwidth connectivity with improved latency characteristics compared to previous generations. 5G cellular networks offer ultra-low latency communication with network slicing capabilities, enabling dedicated bandwidth allocation for critical robotic operations. Private LTE networks present an intermediate solution, combining cellular reliability with local control and reduced dependency on public infrastructure.
Edge computing infrastructure plays a crucial role in minimizing response times for both wired and wireless deployments. Local processing nodes positioned strategically throughout the operational environment reduce data transmission distances and enable real-time decision-making. These edge devices must support containerized applications and provide sufficient computational resources for computer vision, path planning, and manipulation algorithms.
Network redundancy and failover mechanisms are essential components of mobile robotics infrastructure. Hybrid architectures combining wired and wireless connections provide seamless transitions between connectivity modes, ensuring continuous operation during cable disconnections or wireless signal degradation. Quality of Service protocols must prioritize critical control messages over less time-sensitive data streams, maintaining optimal response times under varying network loads.
Security infrastructure requirements include network segmentation, encrypted communication channels, and authentication protocols specifically designed for robotic systems. Industrial firewalls and intrusion detection systems must monitor network traffic patterns to identify potential security threats without introducing additional latency that could compromise response time performance.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!