Electrostatic Actuator Design for Micro-Robotics Precision
MAR 10, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Electrostatic Actuator Background and Micro-Robotics Goals
Electrostatic actuation represents a fundamental force mechanism that has evolved significantly since its initial discovery in the 18th century. The principle relies on the Coulomb force generated between charged surfaces, creating controllable mechanical motion through voltage application. Early applications were limited to large-scale demonstrations and laboratory experiments, but the advent of microfabrication technologies in the late 20th century revolutionized the field's potential.
The development trajectory of electrostatic actuators has been closely intertwined with advances in semiconductor manufacturing processes. The ability to create precise electrode geometries at microscale dimensions opened new possibilities for miniaturized actuation systems. Silicon-based micromachining techniques, particularly surface and bulk micromachining, enabled the fabrication of complex three-dimensional structures with nanometer-level precision.
Modern electrostatic actuators have found extensive applications across multiple domains, from MEMS devices to precision positioning systems. The technology's inherent advantages include low power consumption, fast response times, and excellent scalability to microscopic dimensions. These characteristics make electrostatic actuation particularly suitable for applications requiring precise control and minimal energy expenditure.
In the context of micro-robotics, the pursuit of precision has driven the need for actuators capable of delivering controlled motion at unprecedented scales. Traditional electromagnetic and pneumatic actuators face significant challenges when scaled down to microscopic dimensions, including reduced force output, increased power consumption, and manufacturing complexity. Electrostatic actuators emerge as a promising solution to address these limitations.
The primary objectives for electrostatic actuator development in micro-robotics encompass several critical performance parameters. Precision positioning with sub-micrometer accuracy represents a fundamental requirement for applications such as cellular manipulation, microsurgery, and precision assembly operations. The ability to generate sufficient force while maintaining compact form factors is essential for practical implementation in micro-robotic systems.
Energy efficiency constitutes another crucial goal, as micro-robotic applications often operate under strict power constraints. Electrostatic actuators offer inherent advantages in this regard, requiring minimal current flow during steady-state operation. The development of low-voltage operation capabilities further enhances their suitability for portable and battery-powered micro-robotic platforms.
Integration compatibility with existing microfabrication processes represents a strategic objective that influences design decisions and material selection. The goal is to develop actuator architectures that can be seamlessly incorporated into complex micro-robotic systems while maintaining manufacturing scalability and cost-effectiveness for potential commercial applications.
The development trajectory of electrostatic actuators has been closely intertwined with advances in semiconductor manufacturing processes. The ability to create precise electrode geometries at microscale dimensions opened new possibilities for miniaturized actuation systems. Silicon-based micromachining techniques, particularly surface and bulk micromachining, enabled the fabrication of complex three-dimensional structures with nanometer-level precision.
Modern electrostatic actuators have found extensive applications across multiple domains, from MEMS devices to precision positioning systems. The technology's inherent advantages include low power consumption, fast response times, and excellent scalability to microscopic dimensions. These characteristics make electrostatic actuation particularly suitable for applications requiring precise control and minimal energy expenditure.
In the context of micro-robotics, the pursuit of precision has driven the need for actuators capable of delivering controlled motion at unprecedented scales. Traditional electromagnetic and pneumatic actuators face significant challenges when scaled down to microscopic dimensions, including reduced force output, increased power consumption, and manufacturing complexity. Electrostatic actuators emerge as a promising solution to address these limitations.
The primary objectives for electrostatic actuator development in micro-robotics encompass several critical performance parameters. Precision positioning with sub-micrometer accuracy represents a fundamental requirement for applications such as cellular manipulation, microsurgery, and precision assembly operations. The ability to generate sufficient force while maintaining compact form factors is essential for practical implementation in micro-robotic systems.
Energy efficiency constitutes another crucial goal, as micro-robotic applications often operate under strict power constraints. Electrostatic actuators offer inherent advantages in this regard, requiring minimal current flow during steady-state operation. The development of low-voltage operation capabilities further enhances their suitability for portable and battery-powered micro-robotic platforms.
Integration compatibility with existing microfabrication processes represents a strategic objective that influences design decisions and material selection. The goal is to develop actuator architectures that can be seamlessly incorporated into complex micro-robotic systems while maintaining manufacturing scalability and cost-effectiveness for potential commercial applications.
Market Demand for Precision Micro-Robotic Systems
The global micro-robotics market is experiencing unprecedented growth driven by increasing demands for precision automation across multiple industries. Healthcare applications represent the largest segment, where micro-robotic systems enable minimally invasive surgical procedures, targeted drug delivery, and cellular manipulation. The pharmaceutical industry particularly values precision micro-robotics for automated laboratory processes, high-throughput screening, and microscale manufacturing of specialized compounds.
Manufacturing sectors are increasingly adopting micro-robotic solutions for assembly operations requiring sub-millimeter accuracy. Electronics manufacturing leads this adoption, utilizing micro-robots for component placement, micro-welding, and quality inspection of miniaturized devices. The semiconductor industry relies heavily on precision micro-robotics for wafer handling, die bonding, and failure analysis procedures where human intervention introduces unacceptable variability.
Research institutions and academic laboratories constitute a rapidly expanding market segment. These organizations require micro-robotic systems for biological research, materials science experiments, and nanotechnology development. The ability to manipulate individual cells, arrange nanostructures, and conduct precise measurements at microscopic scales has become essential for advancing scientific knowledge across disciplines.
The aerospace and defense industries present emerging opportunities for precision micro-robotics applications. Satellite component assembly, micro-sensor deployment, and maintenance operations in confined spaces require robotic systems capable of operating with exceptional accuracy under challenging conditions. These applications often demand custom solutions with specialized environmental tolerances.
Market growth is further accelerated by the increasing complexity of products requiring microscale assembly and inspection. Consumer electronics continue miniaturization trends, creating demand for manufacturing systems capable of handling components measured in micrometers. Medical device manufacturing similarly requires precision assembly of implantable devices and diagnostic equipment with stringent quality requirements.
The convergence of artificial intelligence and micro-robotics is creating new market opportunities. Intelligent micro-robotic systems capable of adaptive behavior and autonomous decision-making are becoming essential for applications requiring real-time response to changing conditions. This technological evolution is expanding the addressable market beyond traditional automation applications into areas previously considered too complex for robotic solutions.
Manufacturing sectors are increasingly adopting micro-robotic solutions for assembly operations requiring sub-millimeter accuracy. Electronics manufacturing leads this adoption, utilizing micro-robots for component placement, micro-welding, and quality inspection of miniaturized devices. The semiconductor industry relies heavily on precision micro-robotics for wafer handling, die bonding, and failure analysis procedures where human intervention introduces unacceptable variability.
Research institutions and academic laboratories constitute a rapidly expanding market segment. These organizations require micro-robotic systems for biological research, materials science experiments, and nanotechnology development. The ability to manipulate individual cells, arrange nanostructures, and conduct precise measurements at microscopic scales has become essential for advancing scientific knowledge across disciplines.
The aerospace and defense industries present emerging opportunities for precision micro-robotics applications. Satellite component assembly, micro-sensor deployment, and maintenance operations in confined spaces require robotic systems capable of operating with exceptional accuracy under challenging conditions. These applications often demand custom solutions with specialized environmental tolerances.
Market growth is further accelerated by the increasing complexity of products requiring microscale assembly and inspection. Consumer electronics continue miniaturization trends, creating demand for manufacturing systems capable of handling components measured in micrometers. Medical device manufacturing similarly requires precision assembly of implantable devices and diagnostic equipment with stringent quality requirements.
The convergence of artificial intelligence and micro-robotics is creating new market opportunities. Intelligent micro-robotic systems capable of adaptive behavior and autonomous decision-making are becoming essential for applications requiring real-time response to changing conditions. This technological evolution is expanding the addressable market beyond traditional automation applications into areas previously considered too complex for robotic solutions.
Current State and Challenges of Electrostatic Actuation
Electrostatic actuation technology has emerged as a cornerstone for micro-robotics applications, offering unique advantages in precision control and miniaturization. Current implementations primarily utilize parallel-plate capacitors, comb-drive structures, and curved electrode configurations to generate controlled forces at microscale dimensions. These actuators operate on the principle of electrostatic attraction between charged surfaces, enabling precise positioning with nanometer-level accuracy in many applications.
The technology landscape is dominated by silicon-based MEMS fabrication processes, which have enabled the mass production of electrostatic actuators with feature sizes ranging from micrometers to millimeters. Leading research institutions and companies have developed sophisticated designs incorporating multi-layer electrode structures, variable gap configurations, and integrated feedback systems to enhance performance characteristics.
Despite significant advances, several fundamental challenges continue to limit the widespread adoption of electrostatic actuators in precision micro-robotics. The primary constraint remains the inherently low force output compared to electromagnetic or piezoelectric alternatives, typically generating forces in the micro-Newton to milli-Newton range. This limitation becomes particularly pronounced when attempting to manipulate objects with significant mass or overcome environmental resistance forces.
Pull-in instability represents another critical challenge, occurring when the electrostatic force gradient exceeds the mechanical restoring force of the actuator structure. This phenomenon limits the stable operating range to approximately one-third of the initial gap distance, significantly constraining the achievable displacement range and potentially causing device failure through electrode contact.
Voltage requirements present additional complications, as most electrostatic actuators require operating voltages ranging from tens to hundreds of volts to generate meaningful forces. This necessitates complex high-voltage drive electronics and raises concerns about power consumption, safety, and integration with low-voltage control systems commonly used in micro-robotics platforms.
Manufacturing precision and repeatability pose ongoing challenges, particularly in maintaining consistent gap dimensions and surface properties across large-scale production. Variations in fabrication processes can lead to significant performance disparities between nominally identical devices, affecting the reliability and predictability required for precision applications.
Environmental sensitivity further complicates practical implementation, as electrostatic actuators are susceptible to humidity, contamination, and charging effects that can alter their operational characteristics over time. These factors necessitate careful packaging and environmental control measures that add complexity and cost to micro-robotic systems.
The technology landscape is dominated by silicon-based MEMS fabrication processes, which have enabled the mass production of electrostatic actuators with feature sizes ranging from micrometers to millimeters. Leading research institutions and companies have developed sophisticated designs incorporating multi-layer electrode structures, variable gap configurations, and integrated feedback systems to enhance performance characteristics.
Despite significant advances, several fundamental challenges continue to limit the widespread adoption of electrostatic actuators in precision micro-robotics. The primary constraint remains the inherently low force output compared to electromagnetic or piezoelectric alternatives, typically generating forces in the micro-Newton to milli-Newton range. This limitation becomes particularly pronounced when attempting to manipulate objects with significant mass or overcome environmental resistance forces.
Pull-in instability represents another critical challenge, occurring when the electrostatic force gradient exceeds the mechanical restoring force of the actuator structure. This phenomenon limits the stable operating range to approximately one-third of the initial gap distance, significantly constraining the achievable displacement range and potentially causing device failure through electrode contact.
Voltage requirements present additional complications, as most electrostatic actuators require operating voltages ranging from tens to hundreds of volts to generate meaningful forces. This necessitates complex high-voltage drive electronics and raises concerns about power consumption, safety, and integration with low-voltage control systems commonly used in micro-robotics platforms.
Manufacturing precision and repeatability pose ongoing challenges, particularly in maintaining consistent gap dimensions and surface properties across large-scale production. Variations in fabrication processes can lead to significant performance disparities between nominally identical devices, affecting the reliability and predictability required for precision applications.
Environmental sensitivity further complicates practical implementation, as electrostatic actuators are susceptible to humidity, contamination, and charging effects that can alter their operational characteristics over time. These factors necessitate careful packaging and environmental control measures that add complexity and cost to micro-robotic systems.
Existing Electrostatic Actuator Design Solutions
01 Electrostatic actuator structure design and electrode configuration
Precision in electrostatic actuators can be enhanced through optimized structural designs and electrode configurations. This includes the arrangement of fixed and movable electrodes, electrode spacing control, and geometric optimization to achieve uniform electric field distribution. Advanced electrode patterns and multi-layer structures can improve actuation accuracy and reduce positioning errors. The structural design also considers mechanical stability and thermal management to maintain consistent performance.- Electrostatic actuator structure design and electrode configuration: Precision in electrostatic actuators can be enhanced through optimized structural designs and electrode configurations. This includes the arrangement of fixed and movable electrodes, electrode spacing control, and geometric optimization to achieve uniform electric field distribution. Advanced electrode patterns and multi-layer structures can improve actuation accuracy and reduce positioning errors. The structural design also considers mechanical stability and thermal expansion effects to maintain consistent performance.
- Feedback control systems and position sensing mechanisms: Integration of feedback control systems with position sensing mechanisms significantly improves electrostatic actuator precision. Capacitive sensing, optical detection, or piezoelectric sensors can monitor actuator displacement in real-time. Closed-loop control algorithms process sensor data to adjust driving voltages dynamically, compensating for drift and external disturbances. These systems enable nanometer-scale positioning accuracy and repeatability in precision applications.
- Voltage control and driving signal optimization: Precise voltage control and optimized driving signals are critical for electrostatic actuator accuracy. This involves implementing high-resolution digital-to-analog converters, pulse-width modulation techniques, and waveform shaping to minimize overshoot and settling time. Voltage stabilization circuits and noise filtering ensure consistent electrostatic forces. Multi-phase driving strategies and adaptive voltage adjustment based on load conditions further enhance positioning precision and response characteristics.
- Material selection and surface treatment for stability: Material properties and surface treatments play a crucial role in maintaining electrostatic actuator precision. Selection of materials with low thermal expansion coefficients, high mechanical stiffness, and stable dielectric properties ensures dimensional stability. Surface treatments such as coating, polishing, or plasma processing reduce friction, prevent charge accumulation, and minimize hysteresis effects. These material considerations contribute to long-term precision and reliability under varying environmental conditions.
- Mechanical guidance and constraint mechanisms: Precision mechanical guidance systems and constraint mechanisms enhance electrostatic actuator accuracy by limiting unwanted degrees of freedom. Flexure hinges, spring suspensions, and precision bearings provide controlled motion paths while minimizing friction and backlash. These mechanical elements work in conjunction with electrostatic forces to achieve repeatable positioning. Design optimization of guidance structures considers stiffness, damping characteristics, and parasitic motion to maximize overall system precision.
02 Feedback control systems and position sensing
Implementing closed-loop feedback control systems with high-resolution position sensors significantly improves electrostatic actuator precision. Capacitive, optical, or piezoelectric sensors can monitor actuator displacement in real-time, enabling precise position control and compensation for drift or external disturbances. Advanced control algorithms process sensor data to adjust driving voltages dynamically, achieving nanometer-scale positioning accuracy and repeatability.Expand Specific Solutions03 Voltage control and driving signal optimization
Precision control of driving voltages and signal waveforms is critical for electrostatic actuator accuracy. This involves implementing high-resolution digital-to-analog converters, voltage amplifiers with low noise characteristics, and optimized pulse-width modulation techniques. Proper voltage regulation minimizes hysteresis effects and improves linearity of the actuator response. Multi-phase driving schemes and adaptive voltage control strategies can further enhance positioning precision and response speed.Expand Specific Solutions04 Material selection and surface treatment
The choice of materials and surface treatments directly impacts electrostatic actuator precision by affecting charge distribution, friction, and wear characteristics. Low-friction coatings, high-dielectric-constant materials, and surface roughness optimization reduce stiction and improve motion smoothness. Material properties such as thermal expansion coefficients and mechanical stiffness are carefully selected to minimize dimensional changes and maintain calibration over varying environmental conditions.Expand Specific Solutions05 Environmental compensation and calibration methods
Maintaining electrostatic actuator precision requires compensation for environmental factors such as temperature, humidity, and atmospheric pressure variations. Calibration procedures and self-correction algorithms account for drift and aging effects. Temperature sensors and compensation circuits adjust operating parameters to maintain consistent performance across different conditions. Periodic recalibration routines and built-in diagnostic features ensure long-term precision stability.Expand Specific Solutions
Key Players in Micro-Robotics and Actuator Industry
The electrostatic actuator design for micro-robotics precision field represents an emerging technology sector in the early development stage, characterized by significant research activity but limited commercial maturity. The market remains relatively niche, primarily driven by specialized applications in precision manufacturing, medical devices, and advanced robotics systems. Technology maturity varies considerably across key players, with established corporations like Toshiba Corp., Seiko Epson Corp., and DENSO Corp. demonstrating advanced capabilities in precision electromechanical systems, while research institutions including Harbin Institute of Technology, Shanghai University, and Nanyang Technological University contribute fundamental innovations. Companies such as Nikon Corp., Olympus Corp., and Carl Zeiss SMT GmbH leverage their optical precision expertise for micro-actuator applications. The competitive landscape shows a hybrid ecosystem where traditional electronics manufacturers collaborate with academic institutions and government research agencies like NASA and Japan Science & Technology Agency to advance miniaturization technologies and enhance precision control mechanisms for next-generation micro-robotic applications.
Toshiba Corp.
Technical Solution: Toshiba has developed advanced electrostatic actuator systems for micro-robotics applications, focusing on MEMS-based electrostatic comb-drive actuators that provide precise positioning control with nanometer-level accuracy. Their technology incorporates high-voltage drive circuits capable of generating up to 200V for enhanced force generation, combined with feedback control systems that enable closed-loop positioning with sub-micron precision. The company's electrostatic actuators utilize silicon-on-insulator (SOI) wafer technology for improved electrical isolation and reduced parasitic capacitance, resulting in faster response times and lower power consumption during standby operations.
Strengths: High precision positioning, low power consumption, established MEMS fabrication expertise. Weaknesses: Limited force output compared to electromagnetic alternatives, requires high voltage drive circuits.
Seiko Epson Corp.
Technical Solution: Seiko Epson has pioneered electrostatic actuator technology for precision micro-robotics, particularly in their quartz-based MEMS devices. Their electrostatic actuators employ parallel plate configurations with gap distances as small as 1-2 micrometers, enabling force generation up to several millinewtons while maintaining positioning accuracy within 10 nanometers. The company's proprietary fabrication process combines photolithography with deep reactive ion etching to create high-aspect-ratio structures, allowing for increased electrode surface area and enhanced electrostatic force generation. Their actuators integrate temperature compensation mechanisms and real-time feedback control systems for stable operation across varying environmental conditions.
Strengths: Exceptional precision, temperature stability, proven manufacturing scalability. Weaknesses: Complex fabrication process, susceptible to stiction effects in humid environments.
Core Patents in Precision Electrostatic Actuation
Electrostatic actuator
PatentInactiveUS7113386B2
Innovation
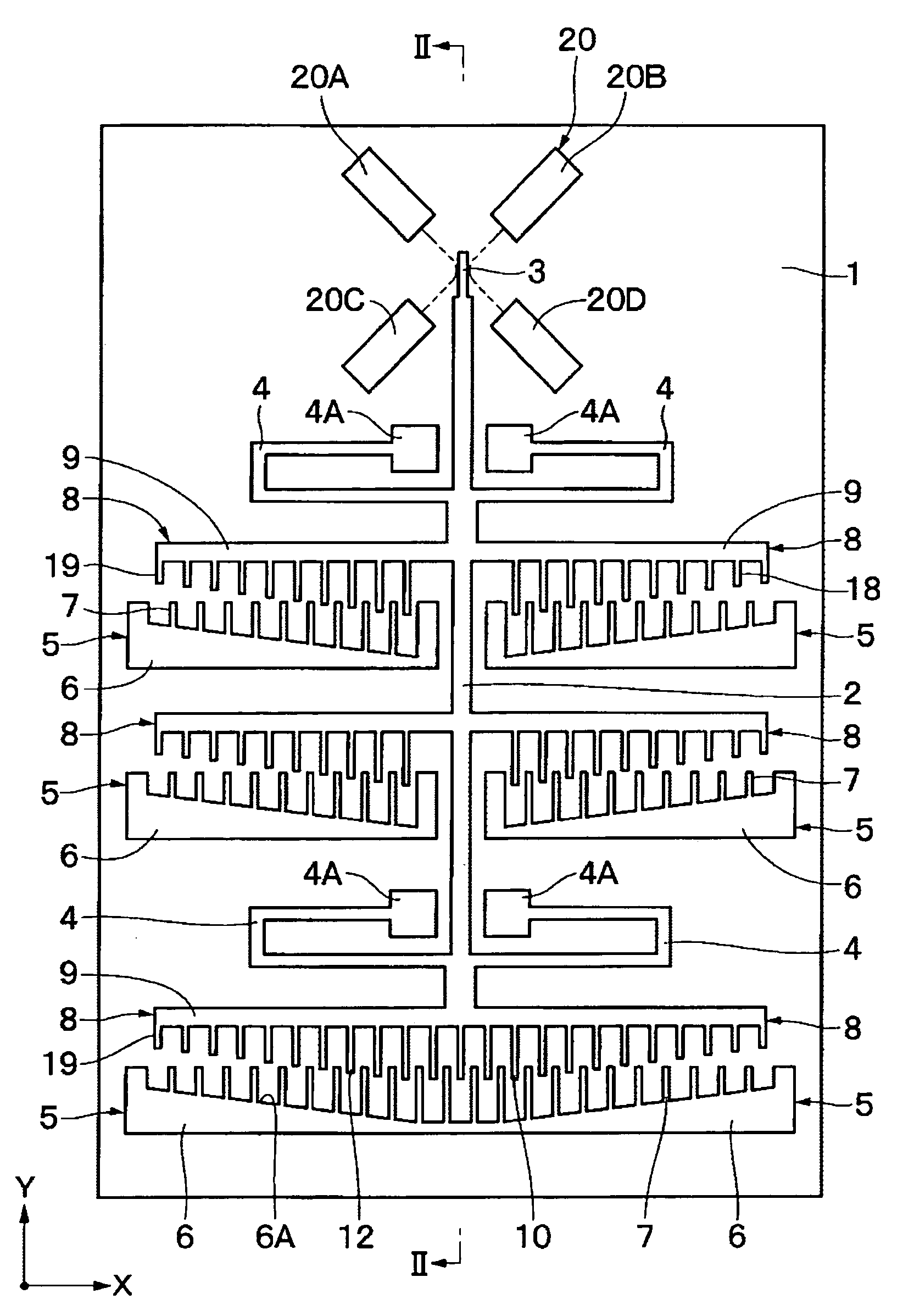
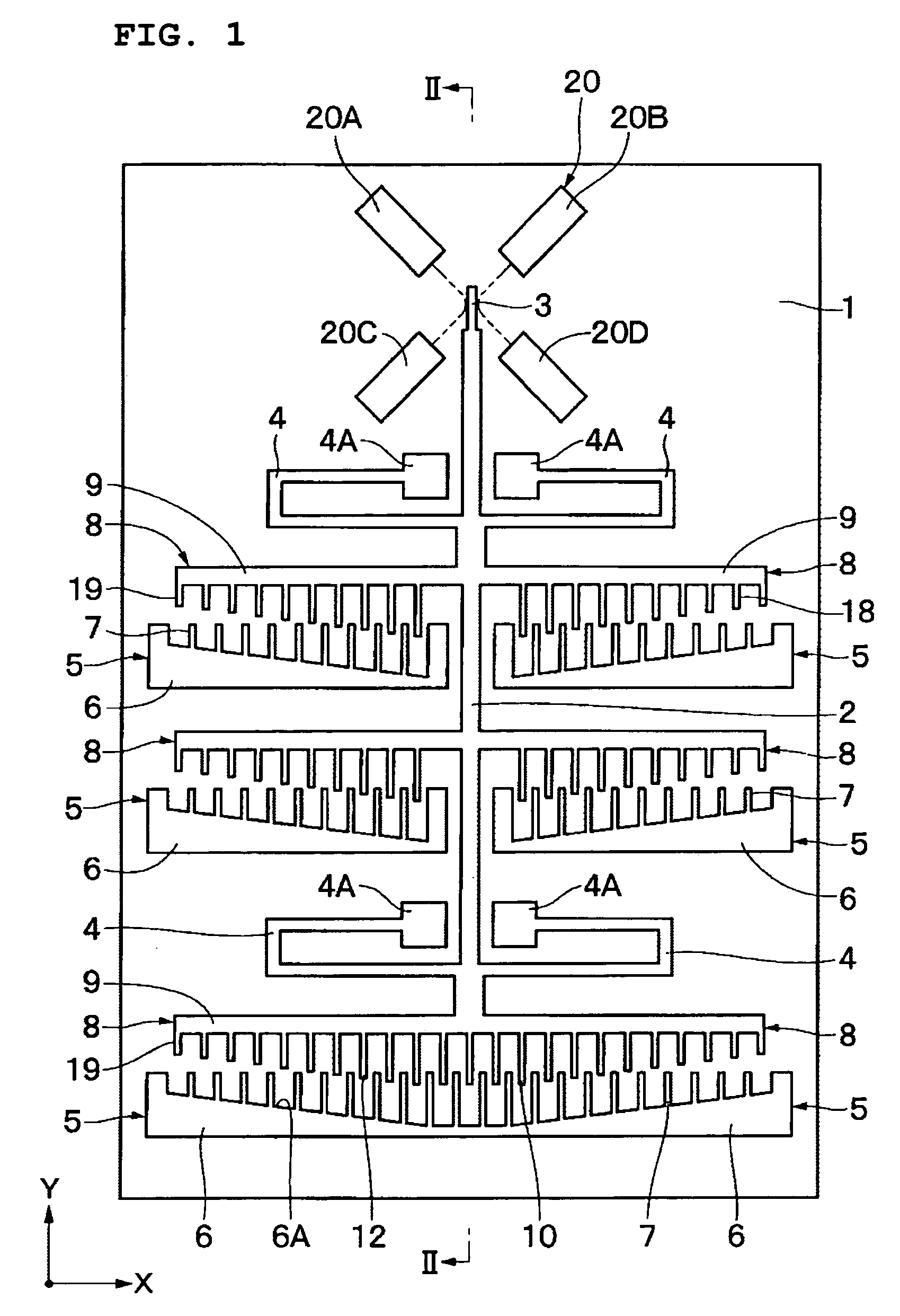
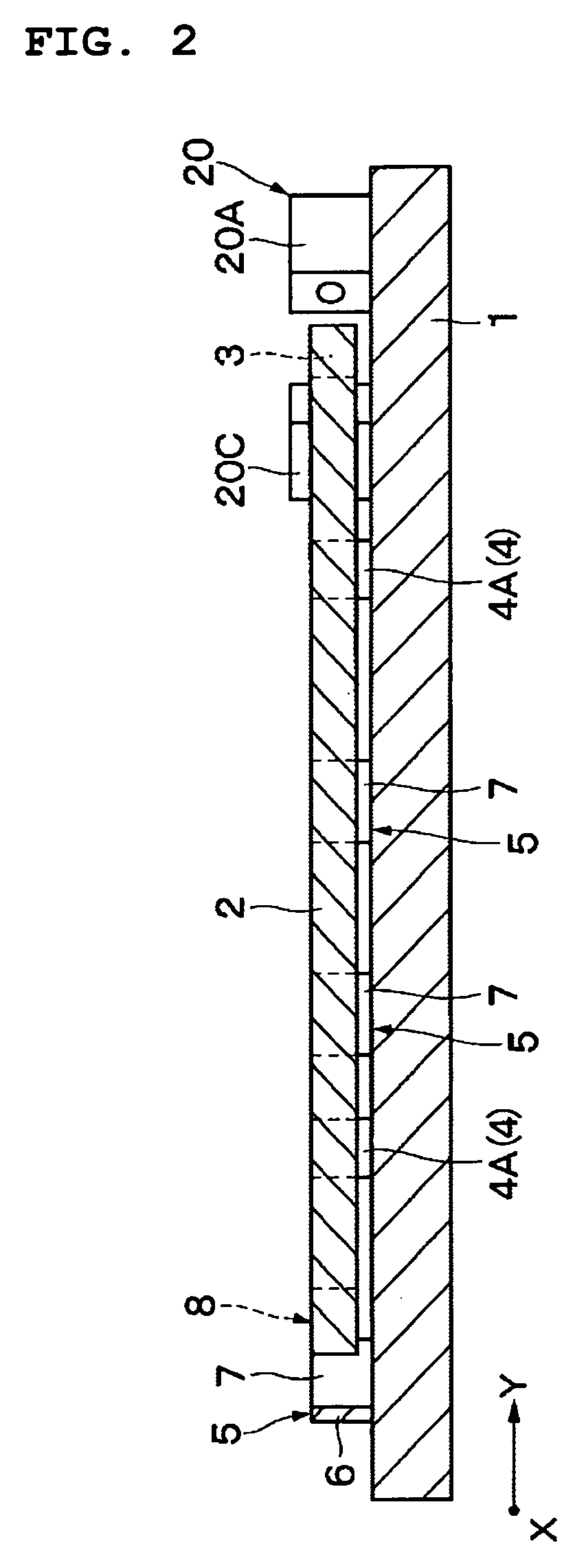
- The electrostatic actuator design features electrode plates of varying lengths, arranged in a comb-like pattern, where the movable piece is displaced by sequential meshing of electrode plates with increasing length differences, minimizing overlapping lengths and balancing electrostatic forces to prevent inclination and ensure stable displacement.

Electrostatic Actuator with Tri-Electrode Topology
PatentInactiveUS20190036463A1
Innovation
- A tri-electrode electrostatic actuator design featuring a perforated intermediate electrode between the stationary drive electrode and movable MEMS structure, where a variable control voltage applied to the intermediate electrode modulates the electric field, reducing the control voltage required for displacement control.


Manufacturing Standards for Micro-Electromechanical Systems
The manufacturing of electrostatic actuators for micro-robotics applications requires adherence to stringent MEMS manufacturing standards that ensure both precision and reliability. Current industry standards primarily follow ISO 14999 series for MEMS devices, which establishes fundamental requirements for dimensional accuracy, surface roughness, and material properties. These standards mandate tolerances within nanometer ranges for critical dimensions, particularly important for electrostatic gap spacing that directly affects actuator performance.
Silicon-based fabrication processes dominate the manufacturing landscape, utilizing established semiconductor fabrication standards adapted for MEMS applications. The IEEE 1621 standard provides guidelines for surface micromachining processes, while ASTM F2245 addresses material characterization requirements. These standards ensure consistent dielectric properties and mechanical stability across production batches, critical factors for electrostatic actuator reliability in micro-robotic systems.
Quality control protocols specifically address the unique challenges of electrostatic actuator manufacturing. Standards require comprehensive testing of breakdown voltage characteristics, capacitance uniformity, and mechanical resonance frequencies. The IEC 62047 series establishes testing methodologies for MEMS devices, including environmental stress testing and long-term reliability assessment protocols that validate actuator performance under operational conditions.
Packaging standards present particular challenges for micro-robotic applications where space constraints are paramount. The JEDEC JEP148 standard addresses hermetic sealing requirements, while custom packaging solutions often require deviation from standard approaches to accommodate the specific geometric and electrical requirements of integrated micro-robotic systems.
Emerging standards development focuses on multi-material integration and 3D manufacturing techniques that enable more sophisticated electrostatic actuator designs. The ongoing development of ISO/IEC 29181 series addresses heterogeneous integration challenges, providing frameworks for combining different materials and manufacturing processes while maintaining quality and reliability standards essential for precision micro-robotic applications.
Silicon-based fabrication processes dominate the manufacturing landscape, utilizing established semiconductor fabrication standards adapted for MEMS applications. The IEEE 1621 standard provides guidelines for surface micromachining processes, while ASTM F2245 addresses material characterization requirements. These standards ensure consistent dielectric properties and mechanical stability across production batches, critical factors for electrostatic actuator reliability in micro-robotic systems.
Quality control protocols specifically address the unique challenges of electrostatic actuator manufacturing. Standards require comprehensive testing of breakdown voltage characteristics, capacitance uniformity, and mechanical resonance frequencies. The IEC 62047 series establishes testing methodologies for MEMS devices, including environmental stress testing and long-term reliability assessment protocols that validate actuator performance under operational conditions.
Packaging standards present particular challenges for micro-robotic applications where space constraints are paramount. The JEDEC JEP148 standard addresses hermetic sealing requirements, while custom packaging solutions often require deviation from standard approaches to accommodate the specific geometric and electrical requirements of integrated micro-robotic systems.
Emerging standards development focuses on multi-material integration and 3D manufacturing techniques that enable more sophisticated electrostatic actuator designs. The ongoing development of ISO/IEC 29181 series addresses heterogeneous integration challenges, providing frameworks for combining different materials and manufacturing processes while maintaining quality and reliability standards essential for precision micro-robotic applications.
Energy Efficiency Optimization in Micro-Actuator Design
Energy efficiency optimization represents a critical design paradigm in micro-actuator development, particularly for electrostatic actuators deployed in precision micro-robotics applications. The miniaturized scale of these systems demands exceptional power management strategies, as energy consumption directly impacts operational duration, thermal management, and overall system performance. Traditional scaling approaches often result in diminished efficiency ratios, necessitating innovative design methodologies that prioritize energy conservation while maintaining precise actuation capabilities.
The fundamental challenge lies in balancing actuation force requirements with power consumption constraints. Electrostatic actuators inherently consume minimal steady-state power due to their capacitive nature, yet dynamic operations and switching frequencies can significantly impact energy budgets. Advanced electrode geometries, such as interdigitated comb drives and curved electrode configurations, offer improved force-to-voltage ratios, thereby reducing energy requirements for equivalent actuation performance.
Material selection plays a pivotal role in energy optimization strategies. Low-loss dielectric materials minimize energy dissipation during charging cycles, while high-permittivity substrates enhance electrostatic field strength at reduced operating voltages. Silicon-on-insulator platforms and specialized polymer composites demonstrate superior energy efficiency characteristics compared to conventional silicon-based designs.
Control algorithm optimization emerges as a crucial factor in energy management. Pulse-width modulation techniques, adaptive voltage scaling, and predictive control strategies can reduce average power consumption by up to 40% compared to continuous actuation methods. Smart switching protocols that leverage the actuator's natural resonance frequencies further enhance energy efficiency while maintaining positioning accuracy.
Parasitic capacitance minimization through optimized layout designs and advanced fabrication techniques contributes significantly to energy conservation. Three-dimensional electrode structures and novel gap-closing mechanisms enable higher force densities at lower operating voltages, directly translating to improved energy efficiency metrics in practical micro-robotic applications.
The fundamental challenge lies in balancing actuation force requirements with power consumption constraints. Electrostatic actuators inherently consume minimal steady-state power due to their capacitive nature, yet dynamic operations and switching frequencies can significantly impact energy budgets. Advanced electrode geometries, such as interdigitated comb drives and curved electrode configurations, offer improved force-to-voltage ratios, thereby reducing energy requirements for equivalent actuation performance.
Material selection plays a pivotal role in energy optimization strategies. Low-loss dielectric materials minimize energy dissipation during charging cycles, while high-permittivity substrates enhance electrostatic field strength at reduced operating voltages. Silicon-on-insulator platforms and specialized polymer composites demonstrate superior energy efficiency characteristics compared to conventional silicon-based designs.
Control algorithm optimization emerges as a crucial factor in energy management. Pulse-width modulation techniques, adaptive voltage scaling, and predictive control strategies can reduce average power consumption by up to 40% compared to continuous actuation methods. Smart switching protocols that leverage the actuator's natural resonance frequencies further enhance energy efficiency while maintaining positioning accuracy.
Parasitic capacitance minimization through optimized layout designs and advanced fabrication techniques contributes significantly to energy conservation. Three-dimensional electrode structures and novel gap-closing mechanisms enable higher force densities at lower operating voltages, directly translating to improved energy efficiency metrics in practical micro-robotic applications.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!