

Assess software frameworks for mobile robot control systems
APR 24, 20268 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Mobile Robot Control Framework Background and Objectives
Mobile robotics has emerged as one of the most transformative technologies of the 21st century, fundamentally reshaping industries ranging from manufacturing and logistics to healthcare and defense. The evolution of mobile robot control systems has progressed from simple remote-controlled devices to sophisticated autonomous platforms capable of complex decision-making and adaptive behavior in dynamic environments.
The historical development of mobile robot control frameworks can be traced back to the 1960s with early industrial automation systems, evolving through reactive control architectures in the 1980s, behavior-based robotics in the 1990s, and culminating in today's AI-driven autonomous systems. This progression reflects the continuous advancement in computational power, sensor technologies, and algorithmic sophistication that has enabled increasingly complex robotic behaviors.
Current technological trends indicate a shift toward distributed control architectures, real-time processing capabilities, and seamless integration with cloud computing and edge computing paradigms. The integration of machine learning algorithms, particularly deep learning and reinforcement learning, has become a cornerstone of modern mobile robot control systems, enabling adaptive behavior and improved performance in unstructured environments.
The primary technical objectives driving current research and development efforts focus on achieving robust real-time performance, ensuring system reliability and safety, and enabling seamless scalability across diverse robotic platforms. These objectives encompass the development of standardized communication protocols, modular software architectures, and hardware-agnostic control frameworks that can accommodate various sensor configurations and actuator systems.
Furthermore, the pursuit of interoperability between different robotic systems and the establishment of common development standards represent critical goals for the industry. The emphasis on reducing development time and costs while maintaining high performance standards has led to increased focus on reusable software components and standardized middleware solutions that can accelerate the deployment of mobile robotic applications across multiple domains.
The historical development of mobile robot control frameworks can be traced back to the 1960s with early industrial automation systems, evolving through reactive control architectures in the 1980s, behavior-based robotics in the 1990s, and culminating in today's AI-driven autonomous systems. This progression reflects the continuous advancement in computational power, sensor technologies, and algorithmic sophistication that has enabled increasingly complex robotic behaviors.
Current technological trends indicate a shift toward distributed control architectures, real-time processing capabilities, and seamless integration with cloud computing and edge computing paradigms. The integration of machine learning algorithms, particularly deep learning and reinforcement learning, has become a cornerstone of modern mobile robot control systems, enabling adaptive behavior and improved performance in unstructured environments.
The primary technical objectives driving current research and development efforts focus on achieving robust real-time performance, ensuring system reliability and safety, and enabling seamless scalability across diverse robotic platforms. These objectives encompass the development of standardized communication protocols, modular software architectures, and hardware-agnostic control frameworks that can accommodate various sensor configurations and actuator systems.
Furthermore, the pursuit of interoperability between different robotic systems and the establishment of common development standards represent critical goals for the industry. The emphasis on reducing development time and costs while maintaining high performance standards has led to increased focus on reusable software components and standardized middleware solutions that can accelerate the deployment of mobile robotic applications across multiple domains.
Market Demand for Mobile Robot Control Solutions
The global mobile robot control solutions market is experiencing unprecedented growth driven by accelerating automation trends across multiple industries. Manufacturing sectors are increasingly adopting autonomous mobile robots for material handling, inventory management, and production line optimization. Warehousing and logistics operations represent the largest demand segment, where companies seek to reduce labor costs while improving operational efficiency and accuracy in order fulfillment processes.
Healthcare facilities are emerging as a significant growth driver, particularly following the pandemic's emphasis on contactless operations. Hospitals and medical centers are deploying mobile robots for medication delivery, patient monitoring, disinfection tasks, and supply chain management. The aging population in developed countries further amplifies demand for assistive robotics in eldercare facilities and home healthcare applications.
Service robotics markets are expanding rapidly in retail, hospitality, and commercial cleaning sectors. Retail chains are implementing mobile robots for inventory tracking, customer assistance, and store maintenance. Hotels and restaurants are adopting service robots for food delivery, cleaning, and guest interaction, driven by labor shortages and changing consumer expectations for technology-enhanced experiences.
Agricultural automation presents substantial untapped potential, with precision farming techniques requiring sophisticated mobile platforms for crop monitoring, harvesting, and field maintenance. Environmental monitoring and security applications are also gaining traction, particularly for perimeter surveillance, hazardous area inspection, and disaster response scenarios.
The defense and aerospace sectors maintain steady demand for specialized mobile robot platforms requiring robust, real-time control systems capable of operating in challenging environments. These applications often drive innovation in control software frameworks due to their stringent reliability and performance requirements.
Emerging markets in Asia-Pacific and Latin America are experiencing rapid adoption as manufacturing costs decrease and local automation initiatives gain momentum. Small and medium enterprises are increasingly considering mobile robotics solutions as software frameworks become more accessible and deployment complexity reduces through standardized platforms and cloud-based management systems.
Healthcare facilities are emerging as a significant growth driver, particularly following the pandemic's emphasis on contactless operations. Hospitals and medical centers are deploying mobile robots for medication delivery, patient monitoring, disinfection tasks, and supply chain management. The aging population in developed countries further amplifies demand for assistive robotics in eldercare facilities and home healthcare applications.
Service robotics markets are expanding rapidly in retail, hospitality, and commercial cleaning sectors. Retail chains are implementing mobile robots for inventory tracking, customer assistance, and store maintenance. Hotels and restaurants are adopting service robots for food delivery, cleaning, and guest interaction, driven by labor shortages and changing consumer expectations for technology-enhanced experiences.
Agricultural automation presents substantial untapped potential, with precision farming techniques requiring sophisticated mobile platforms for crop monitoring, harvesting, and field maintenance. Environmental monitoring and security applications are also gaining traction, particularly for perimeter surveillance, hazardous area inspection, and disaster response scenarios.
The defense and aerospace sectors maintain steady demand for specialized mobile robot platforms requiring robust, real-time control systems capable of operating in challenging environments. These applications often drive innovation in control software frameworks due to their stringent reliability and performance requirements.
Emerging markets in Asia-Pacific and Latin America are experiencing rapid adoption as manufacturing costs decrease and local automation initiatives gain momentum. Small and medium enterprises are increasingly considering mobile robotics solutions as software frameworks become more accessible and deployment complexity reduces through standardized platforms and cloud-based management systems.
Current State and Challenges of Robot Control Frameworks
The current landscape of robot control frameworks presents a complex ecosystem of diverse solutions, each addressing specific aspects of mobile robot development and deployment. Established frameworks like ROS (Robot Operating System) and ROS 2 dominate the academic and research sectors, providing comprehensive middleware solutions with extensive community support and modular architectures. These frameworks offer standardized communication protocols, hardware abstraction layers, and rich toolsets for simulation and debugging.
Industrial applications have gravitated toward proprietary solutions and specialized frameworks such as YARP (Yet Another Robot Platform), OpenRAVE, and commercial platforms like ABB RobotStudio and KUKA.Sim. These systems prioritize real-time performance, safety compliance, and integration with existing manufacturing infrastructure. The fragmentation between research-oriented and industrial frameworks creates significant barriers for technology transfer and scalability.
Emerging cloud-based robotics platforms, including AWS RoboMaker and Google Cloud Robotics, represent a paradigm shift toward distributed computing architectures. These solutions leverage cloud resources for computationally intensive tasks while maintaining local control loops for real-time operations. However, latency concerns and connectivity dependencies remain significant limitations for mission-critical applications.
The integration of artificial intelligence and machine learning capabilities poses substantial challenges for existing frameworks. Traditional control architectures struggle to accommodate the computational requirements and data flow patterns of modern AI algorithms. This has led to the development of hybrid solutions that combine classical control theory with neural network-based approaches, creating complexity in system design and validation.
Real-time performance requirements continue to challenge framework developers, particularly in safety-critical applications. Many existing solutions lack deterministic behavior guarantees, making them unsuitable for applications requiring precise timing constraints. The trade-off between flexibility and real-time performance remains a fundamental design challenge across all framework categories.
Interoperability between different frameworks and hardware platforms represents another critical challenge. The lack of standardized interfaces and communication protocols hinders system integration and increases development costs. This fragmentation forces developers to make early architectural decisions that can significantly impact long-term scalability and maintainability.
Security vulnerabilities in robot control systems have gained increased attention as mobile robots become more connected and autonomous. Many existing frameworks were designed without comprehensive security considerations, leaving systems vulnerable to cyber attacks and unauthorized access. The challenge of retrofitting security measures into existing architectures while maintaining performance and usability continues to evolve.
Industrial applications have gravitated toward proprietary solutions and specialized frameworks such as YARP (Yet Another Robot Platform), OpenRAVE, and commercial platforms like ABB RobotStudio and KUKA.Sim. These systems prioritize real-time performance, safety compliance, and integration with existing manufacturing infrastructure. The fragmentation between research-oriented and industrial frameworks creates significant barriers for technology transfer and scalability.
Emerging cloud-based robotics platforms, including AWS RoboMaker and Google Cloud Robotics, represent a paradigm shift toward distributed computing architectures. These solutions leverage cloud resources for computationally intensive tasks while maintaining local control loops for real-time operations. However, latency concerns and connectivity dependencies remain significant limitations for mission-critical applications.
The integration of artificial intelligence and machine learning capabilities poses substantial challenges for existing frameworks. Traditional control architectures struggle to accommodate the computational requirements and data flow patterns of modern AI algorithms. This has led to the development of hybrid solutions that combine classical control theory with neural network-based approaches, creating complexity in system design and validation.
Real-time performance requirements continue to challenge framework developers, particularly in safety-critical applications. Many existing solutions lack deterministic behavior guarantees, making them unsuitable for applications requiring precise timing constraints. The trade-off between flexibility and real-time performance remains a fundamental design challenge across all framework categories.
Interoperability between different frameworks and hardware platforms represents another critical challenge. The lack of standardized interfaces and communication protocols hinders system integration and increases development costs. This fragmentation forces developers to make early architectural decisions that can significantly impact long-term scalability and maintainability.
Security vulnerabilities in robot control systems have gained increased attention as mobile robots become more connected and autonomous. Many existing frameworks were designed without comprehensive security considerations, leaving systems vulnerable to cyber attacks and unauthorized access. The challenge of retrofitting security measures into existing architectures while maintaining performance and usability continues to evolve.
Existing Mobile Robot Control Framework Solutions
01 Modular software architecture for robot control
Software frameworks utilizing modular architecture enable flexible and scalable robot control systems. These frameworks provide standardized interfaces and components that can be easily integrated, modified, or replaced. The modular approach allows developers to build complex control systems by combining reusable software modules, facilitating rapid development and maintenance of mobile robot applications.- Modular software architecture for robot control: Software frameworks utilizing modular architecture enable flexible and scalable robot control systems. These frameworks provide component-based designs that allow developers to integrate various functional modules such as navigation, perception, and motion control. The modular approach facilitates easier maintenance, testing, and upgrades of individual components without affecting the entire system. This architecture supports reusability of software components across different robot platforms and applications.
- Real-time operating systems and middleware for mobile robots: Real-time operating systems and middleware layers provide essential infrastructure for mobile robot control systems. These frameworks ensure deterministic behavior and timely execution of critical control tasks. The middleware abstracts hardware complexities and provides standardized interfaces for communication between different software modules. This enables efficient resource management, task scheduling, and inter-process communication necessary for coordinated robot operations.
- Distributed control frameworks for multi-robot systems: Distributed control frameworks enable coordination and collaboration among multiple mobile robots. These systems implement communication protocols and algorithms for task allocation, formation control, and collective decision-making. The frameworks support both centralized and decentralized control strategies, allowing robots to share information and coordinate actions while maintaining autonomous operation capabilities. This approach enhances system robustness and scalability for complex multi-robot applications.
- Sensor integration and data processing frameworks: Software frameworks for sensor integration provide standardized methods for acquiring, processing, and fusing data from multiple sensors. These frameworks handle various sensor types including cameras, lidars, and inertial measurement units. They implement algorithms for sensor calibration, data synchronization, and feature extraction to support perception tasks such as localization, mapping, and obstacle detection. The frameworks enable efficient data flow management and real-time processing capabilities essential for autonomous navigation.
- Behavior-based control and planning frameworks: Behavior-based control frameworks implement hierarchical architectures for robot decision-making and motion planning. These systems combine reactive behaviors with deliberative planning to enable adaptive robot responses to dynamic environments. The frameworks support behavior arbitration, priority-based action selection, and goal-oriented planning. They provide tools for defining complex robot behaviors through state machines, behavior trees, or rule-based systems, enabling robots to perform sophisticated tasks while maintaining safety and efficiency.
02 Real-time operating systems and middleware for robot control
Real-time operating systems and middleware layers provide the foundation for responsive and deterministic robot control. These systems ensure timely execution of control commands and sensor data processing, which is critical for mobile robot navigation and operation. The middleware abstracts hardware complexities and provides standardized communication protocols between different software components.Expand Specific Solutions03 Multi-robot coordination and distributed control frameworks
Frameworks designed for coordinating multiple mobile robots enable collaborative task execution and distributed decision-making. These systems implement communication protocols and algorithms for task allocation, collision avoidance, and synchronized operations among robot fleets. The frameworks support both centralized and decentralized control architectures for various multi-robot scenarios.Expand Specific Solutions04 Sensor integration and perception frameworks
Software frameworks that facilitate integration of various sensors and perception algorithms enable mobile robots to understand their environment. These frameworks provide standardized interfaces for processing data from cameras, lidars, and other sensors, supporting simultaneous localization and mapping, obstacle detection, and environmental understanding capabilities essential for autonomous navigation.Expand Specific Solutions05 Cloud-based and remote control frameworks
Cloud-connected frameworks enable remote monitoring, control, and management of mobile robots. These systems provide interfaces for teleoperation, fleet management, and data analytics through cloud platforms. The frameworks support wireless communication protocols and ensure secure data transmission between robots and remote control stations, enabling scalable deployment and centralized management of robot operations.Expand Specific Solutions
Key Players in Mobile Robot Control Framework Industry
The mobile robot control systems framework market is experiencing rapid growth, driven by increasing automation demands across industries. The market demonstrates significant scale with established players like ABB Ltd., FANUC Corp., and KUKA Deutschland GmbH leading industrial robotics, while technology giants Samsung Electronics and Toyota Motor Corp. expand into autonomous systems. The competitive landscape shows high technical maturity among traditional automation companies, with emerging players like Intrinsic Innovation LLC and Sanctuary Cognitive Systems Corp. introducing AI-driven approaches. Chinese companies including UBTECH Robotics Corp. and Aubo Beijing are advancing collaborative robotics, while research institutions like Institute of Automation Chinese Academy of Sciences contribute foundational technologies. The industry is transitioning from hardware-centric to software-defined solutions, with companies like Synaos GmbH and Biosero Inc. focusing on intelligent orchestration platforms that integrate AI, cloud computing, and real-time control systems for next-generation mobile robotics applications.
ABB Ltd.
Technical Solution: ABB has developed RobotStudio, a comprehensive software framework for mobile robot control systems that integrates simulation, programming, and deployment capabilities. The framework supports multiple robot types including mobile platforms and provides real-time path planning, obstacle avoidance, and fleet management functionalities. Their solution incorporates advanced algorithms for simultaneous localization and mapping (SLAM) and offers seamless integration with industrial automation systems. The framework features modular architecture allowing customization for specific applications and supports both centralized and distributed control architectures for multi-robot coordination.
Strengths: Mature industrial automation expertise, robust simulation capabilities, strong integration with existing factory systems. Weaknesses: Higher cost structure, primarily focused on industrial applications rather than general-purpose mobile robotics.
Samsung Electronics Co., Ltd.
Technical Solution: Samsung has developed a comprehensive mobile robot control framework that leverages their expertise in consumer electronics and AI technologies. The framework integrates advanced computer vision algorithms with machine learning capabilities for adaptive navigation and behavior. Their solution features cloud-based processing capabilities enabling distributed computing for complex path planning and decision-making tasks. The framework supports various sensor configurations including RGB-D cameras, LiDAR, and ultrasonic sensors, with sophisticated sensor fusion algorithms for robust localization. Samsung's approach emphasizes user-friendly interfaces and seamless connectivity with IoT ecosystems, making it suitable for both consumer and commercial applications.
Strengths: Strong AI and machine learning capabilities, excellent connectivity and IoT integration, user-friendly interface design. Weaknesses: Less specialized for industrial applications, newer entrant in robotics market, potential concerns about long-term robotics commitment.
Core Technologies in Advanced Robot Control Frameworks
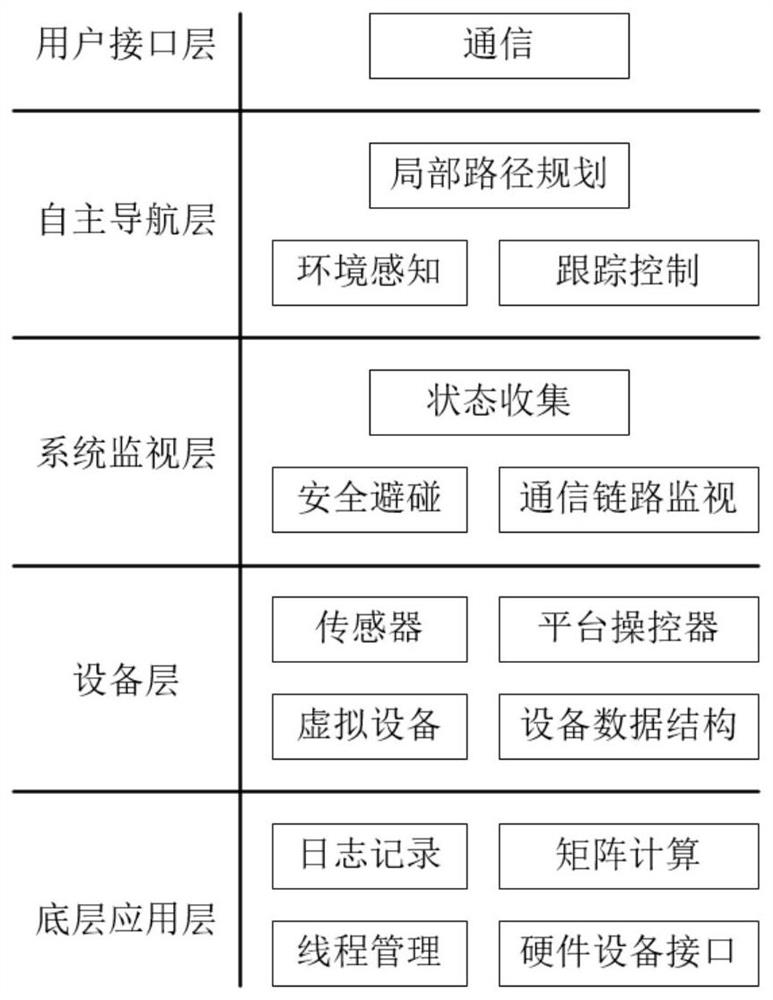
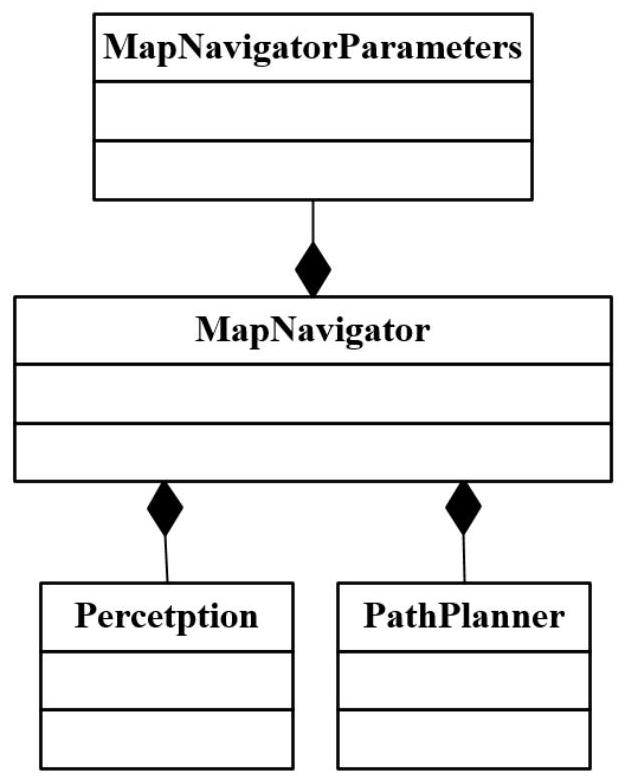
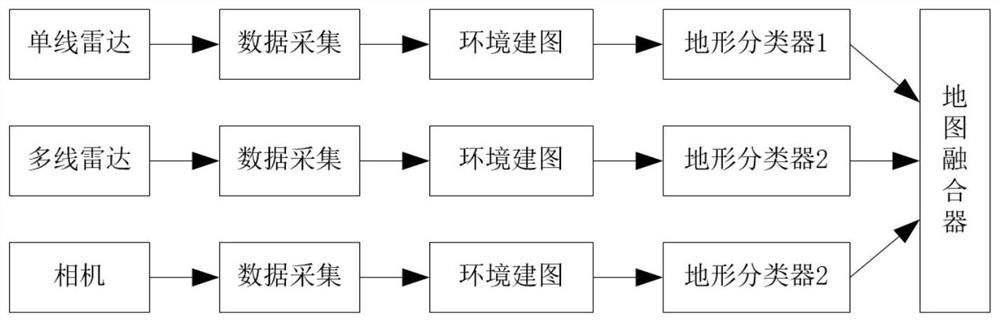
Mobile robot autonomous navigation software framework and navigation method
PatentActiveCN111830977A
Innovation
- A mobile robot autonomous navigation software framework is designed, including user interface layer, autonomous navigation layer, system monitoring layer, device layer and underlying application layer. Each functional module runs in an independent thread and uses shared memory for data interaction to achieve universal It has autonomous navigation processes and standardized data structures, and has complete underlying functions.

Safety Standards and Certification for Robot Control Systems
Safety standards and certification requirements for robot control systems represent critical considerations when selecting software frameworks for mobile robot applications. The regulatory landscape encompasses multiple international standards including ISO 10218 for industrial robots, ISO 13482 for personal care robots, and IEC 61508 for functional safety of electrical systems. These standards establish fundamental safety principles that directly influence framework architecture decisions and implementation approaches.
Functional safety requirements mandate that mobile robot control systems demonstrate systematic capability to detect, respond to, and mitigate potential hazards. Software frameworks must incorporate safety-critical features such as redundant control pathways, fail-safe mechanisms, and real-time monitoring capabilities. The Safety Integrity Level (SIL) classification system requires frameworks to provide documented evidence of reliability metrics, fault tolerance mechanisms, and systematic development processes that comply with automotive standard ISO 26262 or railway standard EN 50128.
Certification processes for mobile robot systems typically involve rigorous testing protocols that evaluate software framework performance under various operational scenarios. Third-party certification bodies assess framework compliance with electromagnetic compatibility standards, cybersecurity requirements, and environmental operating conditions. The certification timeline often extends 12-18 months, requiring comprehensive documentation of software architecture, hazard analysis, and validation testing results.
Regional regulatory variations significantly impact framework selection strategies. European CE marking requirements differ from North American UL certification standards, while emerging markets may lack established certification pathways. Software frameworks must demonstrate adaptability to multiple regulatory environments through modular safety architectures and configurable compliance features.
The economic implications of safety certification influence total cost of ownership calculations for mobile robot deployments. Certified frameworks command premium pricing but reduce downstream certification risks and accelerate market entry timelines. Organizations must balance initial framework licensing costs against potential liability exposure and regulatory compliance expenses when evaluating software platform alternatives for safety-critical mobile robot applications.
Functional safety requirements mandate that mobile robot control systems demonstrate systematic capability to detect, respond to, and mitigate potential hazards. Software frameworks must incorporate safety-critical features such as redundant control pathways, fail-safe mechanisms, and real-time monitoring capabilities. The Safety Integrity Level (SIL) classification system requires frameworks to provide documented evidence of reliability metrics, fault tolerance mechanisms, and systematic development processes that comply with automotive standard ISO 26262 or railway standard EN 50128.
Certification processes for mobile robot systems typically involve rigorous testing protocols that evaluate software framework performance under various operational scenarios. Third-party certification bodies assess framework compliance with electromagnetic compatibility standards, cybersecurity requirements, and environmental operating conditions. The certification timeline often extends 12-18 months, requiring comprehensive documentation of software architecture, hazard analysis, and validation testing results.
Regional regulatory variations significantly impact framework selection strategies. European CE marking requirements differ from North American UL certification standards, while emerging markets may lack established certification pathways. Software frameworks must demonstrate adaptability to multiple regulatory environments through modular safety architectures and configurable compliance features.
The economic implications of safety certification influence total cost of ownership calculations for mobile robot deployments. Certified frameworks command premium pricing but reduce downstream certification risks and accelerate market entry timelines. Organizations must balance initial framework licensing costs against potential liability exposure and regulatory compliance expenses when evaluating software platform alternatives for safety-critical mobile robot applications.
Open Source vs Commercial Framework Ecosystem Analysis
The mobile robot control systems landscape presents a fundamental dichotomy between open source and commercial framework ecosystems, each offering distinct advantages and limitations for developers and organizations. This ecosystem analysis reveals significant differences in development philosophy, support structures, and long-term sustainability models that directly impact framework selection decisions.
Open source frameworks dominate the mobile robotics domain, with ROS (Robot Operating System) serving as the de facto standard. The open source ecosystem thrives on community-driven development, offering extensive modularity and customization capabilities. Frameworks like ROS, ROS2, and YARP benefit from collaborative contributions across academic institutions and research organizations worldwide. These platforms provide comprehensive libraries for perception, navigation, and manipulation tasks without licensing costs, making them particularly attractive for research applications and startups with limited budgets.
The collaborative nature of open source development accelerates innovation through shared knowledge and rapid bug fixes. However, this ecosystem faces challenges in terms of documentation consistency, long-term support guarantees, and enterprise-grade reliability. Version compatibility issues and fragmented development approaches can create integration complexities for large-scale deployments.
Commercial frameworks, including solutions from companies like Universal Robots, ABB RobotStudio, and NVIDIA Isaac, offer professionally maintained ecosystems with guaranteed support and comprehensive documentation. These platforms typically provide integrated development environments, certified hardware compatibility, and enterprise-level technical support. Commercial solutions excel in industrial applications where reliability, compliance, and vendor accountability are paramount.
The commercial ecosystem emphasizes stability and predictable update cycles, often incorporating rigorous testing procedures and quality assurance processes. However, licensing costs, vendor lock-in risks, and limited customization capabilities represent significant constraints for many organizations.
Hybrid approaches are emerging, where commercial entities build upon open source foundations while providing additional proprietary tools and support services. This model combines the innovation benefits of open source development with the reliability and support structures of commercial offerings, creating new opportunities for sustainable ecosystem development in mobile robotics applications.
Open source frameworks dominate the mobile robotics domain, with ROS (Robot Operating System) serving as the de facto standard. The open source ecosystem thrives on community-driven development, offering extensive modularity and customization capabilities. Frameworks like ROS, ROS2, and YARP benefit from collaborative contributions across academic institutions and research organizations worldwide. These platforms provide comprehensive libraries for perception, navigation, and manipulation tasks without licensing costs, making them particularly attractive for research applications and startups with limited budgets.
The collaborative nature of open source development accelerates innovation through shared knowledge and rapid bug fixes. However, this ecosystem faces challenges in terms of documentation consistency, long-term support guarantees, and enterprise-grade reliability. Version compatibility issues and fragmented development approaches can create integration complexities for large-scale deployments.
Commercial frameworks, including solutions from companies like Universal Robots, ABB RobotStudio, and NVIDIA Isaac, offer professionally maintained ecosystems with guaranteed support and comprehensive documentation. These platforms typically provide integrated development environments, certified hardware compatibility, and enterprise-level technical support. Commercial solutions excel in industrial applications where reliability, compliance, and vendor accountability are paramount.
The commercial ecosystem emphasizes stability and predictable update cycles, often incorporating rigorous testing procedures and quality assurance processes. However, licensing costs, vendor lock-in risks, and limited customization capabilities represent significant constraints for many organizations.
Hybrid approaches are emerging, where commercial entities build upon open source foundations while providing additional proprietary tools and support services. This model combines the innovation benefits of open source development with the reliability and support structures of commercial offerings, creating new opportunities for sustainable ecosystem development in mobile robotics applications.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!