

Patented Technologies in Soft Pneumatic System Designs
OCT 8, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Soft Pneumatic Systems Background and Objectives
Soft pneumatic systems represent a significant advancement in the field of robotics and mechanical engineering, emerging from the convergence of materials science, fluid dynamics, and biomimetic design principles. These systems utilize compliant materials and pneumatic actuation to create flexible, adaptable structures that can perform complex movements and interactions with their environment. The evolution of soft pneumatic technologies can be traced back to the early 2000s, when researchers began exploring alternatives to rigid robotic systems, drawing inspiration from biological organisms such as octopuses, elephant trunks, and human muscles.
The technological trajectory of soft pneumatic systems has been characterized by progressive improvements in materials, fabrication techniques, and control methodologies. Early designs relied on simple elastomeric chambers that expanded when pressurized, while contemporary systems incorporate sophisticated multi-chamber architectures, variable stiffness mechanisms, and integrated sensing capabilities. This evolution reflects a broader trend toward more biomimetic approaches in engineering, seeking to replicate the efficiency, adaptability, and safety inherent in biological systems.
Patent activity in this domain has accelerated significantly over the past decade, with innovations focusing on novel actuator geometries, multi-material fabrication processes, and integrated control systems. Key technological milestones include the development of fiber-reinforced actuators, which enable directional bending and extension movements, and the introduction of programmable stiffness mechanisms that allow soft structures to transition between compliant and rigid states.
The primary objectives of current research and development in soft pneumatic systems encompass several dimensions. From a performance perspective, researchers aim to enhance the force-to-weight ratio, speed of actuation, and range of motion achievable with soft pneumatic actuators. Durability represents another critical objective, with efforts directed toward increasing the operational lifespan of these systems through improved materials and stress distribution strategies.
Integration capabilities constitute a third major objective, focusing on the seamless incorporation of sensing, control, and actuation functions within unified soft robotic platforms. This includes the development of soft sensors that can detect deformation, pressure, and contact without compromising the inherent compliance of the system. Finally, manufacturability objectives address the need for scalable, cost-effective production methods that can transition soft pneumatic technologies from laboratory prototypes to commercial applications.
The convergence of these technological trends and objectives is driving the field toward increasingly sophisticated soft pneumatic systems capable of addressing complex challenges in healthcare, manufacturing, exploration, and human-robot interaction domains.
The technological trajectory of soft pneumatic systems has been characterized by progressive improvements in materials, fabrication techniques, and control methodologies. Early designs relied on simple elastomeric chambers that expanded when pressurized, while contemporary systems incorporate sophisticated multi-chamber architectures, variable stiffness mechanisms, and integrated sensing capabilities. This evolution reflects a broader trend toward more biomimetic approaches in engineering, seeking to replicate the efficiency, adaptability, and safety inherent in biological systems.
Patent activity in this domain has accelerated significantly over the past decade, with innovations focusing on novel actuator geometries, multi-material fabrication processes, and integrated control systems. Key technological milestones include the development of fiber-reinforced actuators, which enable directional bending and extension movements, and the introduction of programmable stiffness mechanisms that allow soft structures to transition between compliant and rigid states.
The primary objectives of current research and development in soft pneumatic systems encompass several dimensions. From a performance perspective, researchers aim to enhance the force-to-weight ratio, speed of actuation, and range of motion achievable with soft pneumatic actuators. Durability represents another critical objective, with efforts directed toward increasing the operational lifespan of these systems through improved materials and stress distribution strategies.
Integration capabilities constitute a third major objective, focusing on the seamless incorporation of sensing, control, and actuation functions within unified soft robotic platforms. This includes the development of soft sensors that can detect deformation, pressure, and contact without compromising the inherent compliance of the system. Finally, manufacturability objectives address the need for scalable, cost-effective production methods that can transition soft pneumatic technologies from laboratory prototypes to commercial applications.
The convergence of these technological trends and objectives is driving the field toward increasingly sophisticated soft pneumatic systems capable of addressing complex challenges in healthcare, manufacturing, exploration, and human-robot interaction domains.
Market Applications and Demand Analysis
The soft pneumatic systems market has experienced significant growth in recent years, driven by increasing demand across multiple sectors. The global market for soft robotics, which heavily incorporates soft pneumatic technologies, was valued at approximately $645 million in 2020 and is projected to reach $2.1 billion by 2027, representing a compound annual growth rate of 18.5%. This remarkable growth trajectory underscores the expanding applications and market acceptance of soft pneumatic systems.
Healthcare and medical applications represent the largest market segment for soft pneumatic technologies. The demand is particularly strong for rehabilitation devices, surgical tools, and assistive wearables. The aging population in developed countries has created substantial need for rehabilitation robots and exoskeletons that utilize soft pneumatic actuators, offering safer human-machine interactions compared to traditional rigid systems. Medical professionals increasingly prefer soft pneumatic surgical tools for minimally invasive procedures due to their inherent compliance and adaptability.
The manufacturing sector constitutes another significant market for soft pneumatic systems. As collaborative robots become more prevalent in industrial settings, the demand for soft grippers and manipulators capable of handling delicate or irregularly shaped objects continues to rise. These systems offer advantages in food processing, electronics assembly, and packaging industries where traditional rigid grippers may damage products or prove inefficient.
Consumer robotics represents an emerging market with substantial growth potential. Soft pneumatic technologies are being incorporated into educational robots, entertainment devices, and household assistive robots. The intuitive and safe interaction capabilities of soft pneumatic systems make them particularly suitable for consumer applications where human contact is frequent and safety concerns are paramount.
Environmental monitoring and exploration sectors are also driving demand for soft pneumatic systems. Their ability to operate in challenging environments, including underwater and hazardous conditions, makes them valuable for applications ranging from deep-sea exploration to disaster response. The adaptability of soft pneumatic designs to irregular terrains and confined spaces provides significant advantages over conventional rigid robotic systems.
Regional analysis indicates that North America currently leads the market for soft pneumatic technologies, followed by Europe and Asia-Pacific. However, the Asia-Pacific region is expected to witness the highest growth rate in the coming years, driven by increasing industrial automation, healthcare expenditure, and research investments in countries like China, Japan, and South Korea.
Healthcare and medical applications represent the largest market segment for soft pneumatic technologies. The demand is particularly strong for rehabilitation devices, surgical tools, and assistive wearables. The aging population in developed countries has created substantial need for rehabilitation robots and exoskeletons that utilize soft pneumatic actuators, offering safer human-machine interactions compared to traditional rigid systems. Medical professionals increasingly prefer soft pneumatic surgical tools for minimally invasive procedures due to their inherent compliance and adaptability.
The manufacturing sector constitutes another significant market for soft pneumatic systems. As collaborative robots become more prevalent in industrial settings, the demand for soft grippers and manipulators capable of handling delicate or irregularly shaped objects continues to rise. These systems offer advantages in food processing, electronics assembly, and packaging industries where traditional rigid grippers may damage products or prove inefficient.
Consumer robotics represents an emerging market with substantial growth potential. Soft pneumatic technologies are being incorporated into educational robots, entertainment devices, and household assistive robots. The intuitive and safe interaction capabilities of soft pneumatic systems make them particularly suitable for consumer applications where human contact is frequent and safety concerns are paramount.
Environmental monitoring and exploration sectors are also driving demand for soft pneumatic systems. Their ability to operate in challenging environments, including underwater and hazardous conditions, makes them valuable for applications ranging from deep-sea exploration to disaster response. The adaptability of soft pneumatic designs to irregular terrains and confined spaces provides significant advantages over conventional rigid robotic systems.
Regional analysis indicates that North America currently leads the market for soft pneumatic technologies, followed by Europe and Asia-Pacific. However, the Asia-Pacific region is expected to witness the highest growth rate in the coming years, driven by increasing industrial automation, healthcare expenditure, and research investments in countries like China, Japan, and South Korea.
Current Technological Landscape and Challenges
Soft pneumatic systems have witnessed significant technological advancements in recent years, with global research institutions and companies actively pursuing innovations in this field. Currently, the technology landscape is characterized by a diverse range of patented solutions addressing flexibility, control precision, and material limitations. The United States, Japan, and Germany lead in patent filings, with China rapidly increasing its intellectual property portfolio in this domain.
The current state of soft pneumatic system design technology demonstrates remarkable progress in actuator configurations, with notable patents focusing on multi-chamber designs that enable complex movements and improved force distribution. Harvard University's patents on fiber-reinforced soft actuators represent a significant breakthrough, allowing for controlled deformation patterns while maintaining structural integrity under pressure.
Despite these advancements, several technical challenges persist. Material limitations remain a primary constraint, as most commercially available elastomers exhibit hysteresis and viscoelastic behaviors that reduce predictability and precision in pneumatic control systems. Patents addressing this issue, such as those from Soft Robotics Inc., propose composite materials with specialized coatings to enhance durability while maintaining compliance.
Control precision presents another significant challenge. Traditional pneumatic control systems struggle with the non-linear behavior inherent to soft materials. Recent patents from companies like Festo and universities including MIT propose novel valve designs and pressure regulation mechanisms specifically tailored for soft systems, though complete solutions remain elusive.
Scalability issues constitute a third major challenge. Current manufacturing techniques for soft pneumatic systems often involve labor-intensive molding processes that limit mass production capabilities. While patents from companies like OtherLab present innovative fabrication methods using advanced lamination techniques, these approaches still face integration challenges with existing manufacturing infrastructure.
Energy efficiency represents a persistent obstacle, with most systems requiring continuous pressure maintenance that results in significant air consumption. Patents addressing this concern, particularly those from Japanese companies like SMC and Bridgestone, propose bistable mechanisms and novel sealing technologies, though comprehensive solutions remain under development.
Standardization across the industry presents another challenge, as the lack of unified design principles and testing methodologies hinders widespread adoption. Geographic distribution of technology development shows concentration in academic centers in North America and industrial hubs in East Asia and Europe, with limited cross-regional collaboration despite the global nature of supply chains in this sector.
The current state of soft pneumatic system design technology demonstrates remarkable progress in actuator configurations, with notable patents focusing on multi-chamber designs that enable complex movements and improved force distribution. Harvard University's patents on fiber-reinforced soft actuators represent a significant breakthrough, allowing for controlled deformation patterns while maintaining structural integrity under pressure.
Despite these advancements, several technical challenges persist. Material limitations remain a primary constraint, as most commercially available elastomers exhibit hysteresis and viscoelastic behaviors that reduce predictability and precision in pneumatic control systems. Patents addressing this issue, such as those from Soft Robotics Inc., propose composite materials with specialized coatings to enhance durability while maintaining compliance.
Control precision presents another significant challenge. Traditional pneumatic control systems struggle with the non-linear behavior inherent to soft materials. Recent patents from companies like Festo and universities including MIT propose novel valve designs and pressure regulation mechanisms specifically tailored for soft systems, though complete solutions remain elusive.
Scalability issues constitute a third major challenge. Current manufacturing techniques for soft pneumatic systems often involve labor-intensive molding processes that limit mass production capabilities. While patents from companies like OtherLab present innovative fabrication methods using advanced lamination techniques, these approaches still face integration challenges with existing manufacturing infrastructure.
Energy efficiency represents a persistent obstacle, with most systems requiring continuous pressure maintenance that results in significant air consumption. Patents addressing this concern, particularly those from Japanese companies like SMC and Bridgestone, propose bistable mechanisms and novel sealing technologies, though comprehensive solutions remain under development.
Standardization across the industry presents another challenge, as the lack of unified design principles and testing methodologies hinders widespread adoption. Geographic distribution of technology development shows concentration in academic centers in North America and industrial hubs in East Asia and Europe, with limited cross-regional collaboration despite the global nature of supply chains in this sector.
Existing Patented Design Solutions
01 Soft pneumatic actuators and grippers
Soft pneumatic actuators and grippers are designed with flexible materials that can deform and adapt to various shapes when pressurized with air. These systems provide gentle grasping capabilities for handling delicate objects while maintaining sufficient strength. The flexible nature of these actuators allows for safe human-robot interaction and operation in unstructured environments. These systems typically use elastomeric materials that inflate in controlled patterns to create bending, twisting, or gripping motions.- Soft robotic actuators and grippers: Soft pneumatic systems are used in robotic applications to create flexible actuators and grippers that can safely interact with delicate objects. These systems typically use elastomeric materials that deform when pressurized with air, allowing for gentle manipulation capabilities. The soft nature of these actuators provides advantages in handling irregular objects and working alongside humans without risk of injury.
- Wearable pneumatic devices for medical applications: Pneumatic systems are being developed for wearable medical devices that can assist with rehabilitation, provide therapeutic compression, or enhance mobility. These systems use soft, conformable materials that adapt to body contours while delivering controlled pressure. Applications include exoskeletons, compression garments for circulation improvement, and assistive devices for patients with mobility limitations.
- Control systems for soft pneumatics: Advanced control mechanisms are essential for precise operation of soft pneumatic systems. These include pressure regulation systems, valve arrays, and feedback control algorithms that enable accurate positioning and force control. Some innovations focus on miniaturized control components that can be integrated directly into soft structures, while others develop distributed control architectures for complex pneumatic networks.
- Manufacturing techniques for soft pneumatic structures: Novel manufacturing methods are being developed to create complex soft pneumatic systems with integrated channels, chambers, and functional elements. These include molding techniques, 3D printing of flexible materials, and hybrid fabrication approaches that combine rigid and soft components. Some innovations focus on scalable production methods for commercial applications, while others explore customizable designs for specific use cases.
- Energy-efficient pneumatic actuation systems: Innovations in energy efficiency for pneumatic systems focus on reducing air consumption while maintaining performance. These include improved valve designs, pressure recovery systems, and optimized actuation sequences. Some approaches use variable stiffness materials that can maintain position with minimal energy input, while others implement smart control algorithms that minimize compressed air usage during operation.
02 Wearable soft pneumatic devices for rehabilitation
Wearable soft pneumatic systems are designed for rehabilitation and assistive purposes. These devices use inflatable chambers that conform to body parts and provide controlled force for physical therapy or mobility assistance. The pneumatic components can be integrated into gloves, sleeves, or exoskeletons to assist with movement or provide therapeutic compression. These systems offer advantages of lightweight design, customizable pressure distribution, and comfortable interface with the human body.Expand Specific Solutions03 Control systems for soft pneumatics
Control systems for soft pneumatics involve specialized valves, pressure regulators, and feedback mechanisms to precisely manage air flow and pressure within soft structures. These control architectures enable complex movements and force modulation in soft robotic applications. Advanced systems incorporate sensors to detect environmental interactions and adjust pneumatic response accordingly. The control strategies often address the nonlinear behavior of soft materials under pneumatic actuation to achieve predictable and repeatable performance.Expand Specific Solutions04 Manufacturing methods for soft pneumatic systems
Manufacturing techniques for soft pneumatic systems include molding, 3D printing, and lamination processes to create complex pneumatic chambers and channels within elastomeric materials. These fabrication methods enable customized designs with varying wall thicknesses and internal structures to achieve specific deformation patterns when pressurized. Multi-material manufacturing approaches allow integration of rigid components with soft pneumatic elements to create hybrid systems with enhanced functionality. Advanced techniques incorporate embedded sensors or conductive materials during the fabrication process.Expand Specific Solutions05 Medical applications of soft pneumatic systems
Soft pneumatic systems are increasingly used in medical applications including minimally invasive surgery, diagnostic tools, and therapeutic devices. These systems leverage the inherent safety of compliant pneumatic actuators when interacting with human tissues. Medical soft pneumatics can navigate through complex anatomical structures while minimizing trauma. Applications include steerable catheters, artificial muscles for organ assistance, and tactile feedback systems for surgical instruments. The biocompatible materials used in these systems make them suitable for direct patient contact.Expand Specific Solutions
Leading Companies and Research Institutions
The soft pneumatic systems market is in a growth phase, characterized by increasing adoption across medical, industrial, and robotics sectors. The market is projected to expand significantly due to advancements in materials science and control systems. Technologically, the field shows varying maturity levels, with established players like Festo SE & Co. KG and Caterpillar leading industrial applications, while academic institutions such as Harvard College and University of Michigan drive innovation through fundamental research. Medical applications are being pioneered by companies like Medos International and Hill-Rom Services. Boeing and NIKE represent cross-industry adoption, leveraging soft pneumatics for aerospace and consumer applications respectively. The competitive landscape features a mix of specialized startups, established industrial firms, and research institutions collaborating to overcome challenges in scalability and standardization.
President & Fellows of Harvard College
Technical Solution: Harvard's Wyss Institute has pioneered soft pneumatic actuators through their groundbreaking work on soft robotics. Their patented technologies include multi-gait soft robots using embedded pneumatic networks (PneuNets) that enable complex motion with simple pressurization. These systems feature elastomeric structures with embedded air channels that, when pressurized, create predetermined deformations. Harvard has developed manufacturing techniques for creating these structures using multi-material 3D printing and soft lithography processes. Their innovations extend to untethered soft robots with onboard control systems, power sources, and pneumatic components. A significant advancement is their development of fluidic logic gates within soft materials, allowing computational capabilities without electronic components. Harvard has also patented hybrid systems combining soft pneumatics with rigid components for enhanced functionality and precision in medical devices and wearable technologies.
Strengths: Pioneering research in biomimetic designs; extensive patent portfolio covering fundamental soft pneumatic technologies; strong integration with medical applications. Weaknesses: Some technologies remain primarily research-focused with limited commercial deployment; complexity in scaling manufacturing for mass production.
Festo SE & Co. KG
Technical Solution: Festo has developed an extensive portfolio of patented soft pneumatic technologies centered around their Bionic Learning Network initiative. Their innovations include the BionicSoftHand, which utilizes pneumatic bellows structures covered with elastic, tactile-sensitive knitted fabric to create human-like gripping capabilities. The company's patented Fluidic Muscle technology represents a significant advancement in pneumatic actuators, consisting of a contractile tube with embedded reinforcing fibers that contract axially when pressurized, mimicking natural muscle behavior. Festo has also pioneered the BionicSoftArm, a pneumatically operated robotic arm with modular, flexible segments that can work safely alongside humans without protective barriers. Their DualRobotics concept combines conventional pneumatics with soft pneumatic elements to achieve both precision and adaptability. Additionally, Festo has patented pneumatic control systems specifically designed for soft actuators, including proportional valves and compact, integrated control units that enable precise pressure regulation.
Strengths: Strong industrial application focus with commercially viable products; extensive manufacturing expertise; comprehensive ecosystem of pneumatic components and control systems. Weaknesses: Technologies often require specialized pneumatic infrastructure; higher cost compared to conventional rigid systems; some limitations in force generation compared to traditional actuators.
Key Patent Analysis and Technical Innovations
Manufacturing Soft Devices Out of Sheet Materials
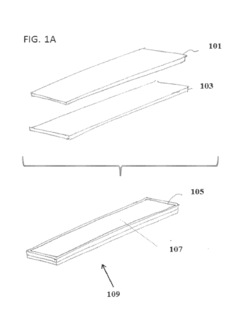
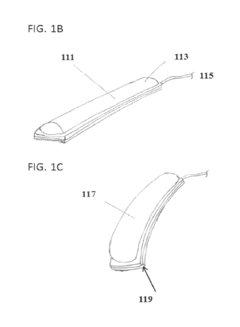
PatentActiveUS20190024679A1
Innovation
- Soft composite actuators are manufactured by bonding multiple material layers, including elastomeric, strain limiting, and radially constraining layers, to form bladders that can be actuated by pressurized fluid, allowing for efficient bending, linear extension, and twisting motions without the need for molding.
Multi-layered soft pneumatic actuator and robot mechanism including the same
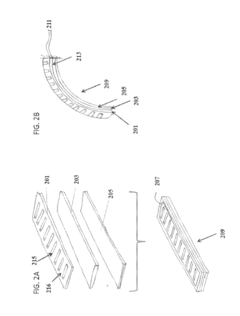
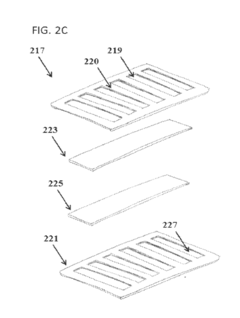
PatentActiveUS20230166408A1
Innovation
- A multi-layer soft pneumatic actuator with driving protrusions and chambers that provide surface driving force, allowing for rotation or movement of objects while being held, by injecting air into overlapping chambers to control the position and direction of the protrusions.




Materials Science Advancements for Soft Robotics
The evolution of soft robotics has been significantly influenced by breakthroughs in materials science. Traditional rigid materials have given way to innovative soft, compliant materials that enable pneumatic actuation systems to achieve biomimetic movements and adaptability. Silicone elastomers, particularly polydimethylsiloxane (PDMS), have emerged as foundational materials due to their excellent elasticity, durability, and manufacturing versatility. Recent advancements have introduced specialized formulations with varying Shore hardness values, allowing engineers to precisely tune mechanical properties for specific applications.
Composite materials represent another frontier, combining elastomers with functional additives to enhance performance characteristics. Fiber-reinforced elastomers have demonstrated superior strength-to-weight ratios while maintaining flexibility, addressing previous limitations in load-bearing capabilities. These composites often incorporate carbon fibers, Kevlar, or natural fibers strategically oriented to control deformation patterns during pneumatic actuation.
Stimuli-responsive materials have revolutionized soft pneumatic systems by enabling programmable behavior. Shape memory polymers (SMPs) can transition between predetermined configurations in response to temperature changes, while liquid crystal elastomers (LCEs) exhibit directional actuation properties. These materials facilitate complex motion sequences with minimal control inputs, simplifying system architecture.
Nanomaterial integration has yielded remarkable improvements in sensing capabilities and structural integrity. Carbon nanotubes and graphene incorporated into elastomer matrices create conductive networks that change resistance during deformation, enabling intrinsic sensing functionality. This advancement eliminates the need for discrete sensors, reducing system complexity while enhancing feedback precision.
Biodegradable and biocompatible materials have expanded application possibilities in medical and environmental contexts. Alginate-based hydrogels and modified cellulose derivatives offer sustainable alternatives to petroleum-based elastomers, addressing growing concerns about environmental impact. These materials maintain necessary mechanical properties while providing safe interaction with biological tissues.
Manufacturing techniques have evolved alongside material innovations. Multi-material 3D printing now enables single-process fabrication of soft pneumatic systems with regionally varied material properties. Direct ink writing and digital light processing methods have achieved micro-scale resolution, allowing for increasingly sophisticated pneumatic channel architectures and integrated sensing elements.
Composite materials represent another frontier, combining elastomers with functional additives to enhance performance characteristics. Fiber-reinforced elastomers have demonstrated superior strength-to-weight ratios while maintaining flexibility, addressing previous limitations in load-bearing capabilities. These composites often incorporate carbon fibers, Kevlar, or natural fibers strategically oriented to control deformation patterns during pneumatic actuation.
Stimuli-responsive materials have revolutionized soft pneumatic systems by enabling programmable behavior. Shape memory polymers (SMPs) can transition between predetermined configurations in response to temperature changes, while liquid crystal elastomers (LCEs) exhibit directional actuation properties. These materials facilitate complex motion sequences with minimal control inputs, simplifying system architecture.
Nanomaterial integration has yielded remarkable improvements in sensing capabilities and structural integrity. Carbon nanotubes and graphene incorporated into elastomer matrices create conductive networks that change resistance during deformation, enabling intrinsic sensing functionality. This advancement eliminates the need for discrete sensors, reducing system complexity while enhancing feedback precision.
Biodegradable and biocompatible materials have expanded application possibilities in medical and environmental contexts. Alginate-based hydrogels and modified cellulose derivatives offer sustainable alternatives to petroleum-based elastomers, addressing growing concerns about environmental impact. These materials maintain necessary mechanical properties while providing safe interaction with biological tissues.
Manufacturing techniques have evolved alongside material innovations. Multi-material 3D printing now enables single-process fabrication of soft pneumatic systems with regionally varied material properties. Direct ink writing and digital light processing methods have achieved micro-scale resolution, allowing for increasingly sophisticated pneumatic channel architectures and integrated sensing elements.
Standardization and Safety Considerations
The standardization of soft pneumatic systems remains a critical challenge in the industry, with significant implications for both commercial adoption and safety assurance. Currently, there exists a notable gap in comprehensive standards specifically tailored for soft pneumatic technologies, forcing manufacturers to adapt guidelines from related fields such as traditional pneumatics, medical devices, or robotics. This fragmented approach creates inconsistencies in design parameters, testing methodologies, and performance metrics across different applications and regions.
International organizations including ISO and ASTM have begun preliminary work on developing standards for soft robotics, with working groups focusing on terminology, testing protocols, and safety requirements. However, these efforts remain in nascent stages, with few formalized documents published to date. The IEEE Robotics and Automation Society has also established a technical committee addressing soft robotics standardization, though their work primarily focuses on performance benchmarking rather than safety protocols.
Safety considerations for soft pneumatic systems present unique challenges distinct from rigid pneumatics. Material degradation patterns, failure modes, and risk profiles differ substantially, necessitating specialized approaches. Patented technologies have introduced various safety mechanisms, including pressure-relief valves calibrated specifically for elastomeric materials, redundant sensing systems that detect microscopic leaks before catastrophic failure, and compartmentalized designs that limit failure propagation.
Regulatory frameworks across different jurisdictions impose varying requirements on soft pneumatic systems. The European Union's Machinery Directive and Medical Device Regulation contain provisions applicable to soft pneumatic technologies, while the FDA in the United States has issued guidance documents for soft robotic devices intended for medical applications. These regulatory disparities create compliance challenges for manufacturers targeting global markets.
Risk assessment methodologies for soft pneumatic systems must account for their unique characteristics, including non-linear deformation behaviors, material fatigue patterns specific to elastomers, and potential interactions with human users. Several patented technologies have introduced novel testing protocols that simulate accelerated aging of soft pneumatic components, providing more accurate lifetime predictions than traditional pneumatic testing standards.
The development of unified standards represents a significant opportunity for industry advancement, potentially accelerating commercialization by establishing clear benchmarks for performance, reliability, and safety. Collaborative efforts between academic institutions, industry leaders, and regulatory bodies will be essential to create comprehensive standards that balance innovation with necessary safety precautions.
International organizations including ISO and ASTM have begun preliminary work on developing standards for soft robotics, with working groups focusing on terminology, testing protocols, and safety requirements. However, these efforts remain in nascent stages, with few formalized documents published to date. The IEEE Robotics and Automation Society has also established a technical committee addressing soft robotics standardization, though their work primarily focuses on performance benchmarking rather than safety protocols.
Safety considerations for soft pneumatic systems present unique challenges distinct from rigid pneumatics. Material degradation patterns, failure modes, and risk profiles differ substantially, necessitating specialized approaches. Patented technologies have introduced various safety mechanisms, including pressure-relief valves calibrated specifically for elastomeric materials, redundant sensing systems that detect microscopic leaks before catastrophic failure, and compartmentalized designs that limit failure propagation.
Regulatory frameworks across different jurisdictions impose varying requirements on soft pneumatic systems. The European Union's Machinery Directive and Medical Device Regulation contain provisions applicable to soft pneumatic technologies, while the FDA in the United States has issued guidance documents for soft robotic devices intended for medical applications. These regulatory disparities create compliance challenges for manufacturers targeting global markets.
Risk assessment methodologies for soft pneumatic systems must account for their unique characteristics, including non-linear deformation behaviors, material fatigue patterns specific to elastomers, and potential interactions with human users. Several patented technologies have introduced novel testing protocols that simulate accelerated aging of soft pneumatic components, providing more accurate lifetime predictions than traditional pneumatic testing standards.
The development of unified standards represents a significant opportunity for industry advancement, potentially accelerating commercialization by establishing clear benchmarks for performance, reliability, and safety. Collaborative efforts between academic institutions, industry leaders, and regulatory bodies will be essential to create comprehensive standards that balance innovation with necessary safety precautions.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!