Why Soft Pneumatic Actuators Are Key to Future Mobility Solutions
OCT 8, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Soft Pneumatic Actuator Evolution and Objectives
Soft Pneumatic Actuators (SPAs) have evolved significantly over the past decades, transitioning from rudimentary inflatable structures to sophisticated biomimetic systems capable of complex movements. The journey began in the 1950s with the development of basic pneumatic artificial muscles, primarily McKibben actuators, which found limited applications due to their rigid constraints and binary operation modes. The 1990s marked a pivotal shift with the emergence of materials science advancements, enabling the creation of more compliant and versatile pneumatic systems.
The early 2000s witnessed the integration of elastomeric materials into pneumatic actuator design, fundamentally transforming their capabilities. Researchers at Harvard, MIT, and Tokyo University pioneered soft robotics approaches that leveraged silicone-based materials to create actuators with unprecedented flexibility and adaptability. This period established the foundation for modern SPAs, characterized by their ability to deform continuously and interact safely with their environment.
Between 2010 and 2020, SPA technology experienced exponential growth, driven by innovations in manufacturing techniques such as 3D printing and novel material composites. These developments enabled the creation of actuators with programmable mechanical properties, multi-directional movement capabilities, and enhanced force-to-weight ratios. The introduction of fiber reinforcement strategies and variable wall thickness designs further expanded the functional repertoire of SPAs.
Current technological objectives for SPAs focus on addressing several critical limitations. Energy efficiency remains a primary concern, as conventional SPAs typically require continuous pressure maintenance for sustained actuation. Research aims to develop energy-harvesting mechanisms and improved valve systems to minimize power consumption. Durability represents another significant challenge, with ongoing efforts to create materials resistant to cyclic fatigue and environmental degradation.
Response time optimization constitutes a key objective, as traditional SPAs often exhibit slower actuation speeds compared to their rigid counterparts. Advanced control systems utilizing machine learning algorithms and predictive modeling are being developed to enhance dynamic performance. Additionally, miniaturization efforts seek to create microscale SPAs for medical applications and confined space operations.
The long-term vision for SPA technology encompasses the development of fully integrated, autonomous soft robotic systems capable of adapting to unpredictable environments. This includes the creation of self-healing materials, embedded sensing capabilities, and distributed control architectures. The ultimate objective is to establish SPAs as the foundation for a new generation of mobility solutions that seamlessly blend mechanical compliance with intelligent responsiveness, enabling applications ranging from assistive wearables to disaster response robots and advanced prosthetics.
The early 2000s witnessed the integration of elastomeric materials into pneumatic actuator design, fundamentally transforming their capabilities. Researchers at Harvard, MIT, and Tokyo University pioneered soft robotics approaches that leveraged silicone-based materials to create actuators with unprecedented flexibility and adaptability. This period established the foundation for modern SPAs, characterized by their ability to deform continuously and interact safely with their environment.
Between 2010 and 2020, SPA technology experienced exponential growth, driven by innovations in manufacturing techniques such as 3D printing and novel material composites. These developments enabled the creation of actuators with programmable mechanical properties, multi-directional movement capabilities, and enhanced force-to-weight ratios. The introduction of fiber reinforcement strategies and variable wall thickness designs further expanded the functional repertoire of SPAs.
Current technological objectives for SPAs focus on addressing several critical limitations. Energy efficiency remains a primary concern, as conventional SPAs typically require continuous pressure maintenance for sustained actuation. Research aims to develop energy-harvesting mechanisms and improved valve systems to minimize power consumption. Durability represents another significant challenge, with ongoing efforts to create materials resistant to cyclic fatigue and environmental degradation.
Response time optimization constitutes a key objective, as traditional SPAs often exhibit slower actuation speeds compared to their rigid counterparts. Advanced control systems utilizing machine learning algorithms and predictive modeling are being developed to enhance dynamic performance. Additionally, miniaturization efforts seek to create microscale SPAs for medical applications and confined space operations.
The long-term vision for SPA technology encompasses the development of fully integrated, autonomous soft robotic systems capable of adapting to unpredictable environments. This includes the creation of self-healing materials, embedded sensing capabilities, and distributed control architectures. The ultimate objective is to establish SPAs as the foundation for a new generation of mobility solutions that seamlessly blend mechanical compliance with intelligent responsiveness, enabling applications ranging from assistive wearables to disaster response robots and advanced prosthetics.
Market Analysis for Soft Robotics in Mobility
The soft robotics market within the mobility sector is experiencing significant growth, driven by the unique capabilities of soft pneumatic actuators to address complex movement challenges. Current market analysis indicates that the global soft robotics market is projected to reach $4.9 billion by 2030, with mobility applications representing one of the fastest-growing segments at a compound annual growth rate of 29% through 2028.
The automotive industry has emerged as a primary adopter of soft robotics technology, particularly for advanced driver assistance systems and autonomous vehicle components. These applications benefit from the inherent safety features of soft pneumatic actuators when interacting with humans. Market research shows that over 60% of automotive manufacturers are currently exploring or implementing soft robotic components in their mobility solutions.
Healthcare mobility represents another substantial market segment, with rehabilitation devices and assistive exoskeletons showing particular promise. The aging global population has created increased demand for mobility assistance technologies that can safely interface with human users. Market forecasts suggest the medical soft robotics segment will grow at 32% annually through 2027, outpacing most other application areas.
Consumer-oriented mobility products incorporating soft pneumatic actuators are gaining traction in wearable technology markets. These include enhanced footwear, smart clothing with movement assistance capabilities, and portable rehabilitation devices. This segment is expected to reach $1.2 billion by 2028, representing a significant opportunity for market entrants.
Regional analysis reveals North America currently leads in soft robotics adoption for mobility applications, holding approximately 38% market share. However, Asia-Pacific markets are demonstrating the fastest growth rate at 34% annually, driven by significant investments in Japan, South Korea, and China. European markets maintain strong positions in medical and automotive applications specifically.
Key market barriers include manufacturing scalability challenges and the current high cost of production for custom soft pneumatic systems. Despite these obstacles, decreasing material costs and improved manufacturing techniques are expected to reduce production expenses by approximately 45% over the next five years, significantly expanding market accessibility.
Customer demand analysis indicates growing preference for mobility solutions that offer adaptability to varied environments, energy efficiency, and inherent safety features - all strengths of soft pneumatic actuator technology. This alignment between market needs and technological capabilities suggests continued strong growth potential for soft robotics in mobility applications across multiple sectors.
The automotive industry has emerged as a primary adopter of soft robotics technology, particularly for advanced driver assistance systems and autonomous vehicle components. These applications benefit from the inherent safety features of soft pneumatic actuators when interacting with humans. Market research shows that over 60% of automotive manufacturers are currently exploring or implementing soft robotic components in their mobility solutions.
Healthcare mobility represents another substantial market segment, with rehabilitation devices and assistive exoskeletons showing particular promise. The aging global population has created increased demand for mobility assistance technologies that can safely interface with human users. Market forecasts suggest the medical soft robotics segment will grow at 32% annually through 2027, outpacing most other application areas.
Consumer-oriented mobility products incorporating soft pneumatic actuators are gaining traction in wearable technology markets. These include enhanced footwear, smart clothing with movement assistance capabilities, and portable rehabilitation devices. This segment is expected to reach $1.2 billion by 2028, representing a significant opportunity for market entrants.
Regional analysis reveals North America currently leads in soft robotics adoption for mobility applications, holding approximately 38% market share. However, Asia-Pacific markets are demonstrating the fastest growth rate at 34% annually, driven by significant investments in Japan, South Korea, and China. European markets maintain strong positions in medical and automotive applications specifically.
Key market barriers include manufacturing scalability challenges and the current high cost of production for custom soft pneumatic systems. Despite these obstacles, decreasing material costs and improved manufacturing techniques are expected to reduce production expenses by approximately 45% over the next five years, significantly expanding market accessibility.
Customer demand analysis indicates growing preference for mobility solutions that offer adaptability to varied environments, energy efficiency, and inherent safety features - all strengths of soft pneumatic actuator technology. This alignment between market needs and technological capabilities suggests continued strong growth potential for soft robotics in mobility applications across multiple sectors.
Technical Challenges in Soft Pneumatic Systems
Despite significant advancements in soft pneumatic actuator (SPA) technology, several technical challenges continue to impede their widespread adoption in mobility solutions. Material limitations represent one of the most significant barriers, as current elastomers often struggle to balance the competing requirements of flexibility, durability, and strength. Most commercially available materials exhibit performance degradation under repeated deformation cycles, with stress concentration points frequently leading to premature failure after extended operation periods.
Pressure control and distribution systems present another substantial challenge. Traditional pneumatic control architectures are typically bulky and energy-inefficient, making them poorly suited for mobile applications where weight and power consumption are critical factors. The development of miniaturized, precise pressure regulators capable of rapid response times remains an ongoing engineering challenge, particularly when operating under variable environmental conditions.
Energy efficiency concerns are paramount in mobile applications. Current soft pneumatic systems suffer from considerable energy losses due to air leakage, friction within distribution channels, and inefficient pressure conversion. These inefficiencies necessitate larger air reservoirs or compressors, creating a negative feedback loop that further increases system weight and power requirements.
Manufacturing complexity poses additional obstacles to scalability and cost-effectiveness. The production of SPAs with consistent performance characteristics requires sophisticated molding techniques and precise material handling. Current manufacturing methods often involve labor-intensive manual steps that limit production volume and increase unit costs, making mass-market adoption challenging.
Integration with sensing and control systems represents a frontier challenge. Unlike rigid actuators, soft pneumatic systems deform in complex, non-linear ways that are difficult to model and predict. This complicates the development of accurate closed-loop control systems necessary for precise movement. The integration of distributed sensing elements without compromising the actuator's mechanical properties remains particularly problematic.
Environmental sensitivity further complicates deployment in real-world mobility applications. Performance characteristics of soft pneumatic systems can vary significantly with temperature fluctuations, humidity changes, and exposure to UV radiation or chemicals. Developing materials and designs that maintain consistent performance across diverse operating environments represents a significant research challenge.
Standardization and design methodologies are still in nascent stages. Unlike established mechanical or electrical components, soft pneumatic actuators lack standardized design approaches, performance metrics, and testing protocols. This absence of standardization complicates system integration and slows industry-wide adoption, as engineers must often develop custom solutions rather than leveraging established design principles.
Pressure control and distribution systems present another substantial challenge. Traditional pneumatic control architectures are typically bulky and energy-inefficient, making them poorly suited for mobile applications where weight and power consumption are critical factors. The development of miniaturized, precise pressure regulators capable of rapid response times remains an ongoing engineering challenge, particularly when operating under variable environmental conditions.
Energy efficiency concerns are paramount in mobile applications. Current soft pneumatic systems suffer from considerable energy losses due to air leakage, friction within distribution channels, and inefficient pressure conversion. These inefficiencies necessitate larger air reservoirs or compressors, creating a negative feedback loop that further increases system weight and power requirements.
Manufacturing complexity poses additional obstacles to scalability and cost-effectiveness. The production of SPAs with consistent performance characteristics requires sophisticated molding techniques and precise material handling. Current manufacturing methods often involve labor-intensive manual steps that limit production volume and increase unit costs, making mass-market adoption challenging.
Integration with sensing and control systems represents a frontier challenge. Unlike rigid actuators, soft pneumatic systems deform in complex, non-linear ways that are difficult to model and predict. This complicates the development of accurate closed-loop control systems necessary for precise movement. The integration of distributed sensing elements without compromising the actuator's mechanical properties remains particularly problematic.
Environmental sensitivity further complicates deployment in real-world mobility applications. Performance characteristics of soft pneumatic systems can vary significantly with temperature fluctuations, humidity changes, and exposure to UV radiation or chemicals. Developing materials and designs that maintain consistent performance across diverse operating environments represents a significant research challenge.
Standardization and design methodologies are still in nascent stages. Unlike established mechanical or electrical components, soft pneumatic actuators lack standardized design approaches, performance metrics, and testing protocols. This absence of standardization complicates system integration and slows industry-wide adoption, as engineers must often develop custom solutions rather than leveraging established design principles.
Current Soft Pneumatic Actuator Implementations
01 Design and structure of soft pneumatic actuators
Soft pneumatic actuators are designed with flexible materials that deform when pressurized with air. These structures typically include chambers or channels that expand in predetermined directions when inflated, creating controlled movement. The design may incorporate various geometries, reinforcement patterns, and material combinations to achieve specific motion profiles such as bending, twisting, or extending. These structural considerations are fundamental to creating effective soft actuators for various applications.- Design and structure of soft pneumatic actuators: Soft pneumatic actuators are designed with flexible materials that deform when pressurized with air. These structures typically include chambers or channels that expand in predetermined directions when inflated, creating controlled movement. The design may incorporate various geometries, reinforcement patterns, and material combinations to achieve specific motion profiles such as bending, twisting, or extending. These structural considerations are fundamental to creating effective soft actuators for various applications.
- Materials for soft pneumatic actuators: The selection of materials is crucial for soft pneumatic actuators, with elastomers like silicone rubber being commonly used due to their flexibility, durability, and air-tight properties. Some designs incorporate composite structures with varying stiffness to control deformation patterns. Fiber reinforcements or strain-limiting layers may be embedded to constrain expansion in certain directions. Advanced materials with self-healing properties or stimuli-responsive characteristics are also being developed to enhance actuator performance and longevity.
- Control systems for soft pneumatic actuators: Control systems for soft pneumatic actuators typically include pressure regulation mechanisms, valves, sensors, and control algorithms. These systems manage the air flow into and out of the actuator chambers to achieve precise movements. Feedback control using embedded sensors can monitor the actuator's position, pressure, or deformation state. Advanced control strategies may incorporate machine learning or model-based approaches to compensate for the nonlinear behavior of soft materials and improve response accuracy and speed.
- Applications of soft pneumatic actuators in robotics: Soft pneumatic actuators are increasingly used in robotics applications where safe human-robot interaction is required. They enable the development of soft grippers that can handle delicate or irregularly shaped objects without damage. In wearable robotics, they provide assistive forces for rehabilitation or augmentation while conforming to body contours. Soft robots using these actuators can navigate complex environments by deforming around obstacles. Their inherent compliance makes them suitable for medical devices, prosthetics, and applications requiring gentle interaction with the environment.
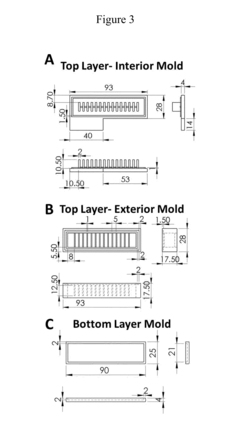
- Manufacturing techniques for soft pneumatic actuators: Manufacturing techniques for soft pneumatic actuators include molding, 3D printing, and layered fabrication methods. Molding processes typically involve creating a negative mold of the desired actuator shape, pouring liquid elastomer, and curing it to form the final structure. Advanced 3D printing methods allow for complex internal channel geometries and multi-material structures. Some manufacturing approaches incorporate embedded components such as sensors or rigid elements during the fabrication process. These techniques aim to improve repeatability, reduce manual assembly steps, and enable mass production of soft actuators.
02 Materials for soft pneumatic actuators
The selection of materials is crucial for soft pneumatic actuator performance. Elastomers like silicone rubber and thermoplastic polyurethanes are commonly used due to their high elasticity, durability, and ability to withstand repeated inflation cycles. Some designs incorporate composite structures with varying material properties in different regions to control deformation patterns. Advanced materials may include self-healing polymers, fiber-reinforced composites, or biomimetic substances that enhance functionality and longevity of the actuators.Expand Specific Solutions03 Control systems for soft pneumatic actuators
Control systems for soft pneumatic actuators typically involve pressure regulation, valve systems, and feedback mechanisms. These systems may use sensors to monitor actuator position, shape, or internal pressure to enable precise control. Advanced control strategies might incorporate machine learning algorithms to adapt to changing conditions or tasks. The integration of electronic components with the pneumatic system allows for automated operation and coordination of multiple actuators in complex systems, enhancing their versatility in various applications.Expand Specific Solutions04 Applications of soft pneumatic actuators in robotics and medical devices
Soft pneumatic actuators are increasingly used in robotics and medical applications due to their inherent safety when interacting with humans. In robotics, they enable the creation of compliant grippers that can handle delicate objects without damage. Medical applications include assistive devices, rehabilitation equipment, and minimally invasive surgical tools. The soft nature of these actuators makes them ideal for wearable technologies that augment human capabilities or provide therapeutic support, offering advantages over traditional rigid actuators in human-centered applications.Expand Specific Solutions05 Manufacturing techniques for soft pneumatic actuators
Manufacturing techniques for soft pneumatic actuators include molding, 3D printing, and layered fabrication methods. Molding processes often involve creating negative molds into which elastomeric materials are poured and cured. Advanced 3D printing enables the creation of complex internal channels and varying material properties within a single structure. Some manufacturing approaches incorporate embedded components such as sensors or rigid elements during the fabrication process. These techniques continue to evolve, allowing for more complex designs, improved performance, and potential for mass production.Expand Specific Solutions
Leading Companies in Soft Robotics Industry
Soft Pneumatic Actuators (SPAs) are emerging as a critical technology in future mobility solutions, with the market currently in its growth phase. The global SPA market is expanding rapidly, driven by applications in robotics, healthcare, and automotive sectors. Technologically, SPAs are advancing from experimental to commercial readiness, with significant research contributions from academic institutions like Harvard College, Zhejiang University, and Tsinghua Shenzhen International Graduate School. Industry players including ZF Friedrichshafen AG, Hyundai Motor Co., and Kia Corp. are actively developing SPA-based mobility solutions, focusing on improved efficiency, reduced weight, and enhanced adaptability. The collaboration between academic research and industrial application is accelerating innovation, positioning SPAs as a transformative technology for next-generation mobility systems.
President & Fellows of Harvard College
Technical Solution: Harvard's Wyss Institute has pioneered soft pneumatic actuators through their groundbreaking work on soft robotics. Their technology utilizes elastomeric materials with embedded pneumatic networks that deform in programmable ways when pressurized with air. The Harvard team has developed a comprehensive platform including fabrication techniques like multi-material 3D printing and molding processes that enable complex actuator geometries. Their soft pneumatic actuators demonstrate remarkable compliance, adaptability, and force-to-weight ratios, making them ideal for human-machine interfaces in mobility applications. Harvard researchers have created biomimetic designs that replicate natural movements, such as their octopus-inspired tentacle actuators and artificial muscle systems that can lift loads hundreds of times their weight while maintaining flexibility. Recent innovations include self-healing materials for actuator longevity and embedded sensing capabilities for closed-loop control systems.
Strengths: Superior biomimetic capabilities allowing natural, compliant motion; extensive intellectual property portfolio; advanced fabrication techniques enabling complex geometries. Weaknesses: Higher production costs compared to traditional actuators; challenges in scaling manufacturing for mass production; potential durability concerns in harsh environmental conditions.
Zhejiang University
Technical Solution: Zhejiang University has developed advanced soft pneumatic actuator technologies through their Soft Robotics Research Center, focusing on mobility applications. Their approach utilizes multi-material composites with geometrically optimized air chambers that provide directional force generation with minimal pressure input. The university's researchers have pioneered fabrication techniques that integrate flexible electronic sensors directly into the actuator structure, enabling real-time deformation feedback and precise control. Their proprietary chamber design achieves amplified displacement through mechanical advantage principles, resulting in greater motion range from compact actuators - a critical feature for space-constrained mobility applications. Zhejiang's technology includes innovative valve miniaturization that reduces the pneumatic control system footprint by approximately 60% compared to conventional systems. Their actuators demonstrate exceptional energy efficiency, operating effectively at pressures below 100 kPa while maintaining force outputs suitable for human-scale applications. Recent developments include self-sensing materials that eliminate the need for external sensors, simplifying system integration and improving reliability.
Strengths: Excellent power-to-weight ratio enabling lightweight mobility solutions; integrated sensing capabilities for precise control; energy-efficient operation at low pressures. Weaknesses: Limited force output for heavy-load applications; potential manufacturing complexity for mass production; durability concerns under repeated high-stress cycling.
Key Patents in Soft Pneumatic Technology
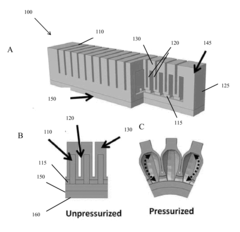
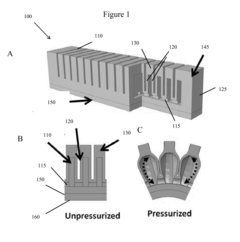
Low strain pneumatic networks for soft robots
PatentActiveUS20150266186A1
Innovation
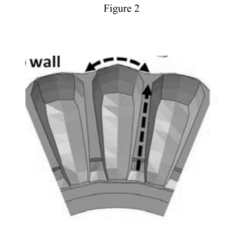
- Design of pneumatic network actuators with freestanding chambers and a strain limiting base, where interior walls are more compliant than exterior walls, reducing strain and energy loss, and allowing for rapid actuation with minimal volume change, enabling high-speed operation and extended cycle life.
Soft actuators and soft actuating devices
PatentWO2016011345A1
Innovation
- The development of soft buckling linear actuators that utilize bucklable, elastic structural components to generate linear forces through fluid inflation or deflation, allowing for parallel actuation and mimicking biological muscle properties without volume expansion, enabling safe and efficient operation in confined spaces.




Material Science Advancements for Soft Actuators
The evolution of soft pneumatic actuators has been significantly propelled by breakthroughs in material science. Traditional rigid actuators constructed from metals and hard plastics are increasingly being replaced by compliant materials that offer superior flexibility and adaptability. Silicone elastomers have emerged as the predominant material choice due to their exceptional elasticity, durability, and biocompatibility. Recent advancements have yielded silicone formulations with enhanced tear resistance and reduced hysteresis, addressing previous limitations in cyclical performance.
Thermoplastic elastomers (TPEs) represent another critical material category, offering the unique advantage of recyclability while maintaining excellent elastic properties. These materials can be processed using conventional plastic manufacturing techniques, enabling more cost-effective mass production of soft actuators. The development of TPEs with variable shore hardness has allowed engineers to create actuators with regionally differentiated stiffness properties, optimizing both flexibility and force output.
Fiber-reinforced composites have revolutionized soft actuator design by enabling anisotropic deformation control. By strategically embedding high-tensile fibers within elastomeric matrices, researchers have created actuators that expand in predetermined directions while restricting unwanted deformation. This advancement has significantly improved force transmission efficiency and movement precision in mobility applications.
Stimuli-responsive materials represent the cutting edge of soft actuator development. These "smart" materials can change their physical properties in response to external stimuli such as temperature, pH, or electric fields. For instance, liquid crystal elastomers (LCEs) can undergo dramatic shape changes when exposed to heat or light, potentially eliminating the need for external pneumatic systems altogether.
Biomimetic materials inspired by natural structures are gaining prominence in soft robotics research. Materials that mimic the variable stiffness properties of octopus tentacles or elephant trunks have been developed, allowing actuators to transition between rigid and compliant states. This capability is particularly valuable for mobility solutions that must navigate varied terrain or interact safely with humans.
Nanomaterial integration has enhanced the functional properties of soft actuators. Carbon nanotubes and graphene incorporated into elastomeric matrices have improved mechanical strength while maintaining flexibility. Additionally, these nanomaterials have introduced novel properties such as electrical conductivity, enabling sensing capabilities to be integrated directly into the actuator structure without additional components.
Thermoplastic elastomers (TPEs) represent another critical material category, offering the unique advantage of recyclability while maintaining excellent elastic properties. These materials can be processed using conventional plastic manufacturing techniques, enabling more cost-effective mass production of soft actuators. The development of TPEs with variable shore hardness has allowed engineers to create actuators with regionally differentiated stiffness properties, optimizing both flexibility and force output.
Fiber-reinforced composites have revolutionized soft actuator design by enabling anisotropic deformation control. By strategically embedding high-tensile fibers within elastomeric matrices, researchers have created actuators that expand in predetermined directions while restricting unwanted deformation. This advancement has significantly improved force transmission efficiency and movement precision in mobility applications.
Stimuli-responsive materials represent the cutting edge of soft actuator development. These "smart" materials can change their physical properties in response to external stimuli such as temperature, pH, or electric fields. For instance, liquid crystal elastomers (LCEs) can undergo dramatic shape changes when exposed to heat or light, potentially eliminating the need for external pneumatic systems altogether.
Biomimetic materials inspired by natural structures are gaining prominence in soft robotics research. Materials that mimic the variable stiffness properties of octopus tentacles or elephant trunks have been developed, allowing actuators to transition between rigid and compliant states. This capability is particularly valuable for mobility solutions that must navigate varied terrain or interact safely with humans.
Nanomaterial integration has enhanced the functional properties of soft actuators. Carbon nanotubes and graphene incorporated into elastomeric matrices have improved mechanical strength while maintaining flexibility. Additionally, these nanomaterials have introduced novel properties such as electrical conductivity, enabling sensing capabilities to be integrated directly into the actuator structure without additional components.
Safety Standards for Human-Robot Interaction
The integration of soft pneumatic actuators into mobility solutions necessitates comprehensive safety standards for human-robot interaction. Current regulatory frameworks, such as ISO/TS 15066 for collaborative robots and ISO 13482 for personal care robots, provide foundational guidelines but require adaptation for soft robotics applications. These standards primarily address rigid robotic systems and lack specific provisions for the unique characteristics of soft pneumatic actuators.
Safety certification for soft pneumatic mobility solutions must consider their inherent compliance and variable stiffness properties. Unlike traditional rigid robots, soft actuators distribute force over larger contact areas, potentially reducing impact hazards. However, this requires new testing methodologies to accurately assess safety parameters such as maximum pressure, deformation limits, and failure modes specific to pneumatic systems.
Risk assessment protocols for human-robot interaction with soft pneumatic actuators should incorporate both physical and psychological safety considerations. Physical safety metrics must evaluate contact scenarios, including intentional interaction and accidental collisions, with particular attention to the non-linear force response characteristics of pneumatic systems. Psychological safety standards should address user comfort with these novel mobility interfaces, as their dynamic morphing capabilities may create unfamiliar interaction experiences.
Real-time safety monitoring presents unique challenges for soft pneumatic systems. Traditional position and force sensors often prove inadequate for monitoring the complex deformations of soft actuators. Emerging standards should specify appropriate sensing technologies, such as distributed pressure sensors, stretchable electronics, and computer vision systems, to ensure reliable safety monitoring during human-robot interaction.
Fail-safe mechanisms represent a critical component of safety standards for pneumatic mobility solutions. Standards must define requirements for pressure relief systems, emergency depressurization protocols, and redundant control architectures. Unlike electromechanical systems, pneumatic actuators present distinct failure modes related to air leakage, material fatigue, and pressure regulation that require specialized safety countermeasures.
Testing and validation procedures for soft pneumatic mobility solutions should incorporate accelerated aging tests to evaluate material degradation, cyclic loading tests to assess fatigue resistance, and environmental testing to ensure performance across temperature and humidity ranges. These procedures must be standardized to enable consistent safety certification across different applications and regulatory jurisdictions.
Human factors engineering standards should address the unique interaction modalities of soft pneumatic systems, including guidelines for intuitive control interfaces, appropriate feedback mechanisms, and clear indication of system states. These standards must balance technological innovation with user safety, particularly for mobility applications where user trust and system reliability are paramount.
Safety certification for soft pneumatic mobility solutions must consider their inherent compliance and variable stiffness properties. Unlike traditional rigid robots, soft actuators distribute force over larger contact areas, potentially reducing impact hazards. However, this requires new testing methodologies to accurately assess safety parameters such as maximum pressure, deformation limits, and failure modes specific to pneumatic systems.
Risk assessment protocols for human-robot interaction with soft pneumatic actuators should incorporate both physical and psychological safety considerations. Physical safety metrics must evaluate contact scenarios, including intentional interaction and accidental collisions, with particular attention to the non-linear force response characteristics of pneumatic systems. Psychological safety standards should address user comfort with these novel mobility interfaces, as their dynamic morphing capabilities may create unfamiliar interaction experiences.
Real-time safety monitoring presents unique challenges for soft pneumatic systems. Traditional position and force sensors often prove inadequate for monitoring the complex deformations of soft actuators. Emerging standards should specify appropriate sensing technologies, such as distributed pressure sensors, stretchable electronics, and computer vision systems, to ensure reliable safety monitoring during human-robot interaction.
Fail-safe mechanisms represent a critical component of safety standards for pneumatic mobility solutions. Standards must define requirements for pressure relief systems, emergency depressurization protocols, and redundant control architectures. Unlike electromechanical systems, pneumatic actuators present distinct failure modes related to air leakage, material fatigue, and pressure regulation that require specialized safety countermeasures.
Testing and validation procedures for soft pneumatic mobility solutions should incorporate accelerated aging tests to evaluate material degradation, cyclic loading tests to assess fatigue resistance, and environmental testing to ensure performance across temperature and humidity ranges. These procedures must be standardized to enable consistent safety certification across different applications and regulatory jurisdictions.
Human factors engineering standards should address the unique interaction modalities of soft pneumatic systems, including guidelines for intuitive control interfaces, appropriate feedback mechanisms, and clear indication of system states. These standards must balance technological innovation with user safety, particularly for mobility applications where user trust and system reliability are paramount.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!