

Feedback Linearization and Optimal Control: Achieving Zero Steady-State Error
MAR 27, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Feedback Linearization Control Background and Objectives
Feedback linearization represents a fundamental paradigm shift in nonlinear control theory, emerging from the recognition that traditional linear control methods often fail to adequately address the complexities inherent in nonlinear dynamical systems. This control methodology transforms nonlinear system dynamics into equivalent linear forms through strategic coordinate transformations and feedback mechanisms, enabling the application of well-established linear control techniques to inherently nonlinear processes.
The historical development of feedback linearization traces back to the 1980s when researchers began exploring differential geometric approaches to control theory. Early pioneers recognized that many nonlinear systems could be rendered linear through appropriate state transformations and nonlinear feedback laws. This breakthrough opened new possibilities for controlling complex systems ranging from robotic manipulators to aerospace vehicles, where nonlinear dynamics dominate system behavior.
The evolution of this field has been marked by significant theoretical advances, including the development of input-output linearization, state feedback linearization, and dynamic extension techniques. These methodologies have progressively expanded the class of systems amenable to linearization-based control, addressing increasingly sophisticated engineering challenges across diverse industrial sectors.
Contemporary applications of feedback linearization span numerous domains, including automotive systems, power electronics, chemical processes, and biomedical devices. The technique has proven particularly valuable in scenarios where precise tracking performance and disturbance rejection are critical requirements, such as in high-precision manufacturing equipment and autonomous vehicle control systems.
The primary objective of integrating feedback linearization with optimal control strategies centers on achieving zero steady-state error while maintaining system stability and performance robustness. This integration addresses a fundamental limitation of classical feedback linearization, which, while effective at system linearization, may not inherently guarantee optimal performance or complete error elimination under varying operating conditions.
Zero steady-state error achievement represents a critical performance metric in control systems, ensuring that the system output converges precisely to desired reference values without persistent deviations. This objective becomes particularly challenging in nonlinear systems subject to uncertainties, disturbances, and modeling inaccuracies, where traditional control approaches may exhibit suboptimal performance.
The convergence of feedback linearization and optimal control methodologies aims to leverage the structural advantages of linearization while incorporating optimality principles that minimize performance indices and guarantee asymptotic tracking accuracy. This synthesis represents a significant advancement in control theory, offering enhanced performance guarantees for complex nonlinear systems operating in demanding environments.
The historical development of feedback linearization traces back to the 1980s when researchers began exploring differential geometric approaches to control theory. Early pioneers recognized that many nonlinear systems could be rendered linear through appropriate state transformations and nonlinear feedback laws. This breakthrough opened new possibilities for controlling complex systems ranging from robotic manipulators to aerospace vehicles, where nonlinear dynamics dominate system behavior.
The evolution of this field has been marked by significant theoretical advances, including the development of input-output linearization, state feedback linearization, and dynamic extension techniques. These methodologies have progressively expanded the class of systems amenable to linearization-based control, addressing increasingly sophisticated engineering challenges across diverse industrial sectors.
Contemporary applications of feedback linearization span numerous domains, including automotive systems, power electronics, chemical processes, and biomedical devices. The technique has proven particularly valuable in scenarios where precise tracking performance and disturbance rejection are critical requirements, such as in high-precision manufacturing equipment and autonomous vehicle control systems.
The primary objective of integrating feedback linearization with optimal control strategies centers on achieving zero steady-state error while maintaining system stability and performance robustness. This integration addresses a fundamental limitation of classical feedback linearization, which, while effective at system linearization, may not inherently guarantee optimal performance or complete error elimination under varying operating conditions.
Zero steady-state error achievement represents a critical performance metric in control systems, ensuring that the system output converges precisely to desired reference values without persistent deviations. This objective becomes particularly challenging in nonlinear systems subject to uncertainties, disturbances, and modeling inaccuracies, where traditional control approaches may exhibit suboptimal performance.
The convergence of feedback linearization and optimal control methodologies aims to leverage the structural advantages of linearization while incorporating optimality principles that minimize performance indices and guarantee asymptotic tracking accuracy. This synthesis represents a significant advancement in control theory, offering enhanced performance guarantees for complex nonlinear systems operating in demanding environments.
Market Demand for Zero Error Control Systems
The global market for zero steady-state error control systems is experiencing unprecedented growth driven by the increasing demand for precision in industrial automation, aerospace applications, and advanced manufacturing processes. Industries requiring high-precision positioning, such as semiconductor fabrication, medical device manufacturing, and robotics, are particularly driving this demand as they cannot tolerate even minimal deviations from target specifications.
Manufacturing sectors are increasingly adopting zero error control systems to meet stringent quality standards and reduce waste. The automotive industry, particularly in electric vehicle production, requires precise control of battery assembly processes and motor control systems where steady-state errors can significantly impact performance and safety. Similarly, the pharmaceutical industry demands exact dosing and mixing processes where feedback linearization techniques ensure consistent product quality.
The aerospace and defense sectors represent substantial market opportunities for zero error control technologies. Flight control systems, satellite positioning mechanisms, and missile guidance systems all require absolute precision where steady-state errors could result in mission failure or safety hazards. These applications are willing to invest significantly in advanced control solutions that guarantee zero steady-state error performance.
Emerging applications in renewable energy systems are creating new market segments for precision control technologies. Wind turbine blade pitch control, solar panel tracking systems, and grid synchronization mechanisms all benefit from feedback linearization approaches that eliminate steady-state errors, thereby maximizing energy conversion efficiency and system reliability.
The industrial Internet of Things and Industry 4.0 initiatives are accelerating market adoption of sophisticated control systems. Smart factories require interconnected systems that maintain precise coordination without cumulative errors, making zero steady-state error control essential for maintaining overall system performance and preventing cascading failures across production lines.
Market growth is also fueled by increasing regulatory requirements across various industries. Safety-critical applications in nuclear power, chemical processing, and medical equipment are subject to strict performance standards that often mandate zero tolerance for steady-state control errors, creating mandatory rather than optional demand for these advanced control solutions.
Manufacturing sectors are increasingly adopting zero error control systems to meet stringent quality standards and reduce waste. The automotive industry, particularly in electric vehicle production, requires precise control of battery assembly processes and motor control systems where steady-state errors can significantly impact performance and safety. Similarly, the pharmaceutical industry demands exact dosing and mixing processes where feedback linearization techniques ensure consistent product quality.
The aerospace and defense sectors represent substantial market opportunities for zero error control technologies. Flight control systems, satellite positioning mechanisms, and missile guidance systems all require absolute precision where steady-state errors could result in mission failure or safety hazards. These applications are willing to invest significantly in advanced control solutions that guarantee zero steady-state error performance.
Emerging applications in renewable energy systems are creating new market segments for precision control technologies. Wind turbine blade pitch control, solar panel tracking systems, and grid synchronization mechanisms all benefit from feedback linearization approaches that eliminate steady-state errors, thereby maximizing energy conversion efficiency and system reliability.
The industrial Internet of Things and Industry 4.0 initiatives are accelerating market adoption of sophisticated control systems. Smart factories require interconnected systems that maintain precise coordination without cumulative errors, making zero steady-state error control essential for maintaining overall system performance and preventing cascading failures across production lines.
Market growth is also fueled by increasing regulatory requirements across various industries. Safety-critical applications in nuclear power, chemical processing, and medical equipment are subject to strict performance standards that often mandate zero tolerance for steady-state control errors, creating mandatory rather than optional demand for these advanced control solutions.
Current State and Challenges in Nonlinear Control
Nonlinear control systems present fundamental challenges that distinguish them from their linear counterparts, particularly in achieving zero steady-state error through feedback linearization and optimal control strategies. The inherent complexity of nonlinear dynamics creates multiple equilibrium points, limit cycles, and chaotic behaviors that cannot be adequately addressed using traditional linear control methodologies. Current approaches struggle with the mathematical complexity of transforming nonlinear systems into equivalent linear forms while maintaining system stability and performance guarantees.
The primary technical obstacle lies in the exact feedback linearization process, which requires precise knowledge of system dynamics and often fails when model uncertainties or external disturbances are present. Many existing solutions rely on approximate linearization techniques that introduce modeling errors, subsequently compromising the achievement of zero steady-state error. The computational burden associated with real-time implementation of optimal control algorithms for nonlinear systems remains a significant constraint, particularly in resource-limited embedded applications.
Geographically, research leadership is concentrated in North America and Europe, with institutions like MIT, Stanford, and ETH Zurich driving theoretical advances. Asian research centers, particularly in Japan and South Korea, focus more on practical implementation challenges in robotics and automotive applications. This geographical distribution creates knowledge gaps in translating theoretical breakthroughs into commercially viable solutions.
Current methodologies face limitations in handling input constraints, actuator saturation, and time-varying parameters that are common in real-world applications. The robustness of feedback linearization controllers degrades significantly when system parameters deviate from nominal values, leading to performance deterioration and potential instability. Additionally, the requirement for full-state feedback in many optimal control formulations creates practical implementation challenges when not all system states are measurable.
The integration of machine learning techniques with traditional nonlinear control approaches shows promise but introduces new challenges related to training data requirements, generalization capabilities, and real-time performance guarantees. These hybrid approaches must balance the adaptability of learning-based methods with the theoretical rigor required for safety-critical applications, creating a complex design space that current solutions have not fully explored.
The primary technical obstacle lies in the exact feedback linearization process, which requires precise knowledge of system dynamics and often fails when model uncertainties or external disturbances are present. Many existing solutions rely on approximate linearization techniques that introduce modeling errors, subsequently compromising the achievement of zero steady-state error. The computational burden associated with real-time implementation of optimal control algorithms for nonlinear systems remains a significant constraint, particularly in resource-limited embedded applications.
Geographically, research leadership is concentrated in North America and Europe, with institutions like MIT, Stanford, and ETH Zurich driving theoretical advances. Asian research centers, particularly in Japan and South Korea, focus more on practical implementation challenges in robotics and automotive applications. This geographical distribution creates knowledge gaps in translating theoretical breakthroughs into commercially viable solutions.
Current methodologies face limitations in handling input constraints, actuator saturation, and time-varying parameters that are common in real-world applications. The robustness of feedback linearization controllers degrades significantly when system parameters deviate from nominal values, leading to performance deterioration and potential instability. Additionally, the requirement for full-state feedback in many optimal control formulations creates practical implementation challenges when not all system states are measurable.
The integration of machine learning techniques with traditional nonlinear control approaches shows promise but introduces new challenges related to training data requirements, generalization capabilities, and real-time performance guarantees. These hybrid approaches must balance the adaptability of learning-based methods with the theoretical rigor required for safety-critical applications, creating a complex design space that current solutions have not fully explored.
Existing Feedback Linearization Control Solutions
01 Feedback linearization control for nonlinear systems
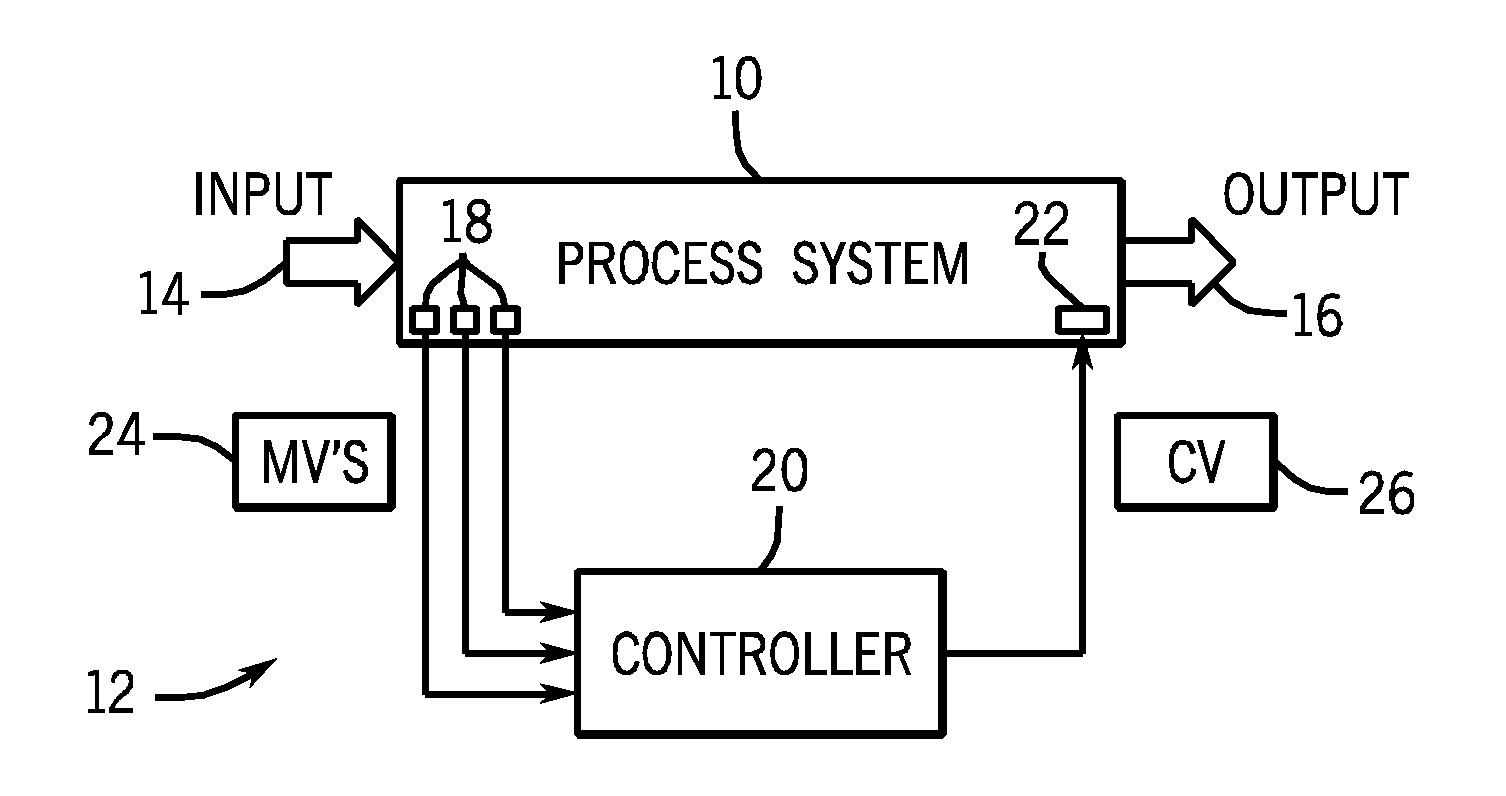
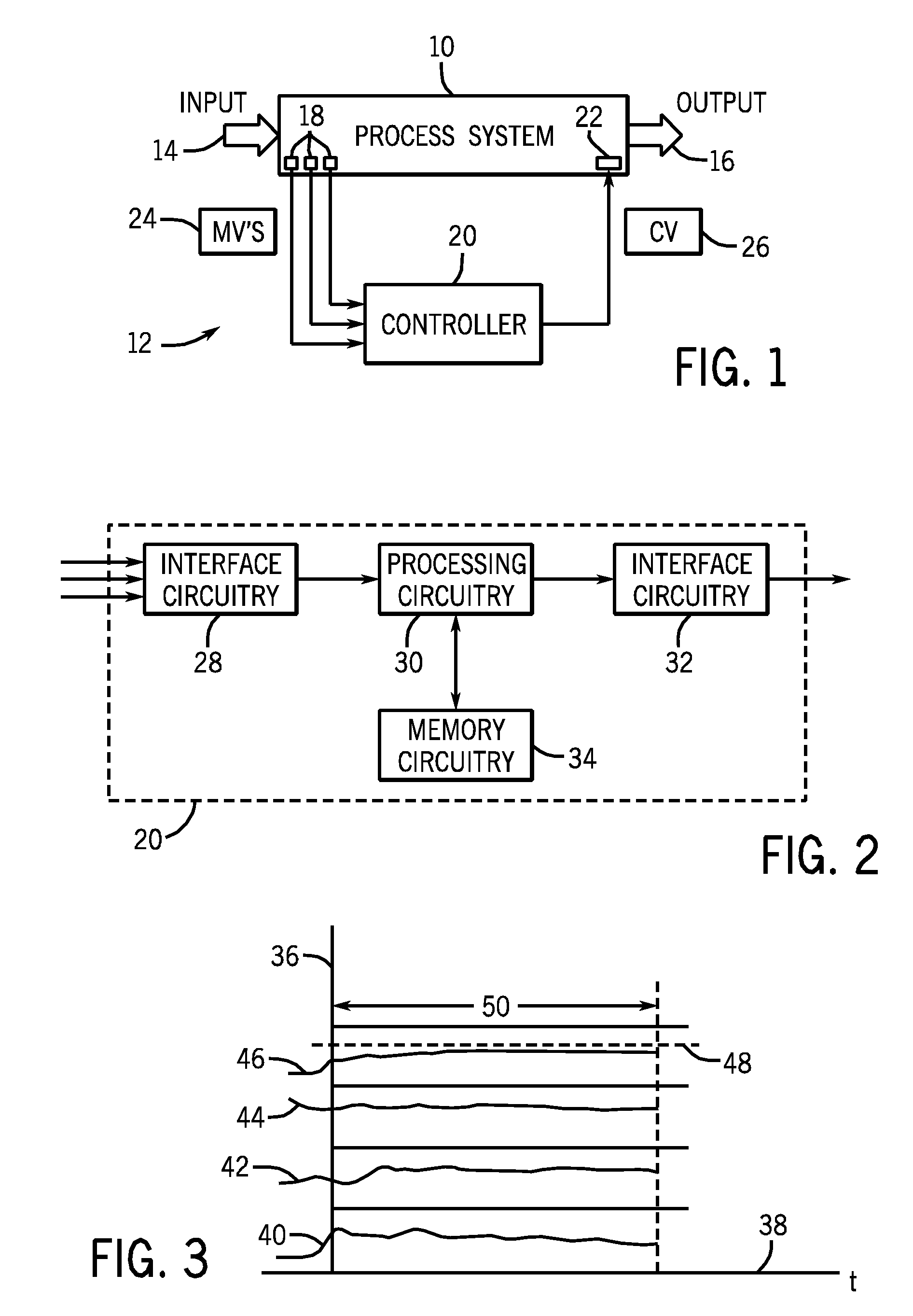
Feedback linearization is a control technique that transforms nonlinear system dynamics into linear ones through coordinate transformation and state feedback. This approach enables the application of linear control theory to nonlinear systems, facilitating the design of controllers that can achieve desired performance characteristics. The method involves calculating appropriate feedback laws that cancel nonlinearities in the system model, allowing for precise tracking and regulation.- Feedback linearization control for nonlinear systems: Feedback linearization is a control technique that transforms nonlinear system dynamics into linear ones through coordinate transformation and state feedback. This approach enables the application of linear control theory to nonlinear systems, facilitating the design of controllers that can achieve desired performance characteristics. The method involves calculating appropriate feedback laws that cancel nonlinearities in the system model, allowing for precise trajectory tracking and stability guarantees.
- Integral action and disturbance compensation for zero steady-state error: Achieving zero steady-state error requires incorporating integral control action or disturbance observers into the control system. These techniques compensate for constant disturbances, model uncertainties, and parameter variations that would otherwise cause persistent tracking errors. The integral component accumulates error over time and adjusts the control signal to eliminate steady-state deviations, while disturbance observers estimate and compensate for unknown external influences on the system.
- Optimal control design with performance index optimization: Optimal control methods minimize a performance index that balances tracking accuracy, control effort, and other system objectives. These approaches, including linear quadratic regulators and model predictive control, systematically determine control laws that optimize system behavior according to specified criteria. The optimization process considers constraints on states and inputs while ensuring stability and robustness of the closed-loop system.
- Adaptive control for parameter uncertainty handling: Adaptive control strategies adjust controller parameters in real-time to accommodate system uncertainties and time-varying dynamics. These methods estimate unknown parameters or adapt control gains based on system performance, ensuring robust operation despite modeling errors or changing operating conditions. Adaptive mechanisms can be combined with feedback linearization to maintain control effectiveness when system characteristics deviate from nominal values.
- Sliding mode control for robust tracking performance: Sliding mode control provides robust tracking and disturbance rejection by forcing system trajectories onto a predefined sliding surface where desired dynamics are maintained. This approach offers inherent robustness to matched uncertainties and can achieve finite-time convergence to the desired state. When combined with appropriate integral sliding surfaces, the method ensures zero steady-state error while maintaining insensitivity to parameter variations and external disturbances.
02 Integral action and disturbance rejection for zero steady-state error
Achieving zero steady-state error requires the incorporation of integral control action or disturbance observers into the control system. These techniques compensate for constant disturbances and model uncertainties by accumulating error over time. The integral component ensures that persistent errors are eliminated in steady state, while disturbance observers estimate and compensate for unknown external influences on the system.Expand Specific Solutions03 Optimal control design with performance indices
Optimal control methods minimize performance indices such as quadratic cost functions that balance tracking error and control effort. These approaches systematically determine control laws that optimize system behavior according to specified criteria. Linear quadratic regulator and model predictive control are common frameworks that provide optimal solutions while considering system constraints and performance requirements.Expand Specific Solutions04 Adaptive control for parameter uncertainty compensation
Adaptive control strategies adjust controller parameters in real-time to compensate for system uncertainties and parameter variations. These methods estimate unknown system parameters or adapt control gains to maintain desired performance despite changes in operating conditions. Adaptive mechanisms can be combined with feedback linearization to handle both structural nonlinearities and parametric uncertainties simultaneously.Expand Specific Solutions05 Sliding mode control for robust tracking
Sliding mode control provides robust performance against uncertainties and disturbances by forcing system trajectories onto a predefined sliding surface. This approach offers finite-time convergence and insensitivity to matched uncertainties. When combined with feedback linearization, sliding mode control can achieve both linearization of nominal dynamics and robustness to modeling errors, ensuring accurate tracking with zero steady-state error.Expand Specific Solutions
Key Players in Advanced Control Systems Industry
The feedback linearization and optimal control field for achieving zero steady-state error represents a mature control systems technology experiencing steady growth across industrial automation and automotive sectors. The market demonstrates significant expansion driven by increasing demand for precision control in manufacturing, robotics, and autonomous systems. Technology maturity varies considerably among key players, with established industrial giants like Siemens, Rockwell Automation, and Texas Instruments leading commercial implementations, while automotive manufacturers Honda and Nissan focus on vehicle control applications. Academic institutions including Institute of Science Tokyo, Beijing Institute of Technology, and Northwestern Polytechnical University drive fundamental research advancement. The competitive landscape shows a clear division between industrial automation companies commercializing proven solutions and research institutions developing next-generation algorithms, indicating a healthy ecosystem supporting both current applications and future innovations in precision control systems.
Honda Motor Co., Ltd.
Technical Solution: Honda applies feedback linearization and optimal control in their advanced driver assistance systems (ADAS) and autonomous vehicle development. Their technology focuses on vehicle dynamics control, implementing nonlinear feedback controllers for steering, braking, and powertrain systems. The solution achieves zero steady-state error in trajectory tracking and vehicle stability control through real-time optimization algorithms, with particular emphasis on hybrid and electric vehicle control systems where precise energy management is critical for performance and efficiency.
Strengths: Strong automotive engineering expertise with focus on safety-critical applications and hybrid/electric vehicle technology. Weaknesses: Limited application scope outside automotive domain, slower adaptation to emerging control technologies.
Rockwell Automation Technologies, Inc.
Technical Solution: Rockwell Automation implements feedback linearization through their ControlLogix platform with integrated model predictive control (MPC) algorithms. Their solution combines real-time feedback linearization with adaptive control strategies to achieve zero steady-state error in industrial automation systems. The technology utilizes advanced process models and disturbance rejection mechanisms, enabling precise control of nonlinear industrial processes such as chemical reactors and manufacturing systems with response times under 10ms.
Strengths: Industry-leading expertise in industrial automation with proven track record in harsh environments. Weaknesses: Solutions primarily focused on industrial applications, limited flexibility for emerging control domains.
Core Patents in Zero Steady-State Error Control
Model predictive control system and method for reduction of steady state error
PatentActiveUS20090005889A1
Innovation
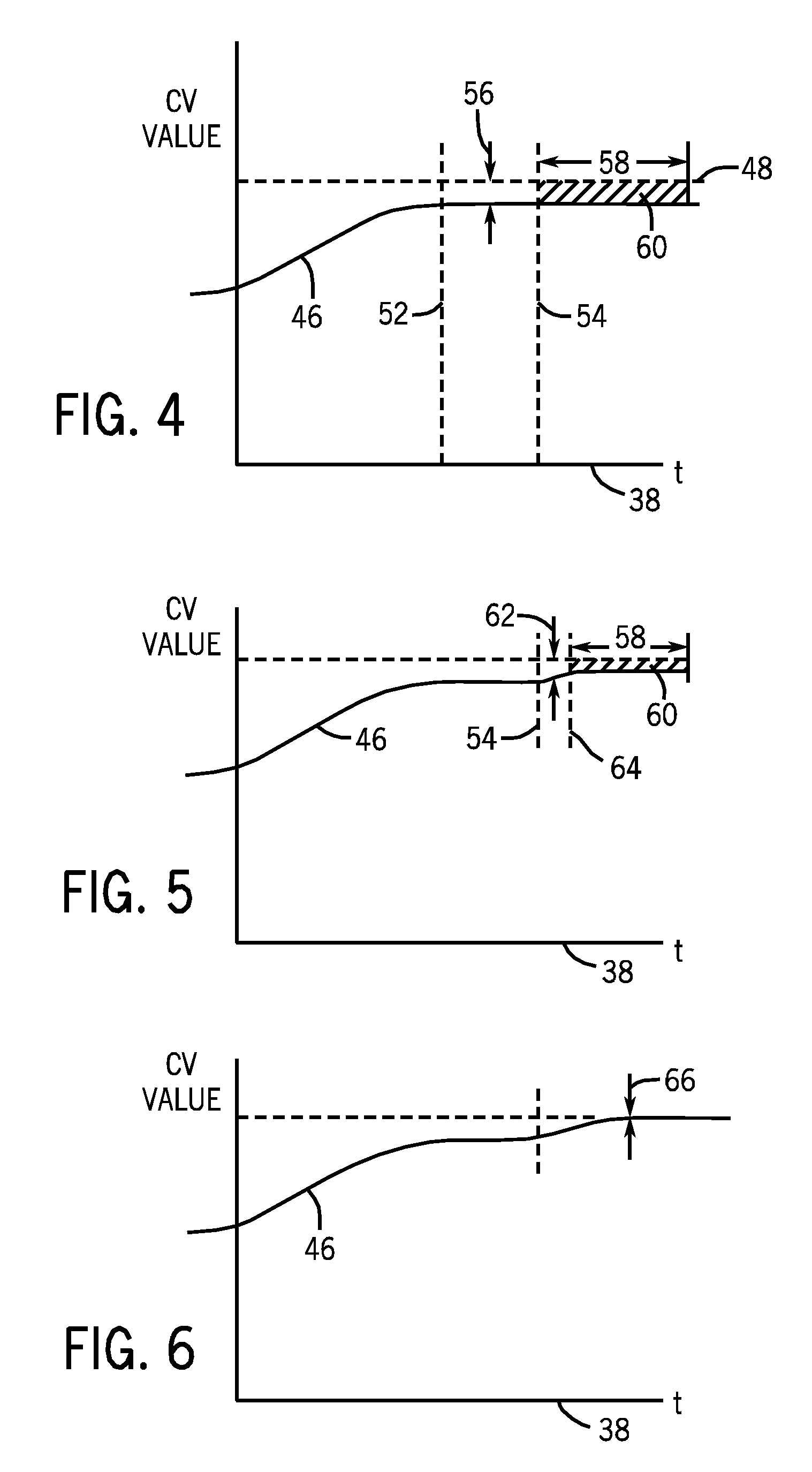
- The technique involves detecting steady state errors over a persistence time and modifying the model predictive control algorithm's cost function by increasing coefficients for variables not at the desired level, using the integral of the difference between the controlled variable and its desired level over a forward-looking control horizon to drive the variable to the desired level, thereby reducing the error.

Safety Standards for Critical Control Applications
Safety standards for critical control applications involving feedback linearization and optimal control systems represent a fundamental pillar in ensuring reliable operation across high-stakes industrial environments. These standards encompass comprehensive frameworks that address the unique challenges posed by nonlinear control systems where achieving zero steady-state error is paramount for operational safety.
The International Electrotechnical Commission (IEC) 61508 standard serves as the cornerstone for functional safety in electrical, electronic, and programmable electronic safety-related systems. This standard establishes Safety Integrity Levels (SIL) ranging from SIL 1 to SIL 4, with SIL 4 representing the highest level of safety integrity required for applications where failure could result in catastrophic consequences. For feedback linearization controllers, compliance with appropriate SIL levels necessitates rigorous verification of the linearization accuracy and robustness against model uncertainties.
Industry-specific safety standards further refine these requirements for particular applications. The ISO 26262 standard governs automotive functional safety, establishing Automotive Safety Integrity Levels (ASIL) that directly impact the design and validation of advanced driver assistance systems employing feedback linearization techniques. Similarly, the IEC 61511 standard addresses safety instrumented systems in the process industries, where optimal control strategies must maintain zero steady-state error while ensuring fail-safe operation under all credible fault conditions.
Certification processes for critical control applications demand extensive documentation of control system behavior under both normal and abnormal operating conditions. This includes comprehensive hazard analysis, failure mode and effects analysis (FMEA), and systematic verification that the feedback linearization algorithm maintains stability margins even when system parameters deviate from nominal values. The certification bodies require demonstration that optimal control objectives do not compromise safety functions.
Compliance verification involves rigorous testing protocols that validate controller performance across the entire operational envelope. These protocols must demonstrate that zero steady-state error achievement does not introduce unsafe transient behaviors or compromise system stability during emergency scenarios. Regular safety assessments and periodic recertification ensure continued compliance throughout the system lifecycle, particularly as control algorithms undergo updates or modifications.
The International Electrotechnical Commission (IEC) 61508 standard serves as the cornerstone for functional safety in electrical, electronic, and programmable electronic safety-related systems. This standard establishes Safety Integrity Levels (SIL) ranging from SIL 1 to SIL 4, with SIL 4 representing the highest level of safety integrity required for applications where failure could result in catastrophic consequences. For feedback linearization controllers, compliance with appropriate SIL levels necessitates rigorous verification of the linearization accuracy and robustness against model uncertainties.
Industry-specific safety standards further refine these requirements for particular applications. The ISO 26262 standard governs automotive functional safety, establishing Automotive Safety Integrity Levels (ASIL) that directly impact the design and validation of advanced driver assistance systems employing feedback linearization techniques. Similarly, the IEC 61511 standard addresses safety instrumented systems in the process industries, where optimal control strategies must maintain zero steady-state error while ensuring fail-safe operation under all credible fault conditions.
Certification processes for critical control applications demand extensive documentation of control system behavior under both normal and abnormal operating conditions. This includes comprehensive hazard analysis, failure mode and effects analysis (FMEA), and systematic verification that the feedback linearization algorithm maintains stability margins even when system parameters deviate from nominal values. The certification bodies require demonstration that optimal control objectives do not compromise safety functions.
Compliance verification involves rigorous testing protocols that validate controller performance across the entire operational envelope. These protocols must demonstrate that zero steady-state error achievement does not introduce unsafe transient behaviors or compromise system stability during emergency scenarios. Regular safety assessments and periodic recertification ensure continued compliance throughout the system lifecycle, particularly as control algorithms undergo updates or modifications.
Computational Requirements for Real-Time Implementation
The computational requirements for real-time implementation of feedback linearization and optimal control systems present significant challenges that must be carefully addressed to achieve zero steady-state error performance. The primary computational burden stems from the need to solve complex nonlinear algebraic equations and differential equations within strict timing constraints, typically requiring sampling frequencies ranging from 1 kHz to 100 kHz depending on system dynamics.
Matrix operations constitute the most computationally intensive component, particularly the real-time calculation of the decoupling matrix and its inverse for feedback linearization. For an n-dimensional nonlinear system, the computational complexity scales as O(n³) for matrix inversion operations, which must be executed at each control cycle. Modern embedded processors with dedicated floating-point units and parallel processing capabilities are essential to meet these demands.
Memory requirements are equally critical, as the control algorithm must store system state histories, reference trajectories, and intermediate calculation results. Typical implementations require 512 KB to 4 MB of RAM, depending on system complexity and prediction horizons. The optimal control component adds additional computational overhead through iterative optimization algorithms, often requiring 50-200 iterations per control cycle to converge to acceptable solutions.
Hardware acceleration through Field-Programmable Gate Arrays (FPGAs) or Graphics Processing Units (GPUs) has emerged as a viable solution for computationally demanding applications. These platforms can achieve parallel execution of matrix operations and differential equation solvers, reducing computation time by factors of 10-100 compared to traditional microprocessors.
Real-time operating systems with deterministic scheduling are mandatory to ensure consistent timing performance. Jitter in control loop execution can significantly degrade steady-state error performance, making hard real-time guarantees essential. Modern implementations typically target worst-case execution times below 10% of the sampling period to maintain system stability and performance specifications.
Matrix operations constitute the most computationally intensive component, particularly the real-time calculation of the decoupling matrix and its inverse for feedback linearization. For an n-dimensional nonlinear system, the computational complexity scales as O(n³) for matrix inversion operations, which must be executed at each control cycle. Modern embedded processors with dedicated floating-point units and parallel processing capabilities are essential to meet these demands.
Memory requirements are equally critical, as the control algorithm must store system state histories, reference trajectories, and intermediate calculation results. Typical implementations require 512 KB to 4 MB of RAM, depending on system complexity and prediction horizons. The optimal control component adds additional computational overhead through iterative optimization algorithms, often requiring 50-200 iterations per control cycle to converge to acceptable solutions.
Hardware acceleration through Field-Programmable Gate Arrays (FPGAs) or Graphics Processing Units (GPUs) has emerged as a viable solution for computationally demanding applications. These platforms can achieve parallel execution of matrix operations and differential equation solvers, reducing computation time by factors of 10-100 compared to traditional microprocessors.
Real-time operating systems with deterministic scheduling are mandatory to ensure consistent timing performance. Jitter in control loop execution can significantly degrade steady-state error performance, making hard real-time guarantees essential. Modern implementations typically target worst-case execution times below 10% of the sampling period to maintain system stability and performance specifications.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!