Assess Interoperability in Multi-Vendor Mobile Manipulation Systems
APR 24, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Multi-Vendor Mobile Manipulation Background and Objectives
Multi-vendor mobile manipulation systems represent a convergence of robotics, artificial intelligence, and industrial automation technologies that has evolved significantly over the past two decades. The foundational development began with standalone robotic arms in manufacturing environments during the 1980s and 1990s, which gradually integrated with mobile platforms to create autonomous mobile manipulation capabilities. The emergence of standardized communication protocols, advanced sensor fusion technologies, and cloud-based coordination systems has enabled the integration of components from different manufacturers into cohesive operational units.
The technological evolution has been driven by the increasing complexity of modern industrial and service applications, where single-vendor solutions often fail to meet diverse operational requirements. Early systems were predominantly proprietary, limiting flexibility and scalability. However, the introduction of open-source robotics frameworks like ROS (Robot Operating System) and the development of industry standards such as OPC-UA and IEEE 802.11 wireless protocols have facilitated cross-vendor compatibility and system integration.
Current technological trends indicate a shift toward modular, plug-and-play architectures that enable seamless integration of heterogeneous components including manipulator arms, mobile bases, sensors, and control systems from different manufacturers. The integration of artificial intelligence and machine learning algorithms has further enhanced the adaptability and performance of these multi-vendor systems, enabling real-time optimization and autonomous decision-making capabilities.
The primary technical objectives focus on achieving seamless interoperability between diverse hardware and software components while maintaining system reliability, safety, and performance standards. Key goals include establishing standardized communication interfaces, developing robust middleware solutions for real-time coordination, and implementing comprehensive testing frameworks for multi-vendor system validation.
Strategic objectives encompass reducing total cost of ownership through vendor diversification, enhancing system flexibility and customization capabilities, and accelerating innovation cycles by leveraging best-in-class components from multiple suppliers. The ultimate goal is to create scalable, adaptable mobile manipulation systems that can efficiently operate across various industrial sectors including manufacturing, logistics, healthcare, and service robotics while maintaining high levels of safety, reliability, and operational efficiency.
The technological evolution has been driven by the increasing complexity of modern industrial and service applications, where single-vendor solutions often fail to meet diverse operational requirements. Early systems were predominantly proprietary, limiting flexibility and scalability. However, the introduction of open-source robotics frameworks like ROS (Robot Operating System) and the development of industry standards such as OPC-UA and IEEE 802.11 wireless protocols have facilitated cross-vendor compatibility and system integration.
Current technological trends indicate a shift toward modular, plug-and-play architectures that enable seamless integration of heterogeneous components including manipulator arms, mobile bases, sensors, and control systems from different manufacturers. The integration of artificial intelligence and machine learning algorithms has further enhanced the adaptability and performance of these multi-vendor systems, enabling real-time optimization and autonomous decision-making capabilities.
The primary technical objectives focus on achieving seamless interoperability between diverse hardware and software components while maintaining system reliability, safety, and performance standards. Key goals include establishing standardized communication interfaces, developing robust middleware solutions for real-time coordination, and implementing comprehensive testing frameworks for multi-vendor system validation.
Strategic objectives encompass reducing total cost of ownership through vendor diversification, enhancing system flexibility and customization capabilities, and accelerating innovation cycles by leveraging best-in-class components from multiple suppliers. The ultimate goal is to create scalable, adaptable mobile manipulation systems that can efficiently operate across various industrial sectors including manufacturing, logistics, healthcare, and service robotics while maintaining high levels of safety, reliability, and operational efficiency.
Market Demand for Interoperable Mobile Manipulation Systems
The global robotics market is experiencing unprecedented growth, with mobile manipulation systems emerging as a critical component across multiple industries. Manufacturing facilities increasingly require flexible automation solutions that can adapt to changing production demands while maintaining operational efficiency. The automotive sector, in particular, has demonstrated substantial appetite for mobile manipulators capable of performing assembly, welding, and quality inspection tasks across different production lines.
Warehouse and logistics operations represent another significant demand driver, where companies seek integrated solutions combining autonomous mobile robots with sophisticated manipulation capabilities. E-commerce growth has intensified the need for systems that can handle diverse package sizes, weights, and materials while operating seamlessly within existing infrastructure. The ability to deploy equipment from multiple vendors while maintaining unified control systems has become a competitive necessity.
Healthcare facilities are increasingly adopting mobile manipulation systems for medication delivery, patient assistance, and laboratory automation. The sector's stringent regulatory requirements and diverse equipment ecosystems create strong demand for interoperable solutions that can integrate with existing medical devices and information systems without compromising safety or compliance standards.
The construction and infrastructure sectors show growing interest in mobile manipulation systems for tasks ranging from material handling to precision assembly. These environments typically involve equipment from multiple manufacturers, making interoperability essential for project success and cost optimization. Companies are actively seeking solutions that can work alongside existing machinery while providing enhanced automation capabilities.
Agricultural applications present emerging opportunities, with farms requiring mobile systems capable of harvesting, sorting, and packaging operations. The seasonal nature of agricultural work and the need to integrate with various specialized equipment create demand for flexible, interoperable platforms that can adapt to different crops and farming practices.
Service industries, including hospitality and retail, are exploring mobile manipulation systems for customer service, inventory management, and facility maintenance. These sectors require solutions that can operate safely in human-populated environments while interfacing with diverse point-of-sale systems, inventory databases, and facility management platforms.
The defense and security sectors continue to drive demand for mobile manipulation systems capable of explosive ordnance disposal, surveillance, and logistics support. Military applications particularly value interoperability due to the multi-vendor nature of defense procurement and the need for systems to operate across different platforms and command structures.
Warehouse and logistics operations represent another significant demand driver, where companies seek integrated solutions combining autonomous mobile robots with sophisticated manipulation capabilities. E-commerce growth has intensified the need for systems that can handle diverse package sizes, weights, and materials while operating seamlessly within existing infrastructure. The ability to deploy equipment from multiple vendors while maintaining unified control systems has become a competitive necessity.
Healthcare facilities are increasingly adopting mobile manipulation systems for medication delivery, patient assistance, and laboratory automation. The sector's stringent regulatory requirements and diverse equipment ecosystems create strong demand for interoperable solutions that can integrate with existing medical devices and information systems without compromising safety or compliance standards.
The construction and infrastructure sectors show growing interest in mobile manipulation systems for tasks ranging from material handling to precision assembly. These environments typically involve equipment from multiple manufacturers, making interoperability essential for project success and cost optimization. Companies are actively seeking solutions that can work alongside existing machinery while providing enhanced automation capabilities.
Agricultural applications present emerging opportunities, with farms requiring mobile systems capable of harvesting, sorting, and packaging operations. The seasonal nature of agricultural work and the need to integrate with various specialized equipment create demand for flexible, interoperable platforms that can adapt to different crops and farming practices.
Service industries, including hospitality and retail, are exploring mobile manipulation systems for customer service, inventory management, and facility maintenance. These sectors require solutions that can operate safely in human-populated environments while interfacing with diverse point-of-sale systems, inventory databases, and facility management platforms.
The defense and security sectors continue to drive demand for mobile manipulation systems capable of explosive ordnance disposal, surveillance, and logistics support. Military applications particularly value interoperability due to the multi-vendor nature of defense procurement and the need for systems to operate across different platforms and command structures.
Current Interoperability Challenges in Multi-Vendor Robotics
Multi-vendor mobile manipulation systems face significant interoperability challenges that stem from the fundamental lack of standardized communication protocols across different robotic platforms. Each manufacturer typically develops proprietary software architectures, hardware interfaces, and control systems that are optimized for their specific products but create barriers when attempting to integrate with third-party components. This fragmentation results in complex integration processes that require extensive custom development work and specialized expertise.
Communication protocol incompatibility represents one of the most critical technical barriers. Different vendors implement varying message formats, data structures, and timing requirements for robot-to-robot communication and coordination. While ROS (Robot Operating System) has emerged as a common framework, vendors often customize their implementations or use entirely different middleware solutions, creating compatibility gaps that prevent seamless information exchange between heterogeneous robotic systems.
Hardware interface standardization remains another significant challenge, particularly in mobile manipulation applications where robots must interact with diverse end-effectors, sensors, and environmental systems. Mechanical coupling mechanisms, electrical connections, and sensor integration protocols vary substantially across manufacturers, limiting the ability to create truly modular and interchangeable robotic components.
Software architecture differences compound these hardware challenges, as each vendor typically employs distinct programming paradigms, real-time operating systems, and control algorithms. These variations affect everything from motion planning and trajectory execution to safety monitoring and fault handling, making it difficult to achieve consistent behavior across multi-vendor deployments.
Safety and security considerations add additional complexity layers, as different manufacturers implement varying safety standards, certification requirements, and cybersecurity measures. Ensuring consistent safety performance and maintaining security integrity across heterogeneous systems requires careful coordination and often results in adopting the most restrictive common denominator approach.
The absence of comprehensive industry-wide standards for semantic interoperability further complicates system integration. Different vendors use varying ontologies, data models, and task description languages, making it challenging for robots from different manufacturers to understand shared objectives and coordinate complex manipulation tasks effectively.
Communication protocol incompatibility represents one of the most critical technical barriers. Different vendors implement varying message formats, data structures, and timing requirements for robot-to-robot communication and coordination. While ROS (Robot Operating System) has emerged as a common framework, vendors often customize their implementations or use entirely different middleware solutions, creating compatibility gaps that prevent seamless information exchange between heterogeneous robotic systems.
Hardware interface standardization remains another significant challenge, particularly in mobile manipulation applications where robots must interact with diverse end-effectors, sensors, and environmental systems. Mechanical coupling mechanisms, electrical connections, and sensor integration protocols vary substantially across manufacturers, limiting the ability to create truly modular and interchangeable robotic components.
Software architecture differences compound these hardware challenges, as each vendor typically employs distinct programming paradigms, real-time operating systems, and control algorithms. These variations affect everything from motion planning and trajectory execution to safety monitoring and fault handling, making it difficult to achieve consistent behavior across multi-vendor deployments.
Safety and security considerations add additional complexity layers, as different manufacturers implement varying safety standards, certification requirements, and cybersecurity measures. Ensuring consistent safety performance and maintaining security integrity across heterogeneous systems requires careful coordination and often results in adopting the most restrictive common denominator approach.
The absence of comprehensive industry-wide standards for semantic interoperability further complicates system integration. Different vendors use varying ontologies, data models, and task description languages, making it challenging for robots from different manufacturers to understand shared objectives and coordinate complex manipulation tasks effectively.
Existing Interoperability Solutions for Multi-Vendor Systems
01 Standardized communication protocols for multi-vendor system integration
Implementation of standardized communication protocols and interfaces enables seamless data exchange between mobile manipulation systems from different vendors. These protocols define common message formats, command structures, and data representations that allow heterogeneous systems to communicate effectively. The standardization approach facilitates plug-and-play integration and reduces the complexity of coordinating multiple vendor platforms in collaborative tasks.- Standardized communication protocols for multi-vendor system integration: Implementation of standardized communication protocols and interfaces enables seamless data exchange between mobile manipulation systems from different vendors. These protocols define common message formats, command structures, and data representations that allow heterogeneous systems to communicate effectively. The standardization approach facilitates plug-and-play integration and reduces the complexity of coordinating multiple vendor platforms in collaborative tasks.
- Middleware architecture for vendor-agnostic system coordination: A middleware layer serves as an abstraction interface that translates vendor-specific commands and data formats into a unified representation. This architecture enables different mobile manipulation systems to work together without requiring modifications to their native control systems. The middleware handles protocol conversion, message routing, and synchronization between disparate platforms, providing a vendor-neutral coordination framework.
- Modular hardware interfaces for cross-platform compatibility: Modular hardware interface designs allow mobile manipulation systems from different manufacturers to physically connect and exchange mechanical power or signals. These interfaces include standardized mounting points, electrical connectors, and mechanical couplings that enable interchangeable components and end-effectors across vendor platforms. The modular approach supports flexible system reconfiguration and component sharing in multi-vendor environments.
- Distributed control systems for collaborative multi-robot operations: Distributed control architectures enable multiple mobile manipulation systems to coordinate their actions through decentralized decision-making and task allocation. Each system maintains local autonomy while participating in global coordination through shared state information and negotiation protocols. This approach allows robots from different vendors to collaborate on complex tasks without requiring a centralized controller that understands all vendor-specific implementations.
- Universal programming interfaces and skill libraries: Universal programming interfaces provide a common software framework for defining and executing manipulation tasks across different vendor platforms. These interfaces include standardized skill libraries, motion primitives, and task descriptions that can be interpreted by various mobile manipulation systems. The approach enables operators to program multi-vendor systems using a single programming paradigm, reducing training requirements and facilitating system interoperability.
02 Middleware architecture for vendor-agnostic system coordination
A middleware layer serves as an abstraction interface that translates between different vendor-specific control systems and provides unified access to mobile manipulation capabilities. This architecture decouples application logic from hardware-specific implementations, allowing operators to control diverse robotic systems through a common interface. The middleware handles protocol conversion, command mapping, and state synchronization across heterogeneous platforms.Expand Specific Solutions03 Distributed task allocation and coordination mechanisms
Advanced algorithms enable dynamic task distribution and coordination among mobile manipulation systems from multiple vendors operating in shared workspaces. These mechanisms consider system capabilities, current states, and task requirements to optimize resource allocation and prevent conflicts. The coordination framework supports real-time replanning and load balancing to maintain operational efficiency when systems from different manufacturers collaborate on complex manipulation tasks.Expand Specific Solutions04 Common data models and semantic interoperability frameworks
Establishing shared data models and ontologies enables semantic interoperability between mobile manipulation systems with different internal representations. These frameworks define common vocabularies for describing objects, environments, tasks, and system states, allowing vendors' systems to interpret and exchange information meaningfully. Semantic mapping techniques bridge differences in how various platforms represent and process manipulation-related data.Expand Specific Solutions05 Safety and collision avoidance in multi-vendor environments
Integrated safety systems ensure collision-free operation when mobile manipulation platforms from different vendors share workspace. These systems implement cross-vendor motion coordination, shared safety zones, and emergency stop protocols that work regardless of manufacturer-specific control architectures. The safety framework monitors all active systems and enforces constraints to prevent interference while maintaining operational flexibility for collaborative manipulation tasks.Expand Specific Solutions
Key Players in Mobile Manipulation and Integration Platforms
The multi-vendor mobile manipulation systems market is experiencing rapid growth as the industry transitions from early adoption to mainstream deployment across manufacturing, logistics, and service sectors. Market expansion is driven by increasing demand for flexible automation solutions that can integrate diverse robotic platforms from multiple vendors. Technology maturity varies significantly among key players, with established robotics companies like Boston Dynamics and KUKA Deutschland leading in advanced manipulation capabilities, while technology giants such as Samsung Electronics, Huawei Technologies, and Apple drive innovation in mobile platforms and connectivity standards. Academic institutions including Northwestern Polytechnical University and Indian Institute of Technology Madras contribute foundational research, while companies like Intuitive Surgical Operations advance specialized applications. The competitive landscape reflects a convergence of robotics expertise, telecommunications infrastructure, and AI capabilities, with interoperability challenges creating both barriers and opportunities for standardization initiatives.
Huawei Technologies Co., Ltd.
Technical Solution: Huawei has developed mobile manipulation solutions leveraging their expertise in telecommunications and AI technologies. Their approach integrates 5G connectivity, edge computing, and AI processing to enable distributed mobile manipulation systems. The platform utilizes standardized communication protocols and open-source frameworks to facilitate multi-vendor integration. Huawei's system architecture emphasizes cloud-edge collaboration, enabling real-time coordination between multiple robotic systems and various third-party components. Their solution supports integration with diverse sensors, actuators, and control systems through standardized APIs, while leveraging their telecommunications infrastructure expertise to ensure reliable communication in complex multi-vendor environments.
Strengths: Advanced connectivity and communication capabilities, strong AI and cloud computing integration, extensive telecommunications infrastructure expertise. Weaknesses: Limited robotics hardware experience, potential concerns regarding data security and vendor lock-in in certain markets.
KUKA Deutschland GmbH
Technical Solution: KUKA has developed comprehensive mobile manipulation solutions through their KMR (KUKA Mobile Robotics) platform, which integrates industrial robotic arms with autonomous mobile platforms. Their system architecture emphasizes standardized communication protocols including ROS compatibility and industrial Ethernet standards. The platform supports multi-vendor integration through open interfaces and standardized APIs, enabling seamless coordination with various sensors, vision systems, and control architectures from different manufacturers. KUKA's approach prioritizes industrial-grade reliability and safety standards while maintaining flexibility for diverse application requirements in manufacturing and logistics environments.
Strengths: Industrial-grade reliability, extensive ROS ecosystem support, proven manufacturing integration experience. Weaknesses: Higher complexity in setup and configuration, primarily focused on industrial applications limiting general-purpose flexibility.
Core Technologies for Cross-Platform Mobile Manipulation
Interoperation middleware testing system and method for heterogeneous mobile robots
PatentInactiveCN111993424A
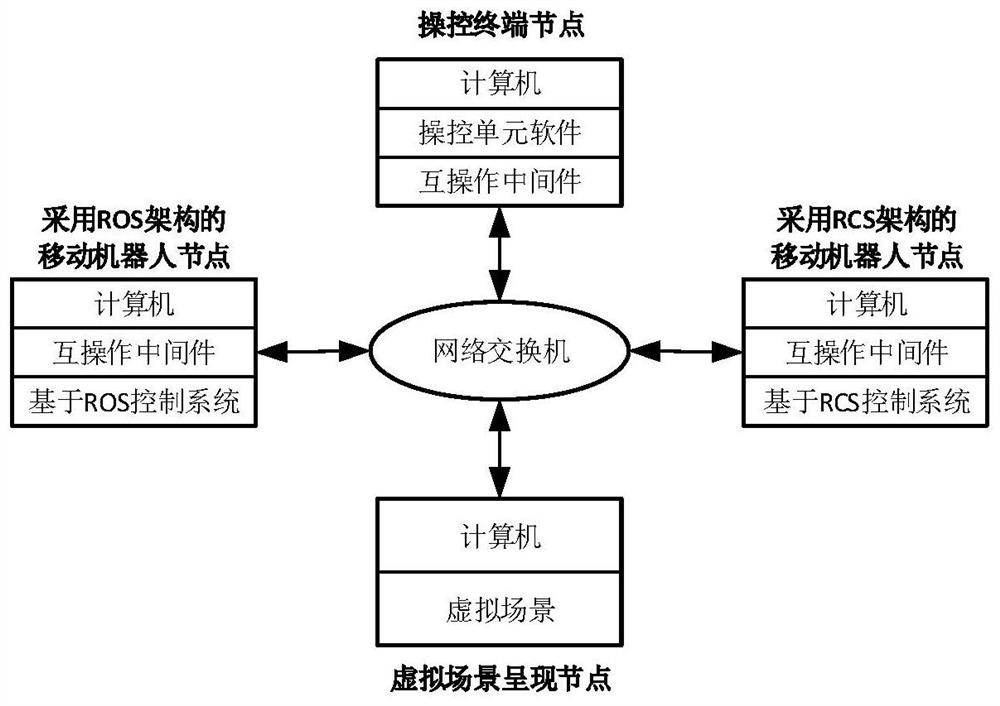
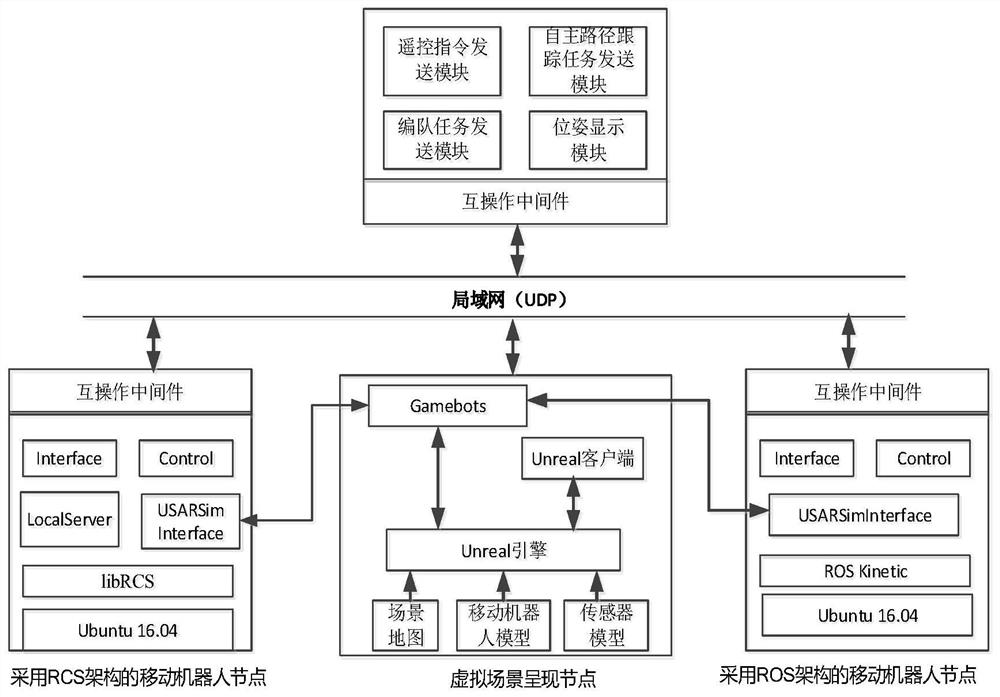
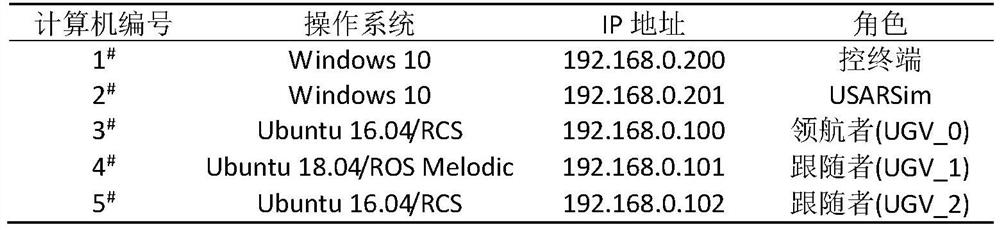
Innovation
- An interoperable middleware test system for heterogeneous mobile robots is designed, including control terminals, mobile robot nodes of multiple architectures, and virtual scene presentation nodes. It supports information interaction through network communication, and uses RCS and ROS architecture nodes to construct control systems respectively. system, utilizing interoperability middleware for task-driven testing and evaluation.
Universal smart device
PatentActiveUS20180213380A1
Innovation
- A universal smart instrumentation system utilizing a smartphone or tablet as a computing device with sensor modules and wireless communication, along with software applications that recognize and configure probes for data acquisition and display, enabling interoperability and scalability without the need for extensive hardware redesign.




Standardization and Certification Requirements
The standardization landscape for multi-vendor mobile manipulation systems is currently fragmented, with multiple organizations developing overlapping yet incompatible frameworks. The IEEE Robotics and Automation Society has established IEEE 1872 standards for robot ontology, while the Object Management Group maintains the Robotic Technology Component specification. However, these standards primarily address software interfaces rather than comprehensive interoperability requirements for mobile manipulation platforms.
Current certification processes lack unified protocols for validating cross-vendor compatibility in mobile manipulation systems. The International Organization for Standardization has initiated ISO 13482 for personal care robots, but this framework inadequately addresses the complex interaction requirements between mobile bases and manipulation arms from different manufacturers. The absence of standardized testing procedures creates significant barriers for system integrators attempting to combine components from multiple vendors.
Emerging standardization efforts focus on establishing common communication protocols and safety requirements. The Industrial Internet Consortium is developing reference architectures that emphasize secure data exchange between heterogeneous robotic components. These initiatives aim to create vendor-neutral interfaces that enable seamless integration while maintaining system reliability and safety standards.
Certification requirements must evolve to encompass both individual component validation and system-level interoperability assessment. Future frameworks should mandate compatibility testing across different vendor combinations, establishing baseline performance metrics for integrated mobile manipulation systems. This approach would require certified components to demonstrate successful operation within predefined multi-vendor configurations.
The development of comprehensive certification programs necessitates collaboration between industry leaders, standards organizations, and regulatory bodies. These programs must address technical specifications, safety protocols, and performance benchmarks while accommodating rapid technological advancement. Establishing clear certification pathways will accelerate market adoption and reduce integration risks for end users seeking multi-vendor solutions.
Current certification processes lack unified protocols for validating cross-vendor compatibility in mobile manipulation systems. The International Organization for Standardization has initiated ISO 13482 for personal care robots, but this framework inadequately addresses the complex interaction requirements between mobile bases and manipulation arms from different manufacturers. The absence of standardized testing procedures creates significant barriers for system integrators attempting to combine components from multiple vendors.
Emerging standardization efforts focus on establishing common communication protocols and safety requirements. The Industrial Internet Consortium is developing reference architectures that emphasize secure data exchange between heterogeneous robotic components. These initiatives aim to create vendor-neutral interfaces that enable seamless integration while maintaining system reliability and safety standards.
Certification requirements must evolve to encompass both individual component validation and system-level interoperability assessment. Future frameworks should mandate compatibility testing across different vendor combinations, establishing baseline performance metrics for integrated mobile manipulation systems. This approach would require certified components to demonstrate successful operation within predefined multi-vendor configurations.
The development of comprehensive certification programs necessitates collaboration between industry leaders, standards organizations, and regulatory bodies. These programs must address technical specifications, safety protocols, and performance benchmarks while accommodating rapid technological advancement. Establishing clear certification pathways will accelerate market adoption and reduce integration risks for end users seeking multi-vendor solutions.
Safety and Security Considerations in Multi-Vendor Systems
Safety and security considerations represent critical challenges in multi-vendor mobile manipulation systems, where diverse hardware and software components from different manufacturers must operate cohesively. The heterogeneous nature of these systems introduces multiple attack vectors and failure modes that require comprehensive risk assessment and mitigation strategies.
Authentication and authorization mechanisms become particularly complex when multiple vendors' systems must establish trust relationships. Each vendor typically implements proprietary security protocols, creating potential vulnerabilities at integration points. Standardized authentication frameworks, such as OAuth 2.0 and certificate-based systems, are essential for establishing secure communication channels between disparate components while maintaining vendor-specific security requirements.
Data integrity and confidentiality pose significant challenges as sensitive information flows between different vendor systems. Encryption protocols must be harmonized across platforms, requiring careful consideration of key management, data classification, and access control policies. The implementation of end-to-end encryption becomes crucial when robotic systems handle sensitive operational data or interact with critical infrastructure components.
Cybersecurity threats in multi-vendor environments are amplified by the expanded attack surface created through numerous integration points. Each vendor's security update cycles, vulnerability disclosure practices, and patch management procedures may differ significantly, creating temporal security gaps. Coordinated vulnerability management becomes essential to ensure that security patches are applied consistently across all system components without disrupting operational continuity.
Safety considerations extend beyond traditional robotic safety protocols to encompass system-wide failure scenarios. When components from different vendors fail or behave unexpectedly, the system must maintain safe operational states. This requires implementing robust fault detection, isolation, and recovery mechanisms that can handle vendor-specific failure modes while ensuring human safety and equipment protection.
Compliance with industry safety standards, such as ISO 10218 for industrial robots and IEC 61508 for functional safety, becomes more complex in multi-vendor systems. Each vendor's compliance certifications must be validated within the integrated system context, requiring comprehensive safety assessments that consider inter-vendor dependencies and potential cascading failure scenarios.
Authentication and authorization mechanisms become particularly complex when multiple vendors' systems must establish trust relationships. Each vendor typically implements proprietary security protocols, creating potential vulnerabilities at integration points. Standardized authentication frameworks, such as OAuth 2.0 and certificate-based systems, are essential for establishing secure communication channels between disparate components while maintaining vendor-specific security requirements.
Data integrity and confidentiality pose significant challenges as sensitive information flows between different vendor systems. Encryption protocols must be harmonized across platforms, requiring careful consideration of key management, data classification, and access control policies. The implementation of end-to-end encryption becomes crucial when robotic systems handle sensitive operational data or interact with critical infrastructure components.
Cybersecurity threats in multi-vendor environments are amplified by the expanded attack surface created through numerous integration points. Each vendor's security update cycles, vulnerability disclosure practices, and patch management procedures may differ significantly, creating temporal security gaps. Coordinated vulnerability management becomes essential to ensure that security patches are applied consistently across all system components without disrupting operational continuity.
Safety considerations extend beyond traditional robotic safety protocols to encompass system-wide failure scenarios. When components from different vendors fail or behave unexpectedly, the system must maintain safe operational states. This requires implementing robust fault detection, isolation, and recovery mechanisms that can handle vendor-specific failure modes while ensuring human safety and equipment protection.
Compliance with industry safety standards, such as ISO 10218 for industrial robots and IEC 61508 for functional safety, becomes more complex in multi-vendor systems. Each vendor's compliance certifications must be validated within the integrated system context, requiring comprehensive safety assessments that consider inter-vendor dependencies and potential cascading failure scenarios.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!