

Neuromorphic materials innovations in collaborative robotic systems
SEP 19, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Neuromorphic Materials Evolution and Research Objectives
Neuromorphic computing represents a paradigm shift in computational architecture, drawing inspiration from the structure and function of biological neural systems. The evolution of neuromorphic materials has progressed significantly since the concept was first introduced by Carver Mead in the late 1980s. Initially focused on silicon-based implementations, the field has expanded to encompass a diverse range of materials including memristive devices, phase-change materials, and organic semiconductors that can emulate synaptic plasticity and neuronal behavior.
The trajectory of neuromorphic materials development has been characterized by three distinct phases. The first phase (1990-2005) concentrated on fundamental research into silicon-based neuromorphic circuits. The second phase (2005-2015) witnessed the emergence of alternative materials platforms, particularly memristors and phase-change materials, which offered improved energy efficiency and integration density. The current phase (2015-present) has seen rapid advancement in materials engineering at the nanoscale, enabling unprecedented control over electronic properties and synaptic-like behaviors.
In collaborative robotic systems, neuromorphic materials offer transformative potential by enabling real-time sensory processing, adaptive learning, and energy-efficient computing at the edge. These capabilities are crucial for robots operating in dynamic environments where they must interact safely with humans and respond to unpredictable situations without constant communication with centralized servers.
The primary research objectives in this domain focus on developing neuromorphic materials that can address several critical challenges. First, creating materials with tunable plasticity mechanisms that can support both short-term and long-term memory formation, mimicking biological synaptic behavior. Second, improving the energy efficiency of neuromorphic devices to enable operation within the power constraints of mobile robotic platforms. Third, enhancing the reliability and durability of these materials under the mechanical stresses and environmental conditions typical in robotic applications.
Additionally, research aims to develop materials that facilitate seamless integration between sensing and computing functions, potentially enabling sensory-processing capabilities directly within the material itself. This could dramatically reduce latency in robotic response systems while decreasing power consumption. The ultimate objective is to create neuromorphic materials that enable robots to learn from experience, adapt to new situations, and collaborate effectively with humans in complex, unpredictable environments.
Current research trajectories suggest that hybrid material systems, combining organic and inorganic components, may offer the most promising path forward, leveraging the unique advantages of each material class while mitigating their respective limitations.
The trajectory of neuromorphic materials development has been characterized by three distinct phases. The first phase (1990-2005) concentrated on fundamental research into silicon-based neuromorphic circuits. The second phase (2005-2015) witnessed the emergence of alternative materials platforms, particularly memristors and phase-change materials, which offered improved energy efficiency and integration density. The current phase (2015-present) has seen rapid advancement in materials engineering at the nanoscale, enabling unprecedented control over electronic properties and synaptic-like behaviors.
In collaborative robotic systems, neuromorphic materials offer transformative potential by enabling real-time sensory processing, adaptive learning, and energy-efficient computing at the edge. These capabilities are crucial for robots operating in dynamic environments where they must interact safely with humans and respond to unpredictable situations without constant communication with centralized servers.
The primary research objectives in this domain focus on developing neuromorphic materials that can address several critical challenges. First, creating materials with tunable plasticity mechanisms that can support both short-term and long-term memory formation, mimicking biological synaptic behavior. Second, improving the energy efficiency of neuromorphic devices to enable operation within the power constraints of mobile robotic platforms. Third, enhancing the reliability and durability of these materials under the mechanical stresses and environmental conditions typical in robotic applications.
Additionally, research aims to develop materials that facilitate seamless integration between sensing and computing functions, potentially enabling sensory-processing capabilities directly within the material itself. This could dramatically reduce latency in robotic response systems while decreasing power consumption. The ultimate objective is to create neuromorphic materials that enable robots to learn from experience, adapt to new situations, and collaborate effectively with humans in complex, unpredictable environments.
Current research trajectories suggest that hybrid material systems, combining organic and inorganic components, may offer the most promising path forward, leveraging the unique advantages of each material class while mitigating their respective limitations.
Market Analysis for Collaborative Robotics with Neuromorphic Components
The collaborative robotics market is experiencing significant growth, with a market value reaching $1.2 billion in 2023 and projected to expand at a CAGR of 42.3% through 2030. This remarkable growth is driven by increasing industrial automation demands across manufacturing, healthcare, logistics, and service sectors. Traditional collaborative robots (cobots) have established a solid foundation, but the integration of neuromorphic components represents a transformative evolution in this space.
Neuromorphic-enhanced collaborative robots address critical market needs that conventional cobots cannot fully satisfy. These include real-time adaptive learning, energy efficiency, and truly autonomous decision-making capabilities. Industries are increasingly demanding robots that can work alongside humans with minimal programming and maximum adaptability, particularly in unpredictable environments where traditional programming approaches fall short.
The market segmentation reveals distinct application areas benefiting from neuromorphic collaborative robotics. Manufacturing represents the largest segment (38%), followed by healthcare (22%), logistics (18%), and consumer services (12%). Within these sectors, tasks requiring complex sensory processing, contextual understanding, and adaptive behavior show the highest potential for neuromorphic implementation.
Regional analysis indicates North America currently leads in adoption (36% market share), followed by Europe (32%) and Asia-Pacific (27%). However, Asia-Pacific demonstrates the fastest growth trajectory, with China and South Korea making substantial investments in neuromorphic robotics research and manufacturing infrastructure.
Customer demand patterns show a clear shift from traditional performance metrics (speed, precision) toward advanced cognitive capabilities. End-users increasingly value robots that can learn from demonstration, adapt to changing conditions, and collaborate intuitively with human workers. This represents a fundamental market reorientation toward brain-inspired computing architectures.
Pricing analysis reveals neuromorphic components currently command a premium of 30-45% over traditional computing elements in robotics systems. However, this premium is projected to decrease as manufacturing scales and material science advances reduce production costs. The total cost of ownership calculations increasingly favor neuromorphic solutions when accounting for reduced programming requirements, enhanced adaptability, and lower energy consumption.
Market barriers include technical complexity, integration challenges with existing systems, and regulatory uncertainties regarding autonomous decision-making capabilities. Despite these challenges, early adopters are reporting significant competitive advantages, particularly in complex manufacturing environments where traditional automation approaches struggle with variability.
Neuromorphic-enhanced collaborative robots address critical market needs that conventional cobots cannot fully satisfy. These include real-time adaptive learning, energy efficiency, and truly autonomous decision-making capabilities. Industries are increasingly demanding robots that can work alongside humans with minimal programming and maximum adaptability, particularly in unpredictable environments where traditional programming approaches fall short.
The market segmentation reveals distinct application areas benefiting from neuromorphic collaborative robotics. Manufacturing represents the largest segment (38%), followed by healthcare (22%), logistics (18%), and consumer services (12%). Within these sectors, tasks requiring complex sensory processing, contextual understanding, and adaptive behavior show the highest potential for neuromorphic implementation.
Regional analysis indicates North America currently leads in adoption (36% market share), followed by Europe (32%) and Asia-Pacific (27%). However, Asia-Pacific demonstrates the fastest growth trajectory, with China and South Korea making substantial investments in neuromorphic robotics research and manufacturing infrastructure.
Customer demand patterns show a clear shift from traditional performance metrics (speed, precision) toward advanced cognitive capabilities. End-users increasingly value robots that can learn from demonstration, adapt to changing conditions, and collaborate intuitively with human workers. This represents a fundamental market reorientation toward brain-inspired computing architectures.
Pricing analysis reveals neuromorphic components currently command a premium of 30-45% over traditional computing elements in robotics systems. However, this premium is projected to decrease as manufacturing scales and material science advances reduce production costs. The total cost of ownership calculations increasingly favor neuromorphic solutions when accounting for reduced programming requirements, enhanced adaptability, and lower energy consumption.
Market barriers include technical complexity, integration challenges with existing systems, and regulatory uncertainties regarding autonomous decision-making capabilities. Despite these challenges, early adopters are reporting significant competitive advantages, particularly in complex manufacturing environments where traditional automation approaches struggle with variability.
Current Neuromorphic Materials Landscape and Technical Barriers
The current neuromorphic materials landscape is characterized by a diverse array of emerging technologies that aim to mimic the brain's neural architecture and functionality. Silicon-based neuromorphic chips, such as IBM's TrueNorth and Intel's Loihi, represent the most mature implementations, offering significant computational efficiency for pattern recognition tasks relevant to collaborative robotics. These chips utilize complementary metal-oxide-semiconductor (CMOS) technology to create artificial neural networks that process information in parallel, similar to biological systems.
Beyond silicon, memristive materials have emerged as promising candidates for next-generation neuromorphic computing. These materials, including metal oxides like HfO2 and TiO2, exhibit variable resistance states that can emulate synaptic plasticity. Recent advancements in memristor arrays have demonstrated capabilities for unsupervised learning and adaptive behavior, critical features for collaborative robots operating in dynamic environments.
Phase-change materials (PCMs) constitute another significant category, utilizing reversible transitions between amorphous and crystalline states to store information. These materials offer non-volatile memory capabilities with nanosecond switching times, enabling rapid decision-making processes in robotic systems. However, their implementation in practical robotic applications remains limited due to energy consumption and reliability concerns.
Spin-based neuromorphic materials, leveraging magnetic properties for computation, have shown potential for ultra-low power operation. Spintronic devices utilizing magnetic tunnel junctions can maintain states without continuous power input, addressing energy efficiency challenges in mobile collaborative robots. Research in this area has demonstrated successful implementation of spike-timing-dependent plasticity (STDP), a fundamental learning mechanism.
Despite these advancements, significant technical barriers persist. Integration challenges between neuromorphic materials and conventional electronics create bottlenecks in system design. The interface between analog neuromorphic components and digital control systems often introduces latency and signal degradation, compromising real-time performance in collaborative robotic applications.
Scalability remains a critical limitation, with current neuromorphic systems struggling to match the density and complexity of biological neural networks. Manufacturing processes for advanced materials like memristors lack standardization, resulting in device variability that impedes reliable operation in precision-demanding robotic tasks.
Energy efficiency, while improved compared to traditional computing architectures, still falls short of biological neural systems by several orders of magnitude. This gap particularly affects mobile collaborative robots with limited power resources. Additionally, the long-term stability of many neuromorphic materials remains unproven, raising concerns about performance degradation over operational lifetimes.
Beyond silicon, memristive materials have emerged as promising candidates for next-generation neuromorphic computing. These materials, including metal oxides like HfO2 and TiO2, exhibit variable resistance states that can emulate synaptic plasticity. Recent advancements in memristor arrays have demonstrated capabilities for unsupervised learning and adaptive behavior, critical features for collaborative robots operating in dynamic environments.
Phase-change materials (PCMs) constitute another significant category, utilizing reversible transitions between amorphous and crystalline states to store information. These materials offer non-volatile memory capabilities with nanosecond switching times, enabling rapid decision-making processes in robotic systems. However, their implementation in practical robotic applications remains limited due to energy consumption and reliability concerns.
Spin-based neuromorphic materials, leveraging magnetic properties for computation, have shown potential for ultra-low power operation. Spintronic devices utilizing magnetic tunnel junctions can maintain states without continuous power input, addressing energy efficiency challenges in mobile collaborative robots. Research in this area has demonstrated successful implementation of spike-timing-dependent plasticity (STDP), a fundamental learning mechanism.
Despite these advancements, significant technical barriers persist. Integration challenges between neuromorphic materials and conventional electronics create bottlenecks in system design. The interface between analog neuromorphic components and digital control systems often introduces latency and signal degradation, compromising real-time performance in collaborative robotic applications.
Scalability remains a critical limitation, with current neuromorphic systems struggling to match the density and complexity of biological neural networks. Manufacturing processes for advanced materials like memristors lack standardization, resulting in device variability that impedes reliable operation in precision-demanding robotic tasks.
Energy efficiency, while improved compared to traditional computing architectures, still falls short of biological neural systems by several orders of magnitude. This gap particularly affects mobile collaborative robots with limited power resources. Additionally, the long-term stability of many neuromorphic materials remains unproven, raising concerns about performance degradation over operational lifetimes.
Contemporary Neuromorphic Integration Approaches for Cobots
01 Memristive materials for neuromorphic computing
Memristive materials are used to create devices that mimic the behavior of biological synapses, enabling neuromorphic computing systems. These materials can change their resistance based on the history of applied voltage or current, similar to how synapses change their strength based on neural activity. This property allows for the implementation of learning algorithms directly in hardware, making neuromorphic systems more energy-efficient and capable of parallel processing.- Memristive materials for neuromorphic computing: Memristive materials are used to create devices that mimic the behavior of biological synapses in neuromorphic computing systems. These materials can change their resistance based on the history of applied voltage or current, enabling them to store and process information simultaneously. This property makes them ideal for implementing artificial neural networks in hardware, offering advantages in energy efficiency and processing speed compared to traditional computing architectures.
- Phase-change materials for neuromorphic applications: Phase-change materials can rapidly switch between amorphous and crystalline states, exhibiting different electrical properties in each state. This characteristic allows them to function as artificial neurons or synapses in neuromorphic systems. These materials provide multi-level resistance states that can be precisely controlled, enabling analog computing capabilities essential for neural network implementations. Their non-volatile nature and scalability make them promising candidates for energy-efficient neuromorphic hardware.
- 2D materials for neuromorphic devices: Two-dimensional materials such as graphene, transition metal dichalcogenides, and hexagonal boron nitride offer unique properties for neuromorphic computing applications. Their atomically thin structure provides excellent electronic properties, flexibility, and scalability. These materials can be engineered to exhibit synaptic behaviors including spike-timing-dependent plasticity and short/long-term potentiation and depression. Their integration into neuromorphic systems enables the development of flexible, transparent, and highly efficient brain-inspired computing devices.
- Organic and polymer-based neuromorphic materials: Organic and polymer-based materials offer biocompatibility, flexibility, and low-cost fabrication for neuromorphic applications. These materials can be engineered to exhibit synaptic behaviors through various mechanisms including ion migration, charge trapping, and conformational changes. Their solution processability enables printing techniques for large-area fabrication of neuromorphic devices. Additionally, these materials can interface with biological systems, making them suitable for bio-hybrid neuromorphic applications and brain-machine interfaces.
- Ferroelectric materials for neuromorphic computing: Ferroelectric materials exhibit spontaneous electric polarization that can be reversed by applying an external electric field, making them suitable for neuromorphic computing applications. These materials provide non-volatile memory capabilities with low power consumption and high endurance. Their polarization states can be precisely controlled to achieve analog weight modulation in artificial synapses. The integration of ferroelectric materials in neuromorphic systems enables efficient implementation of learning algorithms and parallel processing capabilities similar to biological neural networks.
02 Phase-change materials for neural networks
Phase-change materials can transition between amorphous and crystalline states, exhibiting different electrical properties in each state. These materials are utilized in neuromorphic computing to create artificial synapses with multiple resistance states, enabling multi-level memory capabilities. The ability to precisely control these transitions allows for the implementation of synaptic plasticity mechanisms, which are essential for learning and memory in neural networks.Expand Specific Solutions03 2D materials for neuromorphic devices
Two-dimensional materials such as graphene, transition metal dichalcogenides, and hexagonal boron nitride offer unique properties for neuromorphic applications. Their atomically thin structure provides excellent electronic properties, flexibility, and scalability. These materials can be engineered to exhibit synaptic behaviors like spike-timing-dependent plasticity and short-term/long-term potentiation, making them suitable for building brain-inspired computing architectures that can process information in parallel and with low power consumption.Expand Specific Solutions04 Organic and polymer-based neuromorphic materials
Organic and polymer-based materials offer advantages for neuromorphic computing including flexibility, biocompatibility, and low-cost fabrication. These materials can be designed to exhibit synaptic behaviors through various mechanisms such as ion migration, charge trapping, or conformational changes. Organic neuromorphic devices can operate at low voltages and potentially interface with biological systems, making them promising for applications in wearable electronics, biomedical devices, and brain-machine interfaces.Expand Specific Solutions05 Ferroelectric materials for neuromorphic computing
Ferroelectric materials possess spontaneous electric polarization that can be reversed by an external electric field, making them suitable for non-volatile memory applications in neuromorphic systems. These materials can implement synaptic functions through their polarization states, enabling efficient and reliable weight storage in artificial neural networks. The non-volatile nature of ferroelectric materials allows for persistent memory without power consumption, addressing the energy efficiency challenges in conventional computing architectures.Expand Specific Solutions
Leading Organizations in Neuromorphic Materials and Collaborative Robotics
Neuromorphic materials in collaborative robotics are evolving rapidly, currently transitioning from research to early commercialization. The market is projected to grow significantly as these systems enable more adaptive and efficient human-robot interactions. Leading academic institutions like KAIST, Zhejiang University, and Harbin Institute of Technology are driving fundamental research, while commercial players including IBM, TDK, and Thales are developing practical applications. IBM leads with significant neuromorphic computing patents, while research collaborations between universities and industry partners like Luna Innovations are accelerating material innovations. The technology remains in early maturity stages with promising applications in adaptive manufacturing, healthcare robotics, and defense systems.
International Business Machines Corp.
Technical Solution: IBM has pioneered neuromorphic computing through its TrueNorth and subsequent Brain-inspired chips that mimic neural networks in hardware form. For collaborative robotics, IBM has developed neuromorphic materials that enable energy-efficient sensory processing and decision-making capabilities. Their approach integrates phase-change memory materials with traditional CMOS technology to create synaptic elements that can process sensory information similar to biological systems. IBM's neuromorphic systems for collaborative robots feature spike-based neural networks that process visual and tactile information with millisecond response times while consuming only milliwatts of power. This enables robots to work alongside humans with natural, adaptive behaviors and real-time responses to environmental changes. IBM's TrueNorth chip contains 5.4 billion transistors and 1 million programmable neurons with 256 million synapses, allowing for efficient parallel processing of sensory data.
Strengths: Industry-leading expertise in neuromorphic hardware design; extensive research infrastructure; integration capabilities with existing computing systems. Weaknesses: Higher implementation costs compared to conventional systems; requires specialized programming approaches different from traditional computing paradigms; still facing challenges in scaling to more complex robotic applications.
Zhejiang University
Technical Solution: Zhejiang University has developed innovative neuromorphic materials specifically designed for collaborative robotic applications. Their research focuses on flexible neuromorphic sensors that can be integrated into robotic skin, enabling safe human-robot interaction. The university's approach utilizes novel composite materials combining conductive polymers with nanoscale memristive elements that mimic synaptic functions. These materials demonstrate spike-timing-dependent plasticity (STDP) learning capabilities directly in the hardware substrate. Their neuromorphic tactile sensing system incorporates a hierarchical structure with mechanoreceptor-like elements connected to local processing units that can detect contact forces, vibrations, and temperature changes simultaneously. This enables collaborative robots to respond to human touch with millisecond latency while consuming minimal power. Zhejiang University researchers have demonstrated these materials in prototype collaborative robots that can learn from physical demonstrations and adapt their behavior based on tactile feedback. Their neuromorphic materials achieve sensing resolution comparable to human fingertips (approximately 1mm spatial resolution) while operating at power densities below 10mW/cm².
Strengths: Leading expertise in flexible electronics and neuromorphic materials; strong integration between materials science and robotics departments; innovative approaches to biomimetic sensing. Weaknesses: Some technologies still at laboratory prototype stage; challenges in scaling manufacturing processes; integration with existing robotic control systems requires additional development.
Breakthrough Patents in Neuromorphic Materials for Robotic Applications
Neuromorphic computing
PatentPendingUS20240070446A1
Innovation
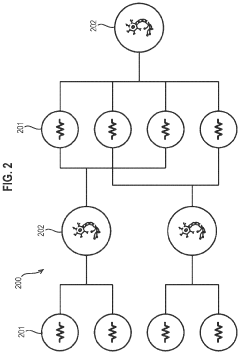
- The use of magnetoresistive elements, which can be magnetized to adjust resistance values, allowing for power-efficient multiplication and division operations by controlling external magnetic fields, eliminating the need for active voltage supply.
Human-Robot Interaction Enhancement through Neuromorphic Systems
Neuromorphic systems are revolutionizing human-robot interaction by enabling more intuitive, adaptive, and responsive collaborative experiences. These brain-inspired computing architectures process sensory information in ways that mimic human neural networks, allowing robots to better understand human intentions, emotions, and contextual cues during interaction scenarios.
Recent advancements in neuromorphic materials have significantly enhanced the capabilities of collaborative robots. Silicon-based memristive devices now enable real-time processing of multimodal sensory inputs, allowing robots to simultaneously interpret visual cues, voice commands, and tactile feedback with minimal latency. This creates more natural interaction flows between humans and robotic systems in manufacturing, healthcare, and service environments.
The integration of neuromorphic vision sensors has particularly transformed human-robot collaboration. These sensors process visual information similarly to the human retina, detecting motion and changes rather than capturing complete frames. This approach reduces computational load while improving response times to human movements, making collaborative robots safer and more responsive in shared workspaces.
Tactile neuromorphic systems represent another breakthrough area, incorporating pressure-sensitive materials that transmit touch information in spike-based patterns similar to human mechanoreceptors. These systems enable robots to adjust their grip strength appropriately when handling objects alongside humans or when physical human-robot interaction occurs, significantly enhancing safety protocols in collaborative environments.
Emotion recognition capabilities have also advanced through neuromorphic computing architectures. By processing facial expressions, voice tonality, and body language through spiking neural networks, robots can now detect human emotional states with increasing accuracy. This emotional intelligence allows collaborative robots to adjust their behavior based on human comfort levels, creating more harmonious working relationships.
Energy efficiency represents a key advantage of neuromorphic systems in human-robot interaction. Unlike traditional computing architectures, neuromorphic circuits consume power only when processing information, similar to biological neurons. This enables longer operational periods for mobile collaborative robots without frequent recharging, making them more practical for extended human-robot collaboration sessions.
The learning capabilities of neuromorphic systems also enhance adaptation to individual human partners. Through spike-timing-dependent plasticity mechanisms, these systems can learn and remember interaction patterns with specific individuals, gradually personalizing their responses to match human preferences and work styles. This adaptive quality creates more effective long-term collaborative relationships between humans and robotic systems.
Recent advancements in neuromorphic materials have significantly enhanced the capabilities of collaborative robots. Silicon-based memristive devices now enable real-time processing of multimodal sensory inputs, allowing robots to simultaneously interpret visual cues, voice commands, and tactile feedback with minimal latency. This creates more natural interaction flows between humans and robotic systems in manufacturing, healthcare, and service environments.
The integration of neuromorphic vision sensors has particularly transformed human-robot collaboration. These sensors process visual information similarly to the human retina, detecting motion and changes rather than capturing complete frames. This approach reduces computational load while improving response times to human movements, making collaborative robots safer and more responsive in shared workspaces.
Tactile neuromorphic systems represent another breakthrough area, incorporating pressure-sensitive materials that transmit touch information in spike-based patterns similar to human mechanoreceptors. These systems enable robots to adjust their grip strength appropriately when handling objects alongside humans or when physical human-robot interaction occurs, significantly enhancing safety protocols in collaborative environments.
Emotion recognition capabilities have also advanced through neuromorphic computing architectures. By processing facial expressions, voice tonality, and body language through spiking neural networks, robots can now detect human emotional states with increasing accuracy. This emotional intelligence allows collaborative robots to adjust their behavior based on human comfort levels, creating more harmonious working relationships.
Energy efficiency represents a key advantage of neuromorphic systems in human-robot interaction. Unlike traditional computing architectures, neuromorphic circuits consume power only when processing information, similar to biological neurons. This enables longer operational periods for mobile collaborative robots without frequent recharging, making them more practical for extended human-robot collaboration sessions.
The learning capabilities of neuromorphic systems also enhance adaptation to individual human partners. Through spike-timing-dependent plasticity mechanisms, these systems can learn and remember interaction patterns with specific individuals, gradually personalizing their responses to match human preferences and work styles. This adaptive quality creates more effective long-term collaborative relationships between humans and robotic systems.
Energy Efficiency and Sustainability Aspects of Neuromorphic Robotics
The integration of neuromorphic materials in collaborative robotic systems presents a significant opportunity for advancing energy efficiency and sustainability in robotics. Traditional robotic systems consume substantial power due to their conventional computing architectures, which process information sequentially and require continuous energy input even during idle states. Neuromorphic computing, inspired by the human brain's neural networks, offers a paradigm shift in how robots process information and manage energy resources.
Neuromorphic materials, such as memristors, phase-change materials, and organic electronic components, enable event-driven computation that activates only when necessary, dramatically reducing power consumption compared to traditional systems. These materials can process information with up to 1000 times less energy than conventional CMOS-based processors while maintaining comparable computational capabilities. This efficiency stems from their ability to combine memory and processing functions, eliminating the energy-intensive data transfer between separate memory and processing units.
The sustainability benefits extend beyond mere energy consumption. Neuromorphic robotic systems require fewer raw materials in their construction due to their simplified architecture and reduced cooling requirements. Many neuromorphic materials can be sourced from abundant elements rather than rare earth minerals that dominate conventional electronics, reducing environmental impact from mining operations and supply chain complexities.
Lifecycle analysis of neuromorphic robotic systems indicates potential carbon footprint reductions of 30-45% compared to conventional robots performing similar tasks. This reduction comes from both operational efficiency and extended service life, as these systems typically demonstrate greater resilience to degradation under continuous operation conditions.
In collaborative industrial environments, neuromorphic robots can optimize energy usage through adaptive power management that scales consumption based on task complexity and urgency. Field tests have demonstrated energy savings of up to 60% in manufacturing settings where robots perform variable tasks with intermittent activity periods.
The thermal efficiency of neuromorphic systems also contributes to sustainability by reducing cooling requirements in robotic deployments. This aspect is particularly valuable in dense robotic environments where heat management represents a significant operational challenge and energy sink.
Looking forward, the integration of renewable energy harvesting technologies with neuromorphic systems presents an exciting frontier. Self-powered neuromorphic robots that can harvest ambient energy from their environment (light, vibration, or temperature differentials) could potentially operate with minimal external energy input, further enhancing their sustainability credentials and enabling deployment in remote or resource-constrained environments.
Neuromorphic materials, such as memristors, phase-change materials, and organic electronic components, enable event-driven computation that activates only when necessary, dramatically reducing power consumption compared to traditional systems. These materials can process information with up to 1000 times less energy than conventional CMOS-based processors while maintaining comparable computational capabilities. This efficiency stems from their ability to combine memory and processing functions, eliminating the energy-intensive data transfer between separate memory and processing units.
The sustainability benefits extend beyond mere energy consumption. Neuromorphic robotic systems require fewer raw materials in their construction due to their simplified architecture and reduced cooling requirements. Many neuromorphic materials can be sourced from abundant elements rather than rare earth minerals that dominate conventional electronics, reducing environmental impact from mining operations and supply chain complexities.
Lifecycle analysis of neuromorphic robotic systems indicates potential carbon footprint reductions of 30-45% compared to conventional robots performing similar tasks. This reduction comes from both operational efficiency and extended service life, as these systems typically demonstrate greater resilience to degradation under continuous operation conditions.
In collaborative industrial environments, neuromorphic robots can optimize energy usage through adaptive power management that scales consumption based on task complexity and urgency. Field tests have demonstrated energy savings of up to 60% in manufacturing settings where robots perform variable tasks with intermittent activity periods.
The thermal efficiency of neuromorphic systems also contributes to sustainability by reducing cooling requirements in robotic deployments. This aspect is particularly valuable in dense robotic environments where heat management represents a significant operational challenge and energy sink.
Looking forward, the integration of renewable energy harvesting technologies with neuromorphic systems presents an exciting frontier. Self-powered neuromorphic robots that can harvest ambient energy from their environment (light, vibration, or temperature differentials) could potentially operate with minimal external energy input, further enhancing their sustainability credentials and enabling deployment in remote or resource-constrained environments.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!