

Regulatory Developments Impacting Soft Pneumatic Actuators
OCT 8, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Soft Pneumatic Actuators Background and Objectives
Soft pneumatic actuators (SPAs) represent a revolutionary advancement in the field of robotics and automation, emerging from the convergence of materials science, mechanical engineering, and biomimetics. These flexible, compliant mechanisms utilize pneumatic pressure to generate motion and force, offering significant advantages over traditional rigid actuators in terms of safety, adaptability, and human-machine interaction capabilities.
The evolution of SPAs can be traced back to the early 1990s, when researchers began exploring alternatives to conventional rigid actuators. The field gained significant momentum in the 2000s with the development of soft materials and fabrication techniques that enabled more sophisticated designs. Over the past decade, SPAs have transitioned from laboratory curiosities to practical components in various applications, including medical devices, assistive technologies, and industrial automation.
Current technological trends in the SPA domain include miniaturization for microscale applications, integration with sensing capabilities for closed-loop control, development of multi-material fabrication techniques, and exploration of alternative actuation methods such as chemical reactions and phase-change materials. These trends are driving SPAs toward higher performance, reliability, and functionality.
The regulatory landscape surrounding SPAs has evolved significantly as these technologies approach widespread commercial deployment. Initially operating in a regulatory vacuum, SPAs now face increasing scrutiny as they enter sensitive application domains such as healthcare, wearable technology, and collaborative robotics. This evolving regulatory framework presents both challenges and opportunities for technology developers and implementers.
The primary objectives of this technical research report are threefold. First, to comprehensively map the current regulatory requirements affecting the development, testing, and deployment of soft pneumatic actuators across major global markets. Second, to identify potential regulatory gaps and emerging policy directions that may impact future SPA innovations. Third, to provide strategic recommendations for navigating the complex regulatory environment while maintaining technological advancement and market competitiveness.
This analysis aims to bridge the gap between technical innovation and regulatory compliance, ensuring that advancements in SPA technology can be effectively translated into market-ready products that meet all necessary safety, performance, and environmental standards. By anticipating regulatory developments, stakeholders can proactively address compliance requirements rather than reactively responding to regulatory challenges.
The evolution of SPAs can be traced back to the early 1990s, when researchers began exploring alternatives to conventional rigid actuators. The field gained significant momentum in the 2000s with the development of soft materials and fabrication techniques that enabled more sophisticated designs. Over the past decade, SPAs have transitioned from laboratory curiosities to practical components in various applications, including medical devices, assistive technologies, and industrial automation.
Current technological trends in the SPA domain include miniaturization for microscale applications, integration with sensing capabilities for closed-loop control, development of multi-material fabrication techniques, and exploration of alternative actuation methods such as chemical reactions and phase-change materials. These trends are driving SPAs toward higher performance, reliability, and functionality.
The regulatory landscape surrounding SPAs has evolved significantly as these technologies approach widespread commercial deployment. Initially operating in a regulatory vacuum, SPAs now face increasing scrutiny as they enter sensitive application domains such as healthcare, wearable technology, and collaborative robotics. This evolving regulatory framework presents both challenges and opportunities for technology developers and implementers.
The primary objectives of this technical research report are threefold. First, to comprehensively map the current regulatory requirements affecting the development, testing, and deployment of soft pneumatic actuators across major global markets. Second, to identify potential regulatory gaps and emerging policy directions that may impact future SPA innovations. Third, to provide strategic recommendations for navigating the complex regulatory environment while maintaining technological advancement and market competitiveness.
This analysis aims to bridge the gap between technical innovation and regulatory compliance, ensuring that advancements in SPA technology can be effectively translated into market-ready products that meet all necessary safety, performance, and environmental standards. By anticipating regulatory developments, stakeholders can proactively address compliance requirements rather than reactively responding to regulatory challenges.
Market Demand Analysis for Soft Robotics Applications
The global market for soft robotics applications has been experiencing significant growth, driven by increasing demand across various sectors. The soft pneumatic actuator segment, in particular, has gained substantial traction due to its inherent safety features, adaptability, and compliance with human interaction requirements. Current market analysis indicates that healthcare and medical applications represent the largest market share for soft pneumatic actuators, with surgical assistants, rehabilitation devices, and prosthetics leading adoption.
Manufacturing and industrial automation sectors are rapidly emerging as key growth areas, with companies seeking safer human-robot collaboration solutions that can operate alongside human workers without rigid barriers. The market demand is particularly strong for soft pneumatic actuators that can handle delicate objects and perform complex manipulation tasks previously challenging for traditional rigid robots.
Consumer robotics represents another expanding market segment, with increasing interest in assistive robots for elderly care, household tasks, and educational purposes. These applications benefit from the inherent safety characteristics of soft pneumatic actuators, making them ideal for environments with direct human interaction.
Geographically, North America currently leads the market demand for soft robotics applications, followed by Europe and Asia-Pacific. However, the Asia-Pacific region is projected to witness the fastest growth rate due to increasing industrial automation initiatives, healthcare expenditure, and research activities in countries like Japan, South Korea, and China.
Market research reveals that end-users are primarily seeking soft pneumatic actuator solutions that offer improved force-to-weight ratios, enhanced durability, and more precise control mechanisms. Additionally, there is growing demand for standardized components and modular designs that can reduce implementation costs and accelerate deployment across various applications.
The regulatory landscape significantly influences market demand patterns, with industries subject to stringent safety regulations showing particular interest in soft pneumatic technologies. Healthcare providers, for instance, are increasingly adopting soft robotic solutions that comply with medical device regulations while offering safer patient interaction compared to traditional rigid systems.
Cost considerations remain a significant factor affecting market penetration, with many potential end-users citing high implementation costs as a barrier to adoption. However, as manufacturing processes mature and economies of scale develop, this barrier is expected to diminish, potentially leading to accelerated market growth in previously cost-sensitive application areas.
Manufacturing and industrial automation sectors are rapidly emerging as key growth areas, with companies seeking safer human-robot collaboration solutions that can operate alongside human workers without rigid barriers. The market demand is particularly strong for soft pneumatic actuators that can handle delicate objects and perform complex manipulation tasks previously challenging for traditional rigid robots.
Consumer robotics represents another expanding market segment, with increasing interest in assistive robots for elderly care, household tasks, and educational purposes. These applications benefit from the inherent safety characteristics of soft pneumatic actuators, making them ideal for environments with direct human interaction.
Geographically, North America currently leads the market demand for soft robotics applications, followed by Europe and Asia-Pacific. However, the Asia-Pacific region is projected to witness the fastest growth rate due to increasing industrial automation initiatives, healthcare expenditure, and research activities in countries like Japan, South Korea, and China.
Market research reveals that end-users are primarily seeking soft pneumatic actuator solutions that offer improved force-to-weight ratios, enhanced durability, and more precise control mechanisms. Additionally, there is growing demand for standardized components and modular designs that can reduce implementation costs and accelerate deployment across various applications.
The regulatory landscape significantly influences market demand patterns, with industries subject to stringent safety regulations showing particular interest in soft pneumatic technologies. Healthcare providers, for instance, are increasingly adopting soft robotic solutions that comply with medical device regulations while offering safer patient interaction compared to traditional rigid systems.
Cost considerations remain a significant factor affecting market penetration, with many potential end-users citing high implementation costs as a barrier to adoption. However, as manufacturing processes mature and economies of scale develop, this barrier is expected to diminish, potentially leading to accelerated market growth in previously cost-sensitive application areas.
Current Regulatory Landscape and Technical Challenges
The regulatory landscape for soft pneumatic actuators (SPAs) is currently characterized by a fragmented approach across different regions and industries. In the United States, the Food and Drug Administration (FDA) has established specific guidelines for medical applications of SPAs, particularly under the 510(k) clearance pathway for devices that interface with human tissue. Meanwhile, the European Union's Medical Device Regulation (MDR) imposes more stringent requirements for clinical validation and post-market surveillance of SPA-based medical technologies.
For industrial applications, the International Organization for Standardization (ISO) has developed ISO 13849 and IEC 61508 standards that address functional safety aspects of pneumatic systems, though these were not specifically designed for soft actuators. This regulatory gap creates compliance challenges for manufacturers attempting to integrate SPAs into safety-critical industrial environments.
A significant technical challenge emerges from the inherent material properties of SPAs. The viscoelastic behavior of elastomeric materials used in these actuators leads to hysteresis and non-linear responses that complicate precise control and predictability—qualities demanded by regulatory frameworks. This inconsistency in performance creates barriers to meeting repeatability requirements specified in standards such as ASTM F3172 for robotic systems.
Material degradation represents another critical challenge at the intersection of technical limitations and regulatory compliance. Current elastomers used in SPAs exhibit aging effects when exposed to environmental factors like UV radiation, ozone, and temperature fluctuations. Regulatory bodies increasingly require lifecycle testing and durability assessments that many SPA technologies struggle to satisfy due to these material limitations.
The lack of standardized testing protocols specifically designed for soft robotics further complicates regulatory approval processes. While traditional rigid actuators have well-established testing methodologies, SPAs operate under fundamentally different principles, rendering conventional metrics inadequate. This testing gap has prompted organizations like the IEEE Robotics and Automation Society to form working groups dedicated to developing soft robotics standards, though comprehensive frameworks remain years away from implementation.
Cybersecurity considerations have emerged as a surprising regulatory challenge for advanced SPAs that incorporate electronic control systems. Recent regulations like the EU's Cyber Resilience Act impose security-by-design requirements that affect pneumatic systems with digital interfaces. The integration of pressure sensors and control electronics in modern SPAs creates potential vulnerabilities that must be addressed to achieve regulatory compliance in connected environments.
For industrial applications, the International Organization for Standardization (ISO) has developed ISO 13849 and IEC 61508 standards that address functional safety aspects of pneumatic systems, though these were not specifically designed for soft actuators. This regulatory gap creates compliance challenges for manufacturers attempting to integrate SPAs into safety-critical industrial environments.
A significant technical challenge emerges from the inherent material properties of SPAs. The viscoelastic behavior of elastomeric materials used in these actuators leads to hysteresis and non-linear responses that complicate precise control and predictability—qualities demanded by regulatory frameworks. This inconsistency in performance creates barriers to meeting repeatability requirements specified in standards such as ASTM F3172 for robotic systems.
Material degradation represents another critical challenge at the intersection of technical limitations and regulatory compliance. Current elastomers used in SPAs exhibit aging effects when exposed to environmental factors like UV radiation, ozone, and temperature fluctuations. Regulatory bodies increasingly require lifecycle testing and durability assessments that many SPA technologies struggle to satisfy due to these material limitations.
The lack of standardized testing protocols specifically designed for soft robotics further complicates regulatory approval processes. While traditional rigid actuators have well-established testing methodologies, SPAs operate under fundamentally different principles, rendering conventional metrics inadequate. This testing gap has prompted organizations like the IEEE Robotics and Automation Society to form working groups dedicated to developing soft robotics standards, though comprehensive frameworks remain years away from implementation.
Cybersecurity considerations have emerged as a surprising regulatory challenge for advanced SPAs that incorporate electronic control systems. Recent regulations like the EU's Cyber Resilience Act impose security-by-design requirements that affect pneumatic systems with digital interfaces. The integration of pressure sensors and control electronics in modern SPAs creates potential vulnerabilities that must be addressed to achieve regulatory compliance in connected environments.
Compliance Frameworks and Technical Standards
01 Design and structure of soft pneumatic actuators
Soft pneumatic actuators are designed with flexible materials that deform when pressurized with air or fluid. These structures typically include chambers, channels, or bellows that expand in predetermined directions to create movement. The design may incorporate reinforcement elements to control deformation patterns and enhance performance. Various geometrical configurations can be employed to achieve different types of motion, such as bending, twisting, or extending.- Design and structure of soft pneumatic actuators: Soft pneumatic actuators are designed with flexible materials that deform when pressurized with air. These structures typically include chambers or channels that expand in predetermined directions to create movement. The design may incorporate various geometries and reinforcement patterns to control the direction and type of motion, such as bending, twisting, or extending. These actuators offer advantages in terms of compliance, safety, and adaptability to different environments.
- Materials for soft pneumatic actuators: The selection of materials is crucial for the performance of soft pneumatic actuators. Common materials include silicone elastomers, rubber compounds, and other flexible polymers that can withstand repeated inflation and deflation cycles. Some designs incorporate fiber reinforcements, fabric layers, or composite structures to control deformation patterns and increase durability. Advanced materials may also feature self-healing properties or variable stiffness characteristics to enhance functionality.
- Control systems and pneumatic networks: Effective control systems are essential for precise operation of soft pneumatic actuators. These systems typically include pressure regulators, valves, sensors, and control algorithms that manage air flow and pressure distribution. Some designs feature distributed pneumatic networks that allow for complex movements through selective actuation of different chambers. Advanced control strategies may incorporate machine learning or adaptive algorithms to improve performance and respond to changing conditions.
- Applications in robotics and biomimetics: Soft pneumatic actuators are widely used in soft robotics and biomimetic designs that mimic natural movements. Applications include robotic grippers for delicate object manipulation, wearable assistive devices, medical tools for minimally invasive procedures, and bio-inspired robots that can navigate complex environments. These actuators are particularly valuable when interacting with humans or fragile objects due to their inherent compliance and safety characteristics.
- Fabrication methods and manufacturing techniques: Various fabrication methods are employed to create soft pneumatic actuators, including molding, 3D printing, and layered manufacturing. These techniques allow for the creation of complex internal channels and chambers necessary for controlled actuation. Advanced manufacturing approaches may incorporate multi-material printing, embedded sensors, or automated assembly processes to enhance functionality and scalability. The fabrication method significantly influences the actuator's performance characteristics, durability, and cost-effectiveness.
02 Materials for soft pneumatic actuators
The selection of materials is crucial for soft pneumatic actuators, with elastomers like silicone rubber being commonly used due to their flexibility and durability. These materials need to withstand repeated inflation and deflation cycles while maintaining their mechanical properties. Some advanced actuators incorporate composite materials or fiber reinforcements to enhance strength and control deformation. Biocompatible materials may be used for medical applications, while industrial applications might require materials with specific temperature or chemical resistance properties.Expand Specific Solutions03 Control systems for soft pneumatic actuators
Control systems for soft pneumatic actuators typically include pressure regulators, valves, sensors, and electronic controllers. These systems manage the air or fluid flow into the actuator chambers to achieve precise movements. Advanced control strategies may incorporate feedback mechanisms using pressure sensors or position tracking to improve accuracy and responsiveness. Some systems employ machine learning algorithms to optimize performance or adapt to changing conditions. The integration of these control systems with the soft actuators presents unique challenges due to the nonlinear behavior of soft materials.Expand Specific Solutions04 Applications in robotics and automation
Soft pneumatic actuators are increasingly used in robotics and automation due to their inherent compliance and safety when interacting with humans or delicate objects. They are employed in grippers for handling fragile items, in wearable assistive devices, and in collaborative robots. Their flexibility allows them to conform to irregular shapes, making them suitable for applications in unstructured environments. The inherent compliance of these actuators provides a natural damping effect, reducing the risk of damage during unexpected collisions and making them ideal for human-robot interaction scenarios.Expand Specific Solutions05 Fabrication methods for soft pneumatic actuators
Various fabrication techniques are employed to create soft pneumatic actuators, including molding, 3D printing, and lamination processes. Molding techniques often involve creating a negative mold into which elastomer materials are poured and cured. 3D printing allows for more complex internal structures and customization of actuator properties. Some fabrication methods combine multiple materials with different mechanical properties to achieve specific performance characteristics. The manufacturing process must ensure airtight seals and consistent material properties to maintain reliable operation under repeated pressurization cycles.Expand Specific Solutions
Key Regulatory Bodies and Industry Stakeholders
The regulatory landscape for Soft Pneumatic Actuators is evolving rapidly as this technology transitions from research to commercialization. Currently in the early growth phase, the market is projected to expand significantly due to applications in healthcare, robotics, and industrial automation. Leading academic institutions (Harvard, MIT, NUS) are driving fundamental research, while companies are beginning to commercialize applications. Established corporations like Toyota, Hyundai, and Kia are investing in soft robotics for automotive applications, while specialized firms like Bioliberty and RIVERFIELD focus on medical implementations. Oxipital AI and Beijing Soft Robot Technology represent the emerging commercial ecosystem developing specialized applications. Regulatory frameworks are still developing, with safety standards and medical device approvals representing key challenges for widespread adoption.
President & Fellows of Harvard College
Technical Solution: Harvard's Wyss Institute has pioneered regulatory-compliant soft pneumatic actuators through their "PneuNets" technology. Their approach focuses on developing soft robotic systems that meet FDA requirements for medical applications, particularly in rehabilitation and surgical assistance. Their technical solution incorporates biocompatible materials like silicone elastomers that comply with ISO 10993 standards for biocompatibility, addressing key regulatory concerns for human-robot interaction. Harvard has developed a comprehensive regulatory framework that includes risk assessment methodologies specifically for soft pneumatic systems, allowing for classification under appropriate regulatory pathways. Their technical approach includes fail-safe mechanisms that prevent excessive pressure or force application, addressing safety regulations across multiple jurisdictions. Harvard researchers have also developed standardized testing protocols for soft actuators that align with IEC 60601 requirements for medical electrical equipment.
Strengths: Strong academic research foundation with extensive clinical testing experience; established relationships with regulatory bodies; comprehensive understanding of medical device approval pathways. Weaknesses: Commercialization challenges when transitioning from research to market; longer development timelines due to rigorous compliance testing requirements.
The Regents of the University of California
Technical Solution: UC system researchers have developed a comprehensive approach to regulatory compliance for soft pneumatic actuators through their "Soft Robotics Toolkit" initiative. Their technical solution addresses the fragmented regulatory landscape by creating standardized testing methodologies that can be applied across different application domains. UC researchers have pioneered adaptive control systems that automatically adjust actuator behavior to remain within regulatory-defined safety parameters for different use contexts. Their technical approach incorporates comprehensive documentation frameworks that facilitate regulatory approval by providing standardized performance data aligned with ISO and ASTM requirements. The UC system has developed modular compliance architectures where actuator components can be certified independently and then integrated into larger systems without requiring complete recertification, addressing a key challenge in the regulatory process for complex robotic systems. Their technical solution includes risk assessment methodologies specifically designed for soft pneumatic systems in healthcare, industrial, and consumer applications.
Strengths: Broad research expertise across multiple campuses; strong connections to both medical and industrial regulatory frameworks; extensive experience with technology transfer to commercial applications. Weaknesses: Decentralized research approach may create inconsistencies in regulatory strategy; academic focus may sometimes prioritize innovation over compliance considerations.
Critical Regulatory Documents and Technical Guidelines
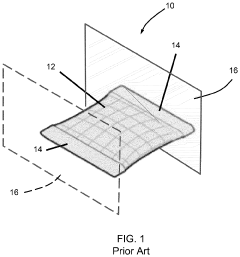
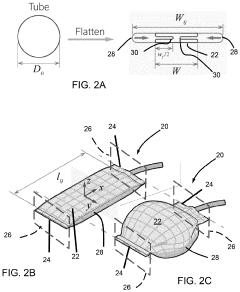
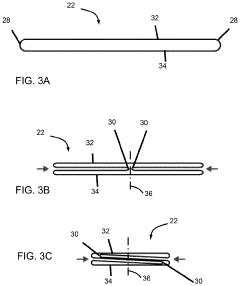
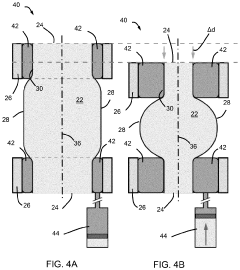
Pneumatic soft actuators with tunable force-displacement relation and methods and machines therefor
PatentPendingUS20230373082A1
Innovation
- A pneumatic soft actuator with an inflatable pouch featuring symmetrical folds at its ends, allowing for active modification of the end geometry through a branched tendon and spool mechanism, enabling adjustment of the force-strain relationship and range of motion without altering the pouch's composition or structure.
Safety and Risk Assessment Methodologies
The safety assessment of soft pneumatic actuators (SPAs) requires specialized methodologies that address their unique characteristics compared to traditional rigid actuators. Current risk assessment frameworks for SPAs combine elements from medical device evaluation, robotics safety protocols, and pressure system regulations. These methodologies typically employ a multi-tiered approach beginning with hazard identification specific to the compliant nature of these systems, followed by risk estimation that considers both the probability and severity of potential failures.
Failure Mode and Effects Analysis (FMEA) has been adapted specifically for soft robotics applications, with particular attention to material degradation, air leakage scenarios, and unexpected behavior under varying pneumatic pressures. This modified FMEA incorporates material fatigue testing data and accounts for the non-linear response characteristics of elastomeric materials used in SPAs. Recent developments have seen the integration of real-time monitoring systems that can detect early signs of material stress or performance degradation.
Pressure safety testing protocols for SPAs differ significantly from those used for rigid pneumatic systems. Standard procedures now include cyclic loading tests that simulate extended operation periods, environmental exposure assessments to evaluate material degradation under various conditions, and burst pressure testing with appropriate safety margins. These tests must account for the hyperelastic properties of SPA materials and their potential for sudden failure modes that may not present warning signs typical in rigid systems.
Human-robot interaction safety assessments for SPAs have evolved to incorporate biomechanical impact models that leverage the inherent compliance of these actuators. These models quantify the force transmission characteristics during potential collisions and evaluate tissue damage potential across various operational scenarios. The development of standardized testing mannequins with tissue-mimicking properties has enhanced the accuracy of these assessments, allowing for more precise safety margin calculations.
Computational simulation approaches have become increasingly important in SPA safety assessment, with finite element analysis (FEA) models now capable of predicting material behavior under complex loading conditions. These simulations can identify potential failure points before physical prototyping and help optimize designs for safety. Recent advances in machine learning techniques have further enhanced these capabilities by enabling predictive maintenance models that can anticipate potential failures based on operational data patterns.
Regulatory bodies are increasingly adopting risk-based approaches that consider the intended application environment of SPAs. This has led to the development of application-specific safety assessment frameworks that recognize the different risk profiles of SPAs in industrial, medical, and consumer settings. These frameworks incorporate both quantitative metrics like maximum pressure limitations and qualitative assessments of potential misuse scenarios to establish comprehensive safety guidelines.
Failure Mode and Effects Analysis (FMEA) has been adapted specifically for soft robotics applications, with particular attention to material degradation, air leakage scenarios, and unexpected behavior under varying pneumatic pressures. This modified FMEA incorporates material fatigue testing data and accounts for the non-linear response characteristics of elastomeric materials used in SPAs. Recent developments have seen the integration of real-time monitoring systems that can detect early signs of material stress or performance degradation.
Pressure safety testing protocols for SPAs differ significantly from those used for rigid pneumatic systems. Standard procedures now include cyclic loading tests that simulate extended operation periods, environmental exposure assessments to evaluate material degradation under various conditions, and burst pressure testing with appropriate safety margins. These tests must account for the hyperelastic properties of SPA materials and their potential for sudden failure modes that may not present warning signs typical in rigid systems.
Human-robot interaction safety assessments for SPAs have evolved to incorporate biomechanical impact models that leverage the inherent compliance of these actuators. These models quantify the force transmission characteristics during potential collisions and evaluate tissue damage potential across various operational scenarios. The development of standardized testing mannequins with tissue-mimicking properties has enhanced the accuracy of these assessments, allowing for more precise safety margin calculations.
Computational simulation approaches have become increasingly important in SPA safety assessment, with finite element analysis (FEA) models now capable of predicting material behavior under complex loading conditions. These simulations can identify potential failure points before physical prototyping and help optimize designs for safety. Recent advances in machine learning techniques have further enhanced these capabilities by enabling predictive maintenance models that can anticipate potential failures based on operational data patterns.
Regulatory bodies are increasingly adopting risk-based approaches that consider the intended application environment of SPAs. This has led to the development of application-specific safety assessment frameworks that recognize the different risk profiles of SPAs in industrial, medical, and consumer settings. These frameworks incorporate both quantitative metrics like maximum pressure limitations and qualitative assessments of potential misuse scenarios to establish comprehensive safety guidelines.
Cross-Border Regulatory Harmonization Strategies
The global landscape for soft pneumatic actuator regulations presents significant challenges due to varying standards across different jurisdictions. Achieving cross-border regulatory harmonization requires strategic approaches that balance innovation with compliance across multiple regulatory frameworks. Currently, manufacturers of soft pneumatic actuators face a complex patchwork of regulations that differ substantially between North America, Europe, and Asia-Pacific regions, creating barriers to global market entry and increasing compliance costs.
International standardization bodies such as ISO and IEC have begun developing frameworks specifically addressing soft robotics technologies, though these efforts remain in nascent stages. The IEEE Standards Association has established working groups focused on soft actuator safety protocols, which represent promising steps toward global consensus. These initiatives aim to create universally applicable technical standards that can be referenced by national regulatory bodies.
Mutual Recognition Agreements (MRAs) between key markets offer a practical pathway to harmonization. The EU-US MRA for medical devices provides a potential template for soft pneumatic actuators used in healthcare applications. Similar agreements could be developed for industrial and consumer applications, reducing redundant testing and certification requirements while maintaining safety standards.
Regulatory sandboxes have emerged as effective tools for cross-border collaboration. These controlled testing environments allow manufacturers to demonstrate compliance with multiple regulatory frameworks simultaneously. Japan's METI and Singapore's Enterprise Singapore have pioneered such approaches for soft robotics technologies, creating models that could be expanded to other jurisdictions.
Industry consortia play a crucial role in driving harmonization efforts. The International Soft Robotics Consortium, comprising manufacturers, research institutions, and regulatory experts, has developed voluntary standards that are increasingly recognized across borders. These industry-led initiatives often precede and inform formal regulatory frameworks, accelerating the path to harmonization.
Digital compliance platforms represent a technological solution to navigating diverse regulatory requirements. These systems can track regulatory changes across jurisdictions, map compliance requirements, and generate appropriate documentation for different markets. Such platforms are particularly valuable for SMEs developing soft pneumatic actuator technologies without extensive regulatory affairs departments.
Ultimately, successful cross-border harmonization will require a multi-stakeholder approach combining formal regulatory cooperation, industry self-regulation, and technological solutions for compliance management. Progressive alignment of safety standards, testing protocols, and certification processes will reduce market barriers while ensuring that soft pneumatic actuators meet appropriate safety and performance requirements regardless of where they are deployed.
International standardization bodies such as ISO and IEC have begun developing frameworks specifically addressing soft robotics technologies, though these efforts remain in nascent stages. The IEEE Standards Association has established working groups focused on soft actuator safety protocols, which represent promising steps toward global consensus. These initiatives aim to create universally applicable technical standards that can be referenced by national regulatory bodies.
Mutual Recognition Agreements (MRAs) between key markets offer a practical pathway to harmonization. The EU-US MRA for medical devices provides a potential template for soft pneumatic actuators used in healthcare applications. Similar agreements could be developed for industrial and consumer applications, reducing redundant testing and certification requirements while maintaining safety standards.
Regulatory sandboxes have emerged as effective tools for cross-border collaboration. These controlled testing environments allow manufacturers to demonstrate compliance with multiple regulatory frameworks simultaneously. Japan's METI and Singapore's Enterprise Singapore have pioneered such approaches for soft robotics technologies, creating models that could be expanded to other jurisdictions.
Industry consortia play a crucial role in driving harmonization efforts. The International Soft Robotics Consortium, comprising manufacturers, research institutions, and regulatory experts, has developed voluntary standards that are increasingly recognized across borders. These industry-led initiatives often precede and inform formal regulatory frameworks, accelerating the path to harmonization.
Digital compliance platforms represent a technological solution to navigating diverse regulatory requirements. These systems can track regulatory changes across jurisdictions, map compliance requirements, and generate appropriate documentation for different markets. Such platforms are particularly valuable for SMEs developing soft pneumatic actuator technologies without extensive regulatory affairs departments.
Ultimately, successful cross-border harmonization will require a multi-stakeholder approach combining formal regulatory cooperation, industry self-regulation, and technological solutions for compliance management. Progressive alignment of safety standards, testing protocols, and certification processes will reduce market barriers while ensuring that soft pneumatic actuators meet appropriate safety and performance requirements regardless of where they are deployed.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!