

How to Mitigate EMI Concerns for Robot Skin Electronics
APR 17, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Robot Skin EMI Mitigation Background and Objectives
Robot skin electronics represent a revolutionary advancement in robotics technology, enabling machines to perceive and interact with their environment through tactile sensing capabilities. These flexible electronic systems integrate sensors, actuators, and processing units directly into the robot's surface, creating an artificial sensory layer that mimics biological skin functions. The technology encompasses various sensing modalities including pressure, temperature, texture, and proximity detection, fundamentally transforming how robots can perform delicate manipulation tasks and human-robot interactions.
The development of robot skin electronics has evolved from early rigid sensor arrays to sophisticated flexible and stretchable electronic systems. Initial implementations focused on discrete sensor placement, but modern approaches emphasize seamless integration of sensing elements across large surface areas. This evolution has been driven by advances in flexible electronics, nanomaterials, and manufacturing processes that enable the creation of skin-like electronic systems capable of conforming to complex three-dimensional surfaces.
However, the integration of dense electronic networks within robot skin introduces significant electromagnetic interference challenges that threaten system reliability and performance. EMI concerns arise from the close proximity of multiple electronic components, high-frequency switching circuits, and the potential for electromagnetic coupling between sensing elements and control systems. These interference issues can manifest as signal degradation, false sensor readings, cross-talk between channels, and reduced overall system sensitivity.
The primary objective of EMI mitigation in robot skin electronics is to ensure reliable and accurate sensing performance while maintaining the flexibility and conformability characteristics essential for tactile applications. This involves developing comprehensive shielding strategies, optimizing circuit layouts, implementing proper grounding techniques, and establishing robust signal processing algorithms that can distinguish between genuine tactile signals and electromagnetic noise.
Current research efforts focus on achieving seamless integration of EMI mitigation techniques without compromising the mechanical properties of the robot skin. The challenge lies in balancing electromagnetic compatibility requirements with the need for lightweight, flexible, and cost-effective solutions that can be manufactured at scale. Success in this area will enable the deployment of robot skin electronics in demanding applications including medical robotics, industrial automation, and consumer robotics where electromagnetic environments are complex and unpredictable.
The development of robot skin electronics has evolved from early rigid sensor arrays to sophisticated flexible and stretchable electronic systems. Initial implementations focused on discrete sensor placement, but modern approaches emphasize seamless integration of sensing elements across large surface areas. This evolution has been driven by advances in flexible electronics, nanomaterials, and manufacturing processes that enable the creation of skin-like electronic systems capable of conforming to complex three-dimensional surfaces.
However, the integration of dense electronic networks within robot skin introduces significant electromagnetic interference challenges that threaten system reliability and performance. EMI concerns arise from the close proximity of multiple electronic components, high-frequency switching circuits, and the potential for electromagnetic coupling between sensing elements and control systems. These interference issues can manifest as signal degradation, false sensor readings, cross-talk between channels, and reduced overall system sensitivity.
The primary objective of EMI mitigation in robot skin electronics is to ensure reliable and accurate sensing performance while maintaining the flexibility and conformability characteristics essential for tactile applications. This involves developing comprehensive shielding strategies, optimizing circuit layouts, implementing proper grounding techniques, and establishing robust signal processing algorithms that can distinguish between genuine tactile signals and electromagnetic noise.
Current research efforts focus on achieving seamless integration of EMI mitigation techniques without compromising the mechanical properties of the robot skin. The challenge lies in balancing electromagnetic compatibility requirements with the need for lightweight, flexible, and cost-effective solutions that can be manufactured at scale. Success in this area will enable the deployment of robot skin electronics in demanding applications including medical robotics, industrial automation, and consumer robotics where electromagnetic environments are complex and unpredictable.
Market Demand for EMI-Resilient Robot Skin Systems
The global robotics industry is experiencing unprecedented growth, with service robots and collaborative robots (cobots) leading the charge in market expansion. This surge has created substantial demand for advanced tactile sensing capabilities, positioning robot skin electronics as a critical enabling technology. Healthcare robotics represents one of the most promising segments, where robots require sophisticated touch sensitivity for patient interaction, surgical assistance, and rehabilitation therapy. The aging global population and increasing healthcare costs are driving adoption of robotic solutions that can safely interact with humans through precise tactile feedback.
Industrial automation continues to evolve beyond traditional isolated robotic systems toward collaborative environments where robots work alongside human operators. This transformation necessitates robot skin systems that can detect contact, measure force, and respond appropriately to prevent injury while maintaining operational efficiency. Manufacturing sectors including automotive, electronics assembly, and food processing are actively seeking EMI-resilient tactile solutions to ensure reliable operation in electromagnetically noisy industrial environments.
The consumer robotics market is expanding rapidly, encompassing household service robots, eldercare assistants, and entertainment platforms. These applications demand cost-effective robot skin solutions that maintain performance reliability despite exposure to common household electromagnetic interference sources such as Wi-Fi networks, microwave ovens, and wireless charging systems. Market research indicates strong consumer preference for robots that can safely navigate and interact within domestic environments without compromising functionality due to EMI susceptibility.
Autonomous vehicle development has created additional demand for EMI-resilient tactile sensing systems. Self-driving cars require robust sensor networks that can operate reliably in complex electromagnetic environments including urban areas with dense wireless communications, industrial zones with high-power equipment, and transportation corridors with radar and communication systems. The automotive industry's stringent safety requirements and electromagnetic compatibility standards are driving demand for proven EMI mitigation solutions.
Military and defense applications represent a specialized but significant market segment requiring robot skin systems capable of operating in extreme electromagnetic environments. These applications often involve exposure to intentional jamming, high-power radar systems, and electronic warfare conditions where conventional tactile sensors may fail. The defense sector's willingness to invest in premium solutions creates opportunities for advanced EMI-resilient technologies.
Space exploration and harsh environment robotics constitute emerging market opportunities where electromagnetic interference from cosmic radiation, solar activity, and onboard electronic systems poses unique challenges. These applications require robot skin electronics with exceptional EMI resilience and long-term reliability under extreme conditions.
Industrial automation continues to evolve beyond traditional isolated robotic systems toward collaborative environments where robots work alongside human operators. This transformation necessitates robot skin systems that can detect contact, measure force, and respond appropriately to prevent injury while maintaining operational efficiency. Manufacturing sectors including automotive, electronics assembly, and food processing are actively seeking EMI-resilient tactile solutions to ensure reliable operation in electromagnetically noisy industrial environments.
The consumer robotics market is expanding rapidly, encompassing household service robots, eldercare assistants, and entertainment platforms. These applications demand cost-effective robot skin solutions that maintain performance reliability despite exposure to common household electromagnetic interference sources such as Wi-Fi networks, microwave ovens, and wireless charging systems. Market research indicates strong consumer preference for robots that can safely navigate and interact within domestic environments without compromising functionality due to EMI susceptibility.
Autonomous vehicle development has created additional demand for EMI-resilient tactile sensing systems. Self-driving cars require robust sensor networks that can operate reliably in complex electromagnetic environments including urban areas with dense wireless communications, industrial zones with high-power equipment, and transportation corridors with radar and communication systems. The automotive industry's stringent safety requirements and electromagnetic compatibility standards are driving demand for proven EMI mitigation solutions.
Military and defense applications represent a specialized but significant market segment requiring robot skin systems capable of operating in extreme electromagnetic environments. These applications often involve exposure to intentional jamming, high-power radar systems, and electronic warfare conditions where conventional tactile sensors may fail. The defense sector's willingness to invest in premium solutions creates opportunities for advanced EMI-resilient technologies.
Space exploration and harsh environment robotics constitute emerging market opportunities where electromagnetic interference from cosmic radiation, solar activity, and onboard electronic systems poses unique challenges. These applications require robot skin electronics with exceptional EMI resilience and long-term reliability under extreme conditions.
Current EMI Challenges in Robot Skin Electronics
Robot skin electronics face significant electromagnetic interference challenges that stem from their unique operational requirements and physical characteristics. These systems must maintain high sensitivity for tactile sensing while operating in electromagnetically noisy environments typical of robotic applications. The fundamental challenge lies in balancing the need for responsive sensor networks with robust EMI protection mechanisms.
The distributed nature of robot skin electronics creates multiple potential interference pathways. Unlike conventional electronic systems housed in shielded enclosures, robot skin sensors are spread across large surface areas with numerous interconnections. Each sensor node, communication line, and power distribution pathway represents a potential antenna for EMI pickup or emission. This distributed architecture makes traditional shielding approaches impractical and necessitates innovative EMI mitigation strategies.
Signal integrity degradation represents a critical challenge in robot skin applications. The low-amplitude signals generated by tactile sensors are particularly susceptible to electromagnetic noise, which can mask genuine sensory input or create false readings. This sensitivity is exacerbated by the proximity of robot skin electronics to motor drives, switching power supplies, and wireless communication systems that generate broadband electromagnetic emissions across multiple frequency ranges.
Power distribution networks in robot skin systems present additional EMI vulnerabilities. The extensive power delivery infrastructure required to support distributed sensor arrays creates ground loops and common-mode noise pathways. Voltage fluctuations and switching transients can propagate throughout the system, affecting sensor accuracy and potentially causing electromagnetic emissions that exceed regulatory limits.
Wireless communication interference poses another significant challenge for robot skin electronics. Many robotic systems rely on wireless protocols for sensor data transmission, but these communication channels are susceptible to interference from external sources and internal system noise. The challenge is compounded by the need for real-time data transmission with minimal latency, limiting the effectiveness of traditional error correction and retransmission protocols.
Manufacturing and integration constraints further complicate EMI mitigation efforts. Robot skin electronics must maintain flexibility, durability, and cost-effectiveness while incorporating EMI protection measures. Traditional EMI solutions such as metallic shielding or ferrite components may compromise the mechanical properties essential for tactile sensing applications, requiring innovative approaches that balance electromagnetic performance with functional requirements.
The distributed nature of robot skin electronics creates multiple potential interference pathways. Unlike conventional electronic systems housed in shielded enclosures, robot skin sensors are spread across large surface areas with numerous interconnections. Each sensor node, communication line, and power distribution pathway represents a potential antenna for EMI pickup or emission. This distributed architecture makes traditional shielding approaches impractical and necessitates innovative EMI mitigation strategies.
Signal integrity degradation represents a critical challenge in robot skin applications. The low-amplitude signals generated by tactile sensors are particularly susceptible to electromagnetic noise, which can mask genuine sensory input or create false readings. This sensitivity is exacerbated by the proximity of robot skin electronics to motor drives, switching power supplies, and wireless communication systems that generate broadband electromagnetic emissions across multiple frequency ranges.
Power distribution networks in robot skin systems present additional EMI vulnerabilities. The extensive power delivery infrastructure required to support distributed sensor arrays creates ground loops and common-mode noise pathways. Voltage fluctuations and switching transients can propagate throughout the system, affecting sensor accuracy and potentially causing electromagnetic emissions that exceed regulatory limits.
Wireless communication interference poses another significant challenge for robot skin electronics. Many robotic systems rely on wireless protocols for sensor data transmission, but these communication channels are susceptible to interference from external sources and internal system noise. The challenge is compounded by the need for real-time data transmission with minimal latency, limiting the effectiveness of traditional error correction and retransmission protocols.
Manufacturing and integration constraints further complicate EMI mitigation efforts. Robot skin electronics must maintain flexibility, durability, and cost-effectiveness while incorporating EMI protection measures. Traditional EMI solutions such as metallic shielding or ferrite components may compromise the mechanical properties essential for tactile sensing applications, requiring innovative approaches that balance electromagnetic performance with functional requirements.
Existing EMI Mitigation Approaches for Robot Skin
01 Conductive shielding materials for robot skin electronics
Incorporating conductive shielding materials into robot skin electronics can effectively reduce electromagnetic interference. These materials can be integrated as layers or coatings within the electronic skin structure to block or absorb electromagnetic radiation. Conductive polymers, metal meshes, and carbon-based materials are commonly used to create EMI shielding barriers while maintaining flexibility and sensitivity of the robotic skin.- Conductive shielding materials for robot skin electronics: Incorporating conductive shielding materials into robot skin electronics can effectively reduce electromagnetic interference. These materials can include conductive fabrics, metal meshes, or conductive polymers that form a protective barrier around sensitive electronic components. The shielding layer helps to block or absorb electromagnetic radiation, preventing it from interfering with the operation of sensors and circuits integrated into the robotic skin.
- Flexible circuit design with EMI suppression: Designing flexible circuits with built-in electromagnetic interference suppression features enables robot skin electronics to maintain functionality while minimizing signal disruption. This approach involves optimizing circuit layout, incorporating filtering components, and using specialized routing techniques to reduce electromagnetic emissions and susceptibility. The flexible nature of these circuits allows them to conform to curved surfaces while maintaining EMI protection.
- Grounding and isolation techniques for robotic systems: Implementing proper grounding and isolation techniques in robot skin electronics helps to minimize electromagnetic interference by providing controlled paths for unwanted currents and separating sensitive circuits from noise sources. These techniques include the use of ground planes, isolation barriers, and differential signaling methods that reduce the coupling of electromagnetic energy between different components and subsystems within the robotic platform.
- Electromagnetic compatibility in sensor integration: Ensuring electromagnetic compatibility when integrating multiple sensors into robot skin requires careful consideration of sensor placement, signal processing, and interference mitigation strategies. This involves selecting sensors with appropriate frequency characteristics, implementing filtering and shielding at the sensor level, and designing signal conditioning circuits that minimize cross-talk and electromagnetic coupling between adjacent sensing elements.
- Advanced materials for EMI reduction in flexible electronics: Utilizing advanced materials specifically engineered for electromagnetic interference reduction in flexible electronics provides enhanced protection for robot skin applications. These materials may include nanocomposites, conductive inks, or hybrid structures that combine mechanical flexibility with electromagnetic shielding properties. The materials can be integrated into substrates, encapsulation layers, or as standalone shielding components to create a comprehensive EMI protection system.
02 Grounding and circuit design optimization
Proper grounding techniques and optimized circuit layouts can minimize electromagnetic interference in robot skin electronics. Strategic placement of ground planes, careful routing of signal traces, and implementation of differential signaling can reduce EMI susceptibility. Circuit design considerations include minimizing loop areas, using appropriate filtering components, and implementing proper impedance matching to prevent electromagnetic coupling and radiation.Expand Specific Solutions03 Flexible EMI shielding structures
Development of flexible shielding structures specifically designed for conformable robot skin applications addresses both EMI protection and mechanical flexibility requirements. These structures utilize stretchable conductive materials, patterned shielding layers, or hybrid composite designs that maintain shielding effectiveness during deformation. The flexible nature allows the shielding to conform to curved surfaces and withstand repeated bending without compromising EMI protection performance.Expand Specific Solutions04 Signal filtering and isolation techniques
Implementation of filtering and isolation techniques at the component and system level can effectively suppress electromagnetic interference in robot skin electronics. These techniques include the use of ferrite beads, capacitive filters, and isolation transformers to prevent EMI from coupling into sensitive circuits. Active filtering methods and digital signal processing algorithms can also be employed to distinguish between genuine sensor signals and electromagnetic noise.Expand Specific Solutions05 Integrated sensor and shielding architectures
Advanced architectures that integrate sensing elements with EMI shielding structures provide comprehensive solutions for robot skin electronics. These designs incorporate shielding directly into the sensor array structure, creating multi-functional layers that simultaneously provide tactile sensing and electromagnetic protection. The integration approach optimizes space utilization, reduces overall thickness, and ensures consistent shielding coverage across the entire robot skin surface.Expand Specific Solutions
Key Players in Robot Skin and EMI Solutions Industry
The robot skin electronics EMI mitigation field represents an emerging technology sector at the intersection of robotics, flexible electronics, and electromagnetic compatibility. The industry is in its early development stage with significant growth potential driven by increasing demand for tactile sensing in robotics applications. Market size remains relatively small but expanding rapidly as robotic systems become more sophisticated and require advanced sensory capabilities. Technology maturity varies significantly across key players, with established electronics giants like Samsung Electronics, Intel Corp., and Apple Inc. leveraging their semiconductor expertise, while specialized companies such as Laird Technologies focus on EMI shielding solutions. Traditional robotics leaders like ABB Ltd. and emerging players like Shenzhen Dobot Corp. are integrating these technologies into their platforms. Component manufacturers including 3M Innovative Properties, TE Connectivity, and Littelfuse provide essential materials and protection devices. The competitive landscape shows a convergence of diverse industries, from consumer electronics to industrial automation, indicating the technology's broad applicability and commercial potential across multiple sectors.
3M Innovative Properties Co.
Technical Solution: 3M develops advanced EMI shielding materials including conductive tapes, gaskets, and absorber materials specifically designed for flexible electronics applications. Their solutions utilize silver-filled conductive adhesives and copper-nickel-silver plated fabrics that maintain conductivity under mechanical stress. The company's EMI shielding effectiveness typically ranges from 60-100dB across frequency bands from 1MHz to 18GHz. For robot skin applications, 3M offers ultra-thin flexible shielding films with thickness as low as 0.05mm while maintaining excellent conformability to curved surfaces. Their materials demonstrate superior adhesion properties and can withstand repeated flexing cycles exceeding 100,000 bends without performance degradation.
Strengths: Extensive material science expertise, proven flexible electronics solutions, excellent conformability. Weaknesses: Higher material costs, limited integration with sensing electronics.
ABB Ltd.
Technical Solution: ABB implements comprehensive EMI mitigation strategies in their robotic systems through multi-layered approaches including proper grounding techniques, cable routing optimization, and strategic placement of ferrite cores. Their robot controllers incorporate advanced filtering circuits with common-mode chokes and differential-mode capacitors to suppress conducted emissions. ABB's EMI solutions achieve compliance with IEC 61000 standards, demonstrating emission levels below 40dBμV/m at 10-meter distance for frequencies up to 1GHz. For robot skin electronics, ABB develops integrated shielding architectures that combine metallic mesh layers with the robot's structural framework, creating Faraday cage effects while maintaining tactile sensitivity. Their approach includes real-time EMI monitoring systems that can detect interference levels and automatically adjust operational parameters.
Strengths: System-level integration expertise, proven industrial robotics experience, comprehensive EMI standards compliance. Weaknesses: Focus primarily on industrial applications, limited experience with flexible skin electronics.
Core EMI Shielding Innovations for Flexible Electronics
Systems and methods for reducing electromagnetic interference in robotic devices
PatentWO2022185104A1
Innovation
- The implementation of a robotic device with a controller that controls phase-shift switching and an EMI filter comprising small split common mode chokes and capacitors, strategically positioned between the rectifier and motor axes, to reduce EMI noise and suppress leakage current, while maintaining a compact design and enhancing safety.




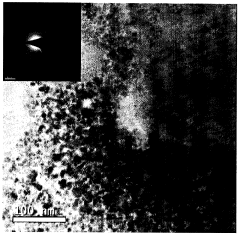
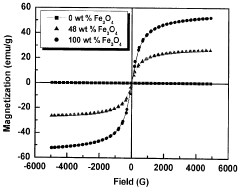
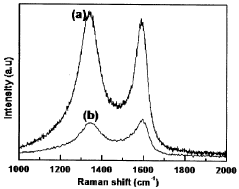
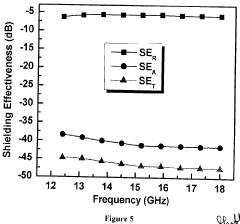
Electromagnetic interference (EMI) shielding nanocomposites with enhanced absorption based on superparamagnetic particles decorated porous carbon
PatentActiveIN2754DEL2013A
Innovation
- Superparamagnetic nanoparticles decorated porous carbon nano composites are created, combining electrical conductivity, magnetic properties, and porosity to achieve improved EMI shielding through a combination of magnetic losses and multiple reflection losses, with a method involving surfactant-capped nanoparticles and specific processing steps to achieve 10-60 weight % loading.
EMC Standards for Robotic Electronic Systems
The electromagnetic compatibility (EMC) standards for robotic electronic systems provide essential frameworks for ensuring robot skin electronics operate safely within electromagnetic environments. These standards establish mandatory requirements for electromagnetic interference (EMI) emissions and immunity levels that robotic systems must meet before market deployment.
International standards such as IEC 61000 series form the foundation for EMC compliance in robotics. The IEC 61000-6-2 standard specifically addresses immunity requirements for industrial environments, while IEC 61000-6-4 defines emission limits for industrial equipment. These standards are particularly relevant for robot skin electronics operating in manufacturing and automation environments where electromagnetic disturbances are prevalent.
Regional regulatory frameworks further refine these requirements. The European Union's EMC Directive 2014/30/EU mandates CE marking for robotic systems, requiring comprehensive EMC testing and documentation. Similarly, the Federal Communications Commission (FCC) Part 15 regulations in the United States establish specific emission limits for unintentional radiators, which include many robot skin sensor components.
Specialized standards for medical and service robots introduce additional complexity. ISO 14971 addresses risk management for medical devices, while IEC 60601-1-2 specifically covers EMC requirements for medical electrical equipment. These standards impose stricter immunity and emission requirements due to potential safety implications in healthcare environments.
Testing methodologies defined in these standards include radiated and conducted emission measurements, electrostatic discharge immunity testing, and radio frequency immunity assessments. The standards specify test setups, measurement distances, frequency ranges, and acceptable limits that robot skin electronics must satisfy during certification processes.
Compliance verification requires accredited testing laboratories and comprehensive documentation demonstrating adherence to applicable standards. This includes technical construction files, risk assessments, and declaration of conformity statements that manufacturers must maintain throughout the product lifecycle.
International standards such as IEC 61000 series form the foundation for EMC compliance in robotics. The IEC 61000-6-2 standard specifically addresses immunity requirements for industrial environments, while IEC 61000-6-4 defines emission limits for industrial equipment. These standards are particularly relevant for robot skin electronics operating in manufacturing and automation environments where electromagnetic disturbances are prevalent.
Regional regulatory frameworks further refine these requirements. The European Union's EMC Directive 2014/30/EU mandates CE marking for robotic systems, requiring comprehensive EMC testing and documentation. Similarly, the Federal Communications Commission (FCC) Part 15 regulations in the United States establish specific emission limits for unintentional radiators, which include many robot skin sensor components.
Specialized standards for medical and service robots introduce additional complexity. ISO 14971 addresses risk management for medical devices, while IEC 60601-1-2 specifically covers EMC requirements for medical electrical equipment. These standards impose stricter immunity and emission requirements due to potential safety implications in healthcare environments.
Testing methodologies defined in these standards include radiated and conducted emission measurements, electrostatic discharge immunity testing, and radio frequency immunity assessments. The standards specify test setups, measurement distances, frequency ranges, and acceptable limits that robot skin electronics must satisfy during certification processes.
Compliance verification requires accredited testing laboratories and comprehensive documentation demonstrating adherence to applicable standards. This includes technical construction files, risk assessments, and declaration of conformity statements that manufacturers must maintain throughout the product lifecycle.
Safety Considerations in Robot-Human Interaction EMI
Electromagnetic interference in robot-human interaction environments presents critical safety challenges that extend beyond mere technical performance issues. When robots equipped with electronic skin systems operate in close proximity to humans, EMI can potentially compromise essential safety mechanisms, creating hazardous situations that require comprehensive risk assessment and mitigation strategies.
The primary safety concern involves EMI-induced malfunctions in robot control systems during human interaction scenarios. Electronic skin sensors, which rely on precise signal processing for tactile feedback and proximity detection, can experience signal degradation or false readings when exposed to electromagnetic disturbances. This interference may cause robots to misinterpret human presence, contact force, or movement intentions, potentially resulting in unexpected robotic behaviors that could harm nearby individuals.
Critical safety systems such as emergency stop mechanisms, collision avoidance sensors, and force limitation controls are particularly vulnerable to EMI effects. When these protective systems fail or operate incorrectly due to electromagnetic interference, the fundamental safety barriers between robots and humans become compromised. This vulnerability is especially pronounced in collaborative robotics applications where humans and robots share workspace and interact directly.
Medical device interference represents another significant safety dimension in robot-human interaction contexts. Individuals with pacemakers, insulin pumps, or other implanted medical devices may be at risk when exposed to electromagnetic emissions from robot skin electronics. The proximity required for effective human-robot collaboration can place these vulnerable populations within the electromagnetic field influence zone, potentially causing life-threatening device malfunctions.
Environmental safety considerations include the potential for EMI to affect nearby electronic systems and infrastructure. In healthcare facilities, manufacturing environments, or smart buildings where robots operate, electromagnetic interference from robot skin systems could disrupt critical monitoring equipment, communication networks, or automated safety systems, creating cascading safety risks beyond the immediate robot-human interaction zone.
Regulatory compliance frameworks such as IEC 61000 series standards and medical device regulations establish mandatory EMI limits specifically to address these safety concerns. These standards recognize that electromagnetic compatibility is not merely a technical specification but a fundamental safety requirement for systems operating in human environments, emphasizing the critical importance of comprehensive EMI mitigation in robot skin electronics design.
The primary safety concern involves EMI-induced malfunctions in robot control systems during human interaction scenarios. Electronic skin sensors, which rely on precise signal processing for tactile feedback and proximity detection, can experience signal degradation or false readings when exposed to electromagnetic disturbances. This interference may cause robots to misinterpret human presence, contact force, or movement intentions, potentially resulting in unexpected robotic behaviors that could harm nearby individuals.
Critical safety systems such as emergency stop mechanisms, collision avoidance sensors, and force limitation controls are particularly vulnerable to EMI effects. When these protective systems fail or operate incorrectly due to electromagnetic interference, the fundamental safety barriers between robots and humans become compromised. This vulnerability is especially pronounced in collaborative robotics applications where humans and robots share workspace and interact directly.
Medical device interference represents another significant safety dimension in robot-human interaction contexts. Individuals with pacemakers, insulin pumps, or other implanted medical devices may be at risk when exposed to electromagnetic emissions from robot skin electronics. The proximity required for effective human-robot collaboration can place these vulnerable populations within the electromagnetic field influence zone, potentially causing life-threatening device malfunctions.
Environmental safety considerations include the potential for EMI to affect nearby electronic systems and infrastructure. In healthcare facilities, manufacturing environments, or smart buildings where robots operate, electromagnetic interference from robot skin systems could disrupt critical monitoring equipment, communication networks, or automated safety systems, creating cascading safety risks beyond the immediate robot-human interaction zone.
Regulatory compliance frameworks such as IEC 61000 series standards and medical device regulations establish mandatory EMI limits specifically to address these safety concerns. These standards recognize that electromagnetic compatibility is not merely a technical specification but a fundamental safety requirement for systems operating in human environments, emphasizing the critical importance of comprehensive EMI mitigation in robot skin electronics design.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!