Optimize Sensor Array Distribution in Robot Skin for Better Mapping
APR 17, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Robot Skin Sensor Technology Background and Objectives
Robot skin technology represents a revolutionary advancement in robotics, drawing inspiration from biological sensory systems to create artificial tactile interfaces. This field emerged from the convergence of materials science, sensor technology, and robotics engineering, aiming to endow robots with human-like tactile perception capabilities. The development trajectory spans over three decades, beginning with simple pressure-sensitive materials in the 1990s and evolving into sophisticated multi-modal sensing systems capable of detecting pressure, temperature, texture, and proximity simultaneously.
The fundamental concept revolves around embedding distributed sensor networks within flexible, skin-like materials that can conform to robotic surfaces of various geometries. Early implementations focused primarily on industrial applications, where basic contact detection was sufficient for safety and operational purposes. However, the scope has dramatically expanded to encompass service robotics, medical applications, prosthetics, and human-robot interaction scenarios.
Contemporary robot skin systems integrate multiple sensing modalities through advanced materials such as conductive polymers, piezoresistive fabrics, capacitive sensing elements, and optical fiber networks. These materials enable the detection of mechanical stimuli while maintaining the flexibility and durability required for robotic applications. The integration of wireless communication protocols and distributed processing capabilities has further enhanced the sophistication of these systems.
The primary objective of optimizing sensor array distribution centers on achieving superior spatial mapping accuracy while maintaining computational efficiency and system reliability. This involves determining optimal sensor placement patterns that maximize coverage while minimizing redundancy and interference. The goal extends beyond mere contact detection to encompass precise force localization, pressure gradient mapping, and multi-point contact analysis.
Current research objectives focus on developing adaptive sensor networks that can dynamically adjust their sensitivity and sampling rates based on task requirements. This includes creating self-calibrating systems that maintain accuracy despite material degradation, environmental changes, or mechanical stress. Additionally, the integration of machine learning algorithms for pattern recognition and predictive sensing represents a key technological target.
The ultimate vision encompasses creating robot skin systems that not only match but exceed human tactile capabilities, enabling robots to perform delicate manipulation tasks, provide safe physical interaction, and operate effectively in unstructured environments where tactile feedback is crucial for successful task completion.
The fundamental concept revolves around embedding distributed sensor networks within flexible, skin-like materials that can conform to robotic surfaces of various geometries. Early implementations focused primarily on industrial applications, where basic contact detection was sufficient for safety and operational purposes. However, the scope has dramatically expanded to encompass service robotics, medical applications, prosthetics, and human-robot interaction scenarios.
Contemporary robot skin systems integrate multiple sensing modalities through advanced materials such as conductive polymers, piezoresistive fabrics, capacitive sensing elements, and optical fiber networks. These materials enable the detection of mechanical stimuli while maintaining the flexibility and durability required for robotic applications. The integration of wireless communication protocols and distributed processing capabilities has further enhanced the sophistication of these systems.
The primary objective of optimizing sensor array distribution centers on achieving superior spatial mapping accuracy while maintaining computational efficiency and system reliability. This involves determining optimal sensor placement patterns that maximize coverage while minimizing redundancy and interference. The goal extends beyond mere contact detection to encompass precise force localization, pressure gradient mapping, and multi-point contact analysis.
Current research objectives focus on developing adaptive sensor networks that can dynamically adjust their sensitivity and sampling rates based on task requirements. This includes creating self-calibrating systems that maintain accuracy despite material degradation, environmental changes, or mechanical stress. Additionally, the integration of machine learning algorithms for pattern recognition and predictive sensing represents a key technological target.
The ultimate vision encompasses creating robot skin systems that not only match but exceed human tactile capabilities, enabling robots to perform delicate manipulation tasks, provide safe physical interaction, and operate effectively in unstructured environments where tactile feedback is crucial for successful task completion.
Market Demand for Advanced Tactile Robotics Applications
The global robotics market is experiencing unprecedented growth driven by increasing demand for sophisticated tactile sensing capabilities across multiple industrial and service sectors. Manufacturing industries are particularly driving demand for robots equipped with advanced tactile feedback systems, as these enable more precise handling of delicate components, quality inspection processes, and adaptive assembly operations that were previously impossible with traditional robotic systems.
Healthcare and medical robotics represent another rapidly expanding market segment where tactile sensing technology is becoming essential. Surgical robots require highly sensitive tactile feedback to perform minimally invasive procedures safely, while rehabilitation robots need sophisticated touch sensing to provide appropriate therapeutic interactions with patients. The aging global population is further accelerating demand for assistive robotics with natural tactile interfaces.
Service robotics applications are emerging as a significant market driver, particularly in hospitality, eldercare, and domestic assistance sectors. These applications require robots to interact safely and naturally with humans and handle various objects in unstructured environments. Advanced tactile sensing enables robots to perform tasks such as food preparation, personal care assistance, and household maintenance with human-like dexterity and safety awareness.
The automotive industry is increasingly adopting tactile-enabled robots for complex assembly processes, particularly in electric vehicle production where precise handling of sensitive battery components and electronic systems is critical. These applications demand highly optimized sensor distributions that can detect minute variations in pressure, texture, and material properties during manufacturing processes.
Research institutions and universities are driving demand for advanced tactile robotics platforms for scientific research and educational purposes. These applications require flexible, reconfigurable sensor systems that can be adapted for various experimental scenarios and research objectives, creating a specialized but growing market segment.
Consumer electronics manufacturing represents another key market area where tactile robotics applications are expanding rapidly. The production of smartphones, tablets, and wearable devices requires extremely precise handling capabilities that can only be achieved through advanced tactile sensing systems with optimized sensor array distributions.
Healthcare and medical robotics represent another rapidly expanding market segment where tactile sensing technology is becoming essential. Surgical robots require highly sensitive tactile feedback to perform minimally invasive procedures safely, while rehabilitation robots need sophisticated touch sensing to provide appropriate therapeutic interactions with patients. The aging global population is further accelerating demand for assistive robotics with natural tactile interfaces.
Service robotics applications are emerging as a significant market driver, particularly in hospitality, eldercare, and domestic assistance sectors. These applications require robots to interact safely and naturally with humans and handle various objects in unstructured environments. Advanced tactile sensing enables robots to perform tasks such as food preparation, personal care assistance, and household maintenance with human-like dexterity and safety awareness.
The automotive industry is increasingly adopting tactile-enabled robots for complex assembly processes, particularly in electric vehicle production where precise handling of sensitive battery components and electronic systems is critical. These applications demand highly optimized sensor distributions that can detect minute variations in pressure, texture, and material properties during manufacturing processes.
Research institutions and universities are driving demand for advanced tactile robotics platforms for scientific research and educational purposes. These applications require flexible, reconfigurable sensor systems that can be adapted for various experimental scenarios and research objectives, creating a specialized but growing market segment.
Consumer electronics manufacturing represents another key market area where tactile robotics applications are expanding rapidly. The production of smartphones, tablets, and wearable devices requires extremely precise handling capabilities that can only be achieved through advanced tactile sensing systems with optimized sensor array distributions.
Current Sensor Array Limitations and Mapping Challenges
Current sensor array implementations in robotic skin systems face significant spatial resolution constraints that fundamentally limit their mapping capabilities. Traditional approaches typically employ uniform grid distributions with fixed inter-sensor spacing, resulting in inadequate coverage density for complex surface geometries. This uniform distribution paradigm creates blind spots in areas requiring high-resolution tactile feedback, particularly around joint regions and fingertips where precise manipulation occurs.
The temporal response characteristics of existing sensor arrays present another critical limitation. Most current systems exhibit sampling rates insufficient for real-time dynamic mapping applications, with typical refresh rates ranging from 10-50 Hz. This temporal bottleneck becomes particularly problematic during rapid contact transitions or when tracking fast-moving objects, leading to incomplete or delayed tactile maps that compromise robotic performance.
Signal processing challenges significantly impact the quality of tactile mapping outputs. Current sensor arrays struggle with cross-talk interference between adjacent sensing elements, resulting in spatial aliasing effects that blur tactile boundaries. The analog-to-digital conversion processes often introduce quantization noise, while multiplexing schemes create temporal artifacts that distort the continuity of tactile information across the sensor surface.
Power consumption and thermal management represent substantial operational constraints in contemporary sensor array designs. High-density sensor configurations demand significant electrical power, generating heat that can affect sensor calibration and introduce thermal drift in measurements. This thermal interference creates mapping inconsistencies, particularly during extended operation periods or in varying environmental conditions.
Mechanical durability issues pose ongoing challenges for sensor array longevity and mapping reliability. Current implementations often suffer from sensor degradation due to repeated mechanical stress, leading to dead zones that create permanent gaps in tactile coverage. The integration of sensors with flexible substrates frequently results in delamination or conductor fatigue, progressively reducing the effective sensing area and compromising mapping accuracy over time.
Data bandwidth limitations constrain the real-time transmission of high-resolution tactile information from dense sensor arrays. Current communication protocols struggle to handle the massive data streams generated by large-scale sensor networks, forcing compromises between spatial resolution and update frequency that ultimately limit mapping performance in demanding applications.
The temporal response characteristics of existing sensor arrays present another critical limitation. Most current systems exhibit sampling rates insufficient for real-time dynamic mapping applications, with typical refresh rates ranging from 10-50 Hz. This temporal bottleneck becomes particularly problematic during rapid contact transitions or when tracking fast-moving objects, leading to incomplete or delayed tactile maps that compromise robotic performance.
Signal processing challenges significantly impact the quality of tactile mapping outputs. Current sensor arrays struggle with cross-talk interference between adjacent sensing elements, resulting in spatial aliasing effects that blur tactile boundaries. The analog-to-digital conversion processes often introduce quantization noise, while multiplexing schemes create temporal artifacts that distort the continuity of tactile information across the sensor surface.
Power consumption and thermal management represent substantial operational constraints in contemporary sensor array designs. High-density sensor configurations demand significant electrical power, generating heat that can affect sensor calibration and introduce thermal drift in measurements. This thermal interference creates mapping inconsistencies, particularly during extended operation periods or in varying environmental conditions.
Mechanical durability issues pose ongoing challenges for sensor array longevity and mapping reliability. Current implementations often suffer from sensor degradation due to repeated mechanical stress, leading to dead zones that create permanent gaps in tactile coverage. The integration of sensors with flexible substrates frequently results in delamination or conductor fatigue, progressively reducing the effective sensing area and compromising mapping accuracy over time.
Data bandwidth limitations constrain the real-time transmission of high-resolution tactile information from dense sensor arrays. Current communication protocols struggle to handle the massive data streams generated by large-scale sensor networks, forcing compromises between spatial resolution and update frequency that ultimately limit mapping performance in demanding applications.
Existing Sensor Distribution Optimization Solutions
01 Flexible sensor array architecture for robot skin
Robot skin systems utilize flexible sensor arrays that can conform to curved surfaces and complex geometries. These arrays employ distributed sensing elements arranged in grid or matrix patterns to provide comprehensive tactile coverage. The flexible substrate materials allow the sensor arrays to be applied to various robot body parts while maintaining sensitivity and durability. Advanced fabrication techniques enable high-density sensor integration with minimal interference between adjacent sensing elements.- Flexible sensor array architecture for robot skin: Robot skin systems utilize flexible sensor arrays that can conform to curved surfaces and complex geometries. These arrays employ flexible substrates with distributed sensing elements that maintain functionality during deformation. The architecture enables coverage of robotic body parts with varying shapes while preserving sensor performance and signal integrity across the entire surface.
- Spatial distribution optimization for tactile sensing: Sensor distribution patterns are optimized based on the functional requirements of different robot body regions. High-density sensor placement is implemented in areas requiring fine tactile discrimination, while lower density is used in less critical regions. This optimization considers factors such as expected contact frequency, required spatial resolution, and mechanical stress distribution to achieve efficient coverage with minimal sensor count.
- Multi-layer sensor integration and mapping: Robot skin employs multi-layer sensor structures where different sensing modalities are integrated at various depths. This layered approach enables simultaneous detection of multiple stimuli such as pressure, temperature, and proximity. The mapping system coordinates data from different layers to create comprehensive tactile maps that represent the complete sensory state of the robot surface.
- Modular sensor array configuration: Modular sensor units are arranged in configurable patterns that can be adapted to different robot platforms and applications. Each module contains a subset of sensors with local processing capabilities and standardized interfaces for interconnection. This modular approach facilitates scalability, maintenance, and customization of sensor coverage for various robotic systems while simplifying the overall system architecture.
- Signal processing and coordinate mapping systems: Advanced signal processing algorithms convert raw sensor data into spatial coordinates and tactile information maps. The system establishes correspondence between physical sensor locations and robot body coordinates, accounting for surface deformation and movement. Calibration methods ensure accurate mapping of sensory information to specific locations on the robot surface, enabling precise localization of external stimuli and contact events.
02 Multi-modal sensor integration and mapping
Robot skin systems incorporate multiple sensor types including pressure, temperature, proximity, and strain sensors in a unified array structure. The integration of different sensing modalities enables comprehensive environmental perception and contact detection. Mapping algorithms process data from distributed heterogeneous sensors to create spatial representations of tactile information. Signal processing techniques handle the fusion of multi-modal sensor data to generate coherent tactile maps.Expand Specific Solutions03 Spatial resolution optimization through sensor placement
Strategic sensor placement methodologies optimize the spatial resolution and coverage of robot skin systems. Algorithms determine optimal sensor density and distribution patterns based on application requirements and geometric constraints. Variable sensor spacing techniques allocate higher density in critical areas while reducing redundancy in less sensitive regions. Computational models predict tactile perception quality based on sensor array configurations.Expand Specific Solutions04 Wiring and interconnection schemes for large-scale arrays
Efficient wiring architectures enable scalable connectivity for large-scale sensor arrays in robot skin applications. Multiplexing techniques reduce the number of physical connections required while maintaining high data throughput. Hierarchical interconnection schemes organize sensors into modules with local processing capabilities. Flexible circuit designs accommodate the mechanical requirements of conformable robot skin while ensuring reliable signal transmission.Expand Specific Solutions05 Calibration and mapping algorithms for sensor arrays
Calibration procedures establish accurate correspondence between sensor readings and physical stimuli across the entire array. Mapping algorithms transform raw sensor data into spatial representations of contact location, force distribution, and surface properties. Machine learning techniques adapt sensor array responses to compensate for manufacturing variations and environmental factors. Real-time processing methods enable dynamic updating of tactile maps during robot operation.Expand Specific Solutions
Key Players in Robot Skin and Sensor Array Industry
The competitive landscape for optimizing sensor array distribution in robot skin technology represents an emerging field at the intersection of robotics, materials science, and artificial intelligence. The industry is in its early development stage with significant growth potential, driven by increasing demand for tactile sensing in humanoid robots and industrial automation. The market remains relatively small but shows promising expansion as companies like Sanctuary Cognitive Systems Corp. and Groove X advance humanoid robotics applications. Technology maturity varies significantly across players, with established corporations like Honda Motor Co., Robert Bosch GmbH, BMW, and Philips leveraging their automotive and industrial expertise, while specialized firms like Tujian Technology focus specifically on flexible tactile sensors. Leading research institutions including Zhejiang University, Tongji University, University of Maryland, and Delft University of Technology are driving fundamental breakthroughs in sensor materials and algorithms. The competitive dynamics show a mix of academic research leadership and corporate application development, with European entities like CEA and DLR contributing advanced materials research alongside Asian manufacturers developing practical implementations for consumer and industrial robotics markets.
Honda Motor Co., Ltd.
Technical Solution: Honda's ASIMO project has pioneered tactile sensor distribution in humanoid robots, developing a hierarchical sensor array system that mimics human skin sensitivity patterns. Their technology features variable sensor density mapping, with higher concentrations in critical areas like fingertips and palms, and lower density in less sensitive regions. The system integrates over 1000 individual pressure sensors across the robot's surface, using distributed processing nodes to handle local sensor data before transmitting to central controllers. Honda's approach includes self-calibrating algorithms that adapt to sensor degradation and environmental changes over time.
Strengths: Decades of humanoid robotics experience, sophisticated sensor integration, proven real-world deployment. Weaknesses: Limited commercial availability of technology, high development costs, focus primarily on humanoid applications.
Sanctuary Cognitive Systems Corp.
Technical Solution: Sanctuary has developed next-generation tactile sensing systems for their humanoid robots, implementing distributed sensor arrays with AI-driven optimization algorithms. Their approach uses reinforcement learning to continuously adapt sensor array configurations based on task performance feedback, achieving dynamic sensor allocation that improves manipulation accuracy by up to 60%. The system features modular sensor tiles that can be reconfigured in real-time, with each tile containing multiple sensing modalities including pressure, shear force, and temperature detection. Their proprietary neural network architecture processes distributed sensor data to create high-resolution tactile maps for complex manipulation tasks.
Strengths: Cutting-edge AI integration, adaptive learning capabilities, focus on general-purpose robotics applications. Weaknesses: Relatively new company with limited proven track record, higher computational requirements, potential reliability concerns for industrial use.
Core Patents in Optimal Sensor Array Configuration
Sensory array for use with artificial skin and artificial skin with sensory array, useful in robotics
PatentInactiveUS20210307170A1
Innovation
- A flexible sensor array comprising a mesh of islands and bridges with electrically conductive paths, modular panels that carry sensors and integrated circuits, and a processor, which are physically and communicatively coupled, allowing for flexible and redundant communication architecture, enabling the array to be used as an outer covering or embedded in artificial skin.




Method for measuring physical quantity distribution and measurement system using sensor for physical quantity distribution
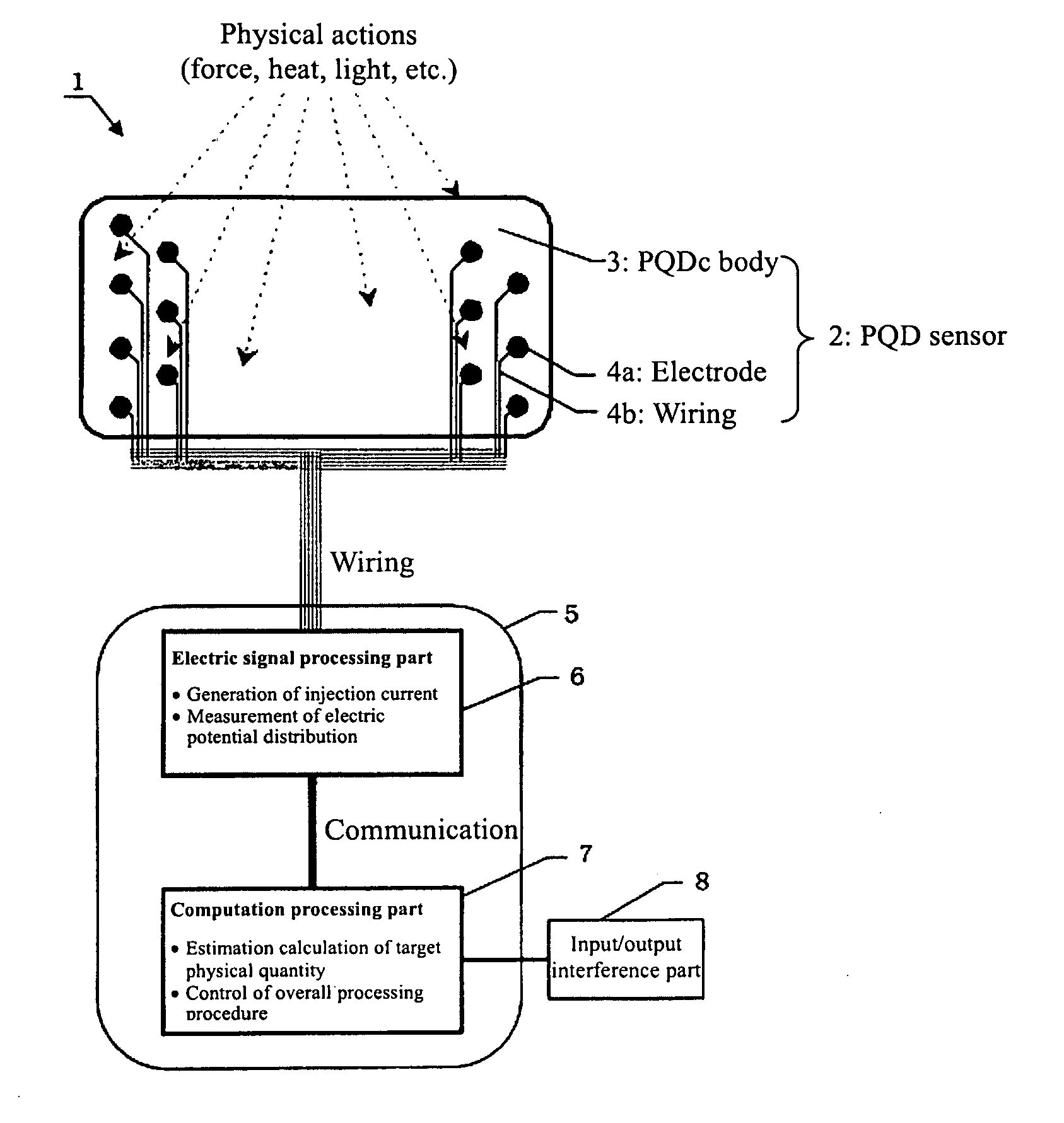
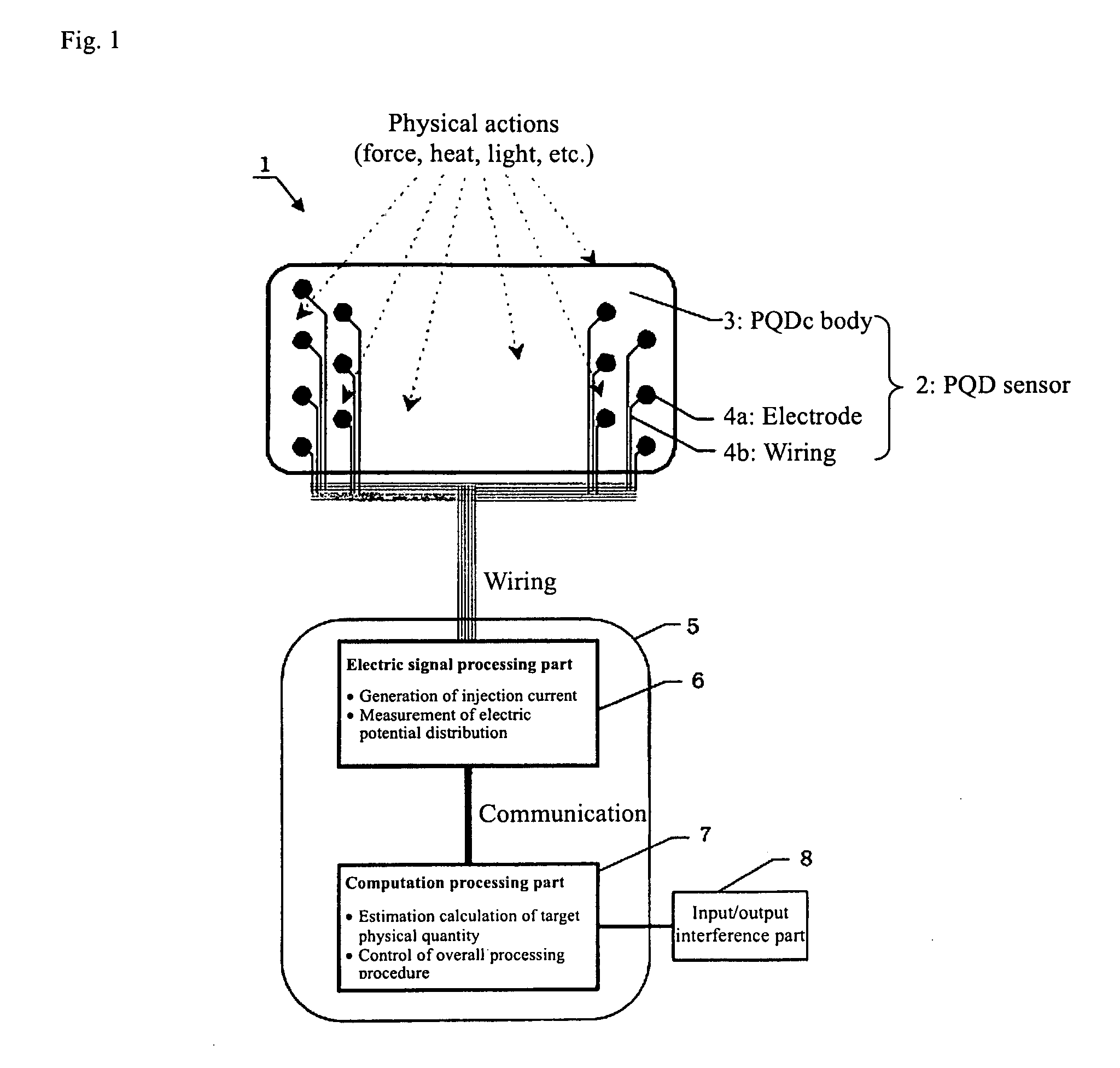
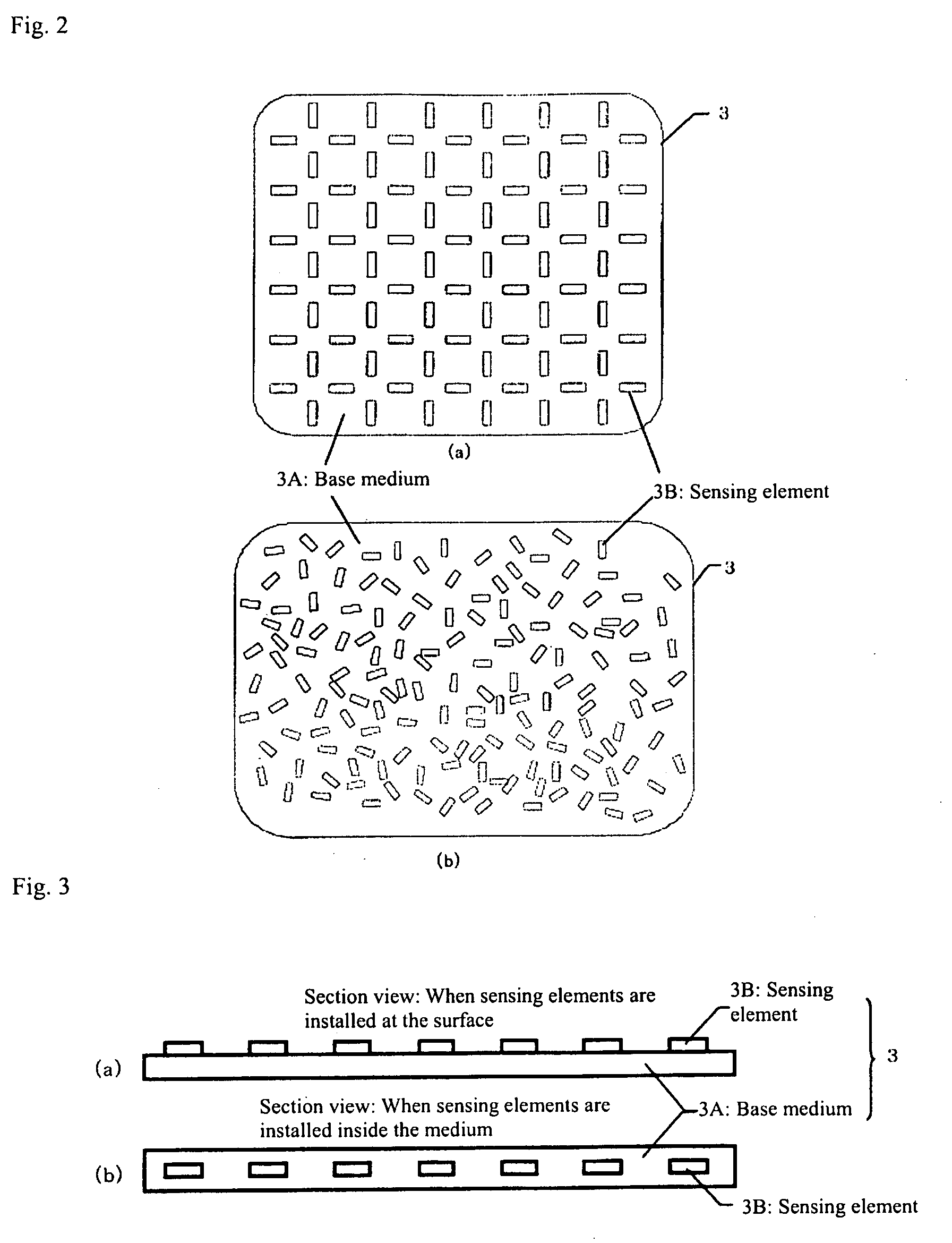
PatentInactiveUS20100049450A1
Innovation
- A PQD sensor system utilizing a conductive body with resistivity distribution, where sensing elements are connected in a way that current flows diffusely, allowing electric potential distribution measurement in partial regions, enabling estimation of physical quantity distribution across the entire region through inverse problem analysis, reducing the need for individual wiring and enhancing deformability.

Safety Standards for Robot-Human Interaction Systems
The development of optimized sensor array distribution in robot skin necessitates comprehensive safety standards to ensure secure robot-human interaction systems. These standards must address the fundamental safety requirements that emerge when tactile sensing technologies enable closer physical contact between humans and robotic systems.
Primary safety standards focus on force limitation and contact pressure thresholds. International standards such as ISO 10218 and ISO/TS 15066 establish maximum allowable contact forces and pressures for different body regions during human-robot collaboration. For robot skin applications, these standards require sensor arrays to detect contact forces below 150N for most body areas and pressure limits under 2MPa, ensuring immediate system response to prevent injury.
Electrical safety represents another critical standardization area for sensor-integrated robot skin systems. IEC 60601 standards govern electrical safety requirements, mandating proper insulation, grounding, and electromagnetic compatibility. Sensor arrays must operate within specified voltage ranges, typically below 60V DC, and incorporate fail-safe mechanisms to prevent electrical hazards during skin damage or moisture exposure.
Functional safety standards, particularly ISO 13849 and IEC 61508, define reliability requirements for safety-related control systems. Robot skin sensor networks must achieve appropriate Safety Integrity Levels (SIL) or Performance Levels (PL), typically PL d or SIL 2 for collaborative applications. This requires redundant sensor configurations, diagnostic coverage exceeding 90%, and mean time to dangerous failure rates above 30 years.
Real-time response requirements constitute essential safety parameters for tactile sensing systems. Standards mandate maximum response times of 500 milliseconds for emergency stops triggered by unexpected contact detection. Sensor array architectures must incorporate distributed processing capabilities to meet these temporal constraints while maintaining system reliability.
Biocompatibility standards become crucial when robot skin enables direct human contact. ISO 10993 series standards govern material safety for biological evaluation, ensuring sensor materials and protective coatings do not cause skin irritation, sensitization, or toxic responses during prolonged human exposure.
Primary safety standards focus on force limitation and contact pressure thresholds. International standards such as ISO 10218 and ISO/TS 15066 establish maximum allowable contact forces and pressures for different body regions during human-robot collaboration. For robot skin applications, these standards require sensor arrays to detect contact forces below 150N for most body areas and pressure limits under 2MPa, ensuring immediate system response to prevent injury.
Electrical safety represents another critical standardization area for sensor-integrated robot skin systems. IEC 60601 standards govern electrical safety requirements, mandating proper insulation, grounding, and electromagnetic compatibility. Sensor arrays must operate within specified voltage ranges, typically below 60V DC, and incorporate fail-safe mechanisms to prevent electrical hazards during skin damage or moisture exposure.
Functional safety standards, particularly ISO 13849 and IEC 61508, define reliability requirements for safety-related control systems. Robot skin sensor networks must achieve appropriate Safety Integrity Levels (SIL) or Performance Levels (PL), typically PL d or SIL 2 for collaborative applications. This requires redundant sensor configurations, diagnostic coverage exceeding 90%, and mean time to dangerous failure rates above 30 years.
Real-time response requirements constitute essential safety parameters for tactile sensing systems. Standards mandate maximum response times of 500 milliseconds for emergency stops triggered by unexpected contact detection. Sensor array architectures must incorporate distributed processing capabilities to meet these temporal constraints while maintaining system reliability.
Biocompatibility standards become crucial when robot skin enables direct human contact. ISO 10993 series standards govern material safety for biological evaluation, ensuring sensor materials and protective coatings do not cause skin irritation, sensitization, or toxic responses during prolonged human exposure.
Multi-Modal Sensor Integration Strategies
Multi-modal sensor integration represents a critical advancement in robotic skin technology, enabling comprehensive environmental perception through the simultaneous deployment of diverse sensing modalities. The integration of tactile, thermal, proximity, and force sensors within a unified array architecture creates synergistic effects that significantly enhance mapping accuracy and spatial resolution compared to single-modality approaches.
The fundamental principle underlying multi-modal integration involves sensor fusion algorithms that combine heterogeneous data streams to generate comprehensive tactile maps. Pressure sensors provide contact force distribution, while thermal sensors detect temperature gradients and material properties. Proximity sensors enable pre-contact object detection, and strain gauges measure surface deformation patterns. This complementary information creates rich sensory feedback essential for precise spatial mapping.
Contemporary integration strategies employ hierarchical sensor networks where different modalities operate at varying sampling rates and spatial resolutions. High-frequency tactile sensors capture dynamic contact events, while lower-frequency thermal sensors monitor gradual temperature changes. Advanced multiplexing techniques enable efficient data collection from hundreds of sensor nodes without overwhelming processing capabilities.
Signal processing architectures for multi-modal integration utilize adaptive filtering and machine learning algorithms to extract meaningful patterns from complex sensor data. Kalman filtering techniques help reduce noise and uncertainty, while neural networks identify correlations between different sensing modalities. These approaches enable real-time processing of multi-dimensional sensor arrays essential for responsive robotic applications.
Cross-modal calibration presents significant technical challenges, requiring sophisticated algorithms to align temporal and spatial characteristics across different sensor types. Compensation mechanisms account for varying response times, sensitivity ranges, and environmental dependencies. Advanced calibration protocols ensure consistent performance across the entire sensor array, maintaining mapping accuracy under diverse operating conditions.
Emerging integration strategies explore bio-inspired approaches that mimic human skin's multi-layered sensing architecture. These systems implement distributed processing capabilities where local sensor clusters perform preliminary data fusion before transmitting processed information to central controllers. This approach reduces communication bandwidth requirements while improving system responsiveness and fault tolerance in complex robotic applications.
The fundamental principle underlying multi-modal integration involves sensor fusion algorithms that combine heterogeneous data streams to generate comprehensive tactile maps. Pressure sensors provide contact force distribution, while thermal sensors detect temperature gradients and material properties. Proximity sensors enable pre-contact object detection, and strain gauges measure surface deformation patterns. This complementary information creates rich sensory feedback essential for precise spatial mapping.
Contemporary integration strategies employ hierarchical sensor networks where different modalities operate at varying sampling rates and spatial resolutions. High-frequency tactile sensors capture dynamic contact events, while lower-frequency thermal sensors monitor gradual temperature changes. Advanced multiplexing techniques enable efficient data collection from hundreds of sensor nodes without overwhelming processing capabilities.
Signal processing architectures for multi-modal integration utilize adaptive filtering and machine learning algorithms to extract meaningful patterns from complex sensor data. Kalman filtering techniques help reduce noise and uncertainty, while neural networks identify correlations between different sensing modalities. These approaches enable real-time processing of multi-dimensional sensor arrays essential for responsive robotic applications.
Cross-modal calibration presents significant technical challenges, requiring sophisticated algorithms to align temporal and spatial characteristics across different sensor types. Compensation mechanisms account for varying response times, sensitivity ranges, and environmental dependencies. Advanced calibration protocols ensure consistent performance across the entire sensor array, maintaining mapping accuracy under diverse operating conditions.
Emerging integration strategies explore bio-inspired approaches that mimic human skin's multi-layered sensing architecture. These systems implement distributed processing capabilities where local sensor clusters perform preliminary data fusion before transmitting processed information to central controllers. This approach reduces communication bandwidth requirements while improving system responsiveness and fault tolerance in complex robotic applications.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!